

Смертельная авария Tesla с Model S — так себе повод, но, как в анекдоте о драке на свадьбе, «надо же кому-то начинать». Обсуждений много, трактовок происходящего на рынке и причин аварий миллион.
«Да как же он фуру-то не увидел!» и вот этого всего. Не увидел, не справился с ситуацией, да. И автопилот еще долго не сможет справиться с тем, что щелкают белковые выпускники автошкол.
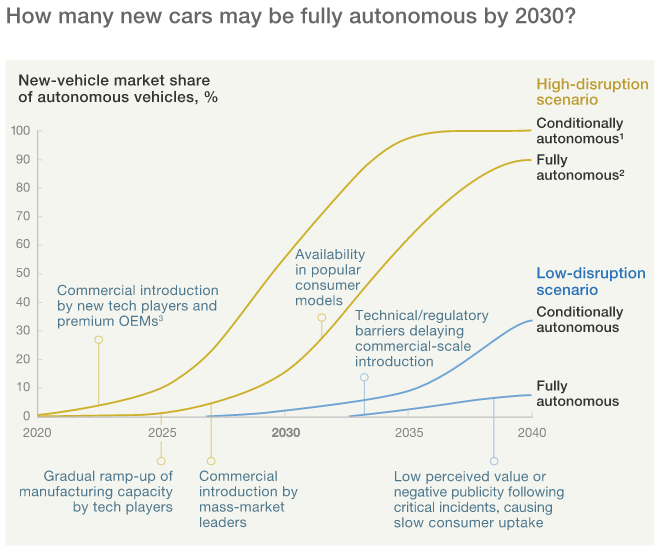
Попробую описать 3 практических сложности, с которыми сталкиваются автопилоты сейчас и которые не выглядят решаемыми в ближайшие годы. Так что когда McKinsey говорит, что к 2030 году в лучшем случае 15% новых автомобилей будут самоуправляемыми, верьте им.
И если что-то пойдет не так, то к 2040 году не более 5% автомобилей можно будет назвать автопилотируемыми.
Почему?
Первая проблема, датчики
Главный тормоз развития автопилотов — не алгоритмы. А отвратительное понимание машиной окружающего пространства. Информации с современных датчиков категорически недостаточно и совершенствование механизма принятия решений (нейросети и так далее) мало что меняет. Сканирующие лидары (черные ведерки, что стоят на большинстве прототипов, включая Google Car) запредельно дороги для серийных автомобилей и не дают необходимой для уверенного движения полноты информации.
Простая иллюстрация: AI побеждает пилота на симуляторе воздушного боя в той ситуации, когда у машины есть полная информация о происходящем. Компьютер проедет вас в любом симуляторе. На дороге этого не произойдет.
И компьютерные полигоны для автономного транспорта , которые обучаются на синтетической информации, ничего серьезно не изменят.
Что делать?
Есть мнение, что при существующих датчиках (камеры, радары, лидары и т.п.) полностью решить проблему самоуправления вообще нельзя. Так что совершенствовать возможности современных датчиков, придумывать новые для корректной «оцифровки» пространства в динамике.
Чем-то похоже на вопрос с аккумуляторами. Пока емкость аккумуляторов не получится повысить в разы, а лучше на порядок, носимая электроника, электрокары и многие другие топчутся на месте.
Вторая проблема, неуниверсальность

Все знакомы с Законом Парето, так вот в автопилотах он тоже выполняется. 80% дорожных ситуаций машины понимают, оставшиеся 20% все портят.
Это не значит, что автопилоты могут ехать по 80% дорог в мире. Это означает, что в рамках любой произвольно взятой поездки 80% ситуаций не вызовут проблем, 20% — вызовут. Опасная пропорция.
Посмотрите на то, что работает. Эти задачи и окажутся самыми простыми. Автобанный автопилот, автопарковка, заезд в гараж — не без помарок, но функционирует.
Разработчикам осталось самое неприятное: проезд пересечений, перестроения в оживленном потоке и еще пара десятков похожих сценариев. С некоторыми кейсами не очень понятно, что вообще делать. Например, автомобилю сложно заранее понять, проедет ли он между двумя близко расположенными препятствиями. И пока невозможно понять свой динамический коридор (то есть границы пространства, которые автомобиль занимает в динамике), а без этого невозможно корректно просчитать дорожную ситуацию.
Существующие автопилоты настолько не универсальны, что требуют каждый дорожный сценарий описывать отдельно. Читали комментарий Mobileye к пресловутой аварии? Официальная позиция такова: система предотвращений столкновений не понимает приезда автомобиля со встречной полосы, году в 2018 начнет.
Что делать?
Клиенту, как минимум, не вестись на эффектные демонстрации на автострадах — это самые простые задачи. Что до игроков, то они пока не понимают, какой путь верен. Отсюда нейросети, ручная разметка сценариев (пишут, что в Mobileye этим занимаются 600 человек, а скоро будет более 1000), виртуальные полигоны и все такое.
Проблема третья, рыночная

Автопилоту или другой фиче мало быть функциональной, нужно стать дешевой. Автомобильной навигации больше двадцати лет. Но при цене системы в пару-тройку тысяч долларов она до сих пор ставится менее чем на 20% всех новых автомобилей. Самоуправляемый функционал еще дороже.
70 тысяч баксов за лидар Velodyne или 30 тысяч за несколько лидаров Sick — перебор, это понятно. Если ориентироваться на серийные автомобили, advanced driver assistance systems, сокращенно ADAS, (которые еще не автопилоты) добавляют к цене 7-12 тысяч долларов. Нормально? Не-а.
Исследование Boston Consulting Group говорит, что потратить на автопилот более 5 тысяч долларов готовы только 17% покупателей (американских покупателей, замечу). То есть чтобы завоевать хотя бы 15 процентов рынка, системе автопилотирования нужно стать грубо говоря на порядок умнее и вдвое дешевле, чем сейчас. Это не выглядит близкой перспективой.
Так что помощников с элементами автопилотирования (автопарковка, автодвижение в пробке, движение по трассе с разметкой или даже конвойные режимы) в ближайшие пару-тройку лет будет все больше. Автопроизводители удешевят и масштабируют эти функции, не проблема. Toyota предлагает свой простейший Safety Sense всего за 500-1000 долларов, это немного.
А в сложных ситуациях (те самые 20 процентов поездки) управление на долгие годы останется на человеке. Почему? См. пункт 1 — машина не может адекватно оценить происходящее и в ближайшее время не научится.
Так что делать?
Привыкать к аббревиатуре ADAS, которая в ближайшие пять лет станет такой же привычной как стали ABS и ESP. После 2020 года стоит ждать активного госрегулирования в этой области, системы активной помощи станут обязательными в Европе и США.
И понимать, что полноценного автопилота пока на рынке нет, и вообще у них (пока) неустранимые проблемы.
Дальше подробнее о первой проблеме, датчиках.
Комментарии (343)

ploop
12.07.2016 13:23+2Дальше подробнее расскажу о первой проблеме — датчиках.
Это в следующем посте, или вы случайно не дописали?
А то как-то быстро оборвалось…
kaichik
12.07.2016 13:28+1В следующем, иначе совсем простыня получится.
igruh
12.07.2016 17:51+3По мне — так простыня со всеми фактами и выводами лучше. А так — затронули интересную тему и бац — «ждите ответа в следующей серии».

justhabrauser
13.07.2016 08:48А интрига?..
Ну а если серьёзно — IMHO всё правильно: девочки — налево, мальчики — направо. Проблемы автопилотов — отдельно, проблемы датчиков — отдельно.
Это я как автоматчик-телемеханик считаю.

alltiptop
12.07.2016 13:23>«Да как же он фуру-то не увидел!» и вот этого всего. Не увидел, не справился с ситуацией, да. И автопилот еще долго не сможет справиться с тем, что щелкают белковые выпускники автошкол.
Есть такая коварная бессердечная статистика, которая говорит об обратном — белковые выпускники автошкол больше похожи на леммингов из известного фейка.kaichik
12.07.2016 13:29+13Увы, выпускник с правами доедет из центра Москвы до своей дачи. Ни один в мире автопилот — нет.

impetus
12.07.2016 18:58+2Хм, в пятницу вечером… Боюсь, что далеко не каждый свежий выпускник доедет — без создания нескольких (десятков) (потенциально) аварийных ситуаций — причём и в толчее в городе, и потом ночью на скорости на трассе. Ой не каждый. Вообще не факт что даже хоть один доедет.
esc
13.07.2016 01:52+2Та любой, кто ходил в норм. школу, не прогуливал занятия и не страдает патологической неспособностью к вождению, доедет. Пусть первая поездка и съест прилично энергии. Не такая уж и сложная задача.
aquamakc
12.07.2016 14:50Какая такая статистика? Процентное соотношение аварий к общему количеству авто с биологическим управлятором и электронным, пожалуйста.


tmin10
12.07.2016 13:30+15Мне кажется, дело всё же в алгоритмах: у человека всего 2 глаза, но с помощью них своей нейронной сетью (потребляя не так много ресурсов) он уверенно распознаёт объекты на дороге, считывает данные со знаков. Если машину оснастить большим числом таких камер, то она получит намного превосходящий объём информации, чем доступный человеку. Недорогие лазерные дальномеры впереди и сзади также не помешают при парковки.
kaichik
12.07.2016 13:44-4Так-то да, но дьявол кроется в деталях.
По разным оценкам (и британских ученых тоже) разрешение глаза от 150 до 500 мегапикселей, то есть наш мозг умеет в реалтайме обрабатывать поток со стереокамеры 150 мегапикселей 25 кадров в секунду.
Для сравнения — железный блок, который умеет в реалтайме обрабатывать поток с 4 стереокамер, пусть даже каждая из которых Full HD, выглядит так
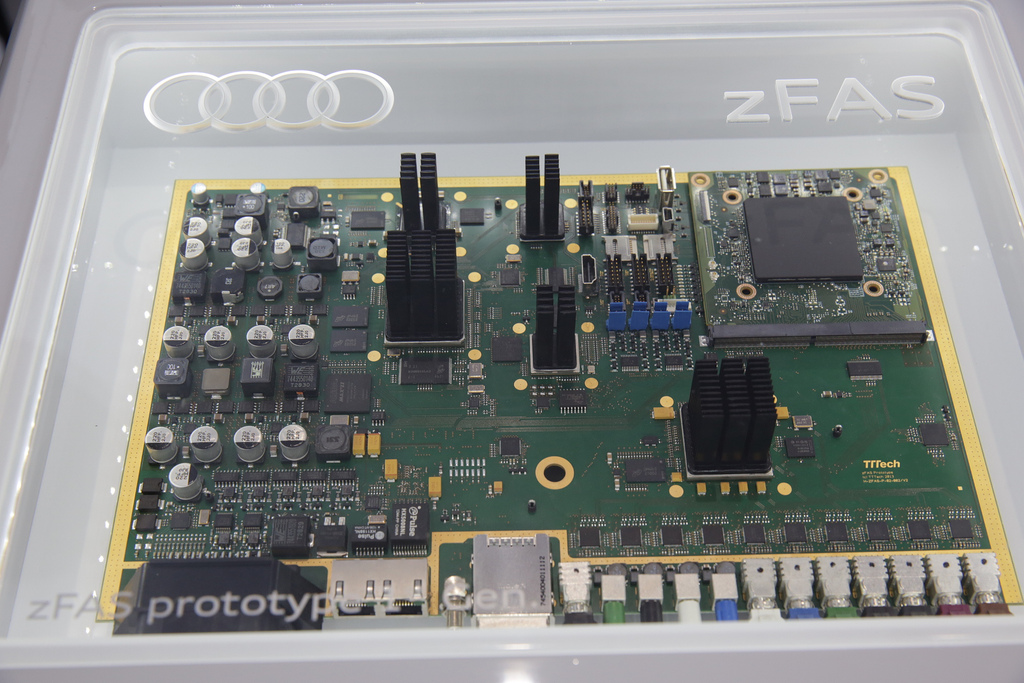
И это всего 8 мегапикселей получается.
Итого разница на два порядка, а на самом деле больше: человек имеет возможность сканирования, голову поворачивает.glockbender
12.07.2016 13:51+6Понятие «разрешения» для глаза очень условно: https://www.youtube.com/watch?v=P6Jqp9AfJLU
ploop
12.07.2016 13:52+15Дело не в мегапикселях.
Поставьте человеку в кабину вместо стёкол три монитора (центральный и по бокам), даже не HD, а снаружи камеры, и он спокойно проедет. Аккуратнее чем обычно с непривычки, но проедет.
Вы посмотрите, что вытворяют люди на спортивных дронах с FPV :)kaichik
12.07.2016 14:06+4Я присутствовал на соревнованиях и знаю, с какой попытки они все это вытворяют. Так что на самом деле дело во всем :).
Что касается экранов внутри — я и не спорю, что человек поедет. Точно так же, как и автопилот, то есть медленно и аккуратно, вставая в хоть немного сложных ситуациях.
Избыточность получаемой информации, пусть его выражает разрешение, очень важна. Например, даже при сужении поля зрения при движении на высокой скорости позволяет различать вдали предметы. Позволяет видеть что-то периферическим зрением. Да много что позволяет.
И все это с минимальным лагом поступления картинки в мозг и обработки. Компьютерное изображение с камер пока еще процессится долго.ploop
12.07.2016 14:09+5я и не спорю, что человек поедет. Точно так же, как и автопилот, то есть медленно и аккуратно, вставая в хоть немного сложных ситуациях.
выпускник с правами доедет из центра Москвы до своей дачи. Ни один в мире автопилот — нет.
Так проедет или нет? :)
Я согласен, что на данном уровне развития — скорее нет. Точнее, проедет, если очень-очень повезёт. Но дело не в дорогущих датчиках, а именно в алгоритмах, и железе, способном их переварить.kaichik
12.07.2016 14:26OK, в предельном случае ваша правда :).
Но в предельном же случае для этого придется создать ИИ уровня человека, в чем пока есть принципиальные сомнения :).
tmteam
13.07.2016 01:09Не уровня человека. Просто алгоритм, превращающий показания с n- камер в три де картинку со скоростями и ускорениями

cattheblack
12.07.2016 17:50+2Тут сложнее, мне кажется, монитор ведь плоский. Параллакс нам важен. Небольшие движения головы и стереопара глаз дают много больше камеры. Я как-то по техническим причинам ехал с одним глазом. Маршрут знакомый, трафик низкий, но было очень плохо. И то движения головы для оценки глубины я мог совершать.
Получается, для экранов всю нашу нейросеть, все рефлексы надо переучить. А то езда только «от сознания» получается, как первый раз за рулём.
Но доехать, конечно, может получиться, если на дороге будет тишина и безмятежность.tmin10
12.07.2016 22:56Думаю, всё это дело привычки, мозг очень гибкий инструмент и сможет приспособиться к новым условиям. Были же эксперименты, когда люди зеркалами переворачивали картинку, поступающую в глаз. Какое-то время было ужасно, а потом мозг адаптировался и человек мог нормально продолжать деятельность.
cattheblack
12.07.2016 23:27Линзами вроде. В глазу изображение переворачивается оптикой, мозг вертит снова. В очках просто переставал. Потом обратно быстрее переключался. Это штатная функция. А вот без данных о глубине/дальности сильно плохо будет, особенно с чёрными машинами.
Mad__Max
14.07.2016 02:30Линзами это переворачивание верх-низ. И мозг к такому по-идее "от природы" готов, т.к. и так с рождения видит перевернутую картинку и "программно" ее разворачивает в правильное положение. Надо просто перестать это делать и обрабатывать "напрямую".
Были еще опыты именно с зеркалами, чтобы инвертировать картинку по оси лево-право или скажем повернуть все изображение под углом в 45 градусов и озадачить мозги проблемкой, с которой он в природе не сталкивался (в отличии от переворота изображения от линзы глаз). И к таким вывертам мозг тоже мог адаприроваться и через какое-то время человек начинал видеть все нормально, хотя в глаза приходила картинка в зеркальной инверсии или повернутая вбок по диагонали.
cattheblack
14.07.2016 08:52Про зеркала не читал, спасибо за информацию. Но, мне кажется, это предварительная обработка изображения, выполняемая до распознавания образов. Она не влияет на количество получаемой информации. По аналогии с машинным зрением, там же сначала предобработка, «нормализация» (цвето-световая, геометрическая), а потом уже само распознавание. И далее по аналогии — если из стереозрения выкинуть одну камеру, стерео не будет. Для точно знакомых объектов и мест может и просчитаем глубину, но для любых неизвестных будут сюрпризы.

