

Сталкиваясь с реалиями машиностроительной промышленности, большинство разработчиков программного обеспечения не справляются – уж очень узкоспециализированы продукты, с которыми приходится работать. Это вам не создание программ для интернет-пользователей, компьютеров и даже не мобильные приложения, а потому новички чувствуют себя, как Томас из фильма «Бегущий в лабиринте». Посмотрите, примерно, 50 секунд трейлера – и вы поймете, какой шок испытывают те, кто имеет дело с разработкой ПО для автомобилей впервые.
Все, что у вас есть — это множество терминов и инструментов, о которых вы понятия не имеете. Когда во время собеседования в одной автомобильной компании я поинтересовался, какую IDE они используют, интервьюеру мой вопрос, мягко говоря, не понравился. Я привык к Visual Studio, и наивно надеялся, что здесь для разработки встроенного программного обеспечения понадобится что-то аналогичное. Я даже не представлял, что меня ожидало! Просто море мелких и серьезных (по сложности) инструментов, которым нужна была очередная жертва.
Причем, когда речь идет о разработке программного обеспечения для автомобилей, инструменты отнюдь не единственная проблема. Практически невозможно найти литературу для новичков или просто обучающие материалы, касающиеся библиотек или архитектуры соответствующих программ. Термин «учебное пособие» и вовсе звучит неуместно, ведь сфера автомобилестроения – весьма закрытое сообщество. Да и сообществом ее вряд ли назовешь, ведь при такой конкуренции никто не должен догадаться, как вы создаете ту или иную программу. Чтобы узнать хоть что-то об отдельных инструментах и механизмах этого сегмента программирования, вы можете записаться на запредельно дорогие курсы, но ваша компания должна быть готова выложить немалую сумму и потребуется не меньше нескольких недель, чтобы получить опыт, который вам нужен уже сейчас. Очень жаль, что разобраться в специфике программирования для автомобилестроения так сложно, а потому я решил посвятить свою статью именно этой теме.
Поскольку мне неоднократно приходилось переключаться с создания приложений для интернет-пользователей/компьютеров на разработку встроенных программ и обратно, мне не понаслышке известно о проблемах, с которыми сталкиваются новички, имеющие дело, в основном, с первым блоком продуктов. Аналогичные сложности возникают и у программистов, которые никогда не сталкивались со спецификой автомобильной промышленности.
В этой и следующей статье мне хотелось бы поговорить о принципах работы встроенных программ для автомобилей, а также заглянуть в недра экзотической архитектуры встроенных приложений.
Какие темы мы рассмотрим?
- Как встроенное программное обеспечение повышает производительность автомобиля?
- Как встроенные приложения позволяют управлять автомобилем?
- Какие существуют типичные ограничения CPU?
- Как благодаря встроенным программам осуществляется процесс непрерывной обработки данных с датчиков?
- Как это программное обеспечение структурировано и как отдельные приложения взаимодействуют между собой для управления автомобилем?
Я отвечу на эти вопросы, рассмотрев конкретный пример, а заодно сделаю обзор по разработке архитектуры встроенного программного обеспечения. В качестве примера мы возьмем полностью электронную систему рулевого управления. Это не настоящая модель, но по строению она, в принципе, похожа на то, что вы, скорее всего, видели в своем автомобиле. Мы поговорим подробнее об архитектуре, а затем перейдем к упрощенной схеме, раскрывающей суть функционала системы.
Вы можете посмотреть видео, посвященное разработке электронной системы рулевого управления. Кстати, я тоже работал в этой команде.
Данная модель частично управляется программно. Частично означает, что специализированное ПО лишь помогает водителю, но полный контроль над системой имеет именно он.
Предположим, нам нужно создать полностью электронную систему рулевого управления, в которой руль напрямую не связан с колесами. Вместо этого датчик измеряет угол поворота руля и отправляет полученные данные нашей программе. В автомобильной терминологии это сервопривод. Вы не поверите, но благодаря Nissan на рынке уже появилась модель с сервоприводом.
Работу ПО обеспечивает крошечный процессор или, если говорить точнее, микроконтроллер, по сети подключенный к датчику.
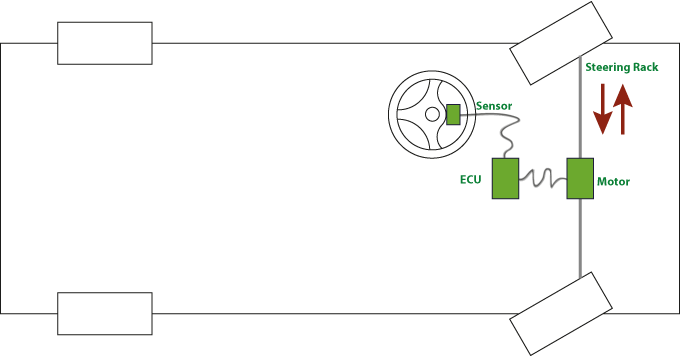
Когда водитель поворачивает руль, благодаря датчику, который постоянно передает информацию о текущем угле поворота, ПО получает соответствующий сигнал. Например, если водитель поворачивает руль на 90 ° вправо, в течение секунды сигнал датчика обрабатывается по следующему принципу:

Помимо этого, ПО также управляет работой электрического двигателя, который перемещает зубчатую рейку слева направо и в обратном направлении, а, значит, изменяется угол поворота передних колес автомобиля. Соответственно, ПО может направить машину влево или вправо. Связь между микроконтроллером, запускающим ПО, и электродвигателем обеспечивается благодаря электронному блоку управления (ECU), в состав которого входит собственно микроконтроллер и усилитель мощности, регулирующий систему питания двигателя. Таким образом, наша программа варьирует подачу тока в двигателе и положение зубчатой рейки изменяется в нужном направлении.

Электронный блок управления (ECU)
При условии, что встроенное программное обеспечение работает корректно, при повороте руля почти мгновенно изменяется положение зубчатой рейки.
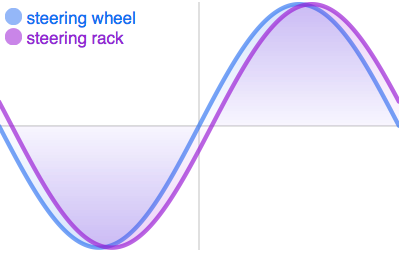
Руль — синий, рулевая рейка — розовый (прим.)
Становится понятно, что даже обработка информации здесь не подчиняется ни логике событийно-ориентированного программирования, как в случае с привычными приложениями графического интерфейса пользователя, ни законам пакетных фалов. Вместо этого требуется непрерывная, своевременная обработка входящих данных. Если программе понадобится слишком много времени, чтобы проанализировать показатели датчиков, рулевая рейка и передние колеса автомобиля будут двигаться с задержкой, и водитель это заметит. Скорее всего, в экстремальной ситуации это приведет к потере контроля над автомобилем, например, при повороте руля в целях объезда препятствия машина не сразу среагирует на маневр. Подобная специфика повышает требования к временным показателям программ для автомобилей, особенно, если учесть ограниченную производительность процессора стандартных электронных блоков управления.
В продолжение серии мы рассмотрим архитектуру программного обеспечения, позволяющую устранить обозначенные проблемы, и, надеюсь, с помощью этих материалов начинающие разработчики встроенных приложений для автомобилей гораздо быстрее освоят базовые принципы, действующие в данной сфере.