Visphord
13.07.2016 09:11+3я всю жизнь езжу с одним глазом, кроме оценки расстояния (насколько я понял с двумя глазами оценивать расстояние «проще» — мне же для оценки нужно хоть какое-то движение будь то меня или объекта, т.е. мне требуется как минимум 2 «кадра») все остальное не доставляет дискомфорта. Даже при высоком трафике в дефолт-сити.
cattheblack
13.07.2016 09:57Если долго учиться — почти всё может получиться, кто же спорит ;) Но вот с экранами так не выйдет — ни сменой фокуса глаза, ни микродвижениями головы не получить информацию о дальности, только размеры объекта, возможно много опасных глюков. Я же и писал про движения головы для параллакса (объект может обмануть).
P.S.> со своими -13 тоже без очков и ходить могу, не обнимаясь со столбами, и даже иной раз людей узнавать издали, но ошибок многовато для комфортной жизни.
ploop
13.07.2016 09:57Параллакс нам важен.
Расстояние между глазами около 10см, две фронтальных камеры можно расположить на 2м друг от друга. Параллакс в 20 раз круче обеспечен. И это только две, их спереди можно и больше поставить, если потребуется, так как цена на них не так уж и высока.cattheblack
13.07.2016 10:01Я писал о том, что «замени стёкла в машине экранами — ничего не изменится» — не совсем корректное утверждение. Там нет глубины. Разве что «стереоэкранами», но всё равно не то будет.
Да, а переучить наш мозг на другую стереобазу быстро не выйдет, я думаю.ploop
13.07.2016 10:37Да про стёкла я пример привёл, чтобы показать, что мозг даже из плоской картинки (одна камера) вполне построит 3D-модель, дополнив недостаточные данные стандартными паттернами. И эта модель в подавляющем большинстве случаев будет верна, если целенаправленно его не обманывать. Естественно, при бОльшем количестве информации ошибок будет ещё меньше, применительно к человеку — езда будет комфортнее при прочих равных. Но ехать он сможет и так, и так, а автопилот по одной камере — нет. Надеюсь, пока нет.
cattheblack
13.07.2016 10:57Эти домыслы мозга на основании старого опыта, боюсь, неточны будут. Только кажется, что всё так же. Думаю, сработает только в простых ситуациях, хотя их на дороге, и правда, большинство. А в непростых, вероятно, будет машина также под грузовиком, никакой разницы.
Ехать-то сможет, только гораздо медленнее и аккуратнее. И если не будет нештатных ситуаций. Слишком много потеряется. Я рулил с ноутбука радиоуправляемой газелькой по камере — всё не то и всё не так, даже после долгих тренировок. Доедет — да, «спокойно» — только применительно к скорости.ploop
13.07.2016 11:39Эти домыслы мозга на основании старого опыта, боюсь, неточны будут.
Да, я именно об этом.
Добавляем к этому опыту ещё один глаз + 360 обзора + свободу головы на полметра — получаем идеального белкового водителя.
Такой же поток информации для автопилота обеспечат всего 4 камеры (даже больший, т.к. они не «сканируют» участок поворотом «головы», а снимают одновременно). Добавим сюда другие недорогие датчики, типа дальномеров, акселерометров, навигаторов, возможности «видеть» в других диапазонах — всё, по входной информации мы на порядок
переплюнули человека. Осталось всё это переварить…
glockbender
13.07.2016 10:02Полностью поддерживаю, т.к. сам один раз столкнулся с данной проблемой. Мне почему-то сразу вспомнилось вождение авто в любом авто-симуляторе. Самое сложное в этом деле — оценка расстояния до поворота при торможении «на глаз». Именно поэтому в современных автосимах придумали линию с траекторией, которая краснеет при более высокой скорости, чем нужно.
aquamakc
12.07.2016 14:52Это общее количество условных мегапикселей, но если учитывать общую забагованность и костыльность системы «Человеческий глаз» реальные показатели хуже.
kraidiky
12.07.2016 15:39+5Дело не в разрешении, а выборочном внимании, которое есть у человека, и пока крайне редко реализуется в нейросетях. Там сложные алгоритмы пока не выгодно делать если есть возможность поставить ещё десять стоек серверов. ПРичём причин сразу две. Во-первых, слабое развитие рекурентных сетей, способных накапливать контекст, во-вторых, то что купить ещё 10 серверов даже не столько дешевле, сколько быстрее, чем отладить алгоритм.
В момент когда отдача на капиталловложение в грубую компьютерную силу станет меньше чем в алгоритмику ситуация изменится.
Ну и да не забываем, что в 2012-ом году впервые интеллектуальные леменги ломанулись в свёрточный нейросети и вот мы здесь, а компьютер знаки различает лучше человека, например.
Сейчас, если вы присмотритесь к новостям, интеллектуальные леменги, такие как и, собственно, ломапнулись в рекурентные сети. Ни сколько не удивлюсь, если вопрос динамического коридора, сводящийся к накоплению контекста, через 4 года будет решаться из коробки несколькими готовыми пакетами. Так же как задачи безошибочного распознования голоса при отношении «сигнал/шум» в пользу шума. Так же как и вопросы былых фур на фоне светлого неба. Нейросеть, неуверенная что именно она увидела в доступном ей разрешении будет «вглядываться» в картинку высокого разрешения, и помечать сомнительный объект.
Пока что на средней дистанции реальным ограничением будут не нейросети. Потолок их развития на данном этапе пока что не прощупывается.
А вот остальные аргументы про цену и тому подобное — тут я с вами полностью согласен.kaichik
12.07.2016 16:01Спасибо, интересно. Не могу возразить по сути прогресса нейросетей, но не совсем понимаю как они смогут преодолеть принципиальный недостаток информации. Например, хватит места между двумя машинами или нет, если это место нельзя точно оценить.
Вероятностный подход, который я так понимаю близок нейросетям, здесь не очень применим, автопилот должен быть уверен в безопасности маневра (если только отказ от маневра не станет еще более опасным).
osvirt
13.07.2016 14:25я — человек, не особо образованный (в плане получения высших образований). Поэтому, наверное, мне легче вспоминается, что размер объекта на расстоянии можно вычислить, имея в руках одну лишь линейку, не прибегая к знаниям о всяких там нейросетях и прочих умных словах.
Так что, имея данные о расстоянии и картинку, можно легко всё посчитать.
Вопрос остаётся за малым: определить где именно на картинке авто, а где нужный просвет. Вот тут, походу, и придётся изучать всякие умные слова.
Ну и самый главный вопрос: а зачем автопилоту эти данные? Не думаю, что он когда-нить будет рассчитан на агрессивную манеру езды (вклиниться между потоками на перекрёстке, т.к. на работу опаздывает) или устанавливаться на машины скорой помощи, полиции или МЧС.
пы.сы. Не знаю, как там в европейской части России, но в тех городах, где я бывал за Уралом, нужен беспилотный Камаз, создатели которого утверждают, что он ништяк справляется с российскими дорогами. Но я чё-т не хочу менять камри на камаз…
migelle74
13.07.2016 16:11> Но я чё-т не хочу менять камри на камаз…
А зря. Если автопилот на камазе помигает поворотником и начнет перестраиваться, то его обязательно пропустят, а вот, камри могут не пустить. :)

Stalker_RED
13.07.2016 04:50Цена — тоже так себе аргумент. 9 лет назад первый айфон казался чудом и стоил как кусок золота. А сейчас его любой китайфон уделывает по всем параметрам, кроме шильдика.
hokum13
12.07.2016 16:5516 мегапикселей. 4 пары камер по 2 мегапикселя.
Играя в компьютерный симулятор человек использует максимум 8 мегапикселей (у меня монитор всего на 2) своего зрения (остальная инфа — шлак). А скорость происшествий в симуляторе куда выше чем в реальности (не каждый день разгоняешься на феррари до 300 или отбиваешься от толпы монстров). Так что да — человек круче компа. И нет, система распознавания образов для вождения не нуждается в камере в 500 мегапикселей цветного зрения. Для автоматического парктроника хватает и вовсе 20 пикселей.kaichik
12.07.2016 17:058 мегапикселей со стерео-источника, я же глаза не удваиваю при расчете.
Не понимаю, причем тут симулятор и крутость компа. Я же привожу ссылку выше — в нормальных симах, а не аркадах, ИИ выбивает профессионального человка.Aclz
12.07.2016 19:17А вы уверены, что в этих «нормальных симах» у компьютера на входе лишь видимое изображение из кокпита? Я в этом сомневаюсь. Потому как, если у него данные с радиолокаторов, ответчиков «свой-чужой» и пр. — это совсем другая история, неприменимая к наземному применению (где стоит задача идентификации и фильтрации каждого объекта среди множества не относящегося к контексту мусора).
Не слышал, чтобы хоть одна нейросеть, скажем, сносно играла в какой-нибудь CS:GO, глядя лишь на экран монитора: все компьютерные боты оперируют совсем другими, гораздо более детерминированными данными.kaichik
12.07.2016 19:43Разумеется ИИ должен располагать той же полнотой информации, что и человек. Полагаю, что это правило было соблюдено. И чем больше поток информации, тем большее преимущество имеет машина.
Насчет CS-ботов — да, они обычно читят. Кстати, а есть популярные игры, в которых можно написать скрипты для ботов?
hokum13
13.07.2016 08:39К железке, я думал, fullhd камеры цепляются, из этого и расчет. А если Вы говорите что две 2MP камеры превращаются в одну 2MP стереокамеру, то немного лукавите, т.к. это требует предварительной обработки.
Я не про то: когда в симе или аркаде смотришь через 2 мегапикселя, то этого хватает чтобы безаварийно ехать даже с превышением скорости, не то что по правилам.
Mad__Max
12.07.2016 17:40+4Нет никаких 150 мегапикселей. Это всего-лишь "программная эмуляция" в мозгу, а не реальные характеристики глаз.
При цветном(дневном) зрении поток информации от глаз единицы мегапиксей на "кадр". Которые еще и очень сильно сжимаются с большими потерями еще до того, как их начнут обрабатывать зрительные центры мозга. Поток информации по зрительным нервам доходящим до мозга сравним 1 мегапикселем на кадр.
Такое удельное разрешение достигается только в очень узкой области (1-2 объемных градуса) на которых сфокусирован в данный момент взгляд. А потом мозг из довольно мутной общей картинки + выхватываемых выборочно по очереди маленьких кусочков центрального острого зрения с высоким разрешением создает иллюзию того, что все вокруг видим с подобным высоким качеством. Но это лишь иллюзия ("програмная эмуляция")
В результате если долго рассматривать статичную картинку — когда глаза и мозг могут ее долго "обшаривать" и потом из кучи отдельных четких кусочков склеить в мозгу детализированную картину — глаза существенно превосходят современные камеры (хотя в этом случае сравнивать с видеокамерой вообще некорректно — аналогом будет фотоаппарат, а не видеокамера). А вот в динамике — т.е. восприятия быстро меняющегося изображения возможности глаз и зрительного нерва даже до приличной FullHD камеры не дотягивают. Всю остальную "магию" творят алгоритмы обработки (биологические нейронные сети мозга).

sim31r
13.07.2016 02:07Согласен. Пример наглядный, картинка 640х480 (0.3 мегапикселя) из игры «найди кота», можно минут 20 глазом сканировать по зонам, пока найдешь что нужно, ни о каких 500 мегапикселях и речи нет. После нахождения нейросеть мозга обучается, и уже сам недоумеваешь, вот же кот, как его можно не заметить было?
Mad__Max
14.07.2016 02:57Да, потому что области центрального наиболее острого зрения (которое нужно если на изображении много мелких деталей) разрешение глаза вообще порядка 30килопикселей (0.03 мегапикселя), т.е. даже картинку в 640х480 за раз (один "снимок"/"кадр") глаз передать не может — только где-то 1/10 с максимальным качеством, а все остальное с довольно низким дающим только общее представление о том, на что смотришь. В теории нужно минимум 10 "снимков" с небольшими смещениями глаз после каждого, чтобы просканировать такое изображение с максимально возможным качеством и собрать в мозгу полную картину.
На практике — еще в разы больше, т.к. области "сканирования" идут с перекрытием(наложением) друг на друга, да и алгоритм выборки(как маленькими кусочками покрыть всю площадь) очень далеки от оптимальных.
Частично спасает только то, что глаза это делают весьма быстро и неосознанно — человек обычно даже не замечает, что у него глаза на самом деле постоянно немного прыгают вокруг той точки в которую он смотрит и "обшаривают" окрестности зоной максимальной остроты зрения.
tretyakovpe
13.07.2016 15:00Еще есть такой момент — мозг видит движение. Т.е. если картинка не меняется, то и информация о ней не обрабатывается. Поэтому приходится «сканировать» неподвижное изображение. Когда едешь за рулем, картинка по определению движется и информации поступает гораздо больше.
glockbender
12.07.2016 13:50+1Вы, однако, не учитываете, что помимо зрения у человека есть и другие органы чувств, в том числе вестибулярный аппарат (чувство равновесия и положения в пространстве, ускорение, ощущение веса). Определенно, я согласен, что несовершенство алгоритмов имеет место быть. Но тут, скорее комбо из двух очевидных проблем.
tmin10
12.07.2016 13:51+3Ну уж акселерометры и гироскопы сейчас довольно точны и, скорее всего, превосходят природные аналоги.
ssneg
12.07.2016 14:24+2Вестибулярный аппарат человека легко обманывается, что нередко приводит к печальным последствиям. Например, увеличение горизонтальной скорости пилот самолета ощутит как подъем вверх — так работает среднее ухо — и на основе неверной инорфмации о пространственном положении самолета, примет неверные решения. И упадет. Заранее извиняюсь за ссылку.
glockbender
12.07.2016 14:42Однако это не меняет сути сказанного мной выше. Если Вы «обманете» вестибулярный аппарат водителя (особенно неопытного), то шанс фатальной для него ошибки существенно возрастет. Как мне кажется тут как раз прослеживается очень сильная зависимость от опыта вождения: т.е. чем меньше его(опыта), тем больше приходится задействовать органы чувств и тем более активно анализировать ситуацию. И наоборот: чем больше опыта (огромного списка ситуативных паттернов), тем менее полно и всеобъемлюще требуется вникать в дорожную ситуацию и моделировать возможные сценарии (ибо они все уже записаны в памяти). Если у Вас есть опыт вождения от 2 лет, Вы, определенно это заметите (т.н. «вождение на автомате»).

artyfarty
14.07.2016 18:52Наверное случалось с многими:
Вы плавно тормозите перед светофором в потоке машин. Аккурат под конец вашего торможения весь поток плавно начинает ехать (загорелся зеленый). Вы в полных непонятках, "почему я еду назад?", а вестибулярный аппарат еще и подыгрывает мозгу.
Idot
13.07.2016 07:14+1Недорогие лазерные дальномеры
Недорогие — означает, песец глазам как водителей и пешеходов. «Ведёрко» от Гугл, расположено как раз на уровне глаз, а теперь представь такое же, но максимально дешёвое «ведёрко» от noname производителя, которое будет тебе светить в глаза. (лидары Теслы — расположены внизу, но из-за этого способны парковаться под фуру, потому что её не видят)
Дальномеры — должны быть БЕЗОПАСНЫЕ! Я бы вообще от лазера в пользу радара отказался. Потому что нет желания менять ослепшие от лазеров глаза на протезы.
ksil
15.07.2016 11:54были бы еще эти протезы…
хрусталик еще с горем пополам меняют, а вот выжженную сетчатку вряд ли.
Trept
12.07.2016 13:42+14Про 80% разрешимых и 20% неразрешимых, как минимум, голословно.
И закон Парето тут притянут за уши.
Эдак можно сказать про любую ситуацию: 80% пешеходов дойдут до цели, 20% не дойдут; 80% самолетов долетят, 20% не долетят; и т.д.kaichik
12.07.2016 13:54-6Вы сами придумали формулировку и сами ее опровергли. Только я писал о другом.
А именно — что при существующем уровне развития технологии часть ситуаций отрабатывается корректно, часть с проблемами. Точной статистики, конечно нет, как и методики сбора. Но тем и хорош Закон Парето, что плюс-минус справедливо описывает подобные сценарии.Trept
12.07.2016 15:29+7Цитирую: «Все знакомы с Законом Парето, так вот в автопилотах он тоже выполняется. 80% дорожных ситуаций машины понимают, оставшиеся 20% все портят.»
Простите, но это полная лажа.
Вроде утверждения: «Встречу или не встречу динозавра на улице сегодня — вероятность 50%».
Нет статистики — так и скажите прямо.
Жаль, что такие перлы портят хорошую в целом статью.Malachi108
12.07.2016 17:07+1Оффтопик: в случае с динозавром там вероятность вообще единица, ну или по крайней мере стремится к ней ассемптотически. Попробуйте пройтись по улице в светлое время суток и не встретить хотя бы один экземпляр ru.wikipedia.org/wiki/Columba_livia например.
Trept
12.07.2016 17:24Продолжая оффтопик.
Ваш пример (при допуске, что птицы=динозаврам) не противоречит приведенному мной.
Все оценки должны основываться на соответствующей статистике, которая опирается на некоторые допущения.
Голословные отсылки к Парето, или, скажем, к Мандельброту, чем тоже часто грешат, удивляют у тех, кто смеется над 50% вероятностью динозавра.
kaichik
12.07.2016 17:11-6А, теперь понятно что так задело. Статистики нет, но для того и существуют оценки, чтобы оценить неизвестное. Я свою привел.

VenomBlood
12.07.2016 22:41+2Статистики нету, поэтому да, 80% ситуаций выполняется, 20% не выполняется, с погрешностью в первом случае +20/-80пп, во втором +80/-20пп соответственно. Без статистики вы даже доверительный интервал не рассчитаете, это чисто пальцем в потолок.

worldmind
12.07.2016 18:11Человек спросил откуда инфа что часть ситуаций не обрабатывается корректно? Я вот слышал только про курьёзы вроде https://geektimes.ru/post/261078/
IgorKh
12.07.2016 13:46+4>Главный тормоз развития автопилотов — не алгоритмы
>Есть мнение, что при существующих датчиках (камеры, радары, лидары и т.п.) полностью решить проблему самоуправления вообще нельзя
Наброшу свое дилетантское мнение. А какими датчиками пользуется человек для управления автомобиля? Как я понимаю 90% это несовершенные глаза, склонные к тому же моргать, закрываться от усталости, слепиться от яркого света и плохо видеть в темноте. Любая современная камера даст им сто очков вперед. Сделать автомобилю 360 градусный обзор с камер не проблема, так что вопрос именно в алгоритмах и вычислительной мощности. Радары/лидары именно что компенсируют этот недостаток вычислимой мощности и упрощают алгоритмы.
Обратная связь от «руля и прочих сидения» я не рассматриваю, так как без нее вполне можно жить, да и оцифровать ее акселерометром — тоже не проблема, как и звуки.
zerocool56
12.07.2016 14:17-4Эти «несовершенные» глаза по возможностям, уровням и прочему повторить пока ни у кого не получилось, не то что превзойти…
IgorKh
12.07.2016 14:41ИМХО превзойти не удается обработку мозгом того что поступает с глаз, а так сейчас вполне доступны матрицы которые будут еще и частично ИК+УФ спектр захватывать, что уже несомненный плюс к полноте картины мира. А насчет разрешения — газеты из космоса ведь читаем, так что при этом человека за сотню метров не рассмотрим? Опять же вопрос в обработке информации, разпознавании образов, прогнозировании поведения и тд
Ну и не стоит забывать что камеры — относительно дешевое решение, потому их натыкать можно от души и с запасом, с разными спектрами, и объективами, распознавать дальние объекты одними камерами, ближние другими и тдkaichik
12.07.2016 14:50Сама камера — дешевое решение, вопрос в возможности обработать информацию с нее. Чем больше камер, тем сложнее это делать. Решение для нескольких десятков камер оказывается неприемлемым для автомобилей с точки зрения стоимости, габаритов и надежности.
IgorKh
12.07.2016 14:56вот к этому я и веду, что проблема все таки в недостатке вычислительной мощности. Посмотрим что там Nvidia через пару лет выкатит, судя по всему они уже всерьез озадачились этой проблемой :)
aquamakc
12.07.2016 14:59+1проблема в том, что с ростом вычислительной мощности кремниевых кристаллов растёт энергопотребление и тепловыделение, текущее направление развития рано или поздно упрётся в тупик.
IgorKh
12.07.2016 15:24ну не так все плохо сравните производительность/Ватт компов пятилетней давности и современных, не говоря уже о специализированных процах…

saboteur_kiev
12.07.2016 15:34+1И четвертое поколение интелов все еще быстрее и производительнее для обычных вычислений, чем пятое и шестое.
Вперед идут только распарралеливание и специализированные процы, плюс хардварная поддержка видео и аудиокодеков.Garbus
12.07.2016 16:26+1Хех, практически то же самое писал, но кусочек от поста все же оставлю:
Для примера, стоит у меня процессор i7 2500k. Но различия по производительности в разы с современными не видать, хотя и хотелось бы солидного прироста от возможной замены.
sHaggY_caT
13.07.2016 14:29сейчас увеличение числа транзисторов на единицу площади при смене техпроцесса тратят на линпак/ватт:
На самом деле, быстрые CPU в десктопах нужны только гикам и учёным, всё уходит в облака — в дата-центре важен именно линпак/ватт, а не пиковая производительность с любым энергопотреблением, тоже самое для абонентских облачных терминалов — смартфонов, планшетов, ультрабуков — новые техпроцессы используют для увелечения их автономности, ведь локальная производительность не нужна — всё равно главные вычисления идут на стороне облачного провайдера.
Даже геймерам быстрые CPU не нужны, их интересуют почти исключительно быстрые видеокарты.saboteur_kiev
13.07.2016 16:05В играх не все просчитывается видеокартой, поэтому геймеры любят Intel Core i7-4790K и ддр3. А процессоры более новые в плане частоты ненамного быстрее, зато НАМНОГО дороже.
sHaggY_caT
13.07.2016 18:48новые быстрые процессоры просто никому не нужны(кроме гиков). Рынку нужны процессоры с высоким отношением линпак/ватт, и в этом вопросе и двигался прогресс все последние годы.
Линпак/ватт важен и для клиентов облаков, что бы подключение к поставщику SaaS услуги(от Gmail и фейсбука до всяких CRM, ERP систем, итд) сохранялось как можно дольше, и отрисовка интерфейса не тормозила, но ещё более он важен собственно для дата-центра.
Нет платежеспособного спроса на быстрые процессоры, без оглядки на энергопотребление, нет и предложения (и спрос 2.5 гиков это не платежеспособный спрос! Нет объемов!)
So, сама не геймер, но специально спросила у 4-х знакомых геймеров, у них вовсе не Intel Core i7-4790K. По их словам, они не особенно задумывались над выбором CPU, у всех 4-х разные модели, хотя у всех конечно i7saboteur_kiev
13.07.2016 19:02Если не особенно задумывались, значит не фанатичные геймеры ;)
Intel Core i7-4790K, уже два поколения назад, а все еще считается одним из лучших среди мощных процессоров для игр.
Понятно, что геймеры это не целевая аудитория для производителей процессоров. Они целевая аудитория для видяшек/мышек/наушников/корпусов… память еще.
Garbus
13.07.2016 20:15Хех, то-то разрушения в играх очень редки, скриптованы и слабо влияют на геймплей? Зато искр, тумана и разных шейдеров на каждом углу натолкано. Сложно сказать, что не дает издателям делать более «живое» окружение, но движение в этой области редкое и неуверенное.

black_semargl
12.07.2016 15:43Ну там достаточно сложная зависимость, можно брать количеством низкопотребляющих ядер.
saboteur_kiev
12.07.2016 15:47-1Не все можно распарралелить.
Например задача — заархивировать файл.
Сколько бы ни было ядер, многоядерный процессор не сможет обогнать одноядерный на этом алгоритме сжатия.
Можно переписать алгоритм для распарралеливания процесса, но в этом случае уровень сжатия однозначно будет хуже.
arheops
12.07.2016 19:11+2Во первых, расспознавание образов параллелится прекрасно. Во вторых — архивация выполняется блоками(обычно от 2к до 1М) и параллелится СУПЕР просто.

force
13.07.2016 13:34+1Добавлю, что уровень сжатия всё-таки будет хуже от этого. Но это хуже настолько незначительно, что им можно пренебречь.
arheops
13.07.2016 15:44Если двухпроходное сжатие — сначала вы делаете 100500 словарей каждый на отдельном куске данных. Потом делаете анализ результата, сливаете куски которые имеют похожий словарь. Потом уже сжимаете. Хуже сжатие не будет.
saboteur_kiev
13.07.2016 16:08А что насчет последовательности данных МЕЖДУ кусками?
Потом вы говорите нужно делать многопроходное сжатие, в то время как на одном проце это все сделается за один раз.
Сжатие будет или хуже или медленнее. Просто так уж тут повелось.
Конечно другой вопрос, что «хуже» может оказаться на достаточно незначительный процент, поэтому нет смысла заморачиваться ради лишнего 1-2% объема данных. Но вопрос ведь был принципиальный.arheops
13.07.2016 16:16Не делают современные алгоритмы это за один раз. За один раз сжатие намного хуже получается. Даже классический Дефри-Халмана — двухпроходный. Последовательности между кусками нет. Есть граничные байты. Вообще чем более мелкие куски, тем лучше сжатие, но добавляются сами словари. Потому необходим этап проверки «а не получится ли лучше если вот эти 10 кусков подряд сделать одним словарем». Тоесть фактически современные универсальные методы — трехпроходные. Или эвристческие(винрар) с использованием специфических алгоритмов для разного типа файлов.
saboteur_kiev
13.07.2016 16:29Хм, я всегда считал, что чем более крупный блок анализируется, тем лучше сжатие, ведь на бОльшем блоке можно найти бОльше совпадений и создать лучший словарь?
Есть где-то ссылка, где бы детальнее показывалось как работает winrar, имеется ввиду именно работа с блоками? В стандартном faq и быстрым гуглением не вижу…force
13.07.2016 17:10Хм, я всегда считал, что чем более крупный блок анализируется, тем лучше сжатие, ведь на бОльшем блоке можно найти бОльше совпадений и создать лучший словарь?
Да, но при размере в 1Mb, уже копеечная разница получается.
Картинка по размеру блоков
saboteur_kiev
13.07.2016 17:51К вашей картинке пару замечаний:
1. gzip вообще не должен сравниваться с работой обычных архиваторов, ибо он работает с потоком а не файлами, именно поэтому gzip и ему подобные алгоритмы имеют свою специфическую среду применения
2. Откуда эта картинка? Хотелось бы уточнить на чем ее применяли, потому что если тест проходил на примере упаковки кучи .doc файлов или игрушки, у которых размер 1 файла в среднем меньше мегабайта, то понятно что блоки в 1 мегабайт максимум, что им нужно.
P.S. Я не придираюсь, я действительно хочу разобраться )force
13.07.2016 18:40Все архиваторы в конце концов работают с потоком (ну или с массивом байт). В данном случае, AdventureWorks (100 или 200 мегабайт) в потоке с флушами (могу сделать и независимыми блоками). Вообще, этот график был в своё время сделан не для демонстрации не размеров блоков, а полезности при «запоминании» предыдущего блока. Ну и для размера блока он подошёл.
Но в целом, при размерах блоков больше 64Кб — разница уже небольшая. Связано с тем, что размер «словаря» (не люблю это слово для LZ77), как раз 32-64Кб у данных архиваторов. Больший размер словаря даёт мало эффекта.saboteur_kiev
13.07.2016 19:18Не путайте работу с потоком (pipe) и файлом. Вы видимо никогда не использовали
echo «Hello World» | gzip -f > archive.gzip
учтите, что Hello World это
1) не файл
2) это поток, который для gzip не имеет ни начала ни конца, но он будет выдавать скомпрессированный output по мере получения контента.force
13.07.2016 19:24+1И? Чем это противоречит тому, что я сказал? Файл будет обработан точно также. Как поток. Хотя в реальности, данный поток или файл приведут тупо к заполнению внутреннего буфера определённой длины (32-64Кб), который будет пожат и выплюнут наружу.
Вообще, давайте прекращать эту дискуссию (или уходить в ЛС), а то совсем от темы статьи уехали. Вот я напишу статью про устройство архиваторов с примером реализации (я джва года уже хочу это сделать, но лень), и там уже знатно посрёмся и помакаем друг друга в нечистоты ;)
force
13.07.2016 17:06+2Не делают современные алгоритмы это за один раз.
Делают. Ибо это аццки быстрее. Смотрите на LZ4, Snappy, LZO, QuickLZ и прочие. Это получается практически бесплатное архивирование при хорошем результате.
Есть граничные байты.
На них, как раз и проблема. Представьте для простоты файл в миллиард нулей. Сжимается в условные 5 байт (повторить миллиард раз ноль). С блоками у вас будет — повторить размер блока ноль. В реальности, это копейки, правда.
Потому необходим этап проверки «а не получится ли лучше если вот эти 10 кусков подряд сделать одним словарем»
Или вы фигню говорите, или в вашем понимании куски являются последовательностью, а не блоками. И классического Хаффмана (Дефри-Халман — это что-то среднее из Хаффмана и Диффи-Хеллмана, т.е. вообще не по делу), никто не использует. Обычный однопроходной энтропийный алгоритм.arheops
13.07.2016 17:58Сравните «ацки быстрый lzo» с rar на реальных файлах и вы прозреете. Понятно, что lzo быстрее, но в большинстве случаев место важнее. Не, ну кого интересует файл из одних нулей. Не прикалывайтесь.
Один словарь хорошо, когда файлы одного типа(например текст на одном языке). Если тип данных меняется(а это почти всегда), множественные словари выигрывают.
У винрара множество алгоритмов с эврестическим выбором по типу файла и/или характеристикам данных. Точный алгоритм постоянно меняется.
Большинство алгоритмов винрара(кроме fastest — который lzo) двухпроходные.force
13.07.2016 18:45Сравните «ацки быстрый lzo» с rar на реальных файлах и вы прозреете. Понятно, что lzo быстрее, но в большинстве случаев место важнее. Не, ну кого интересует файл из одних нулей. Не прикалывайтесь.
Сравнивал, знаю. Двукратное улучшение сжатия и десятикратное падение скорости.
Один словарь хорошо, когда файлы одного типа(например текст на одном языке). Если тип данных меняется(а это почти всегда), множественные словари выигрывают.
Да какие там словари… нет в LZ77 словарей, там плавающее окно. И это гораздо проще, понятнее и быстрее чем словари. А это плавающее окно само подстроится под данные.
У винрара множество алгоритмов с эврестическим выбором по типу файла и/или характеристикам данных.
Кроме PPMd, там, насколько я помню, трансформирующие алгоритмы. А это всего-лишь пред.обработка перед тем же самым сжатием.
У винрара множество алгоритмов с эврестическим выбором по типу файла и/или характеристикам данных.
Ну, я вроде это и написал, LZ77 + энтропия. Но они не двухпроходные, а один поверх другого. Или вы считали подготовительные алгоритмы за проход?
saboteur_kiev
13.07.2016 19:43«Понятно, что lzo быстрее, но в большинстве случаев место важнее. „
Тут несоглашусь. При сжатии данных в 10 раз, скорость бывает важнее, чем сжатие в 11 или даже в 15 раз.
Но Winrar конечно крайне полезный, не только в плане алгоритмов но и других киллер фич.
saboteur_kiev
13.07.2016 16:07Если архивацию делать блоками, мы теряем целостность информации, следовательно словари будут выполняться либо для отдельных блоков (и сжатие внутри них гораздо хуже, чем по цельному файлу), либо такие словари не смогут найти последовательность МЕЖДУ блоками.
Итого — да, можно ускорить процесс, но качество сжатия уменьшится.
saboteur_kiev
14.07.2016 12:151. Распознавание образов к архивации отношения не имеет.
2. Если архивировать все блоками, раскидывая их по ядрам, то каким образом ядро №2 узнает, что ядро №1 уже нашло полезную последовательность? Будет ждать? А зачем тогда парралелить?
3. Если анализ выполнять блоками, то много последовательностей можно найти в блоке 2к? Предположительно, файл должен быть проанализирован целиком, чтобы найти в нем как можно больше совпадений, а если его разделить, то между блоками последовательности не будут найдены — качество пострадает.arheops
14.07.2016 12:271. Тем не менее распознавание тоже достаточно легко параллелится.
2. При архивации данные режутся на куски в соответсвии с количеством процессоров и каждый кусок отдельно архивируется. Выше приводили график, который показывает приблизительный размер куска(обычно берется 256кбайт).
3. Смотрите график.saboteur_kiev
14.07.2016 13:091. Распознавание и обязано легко парралелиться — там работа идет с одним и тем же куском кода. Как и декодирование видео, потому что кейфреймы, как и обработка видео, потому что тот же блюр можно независимо применять к разным блокам экрана.
Ставить рядом распознавание образов и архивацию — некорректно.
2. По поводу графика выше — я уже писал комментарий, что я бы хотел посмотреть контент целиком, поскольку вырванный их контента график может очень сильно отличаться. Сравните в том же winrar архивацию пачки файлов и архивацию тех же файлов, но используя опцию «непрерывный архив»
По поводу того, как именно данные режутся на куски, и архивируются отдельно — можно ссылку, где это детально расписывается, потому что я уже приводил аргументы в плане непрерывности блока, для поиска цепочек в словари.
3. про график уже сказал.
Я вижу ваши фразы, но я не вижу подкрепления этих аргументов. Я нигде не могу найти детальное описание, как работают хорошие архиваторы, типа 7zip и winrar, которые хорошо жмут. Только поверхностные фразы, которых как раз не хватает, чтобы получить подтверждение что именно и как там делится по блокам.
Vjatcheslav3345
13.07.2016 09:15А зачем обрабатывать всё подряд — можно выделять и обрабатывать только то, что потребуется сейчас или через десятую часть секунды, все прочее просто выкидывать (поток то с камер идёт непрерывно).
Скорее всего, проблема лежит не чисто в алгоритмах или железе а где то посередине. Иначе бы альфа го действительно играла бы, глядя дешевенькой веб камерой на экран ноута — альфа го проблем с лучшим железом или камерами не имела, но её разработчики не демонстрировали эффектного трюка, распознавая образ доски одновременно с игрой. Словом, как говорилось в одном сериале, «истина где то рядом».
yefrem
12.07.2016 16:16К тому же, сдается мне, для конкретной задачи вождения с головой хватило бы намного менее мощных камер при том же качестве обработки.

odissey_nemo
13.07.2016 19:43+1Газеты из космоса читали ещё в 50-х годах XX века. Но только в бульварной прессе. Сегодня тоже не научились. И теннисный мяч разглядеть в идеальных условиях не удаётся даже теоретически.
saboteur_kiev
12.07.2016 14:58+1Повторить и превзойти сами глаза можно уже давным-давно.
Адекватно обработать изображение и распознать объекты в приемлимые сроки — никак.
Pakos
13.07.2016 11:49+1Конечно не получилось — любого инженера за столь кривое поделие уволят. Если брать глаз чисто как датчик.
Wingtiger
13.07.2016 08:53вот не надо про превосходство камер перед глазами! Возьмите любой видеорегистратор кроме самого дорогого (я не могу такие сравнить) и поездите на машине вечерами/ночами. Впрочем, есть регистраторы и «ночные», вот только они днём слепые, засвечиваются.
Тут и плохая адаптация к освещённости (авторегулировка) и никакой динамический диапазон (номер ночью в свете фар)hokum13
13.07.2016 09:44А если взять достойного соперника, с соответствующими характеристиками? Вы про механизацию оптики в своем глазу не забыли? Не видел ни одного регистратора с хотя бы «телефонной» оптикой.
Хотите сравнивать глаз с камерой — возьмите какую-нибудь любительскую камеру, типа d5300 и сравните ее работу со своим глазом. Картинка четкая по всему кадру, а не только в центре, и вообще «рыбий глаз» можно прикрутить. Фокусировка чуть медленнее глаза. А диафрагма позволит работать при условиях почти любой освещенности.
Можно взять и профессиональные камеры видеонаблюдения, у них диапазон от почти полной темноты начинается, правда стоят уже дороговато.
IgorKh
13.07.2016 10:12+1Вы не поверите ездил я с регистратором и один раз даже чуть человека не сбил, вечером бабка какая-то появилась у меня прям перед машиной чудом ее объехал, потом посмотрел на регистраторе и там все было отлично видно и бабку было видно далеко на подходе. Глаза имеют свойство обманываться, концентрироваться на освещенных фарами участках и плохо при этом видят то что делается по бокам, так что не нужно тут про превосходство глаз. Конечно дешевая устаревшая матрица проиграет по всем статьям, но если увешать маг=шину этими матрицами со всех сторон, продублировать зоны ответственности, уверен такая система превзойдет обычного водителя по внимательности. По крайней мере, роботы, как известно, не устают.
alexeyborealis
12.07.2016 13:46-2> Автомобильной навигации больше двадцати лет. Но при цене системы в пару-тройку тысяч долларов она до сих пор ставится менее чем на 20% всех новых автомобилей.
Навигация в автомобиле стоит 2-3 к USD? Серьёзно?
По прайсам дилера, конечно, запросто, но себестоимость-то раз в 10-20 меньше.
Andy_Big
12.07.2016 14:13+4Конечному покупателю все системы поставляются по прайсам дилеров, себестоимость для него никакого значения не имеет :)
ssneg
12.07.2016 14:27+4Та навигация, которую пытаются навязать автопроизводители по цене в 2-3К, на поколения отстает от навигации, которая есть в любом телефоне или GPS-навигаторе за сто долларов. Поэтому ее никто и не ставит. Автопилоты же не конкурируют ни с какой подобной системой — только с кошельком пользователя.
Pakos
13.07.2016 11:56+2Навигация нафиг никому не сдалась — знать что едешь по градусам ой широты и ой долготы никому не интересно. Основная проблема — карты, если их постоянно качать из инета — нужна связь, если хранить, то нужно актуализировать регулярно, а то завезёт такая навигация к гуглу на куличики. А делают их, похоже, по остаточному принципу (как и мультимедийную начинку, всё больше на откуп десигнерам отдают). Считают, наверное, что не такое уж конкурентное преимущество (нормальная навигация по сравнению с обычной) чтобы вкладываться. По крайней мере в отношении РФ.

Bedal
12.07.2016 14:00+13На самом деле написано гуманитарное бла-бла, извините, пожалуйста.
Безусловно, настоящий расцвет автономных автомобилей наступит только тогда, когда [наконец] человеков из-за руля уберут совсем. А уж робот с роботом — договорится, при условии связи между машинами, включая координаты и скорости, движение достигнет совершенства, абсолютно недоступного белковым и даже хордовым.
Но. Пример с фурой, например, говорит о том, что и водитель НЕ увидел фуры. Автопилот работает только при наличии рук на руле, водитель никуда не уходил. В ситуации с выезжающей фурой очевидно, что у человека была УЙМА времени на реакцию, но… Так что «оба хуже» в этой ситуации.
Иллюстрации тяжёлых железок хороши были бы в сравнении с аналогичными железками десятилетней давности — чтобы можно было начать догадываться о том, что будет ещё через десять лет.
А умопомрачительные цифры мозговой обработки хорошо бы подкорректировать, учитывая, что _далеко_ не все они обрабатываются на высоком уровне, да и скорость обработки учитывая тоже.
Лидары — это тупик и рудимент. Точечные датчики, как их ни крути, не дадут реальной картины. Среди отсылок к военным можно добавить и то, что ракеты в-в с точечным наведением на цель (со сканированием, ессно) сейчас сильно уступают матричному распознаванию (то есть да, камеры и зрение). Против матричных, например, не действует сокрытие двигателей, они видят самолёт как целое, и ловушки нужны уже не точечно-яркие, а целые облака, полностью скрывающие цель.
Добавим, что использование активной локации (лидары) при массовом использовании создаст только проблемы, как уже есть проблемы у радаров ближнего радиуса в адаптивных круиз-контролях и контролях мёртвых зон, когда их на дороге много рядом.
Просто во времена, когда начинали, без костылей-лидаров вообще не получалось. В реально эксплуатируемых системах их, конечно, не будет.kaichik
12.07.2016 14:20-3Извиняю как гуманитария, приходите еще.
У пассивных систем в видимом диапазоне полно минусов — нет прямого измерения скорости, плохое разрешение по дальности, влияние погодных условий, тяжелая обработка и т.п. За приемлемые деньги ничего из этого не починить. Про военных и самолеты как единое целое давайте не будем, там дофига технологий, которые в серийное производстов и малые деньги вообще не переходят никогда.
Кстати, и проблема с помехами радаров рядом решается элементарно.

myxo
12.07.2016 15:10+2Автор просто написал свое ИМХО, я вот так и не понял почему он считает проблемы нерешаемыми.
upd. Ещё меня почему-то удивляет, что люди думают, что при внесении технологий все должно быть идеально. Нужно сравнивать автопилоты не с абстрактным идеальным водителем, а с среднестатистическим человеком.
NikKotovski
12.07.2016 17:31Водитель-то может и увидел, но у него не было предпосылок подумать, что круиз-контроль — нет. Или вы предлагаете при включенном круиз-контроле перед каждым препятствием тормозить самому? А зачем он тогда нужен?
Нет, я понимаю, что современные круиз-контроли (так называемые автопилоты) годятся только для того, чтобы у водителя руки отдыхали. Но, к сожалению, компании позиционируют их как нечто совершенно иное. Потому что иначе их никто и не будет покупать. Отсюда и проблемы растут и люди бьются.
5oclock
13.07.2016 09:52Современные круиз-контроли — для того, чтобы у водителя правая нога отдыхала.
И конечно с включённым круиз-контролем нужно тормозить перед каждым препятствием.ksil
15.07.2016 12:26есть «просто» круиз-контроль, соблюдающий определенную скорость, и активный, притормаживающий при замедлении впереди едущего автомобиля и подруливающий, чтобы оставаться в полосе.
5oclock
15.07.2016 12:51Это и есть «современный круиз-контроль». Что пассивный, что активный. Он освобождает от необходимости «держать скорость». Т.е. можно снять ногу с газа.
А всякие там line assist — это не круиз-контроль.ksil
15.07.2016 13:42одно дело, когда не надо держать газ. другое, когда в большинстве случаев и тормоз жать не надо.
5oclock
15.07.2016 13:50Собственно моя речь про круиз-контроль началась с ответа на этот абзац:
«я понимаю, что современные круиз-контроли (так называемые автопилоты) годятся только для того, чтобы у водителя руки отдыхали.»
Я поправил, что круиз-контроль руки не освобождает.
А уж притормаживает он или нет — дело десятое. Человек всё-равно это ногой делает, а не руками.
Да и в вопросах торможения перед препятствиями я бы машине не доверял и тормозил бы сам, а автоматику рассматривал бы как резерв, страховку от того случая когда водитель «зевнул».
Bedal
13.07.2016 16:17Тот, кто разбился — был большим фанатом Теслы. Похоже, слишком фанатичным…
«Автопилот» теслы, как Вы правильно пишете — на самом деле всего лишь адаптивный круиз-контроль плюс система соблюдения полосы.
Так вот, о первом: адаптивный круиз-контроль поддерживает дистанцию за впереди идущим авто, пока то авто нормально едет. Он НЕ обеспечивает экстренных торможений. Те системы экстренных торможений, что есть — всегда включают оговорку «до скорости ...» То есть на высокой скорости (а там была немалая) система экстренного торможения НЕ гарантирует безопасности. Что он и проверил.
О втором: полоса контролируется по разметке и на дорогах с отсутствующей или нестандартной разметкой чудит, что и проверил недавно ещё один тесловладелец, слетев с трассы через деревянный забор.
В общем, эти случаи — дистиллированное следствие нечестного маркетинга от Маска. А вот история, когда машину начало колбасить в полосе, так что она перевернулась — уже действительно баг системы. И, как ни странно, тут можно быть спокойным, баг всегда исправим. А вот нечестный маркетинг…NikKotovski
13.07.2016 17:18Это я и имел в виду: что «автопилот» атопилотом не является и максимум его возможностей — дать отдохнуть рукам и ногам. Но пиарится система именно как автопилот, потому что круиз конролем людей покупать не заманишь. Это приводит к дополнительным продажам и дополнительным же жертвам. Видимо сказал обо всём этом я очень коряво, раз уже двое отписались уточнить.

devlind
12.07.2016 14:17В статье написано не более чем личное мнение автора. Автопилоты уже давно способны понимать «проедут ли они между двумя машинами или нет» — иначе они бы просто не вышли на рынок. Аварии случаются всегда, так получилось, что авария с теслой была в глуши и там не было видеокамер. Можно только гадать что случилось. Пару лет назад автопилоты были фантастикой — сейчас реальность, а то что они не совершенны ещё, ну так да, бывает — новая технология. Не стоит раздувать из мухи слона из-за одного погибшего. За это время пока автор писал статью, а я свой комментарий погиб ещё целый вагон человек в авариях, но никто не делает из этого шумихи.
saboteur_kiev
12.07.2016 15:03+1«Проедут ли они между двумя машинами или нет» — иначе они бы просто не вышли на рынок»
В оригинале «заранее понять», и тут же уточнялось «динамический коридор».
Если я хочу перестроиться в другую где едет две машины, я легко могу просчитать как я могу между встроиться, и насколько аггрессивно мне нужно это делать, либо заметить, что меня «не пропускают» и отказаться от намерения, не допустив аварии.
Автопилот с пассивными датчиками это не рассчитает. Это было бы можно только при общении машин друг с другом — тогда они могли бы это делать даже лучше живых водителей.
myxo
12.07.2016 15:13«Автопилот с пассивными датчиками это не рассчитает.» — почему?
saboteur_kiev
12.07.2016 15:44+1Потому что достаточного пространства там может не быть.
Потому что достаточное пространство там может быть, но слишком мало, чтобы влезла машина с достаточной безопасной дистанцией для окружающих, а делать пилот аггрессивным, чтобы он мог «попроситься» и адекватно обнаружить, что его пропустили — пока нельзя сделать надежным.
То есть он работает со статическими данными — положение объектов и их текущее направление и скорость.
Динамики и предсказания — нет.
Например «вот этот автомобиль вроде бы пытается перестроиться, а вот тот виляет, словно там права только вчера получили, надо бы его объехать подальше».
Далеко впереди вроде пробка, пора тормозить.
На двойной осевой стоит напуганная собака и непонятно или она сейчас со всех сил рванет на мою сторону или на противоположную.
Пассивные датчики вот это все смогут обработать только при достижении интеллекта примерно равного человеческому.
Но можно пойти другим путем — оборудовать дорогу, чтобы все разметки, дорожные знаки и переходы были известны заранее, сигнал светофора воспринимался не на камеру, а по сети, заранее, ограждение дороги, чтобы не было желающих пересекать ее где угодно.
Оборудовать все автомобили, чтобы они сообщали друг другу положение и намерение, и тогда вообще не нужно будет смотреть где эта фура — о том, что она там есть и собирается поворачивать будет знать и автопилот едущего автомобиля, да и сама фура будет про него знать и не полезет вперед.
Этот вариант — стоит много денег в инфраструктуру, но с точки зрения технической реализации — он уже доступен и гораздо более надежен, и расходы на него даже можно просчитать.
А вот создание ИИ достаточного уровня для полного автопилота — ни по времени, ни по средствам, ни по реализации, достаточной для установки в автомобиль — сейчас оценить даже примерно не выходит.
lingvo
12.07.2016 16:58По поводу оборудования дороги — факт в том, что автомагистрали в Европе на 90% уже отвечают вашим условиям. Светофоров там нет, как класса, пешеходных переходов тоже. Появление неожиданных животных или людей почти исключено, а если появляются, об этом кричат на всех частотах по радио. Фуры тоже неожиданно не поворачивают. Самое опасное, как оказывается — летуны под 250 км/ч на немецких автобанах. Но их уже тоже потихоньку прищучивают.
kaichik
12.07.2016 17:03+2Да ладно уж. Перестроиться перед машиной, которая идет 200 — да легко, это не фуры делают а легковые.
Ремонт дороги встречается.
Торможения в пол, когда выходишь в хвост пробке из-за холма, тоже не редкость.
Вы же не 8 часов по одному и тому же бану в левой полосе двигаетесь, а съезжаете-заезжаете на них, это перестроения и все такое прочее.
А теперь все то же самое нужно отработать ночью, в дождь или в туман. Ой, не работает.
Pakos
13.07.2016 12:03>> делать пилот аггрессивным, чтобы он мог «попроситься» и адекватно обнаружить
Может, просто не стояло задачи делать автопилот шарахающимся между рядами «гонсчиком». Если он не влезает — не стоит лезть, потому как зачем мне уступать такому? Почему он, выбрав не ту полосу, должен ехать быстрее за мой счёт? Это непедагогично — нехай в следующий раз попытается голову заранее включить.
kaichik
12.07.2016 15:14+1Все верно. Пассивные датчики хуже всего, радары — лучше (потому что есть прямое измерение скорости), но нужен V2V или некий базовый сценарий поведения автопилота, что ли.
Говоря о динамическом корридоре, я имел в виду и другие ситуации: например, автомобиль двигается по левому ряду автобана. Перед ним резко перестраиваются. Варианта два, тормозить и бить, либо уйти налево между автомобилем и отбойником.
Так вот автопилоту пока очень сложно понять, влезет он в такое пространство или нет.
tersuren
12.07.2016 15:57+5Давайте я вам скажу из окна такой машины, так сказать :) Проблемы с датчиками, что вы описываете, давно решены. По факту уже сегодня автопилот ездит лучше среднестатистического водителя. Действительно, в некоторых экзотических ситуация у автопилота будет меньше шансов чем у человека. Однако во-первых автопилот в среднем куда реже в таких ситуациях окажется, а во-вторых он взамен автопилот не попадет в огромное число аварий, в которые попадает человек потому что отвлекся. Проблема сегодня в юридической плоскости и в косности. Вот скажем натянул кто-то трос поперек дороги. Вася врезался в него, трос превратил машину в кабриолет, а Васю во всадника без головы. Закон говорит что виноват автор троса. Но вот если вместо Васи за рулем был автопилот и он врезался в этот трос обезглавив Васю, то ситуция становится гораздо менее очевидной. Авария Теслы со смертью владельца совершенно простая: голубую фуру не фоне голубого неба было видно плохо для камер. А датчики находящиеся на уровне бампера прошли под брюхом у трейлера. Собственнно случай, когда выезжающая тесла упечаталась на минимальной скорости в хвост другого трейлера, был такого же происхождения. Просто нужна еще одна кучка датчиков, повыше бампера.
А вот с юридической стороной все куда хуже. К примеру Тесла пракрасно распознает знаки ограничения скорости и слушается их. Но вот светофоры она якобы не распознает. На самом деле распознает, но специально не введена такая функция. Ибо если в один прекрасный день она таки кому-то в бок въедет или ей. И несмотря на то, что робот сделает это статистикчески намного реже, но Тесле сделают все мозги, а человекам нет. Вот тот убившийся в Тесле. Государство открывает расследование, будет смотреть, изучать. В тот же день еще 100 живых водителей впечатались во что-то и самовыпилились совершенно без оснований. Но так как это примвычно, то никто не открывает расследование по устройству глаз и рук и не выясняет: а может ли биологический механизм водить безопасно? Понимаете, если бы каждую обычную аварию превращали в такой же геморой для производителя машин и для всех водителей, то автопилоты были бы на улицах уже завтра. а вот люди — увы :)

GloooM
12.07.2016 17:50Кстати, а что за датчики стоят в самой тесле? Там ведь лидара нету? Только радар как в обычном адаптивном круизе и плюс камеры?
kaichik
12.07.2016 18:12-1У Теслы железо меняется, не скажу что стоит прямо сейчас. Макс декларирует подход «камеры+радары». Сейчас кмк есть фронтальный радар, ультразвук по кругу и камеры.
GloooM
12.07.2016 18:39Вспоминая как работает радар адаптивного круиза у меня на форд фокусе, если в воздухе висят мелкие брызги воды то он практически бесполезен — чуть дальше дистанция и он не видит машину и считает что дорога пуста, а потом пишет что радар временно заблокирован и предлагает давить педали самому.
Принцип надо полагать что мелкая взвесь воды поглощает испускаемые радиоволны и в радар не возвращается ничего.
Интересно в новом поколении радаров как-то этот момент решат или же автопилот сугубо для идеальных условий, что тоже жирный минус если живешь не в солнечной Калифорнии, а в суровой России )))kaichik
12.07.2016 18:56В целом да, взвесь не способствует работе радара, но современные устройства только снижают дальность)
LittleSquirrel
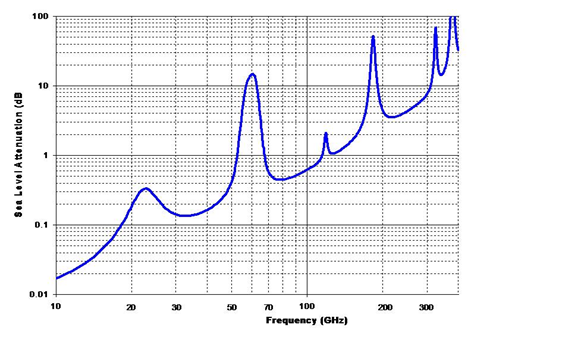
13.07.2016 00:41Радары с разной частотой есть, у более высокочастотных с этим получше. Они пока и дороже, правда.
kaichik
13.07.2016 13:50Вот на этот счет картинка с хабра, строго говоря с уменьшением длины волны затухание увеличивается, но это компенсируется другими плюшками.

Arceny
12.07.2016 14:20+1> Автомобильной навигации больше двадцати лет. Но при цене системы в пару-тройку тысяч долларов она до сих пор ставится менее чем на 20% всех новых автомобилей
Это просто зажравшиеся автопроизводители ломят цены. Реально же цена китайского навигатора или смартфона с GPS — от $50.kaichik
12.07.2016 14:41Воу, вы рано остановились, сама микросхема ГЛОНАСС/GPS вообще 5 баксов стоит, китайцы на ней делают 10 концов, а автопроизводители — 100!
На самом деле, конечно, нет.
Навигация в автомобиле — это как компьютер с монитором, причем в automotive-исполнении, у него техтребования чуть строже, чем у китайского смарта.
Навигация в автомобиле включает картографию. Не задумывались сколько это стоит? Автопроизводители задумались, но они тупые и им пришлось купить Nokia HERE за 2,8 ярда евро.
Ну и интеграция даже лампочки в автомобиль включает в себя очень большой объем документации, которая увеличивает полную стоимость решения. Навигация сложнее лампочки.Arceny
12.07.2016 14:46Есть openstreetmap которого хватает и который как правило лучше встроенных карт. Есть всякие другие платные решения за 2-3 тысячи рублей. Есть онлайн карты от гугла, которые в большинстве стран работают.
Остается только физическое исполнение, но как по мне так планшет или телефон перед глазами на кронштейне удобнее расположенного в панели монитора. И функциональнее точно.saboteur_kiev
12.07.2016 15:31И который есть только в крупных городах, а за городом он отсутствует практически полностью, разве что у вас по соседству на даче живет гик.
google maps гораздо хуже яндекс в странах СНГ, особенно при прокладывании маршрутов.Arceny
12.07.2016 15:48Который есть практически везде, а в таких странах как Беларусь так вообще уделывает все коммерческие карты. Бесплатный яндекс кстати тоже никто использовать не запрещает, но у меня есть нарекания по качеству карт яндекса в моём регионе.
quadrat137
13.07.2016 14:20OSM отсутствует за городом?
У меня ни разу такого опыта не было, более того, openstreetmap знает множество грунтовок и объездов, которых нет вообще ни на каких картах
Броды, объезды через лес, сельхоз дороги вдоль полей и насыпанные строителями грунтовки — больше информации нет на всех остальных картах, взятых вместе(использовал Навител, Гугл, Яндекс, генштабовку)ploop
13.07.2016 15:02OSM отсутствует за городом?
Практически да, если это мелкий провинциальный город. Хотя согласен — получше других, мелких деталей побольше.
tmin10
12.07.2016 17:17Картография стоит не так уж и дорого, вон лицензия на навител стоит 1000 рублей для региона, с навигаторами бесплатно поставляется.

dobrobelko
12.07.2016 18:23+2А производители авионики совсем стыд потеряли — от $10k за простейший GPS :) Обычно считающим так я рекомендую сначала узнать что такое RAIM и WAAS, а потом попробовать оценить требования к надежности этих устройств.
ShabanovYT
12.07.2016 14:20-4В статье даются категоричные прогнозы на 15 и 25 лет. Раз уж пошла такая петрушка, вот прогноз на 10 лет:
Автопилот — только на выделенных автобанах, соединяющих крупные города. Принцип работы автопилота будет немного другой. ВСЕ автомобили оснащаются системой позиционирования. Она сообщает системе положение, направление движения, скорость, тип автомобиля ( длина фуры, например, может быть больше 10 метров, это важно). В системе создается виртуальный образ всей картины и именно ей руководствуется автопилот.
… На самом автомобиле только датчики. которые сигнализируют о внезапном появлении препятствия, лось какой-нить или ханыга перебегает дорогу, спеша попасть в ближайший торгсин.
В случае неадекватного поведения автомобиля. система выводит его на обочину, глушит двигатель и вызывает эцелопов.
— Для Роисси все это особого значения не имеет. Сейчас важнее сделать разделительные полосы НА ВСЕХ ДОРОГАХ, а лучше 2 разделительных полосы с небольшим забором из колючей проволоки между ними толщиной хотя бы сантиметр.

lasalas
12.07.2016 14:32+2Ну конечно. «Автомобиль лишь модная игрушка, а вот лошадь — она навсегда, голубушка!». И аргументация примерно аналогичная была.

SinsI
12.07.2016 14:40Первый и третий пункты — вообще не аргументы. Сколько сейчас выпускается лидаров в мире? Сотня в год?
При сколько-нибудь массовом производстве ситуация с ценой, доступностью и количеством установленых датчиков радикально улучшится — ибо ничего такого особенного и ценного в них нет, всё совершенно обычные матрицы, лазеры и микрочипы.
Второй пункт тоже не шибко силён — тот же «принцип Парето» действителен и для людей.
Достаточно того, чтобы ущерб от аварий у автопилотов был ниже, чем у водителей-людей, и это уже будет поводом массово их внедрять, а к оставшимся водителям — увеличивать требования.LittleSquirrel
12.07.2016 14:54+2Проблема с обьемами и стомостью произдводства текущих лидаров в том, что они не сильно то и приспособлены для массового производства и массовой установки. Т.е. при серии в сотни тысяч цена такой Велодайн конечно упадет с 70к, но не до уровня приемлемого для массового рынка.
Syzygy
12.07.2016 18:44Да нет никаких проблем. Вспомните, какие функции были у телефонов 15 лет назад и какие сейчас. Тогда за те возможности, которыми мы обладаем сейчас, пришлось бы отдать несколько десятков тысяч долларов, если не сотен.
LittleSquirrel
13.07.2016 00:18Я бы не стал сравнивать лидар с телефоном, в телефонах оптику решать не приходится. Для иллюстрации: посмотрите на стоимость хороших обьективов для зеркалок 30 лет назад, посмотрите на стоимость сегодняшних, сравните разницу в функционале.
arheops
12.07.2016 19:25Сравните с пикопроекторами. От которых лидары почти не отличаются.
kaichik
12.07.2016 19:44Сравните лучше вы, я думаю всем будет интересно.
Потому что за последние 10 лет на рынке лидаров изменилось почти ничто. Увы :(arheops
12.07.2016 19:51Ну так до этого на рынке пикопроекторов 30 лет ничего не менялося(их и не было вобщемто). Лидра состоит из лазера(полупроводниковые лазеру уже есть, достаточно дешевые), системы отклонения луча, приемника. Пикопроектор — из светодиода, системы отклонения луча(одна из схем). Во всех компонентах есть куда двигаться к удешевлению. Ультразвуковые датчики положения(те, что на Тесле сейчас) еще 10 лет назад стоили как сейчас лидары сейчас, и не дешевели. Будет выпуск массовый, будет удешевление. Если что, я про лазерные пикопроекторы с системой отклонения луча как вот тут http://www.thg.ru/technews/20140221_143541.html
LittleSquirrel
13.07.2016 00:27+1Хорошие лидары, к сожалению, очень чувствительны к качеству оптики, ее монтажа, калибрации и точности этих самых «механизмов отклонения луча». Производить быстро и дешево с нужной точностью не выходит, там допуски совершенно не серийные. А при попытке упростить и удешивить, материалами ли или производственным процессом, резко падает производительность. И из супер-сенсора, который «видит» на 250-300 метров с точностью меньше сантиметра мы получаем нечто, стабильно работающее на 50-70 метрах.
Я просто уже два года наблюдаю попытки немаленькой команды индустриализовать один такой лидар и пока кроме бесконечных матов и перенесенных сроков начала серийного производства ничего хорошего не слышал.
На мой взгляд лидары с подвижными частями, от Velodine ли, от Sick или Ibeo, не имеют серийного будущего. А высокопроизводительные лидары без движущихся частей обещают не раньше, чем через 3-4 года.kaichik
13.07.2016 13:51Все точно. Сейчас Штаты рвет идея solid-state лидара за 250 баксов, но не очень понятно что это будет.
lasalas
12.07.2016 14:48+3Чтобы управлять автомобилем вовсе не нужно эмулировать человеческий разум у чувства. Та же стрекоза великолепно перехватывает мух, ориентируясь в трехмерном (!) пространстве с помощью достаточно простых фасеточных глаз.
saboteur_kiev
12.07.2016 14:54Можно пойти путем рельсового транспорта.

General_Failure
12.07.2016 20:27Это конечно круто, но к рельсам везде требования одинаковые
Где-нибудь в глуши не продолжить рельсы-грунтовку, как с обычной дорогой
Даже щебень не спасёт
А для городского транспорта — да, проще некуда
Правда город проще с нуля построить чем в существующем дороги на рельсы менять
Хотя китайцы так и делают — строят пустые города с нуля, правда пока с обычными дорогамиsaboteur_kiev
13.07.2016 16:14Рельсы гораздо дешевле асфальта, особенно в долгой перспективе — поскольку нагрузка на рельсы может быть гораздо выше, и срок службы гораздо дольше. То есть провезти груз и пассажиров по рельсам будет быстрее, безопаснее и дешевле. Количество перевозимого за раз — тоже больше.
Другой вопрос, что рельсы не очень универсальны, и рельсовый транспорт не сможет свернуть с главного пути и поехать прямо под подъезд или под задний вход для склада.General_Failure
13.07.2016 16:29Если автомобильную дорогу прокладывать по всем стандартам (да даже если делать вид, как у нас в России), то да
Но у автодорог есть бюджетный вариант (просто щебень) или совсем нищебродский, зато быстрый (грунтовка)
Можно ещё быстро плит накидать (не знаю, дороже щебня или нет — тут цены надо сравнивать на материал и на работу), обычно для грузовиков и другой тяжёлой техники кладут чтоб они могли до какой-нибудь стройки доехать
А вот в случае рельсов так сэкономить не получится
Ну можно деревянные шпалы вместо бетонных, можно рельсы ржавые б/у найти, но кардинальной экономии всё равно не получится — даже бесплатный материал с помойки надо везти и аккуратно укладывать и крепить
Поэтому вряд ли когда-нибудь жители деревень типа Глухоперди или Малого Зажопья ездить в райцентр по рельсам
А в остальном согласен и даже мечтаю своими глазами увидеть такой город, где весь транспорт автоматический и на рельсах :)saboteur_kiev
13.07.2016 17:55Дорога в глуши и дорога в глушь — разные вещи.
в Глухопердь вообще нет смысла строить дорогу — если там 2.5 дома, она никогда не окупится.
Но если есть какие-то грузовики и какая-то стройка, что туда нужно возить много тяжелой техники, то уже имеет смысл посчитать рельсы.General_Failure
13.07.2016 18:21Дорога в глуши
Вы наверное имеете в виду «Дорога через глушь» — тут да, полностью согласен
Если где-то ведётся большая стройка, лучше сразу рельсы проложить
Потому что если что-то строится что-то капитальное, то скорей всего это будет использоваться долго — туда и оттуда постоянно придётся возить людей и грузы
А если рельсы положить — хорошая дорога уже готова :)
Причём не грунтовка и даже не плиты, которые грузовики за время строительства успели переломать и втопить в глину
в Глухопердь вообще нет смысла строить дорогу — если там 2.5 дома, она никогда не окупится.
Да, никогда не окупится
Поэтому так и будут кататься по бесплатной грунтовке, которую сами же и раскатали среди поля
Ни щебня, ни тем более асфальта они никогда не увидят, ну и рельсов, соответственно тоже
Но по грунтовке на машинах ездить можно, хоть и далеко не на всех
gsaw
12.07.2016 15:02+9Помойму закон Парето не говорит о том, что в 20 процентах случаев машина попадет в аварию. Закон Парето говорит, что минимальными усилиями можно создать более менее работающий прототип, что по мойму получилось к примеру у Геохота или у Теслы. А что бы довести до ума требуются много больше усилий. И для этого надо работать всем. И производителям, и общественности и правительствам. Так что все решаемо, было бы желание.

Garruz
12.07.2016 15:02+2В статье, конечно, правильно очерчен круг основных проблем…
Но рассматриваются лишь некие «сферические» идеальные автопилоты, способные в автономном режиме не только полностью заменить, но и превзойти человека в совершенно любых ситуациях.
До такого, конечно, ещё очень далеко, если это вообще не утопия – ведь и сам человек (не только среднестатистический водитель, но даже профи) далеко не идеален и не способен справиться со 100% всех ситуаций.
Автор упустил важнейший, на мой взгляд, момент – с развитием V2V+V2I имеющиеся проблемы внедрения автопилотов снизятся на порядок. Как минимум, сначала в крупных городах, потом в городах поменьше, потом почти везде.
Скорее всего (не вангую, но вполне допускаю) – в какой-то момент внедрение этих систем и инфраструктуры будет даже активно форсироваться путём законодательств (как в своё время происходило с теми же экологическими стандартами).
Поскольку эти технологии позволят с лихвой компенсировать несовершенство датчиков, а в подавляющем большинстве случаев даже «неуниверсальность». Ведь в сложных ситуациях робот с роботом «договорятся» друг с другом за доли секунды, после чего за те же доли секунды отреагируют и решат проблему по наиболее оптимальному сценарию – это куда быстрее, чем белковые водители.
ИМХО, ведь наибольший риск для автопилота представляют не столько его «слепота» или «глупость», сколько непредвиденные действия белковых водителей. Впрочем, это утверждение справедливо и для самих белковых водителей… =)kaichik
12.07.2016 15:09Насчет влияния V2I — правильно, оно будет ощутимым и упростит движение. Но если говорить о практике, инфраструктура очень сильно отстает от развития автомобилей. И строить ее долго.
Один из главных экономических плюсов автопилота — готовая инфраструктура, которую можно использовать. Чем больше нужно вложить в дороги, тем хуже.0serg
12.07.2016 15:32С инфраструктурой не так однозначно. Например на все машины сегодня вешаются номерные знаки. Нет никаких технических препятствий к тому чтобы заменить эти знаки активными радиометками схожими по принципу работы с самолетными транспондерами. Это даст отличное распознавание других автомобилей на дорогах, причем саму дорогу трогать для этого нужно не будет.
saboteur_kiev
12.07.2016 15:49+2Хм. активная радиометка в толпе машин?
А триангуляцию как делать?
А если машина боком, а рядом куча других машин и сигнал отражается?
Радиометки не спасут никак, тут нужно не меньше, чем передача своих метрик (положение, направление, скорость движения)0serg
12.07.2016 18:01По радиометке можно определить
1) расстояние до метки (по задержке возврата сигнала)
2) скорость сближения (по допплеровскому сдвигу)
Изменяя диаграмму направленности антенны можно так же измерить
3) направление на метку
Триангуляцию делать не требуется. По этому принципу работает вторичная радиолокация в авиации. С современной электроникой подобный вторичный радар можно сделать очень дешевым.kaichik
12.07.2016 18:14Так у вас просто радар получился, еще и сканирующий. Какие же это метки?
0serg
12.07.2016 18:18Ответчики — «метки» просто откликаются на принятый сигнал, радар нужен только чтобы эти метки видеть.
А в остальном да, радар и есть. На реальных машинах сегодня радар (в числе прочих датчиков) собственно и ставят, причем первичный. Переход к меткам и вторичной радиолокации резко увеличит точность подобных систем, помехозащищенность и снизит их стоимость.kaichik
12.07.2016 18:24А есть какие-то материалы на этот счет? Не встречал такого подхода, если честно.
LittleSquirrel
13.07.2016 00:48А как быть с декларируемым целью местоположением? Каждому автомобилю тогда нужно будет выдавать в эфир свое месторасположение, в абсолютных координатах. Получить такое можно либо спутниковой навигацией либо автомобильной версией инерционной. И та и другая будут давать ошибки, особенно в плотной городской застройке.
В добавок не понятно кто ответственнен за столконовение в случае ошибочных координат: выдавший кривые координаты в эфир или таки руководствовавшийся ими.Garruz
13.07.2016 01:12По собственному опыту – тот же GPS на улице ошибается максимум на 3-4 метра. Но для любой уважающей себя бортовой системы это расстояние уже является триггером для подачи предупреждающего сигнала как минимум (если, конечно, помнить про безопасную дистанцию по ПДД).
По поводу же реальных координат другого ТС в целом – на дальних расстояниях ориентация по GPS, на ближних расстояниях ориентация по бортовым датчикам.LittleSquirrel
13.07.2016 01:283-4 метра это разница в одну полосу в поперечном направлении движения и разница между корректной остановкой и неплохим ударом для системы экстренного торможения. Не так уж и мало. А в условиях небоскребов вокруг или туннеля будет еще хуже.
Если бортовые датчики есть, то, по соображениям безопасности, им все равно работать постоянно. И шум они тот самый будут постоянно создавать и надеяться на них придется же. Такие метки помогут в первоначальной оценке позиции обьектов вокруг, но точно не заменят хорошего набора бортовых сенсоров обьедененных через sensor fusion.Garruz
13.07.2016 01:35Разумеется, V2V не будет работать в отрыве от бортовых систем. Дистанция в 3-4 метра в любом направлении – уже задача именно для бортовых датчиков (которые уже сегодня на таких дистанциях работают более чем удовлетворительно).
P.S. И, да – я не про метки, а конкретно про активные V2V-системы. Просто обратил внимание на ваше замечание о позиционировании (которое касается и V2V, в том числе).dimm_ddr
13.07.2016 13:523-4 метра это в среднем. А какие пиковые ошибки? Я не сильно удивлюсь если, допустим, раз в день на несколько секунд современные GPS могут и на десяток-другой ошибиться. Просто у пользователей этих систем сейчас нет задачи следить каждую секунду за ним, а вот у автопилотов — будет.
Garruz
13.07.2016 14:45Насчёт пиковых не знаю (это ж надо целый день следить)), но навигатор работает достаточно стабильно, не скачет.
Кроме того, «на западах» есть наземные сети коррекции GPS – повышают точность до 1 метра. Одна такая станция, насколько помню, может покрыть сразу целый город. Японцы через два года так вообще обещают запустить систему наземной коррекции с точностью до 5 сантиметров…
Одним словом – проблема не настолько критична и вполне решаема, на мой взгляд.
Кстати, сейчас подумалось…
Ведь параллельно GPS и сами TC могут постоянно «стабилизировать» друг друга с помощью уже собственных бортовых датчиков – этакая постоянная взаимная триангуляции с соседями по потоку и отдача данных в общую «карту» движения.LittleSquirrel
14.07.2016 13:53Если вы о DGPS как системе дифференциальной коррекции то она дает точность намного выше метра, порядка пары сантиметров. Проблема такой системы в необходимости дополнительной (и совсем не дешевой) инфраструктуры и ее установки. По ощущениям одна станция, при сохранении выше оговореной точности, едва покрывает 2 кв.км. пространства без застройки, стоимость при это очень неслабая. Полное покрытие станциями DGPS по стоимости будет как минимум соответствовать стоимости развертывания мобильной сети. И это все равно не устранит задержек в передаче сигнала.
На мой взгляд V2V и V2I системы нужны и полезны, но либо как поставщики вторичной информации(классификация, размеры, «планы на будущее») либо на б0льших дистанциях. Я бы оценил нижнюю границу применимости первичной информации(координаты/расстояние между) от таких систем в 20-30 метров в городе и 70-100 для «ограниченных»(120-130) магистралей.Garruz
14.07.2016 14:29Нет, я не о DGPS – это действительно «роскошь» для массового покрытия (по крайней мере, в данный момент). Для обсуждаемых нами задач пока особо и не требуется такая высокая точность.
Речь о более «грубых» системах, вроде WAAS или EGNOS, у которых радиус действия каждой подстанции – 50-200 км. Одна подстанция в состоянии покрыть даже крупный город.
Что касается границ применимости V2V (V2I пока не рассматриваем, как тоже «роскошь)) – тут смотря для чего их использовать.
Если по прямому назначению, то границы действительно примерно такие. А если для „вспомогательных“ задач (вроде описанной мной в прошлом посте), то надо смотреть конкретно по каждой задаче.LittleSquirrel
14.07.2016 15:09Для меня абсоютная ценность V2V именно во вторичной информации. При наличии точной классификации и размеров и приблизительного положения станет намного проще правильно интерпретировать показания бортовых сенсоров. Например полностью отпадет случай приведший к столь всколыхнувшей всех аварией Теслы.
С другой стороны я пока не вижу возможности обойтись без сенсоров вообще, переднюю полусферу все равно нужно покрывать хотя б на 150 метров, заднюю — хотя б на 30-40.Garruz
14.07.2016 16:22Да, несомненно, V2V в отрыве от бортовых сенсоров – не панацея. Но вот работая с ними в единой связке – очень сильно компенсирует большинство недостатков современных датчиков, особенно на дальних дистанциях (а в чём-то даже и на ближних).
В общем-то, «продвигаю» именно эту мысль – в виде возражения тезису автора статьи о том, что несовершенство датчиков якобы является «фатальным» препятствием к внедрению автопилотов.
Поэтому, на мой взгляд, развитие и активное внедрение именно этих систем станет ярким «зелёным светом» для распространения автопилотов уже в самом ближайшем будущем (тем более, что и автомобилям с белковыми водителями эти системы будут крайне полезны).
А там уж дальше подтянется и качество сенсоров, да и V2I будет постепенно разрастаться.
ИМХО, в любом случае нужен первый шаг. Иначе прогресс в этом перспективнейшем направлении так и будет топтаться на месте – скептикам всегда будет «не хватать» то одного, то другого…kaichik
14.07.2016 20:34Автор статьи полагает, что в споре рождается истина :). V2V — хорошая идея и компенсирует часть проблем датчиков. Если машина говорит другой машине, что едет впереди с известной скоростью, ее не обязательно видеть за 300 метров, достаточно метров за 30.
Но и проблемы растут в геометрической прогрессии. А что если на дороге препятствие без метки (обесточенная машина или пусть лось). А если канал связи заглушен? Если данные с внутренней системы (радара) противоречат данным от V2V, что делать? Очевидно, «своя» информация является доверенной и она важнее.
Я попробую поднять эти темы в рамках отдельного текста, с V2I/V2V к сожалению не все очевидно. Соглашусь с позицией LittleSquirrel, от датчиков на машинах никуда не деться и не факт, что информация от других машин серьезно поможет.LittleSquirrel
14.07.2016 21:06Положим видеть впереди идущую цель на 300 метров нужно только для одной страны на этом шарике(остальные мелочи не в счет), для остальных хватит и половины. Но вот 30 метров это нереально мало, автоторможение со 120км/ч не успеет убрать скорость и в половину. В таком случае V2V механизм(HW, софт и сам канал передачи) придется делать хорошо если «всего лишь» ASIL C compliant, с защитой канала и кросс-чеками. Я даже представлять себе не хочу обьема работ по такой системе.
Потому, как минимум в силу сертификационных требований и functional safety, V2V сможет быть поставщиком только дополнительной инофрмации.Garruz
14.07.2016 21:29ЕМНИП, продвигаемый на звание «основного V2V-протокола» DSRC – до 150 метров.
P.S. За городом якобы аж до 500-600 метров, но документальных подтверждений этим заявлениям тестеров не нашёл, поэтому врать не буду…
Garruz
14.07.2016 21:16Ох, честно говоря, я тут про эту «синергию» уже столько всего понаписал (одна из любимых тем, каюсь)), что даже не знаю, на какой именно из постов давать ссылку.
Поэтому попробую вкратце «резюмировать» свою позицию…
Я же не призываю вообще отказываться от бортовых сенсоров. Полностью согласен с тем, что они необходимы в любом случае.
А говорю лишь о том, что их нынешние недостатки (которые проявляются чаще всего именно на дальних дистанциях и скрытых препятствиях, вроде другой машины за углом/горкой) во многом можно компенсировать с помощью V2V-систем.
С большинством же остальных задач на ближних дистанциях нынешние сенсоры уже справляются достаточно неплохо. Но, да – до «совершенства» (буде таковое вообще имеется)) им ещё расти и расти, разумеется.
P.S. Кстати, обесточенные машины не проблема. Всегда можно сделать отдельный источник питания для пассивного маячка с заранее прошитыми основными параметрами ТС (грубо говоря, что-то вроде нынешней батарейки для BIOS).LittleSquirrel
14.07.2016 21:23Я думаю мы вполне понимаем позицию, просто пытаемся описать в чем именно V2V может помочь и в каких пределах.
И, кстати, на ближних дистанциях у сенсоров темных пятен хватает. Тот же подъезд под трейлер выполняется как раз на близкой/средней дистанции(при ослепленной или не определяющей грузовик сбоку камере), как раз на 150-200 метрах лидар, за счет вертикального раскрытия, такой грузовик увидит.Garruz
14.07.2016 22:35Если рассматривать конкретно тот трагический инцидент с Теслой (вы ведь о нём?) – вот смотрите…
Во-первых, как вы сам же верно заметили в статье – лидар лидару рознь и «не все лидары одинаково полезны». Круче лидар – выше цена.
Во-вторых, лидар сам по себе достаточно нестабильное и капризное устройство, особенно в плохих погодных условиях (тут он сможет увидеть препятствие лишь «в лоб», т.е. на достаточно близкой дистанции).
То же самое (даже хуже) и с камерами, в общем-то. Типичные недостатки «глазков» нам всем давно известны хоть по тем же смартфонам или дешёвым «мыльницам».
Засунуть в авто хороший объектив видится малореализуемой затеей. Но даже если умудриться, то он не даст полной гарантии. Да и в ночных условиях будет вести себя ненамного лучше пресловутых «глазков».
С радарами лучше. Но какой мощности радар можно установить на авто? Тут, как и с лидарами – вопрос цены. И энергопотребления.
И только при наличии V2V у обоих ТС – весь тот инцидент разрешился бы с лёгкостью и в совершенно любых условиях.
Резюмируя:
Конкретно в данном инциденте – V2V выполняет роль дальнего обнаружения, бортовые системы в соответствии с полученными данными координируют «докручивание» манёвра уже на месте. Все живы, все довольны.
P.S. Второй, более мирный и комический, случай с заездом под длинномерный груз – решается либо установкой над лобовым стеклом дополнительной камеры, либо установкой направленного диагонально вверх лидара (ХЗ уж как, пусть думают)).
Но искренне надеюсь, что оба этих урока пойдут тесловцам (и не только им) на пользу.LittleSquirrel
14.07.2016 23:18Вот я и пытаюсь обьяснить что с моей колокольни от V2V нужна в первую очередь классификация и «официальные размеры» цели, а совсем не «система дальнего обнаружения».
>Во-вторых, лидар сам по себе достаточно нестабильное и капризное устройство, особенно в плохих погодных условиях (тут он сможет увидеть препятствие лишь «в лоб», т.е. на достаточно близкой дистанции).
Если мы говорим о хороших лидарах, то ненастолько уж они капризные. И трейлер они вполне увидят сбоку на достаточно большом расстоянии. Там проблема немного в другом:
При приближении к перекрестку()и выезде трейлера на него) лидар в бампере начинает видеть трейлер как два независимых обьекта — тягач и заднюю тележку. Если в этот момент данные не подкреплены камерой — система начинает считать что перед нами две цели. В добавок начинаются проблемы с определением направления вектора скорости обоих обьектов. В результате большинство алгоритмов попытаются уложиться между целями, получив известный результат.
При правильной классификации обьекта как «трейлер» и наличия корректного размера алгоритм не «расцепит» тягач и заднюю тележку, соответственно пойдет торможение. Но на данных одного лидара очень сложно сделать правильную классификацию и получается она очень приблизительной, размер, наблюдая один угол, тоже оценить сложно. Тут бы V2V пригодилась сильно, дав приблизительное(те самые 3-4 метра) месторасположение цели и ее точные размеры и тип.
У радара проблема совсем не с мощностью, там сложно шум убрать и стабильный обьект получить, по крайне мере по моему опыту.
Данную ситуацию вполне бы решил Велодайн на крыше, у него, ЕМНИП, 15 градусов вертикальное раскрытие. Но неэстетично, дорого и вообще…Garruz
15.07.2016 00:05Классификация, габариты, текущая ориентация в пространстве и скорость объекта – это само собой, «по умолчанию», так сказать…
Но и расстояние (расположение всех ближайших объектов на «общей карте») тоже крайне важно. Ранее я уже приводил пример с другим ТС за углом или за крутым поворотом, к примеру. Тут любые бортовые системы будут совершенно беспомощны – без V2V-коммуникации им придётся избегать столкновения лишь в самый последний момент, уже по факту обнаружения несущегося слева-справа или даже навстречу другого автомобиля…
Да и в том случае с Теслой многие грешат на вертикальный изгиб дороги недалеко от места ДТП (изгиб таки есть, правда спорный) – что также говорит в пользу дальнего обнаружения именно в виде V2V, а не «линейно-видящих» бортовых сенсоров.
Касаемо лидаров – да, есть хорошие, есть даже очень хорошие. Но и «хорошесть» их цены при этом растёт по экспоненте (Velodyne в том числе). То же самое и про радары, в общем-то.
А конкретно про фуры (и прочие составные ТС) – тут всего лишь требуется оборудовать любые отдельно движущиеся части пассивными суб-датчиками (входящими в общую V2V-систему составного ТС) для чёткой идентификации контуров объекта на дороге.
saboteur_kiev
13.07.2016 16:163-4 метра это слишком много. Нужно же не только вперед-назад смотреть, но и что слева-справа.
А как часто GPS не сразу распознает, что я уже свернул на съезд на поворот, и определяет это когда я по данным GPS уже поперек встречной еду под мостом, и только тогда он сотфварно догадывается и перескакивает на нужную линию.
Ориентироваться только на GPS для позиционирования автопилота — нельзя.
saboteur_kiev
12.07.2016 18:15А как себя ведут радиометки в условиях отражения от всего, что встречается на улице?
Стальной бордюр, стоящие у обочины машины, едущие машины, рекламные плакаты на стальных листах, здания с различными окнами и дверями, которые могут отразить сигнал радиометки практически идеально, что и не поймешь где оригинал?
Многие машины из металла — если передо мной едет маршрутка, она экранирует все метки, расположеные перед ней?
И все это нужно делать в условиях интенсивной динамической обстановки
В авиации посторонних предметов мало, вдобавок еще и все источники связи требуют выключать.
kaichik
12.07.2016 15:54Смотрите, в чем проблема. Если метка=маяк, который светит вокруг свой айдишник (как это делают BLE-метки типа beacon), то она ничем не поможет с точки зрения распознавания автомобиля, его позиции, габаритов, скорости и прочей информации. Один из вариантов — поставить 4 метки по углам машины, чтобы примерно понимать ее габариты, но в свою очередь на каждую из сторон автомобиля придется поставить эдак пяток приемников. Трэш.
Чтобы был понятен масштаб проблемы: когда на базе маяков делают indoor-навигацию, для приемлемой точности приемник должен видеть примерно десяток стационарных маяков. А у автомобилей и применики, и маяки будут подвижными.
А если метка начнет передавать свои подробные данные, то это уже V2I и V2V)0serg
12.07.2016 18:14Я не думаю что там особенно высокая точность нужна. Двух меток (в начале и в конце машины), передающих небольшое количество метаданных о габаритах по идее должно хватить чтобы этот самый габарит примерно с точностью до метра определить. Для большинства задач по управлению автомобилем этого должно быть вполне достаточно.
saboteur_kiev
12.07.2016 18:18Как часто нужно опрашивать такую метку, чтобы понять, что она начала тормозить?
А если таких меток много?
А отражение?0serg
12.07.2016 18:26У людей «частота опроса» составляет менее 10 Гц и ничего, успеваем затормозить :)
Вопрос с большим числом меток вполне решаем и упирается в худшем случае в вопрос выделения достаточно широкой полосы частот (но с учетом цифровой обработки думаю она не будет большой)
Вот с отражениями сложнее.
Garruz
12.07.2016 15:43Общий roadmap мне видится примерно так:
• В ближайшем будущем – активное внедрение V2V-систем в выпускаемые новые модели. Плюс (пере)оборудование уже имеющихся авто – фактически это реализуемо для любых моделей, имеющих даже самую примитивную электронную бортовую систему.
Это уже станет громадным шагом к внедрению автопилотов. Фактически, в распоряжении бортового «ИИ» (в кавычках)) будет интерактивная карта всего движения в доступном радиусе, на которой отображены даже невидимые глазом/датчиками участники движения. Это уже чистое превосходство над водителем-человеком и над любыми видами бортовых «органов восприятия».
Впрочем, это не отменяет и параллельное развитие датчиков, они всё равно будут необходимы, но уже не настолько критически.
• Параллельно с этим разворачивание V2I. Конечно же, происходить это будет гораздо медленнее, чем развитие автомобилей. Но будет неизбежно, с каждым годом всё более и более повышая безопасность.
И, разумеется, максимально безопасным движение станет лишь тогда, когда на дорогах останутся только роботы. Но это уже вопрос достаточно отдалённого будущего, ИМХО.

kefirfromperm
12.07.2016 15:58+1Я только не понимаю, почему Вы считает эти проблемы неразрешимыми.
Стоимость датчиков упадет с началом массового производства. Да стоимость чего угодно постоянно падает при повышении качества. придумают другого типа датчики в конце концов.
Ну а про неуниверсальность. Можно писать трэки с реальных водителей и добить базу данных по мечтам и поведению в них по всей Земле. Как минимум крупные города будут покрыты очень быстро. Да и я не вижу неразрешимой проблему неуниверсальности. Сейчас может и нет решения, но нет ничего принципиального чтобы его ограничивало.
Цена. Персональные компьютеры тоже стоили когда-то тысячи долларов. Опять же, всё дешевеет.idiv
12.07.2016 17:47>>Можно писать трэки с реальных водителей и добить базу данных по мечтам и поведению в них по всей Земле. Как минимум крупные города будут покрыты очень быстро.
Если бы все было так просто. Эти данные попадают под защиту персональных данных и еще кучу законов, потому точно не вариант.kefirfromperm
12.07.2016 19:26Не подпадают. Не надо записывать «кто» поступил. Нужно записать только «как».
idiv
12.07.2016 21:31Трэк с реального водителя позволяет узнать где он живет, куда ездит, как часто ездит, с какой скоростью. Потому попадает. Я как-то связывался с отделом компании, ответственным за эксплуатацию электромобилей в пуле, спрашивал, можно ли узнать реальное потребление машины, просто среднее за все время для машины. Сказали, что сбор информация про потребление за поездку попадает под защиту персональных данных согласно законодательству Германии, так как может вывести на водителя через его стиль езды.
kefirfromperm
13.07.2016 07:47Ещё раз. Не нужно хранить информацию о водителе. Не нужно хранить информацию о времени поездки. Не нужно хранить информацию о том что какие-то трэки принадлежат одному и тому же водителю. Трэки надо резать по коротким участкам пути. Буквально: «правый поворот на перекрестке X», «въезд во двор дома №», «движение по шоссе №». Всё. Без информации о связи трэков ничего такого о чем вы говорите извлечь будет нельзя.
Насколько я понимаю, по российскому законодательству, например, достаточно удалить ФИО водителя. И это уже не будет считаться персональными данными.idiv
13.07.2016 08:41>>Трэки надо резать по коротким участкам пути. Буквально: «правый поворот на перекрестке X», «въезд во двор дома №», «движение по шоссе №».
Замечательная идея. Резать кто будет? Сервер? Так он вначале получит всю информацию, что уже попадает под защиту персональных данных. Автомобиль? Так у него есть идентификатор, а выгружая нарезанную информацию тот же сервер получит время и можно будет восстановить маршрут. Отправлять определенные участки? Так до этого нужно определить важные участки, т.е. это уже потом будет.
Это если забыть мою последнюю фразу — стиль езды тоже персональные данные. Трэк со скоростями = стиль езды.
>>Насколько я понимаю, по российскому законодательству, например, достаточно удалить ФИО водителя. И это уже не будет считаться персональными данными.
В плане защиты персональных данных Россия явно не лидер, как и по насыщенности автотранспортом и следованию ПДД, на нее равняться не стоит. Убрать только ФИО — это очень серьезно, в развитом мире никто не считает это за «защиту» уже лет 30, если не больше (например, в триллере 1988 года в США такое уже упоминается).lingvo
13.07.2016 12:00+1Защита персональных данных — вот это и есть серьезная проблема для развития автопилотов, да и вообще самого усовершенствования транспортной инфраструктуры.
Даже взять обыкновенные пробки — в странах, где эта самая защита отсутствует или не такая сильная, появляются прекрасные сервисы типа Яндекс.пробок, где действительно в реальном времени отображается информация о скорости проезда конкретного участка. И навигатор с учетом этого может легко запланировать оптимальный маршрут передвижения. А все потому, что каждый, кто пользуется сервисом, также является поставщиком информации о своей скорости.
С другой стороны возьмем продвинутую Германию — думаете там все еще лучше? Да нифига. Пробки передают по радио! В 21-ом веке! И эта информация основана, в основном, на наблюдениях с самолетов, вертолетов и стационарных камер на дорогах. Скорость потока никто не оценивает — их есть только две «Стоим конкретно» или «Стоп энд Гоу». Ну и запаздывание обновлений на 10 минут, не меньше. Как с учетом этого оптимизировать свой маршрут? Да никак практически. А все потому, что защита персональных данных в полном объеме.
Думаю, что с автопилотной инфраструктурой все будет еще хуже. В итоге будут все автомобили обвешаны датчиками по самое не могу, а водитель будет платить абонентскую плату, за то, чтобы получать информацию о пробках «на 10 минут раньше».
idiv
13.07.2016 20:30>>С другой стороны возьмем продвинутую Германию — думаете там все еще лучше? Да нифига.
Я тут живу и все это вижу и знаю. С одной стороны — данные защищены, с другой — статистику может собирать только государство, потому некоторой просто не существует в природе.

numitus2
12.07.2016 16:17Есть еще проблема с пониманием нестандартных ситуаций. К примеру если на дорогу выкатиться мячик, автопилот не затормозит, одна кто за ним скорее всего выбежит ребенок, и человек это понимает. Так же как я привык тормозить если вижу около дороги группы детей без взрослых, или пьяных.
lasalas
12.07.2016 17:21+1Начиная со второго случая ситуация станет стандартной для всех роботов. В этом отличие от белковых тел.
numitus2
12.07.2016 17:56к сожалению чтобы решить все эти проблемы необходимо наличие настоящего ИИ. Иначе это сведется к тысяче if ов для различных ситуаций что приведет к непредсказуемости поведения автопилота. Ведь надо будет еще отличить мячик от пустого пакета, или птицы.
tmteam
13.07.2016 01:26Оно так и будет работать. Только ИИ будет локализованным на конкретные задачи, и не ИИ а самообучающимся алгоритмом.

mx2
13.07.2016 01:54Так не бывает, нельзя просто взять и самообучиться отличать пакет от мяча, да еще и поведение потенциальных детей предугадывать. Это не пиксели распознавать…
lingvo
12.07.2016 16:22+1Как работающий в индустрии электроники — не считаю ни одну из указанных проблем каким-либо препятствием для стремительного развития автомобильных автопилотов в ближайшие годы.
По датчикам — не забывайте, что несмотря на свои ограничения, перспектив развития датчиков по сравнению с человеческими органами чувств вагон и маленькая тележка. Да и уже преимуществ по сравнению с человеком полно — например радар может увидеть человека в темноте, и распознать стоящий автомобиль в тумане — попробуйте усовершенствовать человека точно также.
Дальше — слепых зон (не считая пролета с Теслой) у датчиков скоро не останется — в результате тестов и испытаний довольно быстро найдутся подходящие варианты размещения тех же датчиков и их диаграмм направленности.
В случае же каких-то ограничений — как уже писали — переходим на другие виды — например добавить какие-то полоски на все автомобили, или новый вид разметки — это не такая уж большая проблема для инфраструктуры.
По универсальности: — я уже не одну сотню тысяч км отмотал по европейским дорогам и скажу вам — если сделать автопилот работоспособным только на автобанах — где нет разворотов и пересечений на одном уровне, нет встречного движения, всегда есть разметка. И если этот автопилот будет работать только на скорости в 100км/ч и меньше — я с удовольствием отдам N килобаксов за возможность сидеть и читать газетку или работать на компьютере в то время, как этот автопилот будет рулить по автобану. Потому, что ехать 8 часов в таком режиме, а если еще и в тянучке — самый обезьяний труд. Так что мне не нужен автопилот в городе, мне не нужен он и на обычной дороге. Дайте только автобан и все. И поверьте — автопроизводители тоже это понимают.
По рыночной цене — я вообще не понимаю о чем это. Стоимость системы? Так 50-60% ее компонентов уже входят в стоимость современного авто — всякие датчики парковки, мертвых зон, камеры кругового обзора. В Вольво даже радар передний в базе. Так что будет автопилот стоить на несколько килобаксов дороже — какие проблемы?
Ну и вообще последний коммент насчет 20% опасных случаев — вроде как это многих отпугивает. Мол, нафиг тот автопилот, если из-за вот этих случаев придется постоянно держать руки на руле или держать внимание на дороге. А иначе — потенциальный труп.
Не беспокойтесь, не придется. Если с существующими системами не удастся сделать 100%-но безопасную автономную поездку по тем же автобанам, то производители придумают другие варианты. Как по мне самый простой — понизить максимальную скорость и усилить пассивную безопасность, чтобы, например, при фронтальном столкновении с бетонным блоком, пассажиры 100%-но остались живы или отделывались незначительными ушибами.kaichik
12.07.2016 16:36Аргументация «ну придумают же что-нибудь» от разработчика электроники меня пугает). Активные круиз-контроли появились 15 лет назад, парктроники еще раньше, камеры — совсем немолодая технология. И за последние 10 лет только камеры совершили качественный скачок. Просто появились ресурсы для обсчета в реальном времени.
В индустрию уже полтора десятилетия заливают несколько миллиардов ежегодно только на R&D, и проблем хватает. Слепые зоны остаются, проблемы с пониманием обстановки есть, и с диаграммами направленности тоже. Я 10 лет в этой теме, верьте.
Что касается автобанов, то я и пишу, что частные случаи уже решены и ими скоро можно будет пользоваться на серийных машинах. Скоро — это ближе к 2020. И все равно ответственность останется на человеке, потому что ремонтные работы (раз вы ездили, то знаете как на в полосе сужениях по +10 см к ширине машины оставляют) или вероятность внезапного перестроения автопилот к тому времени не научится отрабатывать.
И главное. Легковые автомобили не в приоритете у тех, кто делает автобанные автопилоты. Намного выгоднее (и важнее) решить задачу автобанного автопилота для грузовиков. У них это значит прямую экономию сотен тысяч или миллионов на оплату труда водителей, а не копейки в цене новой легковушки. Но что-то пока не решена задача.
lingvo
12.07.2016 16:53| Аргументация «ну придумают же что-нибудь» от разработчика электроники меня пугает)
Я не говорил, придумают «что-нибудь», я говорил, что уже вижу не мало способов усовершенствования, даже не будучи специалистом в конкретно данной области, но зная, какие перспективы открываются с развитием электроники, быстродействия и IoT.
Даже например: Вам приходило в голову, что наверняка множество аварий случается на одних и тех-же аварийно опасных участках? Наверняка на том же перекрестке, на котором сбило теслу, бывало не одно ДТП с поворотом налево. А теперь представим, что с помощью автопилотов, IoT и облаков была создана целая база таких мест, участков, с указанием, основных причин, погодных условий и т.д. Возможно? Конечно! Ну и в конце концов добавим в автопилот функцию предупреждения, чтобы при подъезде к этим местам, он начинал вопить «Эй чувак, я дальше не могу! Давай-ка ты возьмешь управление на себя, пока мы это чертово место не проедем!» Реализуемо? Вполне! Дорого? Думаю хватит даже краудфандинга на kickстартере для стартапа. Уменьшит количество аварий с участием автопилотов? Несомненно.
И это только один из вариантов, пришедших мне в голову. А у разработчиков автопилотов их сотни.
QR-code
12.07.2016 17:43Ну и в конце концов добавим в автопилот функцию предупреждения, чтобы при подъезде к этим местам, он начинал вопить «Эй чувак, я дальше не могу! Давай-ка ты возьмешь управление на себя, пока мы это чертово место не проедем!»
Плохая идея. Во-первых, человеку, едущему пассажиром, потребуется время на осознание происходящего вокруг. Кто-то на хабре приводил хорошую аналогию: вы едете пассажиром с обычным водителем, и в один момент он отрывает руль, вставляет его в бардачок и говорит «Рули!».
Во-вторых, чем больше человек будет ездить с автопилотом, тем быстрее потеряет навыки вождения. И в самый ответственный момент не сможет принять управление.
Поэтому, на мой взгляд, Google прав: если робомобиль не может двигаться сам во всех случаях, ему не место на дорогах, т.к. вместо увелечения безопасности он может ее уменьшить.Garruz
12.07.2016 18:23>>> Во-вторых, чем больше человек будет ездить с автопилотом, тем быстрее потеряет навыки вождения.
Вы навели на очень занятную мысль…
Ведь получается, что в отдалённом будущем, когда везде будут только автопилоты (к тому моменту уже полноценно развитые) – людям не понадобится сдавать на права, и само понятие «водитель» со временем вообще исчезнет как явление?
Иначе говоря, без автопилота (в случае какого-либо технологического коллапса, например) – человек будет неспособен самостоятельно передвигаться на большие расстояния, поскольку просто не будет уметь водить, в цивилизации того времени это умение перестанет быть нужным.
Вполне возможно, что (опять же, в отдалённом будущем) из средств передвижения даже вообще исчезнет возможность ручного управления, за ненадобностью (как уже сегодня в гугломобилях).
Что бы вот сделать с этой потенциальной проблемой?..lingvo
12.07.2016 20:37+1Если говорить о проблемах такого уровня, меня беспокоит больше, например, что люди скоро разучатся писать (ручкой или карандашом), так как клавиатура заменяет письмо. Это ИМХО будет большей проблемой.
Garruz
12.07.2016 20:56Эта проблема уже набирает силу, насколько вижу.
Сам ещё несколько лет назад заметил, что стал писать «как курица лапой» – очень мало практики, в среднем писать от руки приходится не более 3-4 раз в месяц, да и то лишь достаточно краткие записи.
К счастью, хоть расписываться ещё не разучился – в работе масса бумажных документов под подпись… )
Туда же, кстати, и счёт – уже нынешние поколения (1990+) в основной своей массе достаточно плохо владеют письменным счётом и счётом в уме, калькуляторы едва ли не на корню искоренили необходимость этих навыков.
tmteam
13.07.2016 01:29По крайней мере на первых порах — можно вспомнить аналогию про коробки автомат и механнику
Garruz
13.07.2016 01:42Но коробки независимы от внешних факторов. Будет бензин – поедет любая машина, что с механикой, что с автоматом. Не будет электричества – после посадки аккумуляторов встанут все машины, как с механикой, так и с автоматом.
Тут же идёт разговор о самом ручном вождении. Особенно если дело пахнет вообще полным отказом от самой возможности ручного управления.
QR-code
13.07.2016 19:16Что бы вот сделать с этой потенциальной проблемой?..
А нужно ли что-то делать? Это не первый раз, когда люди попадают в зависимость от технологий, теряя навыки. К примеру, достаточно отключить электричество во всем городе, и мы потеряем освещение, связь, водоснабжение, канализацию и т.д.
Вообще сомнительно, что ручное управление исчезнет совсем. Все равно останутся люди, которым нравится водить самим, да и транспорту для экстренных случаев может понадобиться ручное управление.Garruz
13.07.2016 21:24Ну, конкретно в перечисленных вами случаях мы потеряем удобства, а не навыки. Согласитесь ведь, для «компенсации» каждого из этих пунктов не требуется каких-то человеческих навыков, требующих достаточно долгого обучения.
А вот если вдруг встанут автопилоты, то получится парадокс – вокруг куча способной передвигаться техники, но никто просто не умеет водить её вручную, все давно разучились (либо вообще не учились).
Что же касается конкретно ручного управления – вряд ли оно останется, на мой взгляд. К чему оно в массовых моделях, если к тому времени самостоятельно управлять смогут лишь единицы энтузиастов?QR-code
14.07.2016 13:14Без этих «удобств» современные люди не проживут. Только всякие энтузиасты-выживальщики, имеющие запасы нужных вещей и умеющие добыть огонь и чистую воду. И точно так же вокруг будет куча техники, которая без электричества превратиться в металлолом.
Garruz
14.07.2016 14:45Я немного о другом. Допустим, находят люди полностью заряженный (или заправленный) автомобиль, вполне способный (!) передвигаться. Но водить его никто просто не умеет. Или там вообще нет ручного управления. Это вот «обидно будет»… =)
Без удобств – да, будет хаос. Но, ИМХО, лишь первое время. Потом привыкнут, освоятся. Нетрудно научиться пользоваться свечками и кострами, ходить «по воду» и копить дождевую, и даже привыкнуть к кустикам или горшку, пардон.saboteur_kiev
14.07.2016 17:28Ну разберут и построят с управлением. И возможно вместо руля с педалами сразу приспособят джойстик, чтобы с 5 лет можно было полноценно научиться водить при любых габаритах и проблемах.
А сейчас — там автомат, там механика, там для инвалидов, там для леворульных…Garruz
14.07.2016 19:44Получается, что всё равно придётся заново учиться. И заново изобретать для белковых водителей ПДД – которые в отдалённом «будущем автопилотов», вполне возможно, будут весьма существенно отличаться от наших.
saboteur_kiev
15.07.2016 00:09В отдаленном будущем, для автопилотов дороги будут другие. Почему бы и ПДД не разработать новые?
Но вообще, у вас странная идея. Если перестанут работать все автопилоты, то наступит «безумный макс», или «водный мир», так что вопросом научиться водить, будут заниматься в последнюю очередь, после «найти пожрать» и «не дать себя убить»Garruz
15.07.2016 00:13Так в «Безумном Максе» они хоть на машинах рассекали. А тут будут пешком бегать туда-сюда в поисках «найти пожрать»… =)
ksil
15.07.2016 14:53если коллапс обеспечивающей инфраструктуры будет достаточно глобальным и продолжительным, то большая часть населения банально вымрет от отсутствия пропитания. зимой еще многие умрут от холода.
возьмите какой нибудь мегаполис, надолго ли дров хватит в окрестности пусть даже 50 км?
человечество размножилось за счет использования энергии (в текущий момент, во многом ископаемой). если ее убрать, то биосфера сможет обеспечивать население планеты на несколько порядков ниже, чем сейчас.
lingvo
14.07.2016 13:28Если сегодня встанут или исчезнут компьютеры, мы получим глобальный катаклизм, голод, смерти и войны. Если завтра откажет электронное защитное реле на какой-либо атомной станции, получим глобальную экологическую катастрофу с многими жертвами. Т.е. проблемы гораздо посерьезнее, чем просто «неспособность человека самостоятельно передвигаться на большие расстояния»
Автопилот — далеко не первый и не последний случай, когда люди доверят свои жизни технологии, придуманной ими самими.Garruz
14.07.2016 14:52Вновь согласен.
Но рассматриваю вопрос не в аспекте зависимости вообще (тут можно привести ещё много примеров, начиная аж с механических устройств) – а в аспекте утраты уже имеющихся и очень массовых навыков и умений (как в вашем предыдущем примере с письмом от руки).
Это вот новый для человечества феномен, на мой взгляд.dimm_ddr
14.07.2016 17:33Не такой уж новый. Выглядит как промышленный переворот в недалеком прошлом. Так же очень сильно уменьшится количество людей которые будут уметь водить, также это случится за весьма длинный промежуток времени и также будет полно мест на планете, где в отстающих странах это будет достаточно широко распространено еще очень долго. Хотя если брать промежуток времени в несколько столетий, то может и совсем исчезнуть водители, но что там будет через несколько столетий вообще сложно сказать.
Garruz
14.07.2016 18:55Честно говоря, никак не могу припомнить исторических примеров утраты настолько массового навыка.
Были, конечно, почти полные исчезновения отдельных профессий – трубочист, кочегар, фонарщик, например. Сейчас на очереди ещё несколько. Но это именно отдельные профессии. А чтобы исчезали массовые умения, независимо от профессии – не помню.
Если только сравнить с верховой ездой. Но даже в этом случае менялись лишь средства передвижения, при этом не отпадала сама необходимость уметь ими управлять…dimm_ddr
15.07.2016 10:11Исчезли навыки производства конкретных вещей, вроде одежды например. Просто исчезли не полностью — остались энтузиасты, остались руководства. Также скорее всего будет и с вождением — будет какая-то группа людей умеющих водить, будет много руководств, начиная от навыков вождения и заканчивая инструкциями по производству простейших средств передвижения. Если при отказе автопилотов не откажет вся остальная электроника, в частности не будут потеряны все архивы этих руководств, то, имхо, будет очень неприятно, но вполне решаемо.
Garruz
15.07.2016 20:47Ну где же «исчезли»? Одежду шьют десятки миллионов портных по всему миру, и моделируют, и кроят. Если придётся, то смогут шить даже вручную – только дольше.
По второму вопросу – да, со временем можно восстановить всё (включая и сами автопилоты)). Но на весь этот срок человечество будет практически лишено способности быстро передвигаться на дальние расстояния.
ksil
15.07.2016 14:55выращивание еды например.
Garruz
15.07.2016 20:52Как и в примере выше с портными – навык не утрачен, этим занимаются десятки миллионов человек по всему миру.
P.S. Причём, в городах и несколько веков назад особо ничего не выращивали, продукты покупали на рынках и в лавках, как и сегодня. Так что технический прогресс тут особо ни при чём…
lingvo
12.07.2016 20:42В отличии от ситуации, когда опасность распознается автопилотом самостоятельно и время реакции ограничено, в этом случае автопилот может предупреждать заранее — за 5, 10 минут до подъезда к препятствию. То есть есть время приготовиться и прийти в себя.
QR-code
13.07.2016 15:50Все равно это не особо удобно: решил вздремнуть, а автопилот тебя будит «Тут, это, порулить надо», и нужно проснуться, понять ситуацию и пытаться сконцентрироваться на вождении.
lingvo
13.07.2016 16:20Возможно. Но ситуацию можно настроить под себя. Например сказать автопилоту — хочу маршрут подлиннее, но без приключений, и скорость чтоб поменьше. Главное — завтра к утру быть там-то…
И можно идти спать на заднее сиденье.
Bedal
12.07.2016 17:22-2Отвечу сразу троим (извините, по отдельности не могу, слишком долго получится — раз в час):
2 myxo:
>Автор просто написал свое ИМХО, я вот так и не понял почему он считает проблемы нерешаемыми.
Да, но именно, что необоснованно и просто IMHO — для поста это, мягко говоря, маловато и слабовато.
2 kaichik:
>У пассивных систем в видимом диапазоне полно минусов — нет прямого измерения скорости,
И? Как человек меряет? Почему этого недостаточно?
>плохое разрешение по дальности
больше, чем у человека. А с учётом взаимообмена информацией — много больше.
>влияние погодных условий,
У автопилота в любом случае должно быть снижение скорости вплоть до остановки, если погодные условия не позволяют ехать. Что, кстати, исключит множество аварий, которые происходят сейчас.
>тяжелая обработка и т.п.
вот уж это — самый слабый из возможных аргументов. Как раз в обработке — вообще весь смысл, и как раз это — основа основ. Это и надо развивать.
>За приемлемые деньги ничего из этого не починить.
Весьма голословное заявление.
>Про военных и самолеты как единое целое давайте не будем, там дофига технологий, которые в серийное производстов и малые деньги вообще не переходят никогда.
Там та же технология с распознаванием образа вместо обнаружения сканирующей точкой.
>Кстати, и проблема с помехами радаров рядом решается элементарно.
Когда машин будут рядом сотни — зачем нужен этот фоновый мусор? Уровень этого фона от локаторов/лидаров будет на многие порядки больше фона, создаваемого телефонами — при том, что его тоже довольно старательно уменьшают.
Гораздо больше ништяков можно получить от обмена информацией, чем от активной локации.
Главная Ваша ошибка — Вы путаете «легче» и «лучше». Активной локацией определиться на дороге в рамках первого этапа разработки — легче. А вот определить особенности поведения велосипедиста, тонкости расположения машины, едущей «собачьим бегом» и распознать прицеп с большим клиренсом (тот самый случай) — за счёт «зрительной» обработки — лучше.gsaw
12.07.2016 18:03Обмен информацией чреват быть взломанным. Я сразу вижу сидящих в кустах у обочены хакеров и километровые пробки машин, думающих, что в переди на полосе бродят фантомные люди. Машины должны быть автономны и сами принимать решения.
kaichik
12.07.2016 18:11Проблемы не считаю решаемыми, потому что пока у отрасли нет однозначного решения для них. Примеров обратного, кстати, так и не увидел.
>У пассивных систем в видимом диапазоне полно минусов — нет прямого измерения скорости,
>И? Как человек меряет? Почему этого недостаточно?
Никак не меряет, только оценивает, этого недостаточно, потому что приводит к авариям (не успел остановиться перед впередиидущим автомобилем, не успел повернуть перед идущим навстречу автомобилем и т.п.)
>плохое разрешение по дальности
> больше, чем у человека. А с учётом взаимообмена информацией — много больше.
отличная оценка. Да, с кем и какой информацией у вас меняется камера?
> У автопилота в любом случае должно быть снижение скорости вплоть до остановки, если погодные условия не позволяют ехать.
> Что, кстати, исключит множество аварий, которые происходят сейчас.
Город засыпает, просыпается мафия. То есть ночью, в туман, в снег у нас дорожное сообщение прерывается.
>тяжелая обработка и т.п.
>вот уж это — самый слабый из возможных аргументов. Как раз в обработке — вообще весь смысл, и как раз это — основа основ.
> Это и надо развивать.
Давайте напишем в Intel с Альтерой, что им нужно повысить скорость обработки на порядок, а то они плохо стараются, мало десятков миллиардов заливают в числодробилки. NVIDIA в копию поставим. Выше уже расписали и аргументировали — скорость обработки в реальных задачах наращивать не получается.
>За приемлемые деньги ничего из этого не починить.
>Весьма голословное заявление.
То есть физическая невозможность кардинально повысить скорость обработки процессоров или например минимальный прогресс локаторов и лидаров за последние десятилетия вас не убедят.
> Когда машин будут рядом сотни — зачем нужен этот фоновый мусор? Уровень этого фона от локаторов/лидаров будет на многие
> порядки больше фона, создаваемого телефонами — при том, что его тоже довольно старательно уменьшают.
> Гораздо больше ништяков можно получить от обмена информацией, чем от активной локации.
Фон от телевышек, радио, сотовых, вайфаев и всего остального вас не пугает, а вот от активной локации да, избавиться бы.
Кстати, вы же понимаете, что локатор, который посветил на 200 метров на проехавшей мимо машине, излучает меньше чем аппаратура V2I-инфраструктуры, которая будет светить на сотни метров, причем в одном и том же месте, причем всегда?
Кстати, V2I очень слабо поможет в вопросах, для которых как раз и нужна локация — например, предотвращения столкновений — просто из-за присутствия лага.
> Главная Ваша ошибка — Вы путаете «легче» и «лучше».
> Активной локацией определиться на дороге в рамках первого этапа разработки — легче.
> А вот определить особенности поведения велосипедиста, тонкости расположения машины,
> едущей «собачьим бегом» и распознать прицеп с большим клиренсом (тот самый случай) — за счёт «зрительной» обработки — лучше.
Да это вы подгоняете реальность под свои представления. Камеры не видят скорость? Потому что не надо. Не умеют темноту или туман? Мы остановимся.
Никто в мире не разрабатывает систему, которая опирается только на пассивные датчики, у всех sensor fusion, и у всех так или иначе активные системы.
LittleSquirrel
13.07.2016 01:15+2>>У пассивных систем в видимом диапазоне полно минусов — нет прямого измерения скорости,
>И? Как человек меряет? Почему этого недостаточно?
Человек оценивает дистанцию, во многом, за счет очень продвинутой классификации и памяти. «Вот этот грузовик у нас 5 метров в высоту, поэтому когда он вот такого размера — до него примерно 40 метров». Именно поэтому пока в ходу были оптические дальномеры соответствующий персонал зубрил книжечки со схемами чужой военной техники и ее размерами.
Проблема в том, что все алгоритмы классификации с которыми я сталкивался — вероятностные. Я пока не знаком со случаем сертифицированной критической управляющей системы использующей вероятностный алгоритм. Даже в упомянутой тут sensor fusion приходится отказываться от интересных конфигураций с обратной связью ради верифицируемости системы.
lasalas
12.07.2016 17:31+2Как в том анекдоте: чукче не надо бежать быстрее медведя, достаточно бежать быстрее геолога. Так и автопилоту, чтобы отвоевать себе место, не надо идеально справляться со всеми ситуациями, достаточно справляться в среднем лучше человека.
Dum_spiro_spero
12.07.2016 18:04Интересно как работает автопилот.Строит ли внутри 3D модель с предсказанием кто куда двигается и МОЖЕТ двинуться в ближайшие скажем пять секунд?
Также мне кажется тут (фантазирую) тут нужны какие-то а-ля шахматные алгоритмы — с оценками фигур.
Ну и странных кейсов может быть очень много — впереди движется тонированная девятка с скоростью ниже скорости потока — повышаем оценку опасности объекта и стараемся держаться от него подальше. Впереди движется BMW X6 между полос и со скоростью существенно ниже скорости потока — аналогично (видел такое много раз). В зеркало видим приближающегося «Шумахера»-шахматиста. Никак не реагируем. Впереди образовалось пространство куда МОЖЕТ ЗАХОТЕТЬСЯ кому-нибудь вильнуть без поворотников — становлюсь внимательнее. Свободная дорога, зеленый, приближаюсь к незнакомому перекрестку — возможно я до начала перекрестка доеду когда зеленый начнет мигать, а перекресток длинный — так что на перекрестке окажусь уже на красный — рискованно — лучше снизить скорость. Впереди далеко ремонт по центру дороги — значит все будут перестраиваться вправо — лучше начать делать это заранее. Я знаю, что впереди БУДЕТ перекресток с поворотом налево — лучше заранее перестроиться вправо, чтобы не попасть в левый ряд. В общем любой автомобилист таких случаев вспомнит вагон. Интересно как у автопилотом с прогнозом? КМК надо строить двух-трехмерную модель и постоянно решать задачу о движении многих тел в двусполовиномерном пространстве. Откуда половинка — так как раз разные уровни авто по высоте и какие-нибудь торчащие трубы без флажков.
worldmind
12.07.2016 18:131 и 3 проблемы уверен легко решаются если автомобили научатся общаться.
А существование 2-й проблемы ещё надо доказать.

potan
12.07.2016 18:23«И автопилот еще долго не сможет справиться с тем, что щелкают белковые выпускники автошкол.» — Вы уверены что в той же ситуации «белковый водитель» заметил бы фуру?

Altaisky
12.07.2016 18:24И в статье и в комментах автор старательно закрывает глаза на один момент. Каким бы ни было качество датчиков и перспектива их усовершенствования (а тут вовсе всё не так плачевно, как нам здесь говорят), какими бы ни были алгоритмы и нейронные сети (а мы прямо сейчас наблюдаем революцию в этой области), решающую роль во всей этой истории играют совсем не эти факторы, а фактор сетевой самокоординации машинного потока. Тот страшный сон, который видит автор — на улицы выезжают автомобили без водителей и тут же начинают самозабвенно во всё и вся и друг в дружку врезаться выглядит с точностью до наоборот. Чем больше будет робомобилей, тем безопаснее будет становиться движение. Как справедливо было замечено, " робот с роботом — договорится", и даже при наличии некоторого процента непредсказуемых автомобилей с человеками, смогут создать для него и для себя наиболее выгодную и безопасную ситуацию на дороге.
kaichik
12.07.2016 18:25Я никого не пугаю и не вижы страшных снов, роботы не будут сталкиваться друг с другом). Просто инфраструктура — это отдельная тема, присвоим ей номер три :).
Altaisky
12.07.2016 19:19Какая же это отдельная тема, это всё равно как описывать человека без головы, утверждая, что голова — это отдельная тема, присвоим ей номер три)). Не отдельная и не три, а именно, что важнейшая, по определению отличающая машинные способности от человеческих. Не стоит представлять машину будущего как автономный робомобиль. Каждый автомобиль в первую очередь будет элементом сети, выполняя соответствующие функции и получая соответствующие преимущества. Представим на секунду, что в том пресловутом случае и Тесла и фура были на автопилоте, и при этом ещё и обменивались данными о своём местоположении. Даже если бы показания датчиков Теслы не соответствовали, вряд ли с фурой мог одновременно произойти тот же конфуз. По мажоритарной логике система бы выбрала верное решение для обоих транспортных средств, причём ещё до того, как водитель или датчики что-то там обнаружили или НЕ обнаружили бы.
kaichik
12.07.2016 19:47У инфраструктуры один большой минус: она не учитывает объектов вне ее требований. Автомобиль без датчика или телега, ребенок без курточки с датчиком, дорога без V2I. Да что там — сбой случился, или помеху поставили.
Поэтому автономные автомобили и проектируют пока без опоры на инфраструктуру, они обязаны ездить без нее.Altaisky
12.07.2016 22:17Во-первых, она учитывает, автомобили с датчиками будут дружно беречься дурного автомобиля без датчика и дружно беречь ребёнка без курточки, сбои и помехи это проблемы, решаемые в текущем порядке (вылетел ты из системы — система пометила тебя как проблемную единицу с соответствующим перераспределением отношения к тебе окружающих тебя системных авто), либо это форсмажор, и тут тоже поведение, соответствующее форсмажору, но ведь это исключение, ситуация на дороге не состоит целиком из форсмажора.
А во-вторых, этот ваш большой минус прекрасно стремится к нулю с увеличением количества системного транспорта. Любую телегу и любого ребёнка при желании можно снабдить передатчиком координат, чтобы они хотя бы пассивно снижали аварийную опасность. А на всех остальных лосих и калдырей будет достаточно ОБЩИХ глаз, ушей и мозгов единого транспортного организма.
zergo26
12.07.2016 18:25Я не согласен с автором. По моему мнению автопилот более чем реален, просто для его реализации и безошибочной работы нужны определенные условия(рамки).
Понятное дело там где физически автомобиль с идеальным пилотом из ситуации выйти не сможет то о каком автопилоте речь, аварии будут случаться пока будет вмешан человек(будь то водительдругого авто, пешеход или к примеру хакер который взломает общую систему координирования автомобилей и все начнут двигаться хаотически(это из ряда тероризма хотя вполне возможно))
Если создать хорошие условия, имееться ввиду трасса, разметка, ограждение, координирование автомобилей между собой и т.д. я думаю автопилот реален даже сегодня. Хотя и потребует это больших усилий и средств.
Отдельно хотелось прокоментировать слова автора где говорилось о вписывании автомобиля в поток, обгон, перестроения и т.д… Этот вопрос решаеться «общением автомобилей» точнее он даже не будет вставатьkaichik
12.07.2016 18:28Большой минус V2I инфраструктуры — она пасует при управлении реальным потоком в динамике, когда на расстоянии метров находятся десятки автомобилей и двигаются со скоростью в 10-20 метров в секунду. На круг получается так, что в информации от инфраструктуры машине накапливается порядка 0,3 секунды задержки. Это непозволительно много.
А «хорошие условия» — это строить инфраструктуру заново. Никто всерьез не думает об этом, экономики нет.

DenerKup
12.07.2016 19:47+5Наконец-то статья, разбавляющая всю эту истерию «вот-вот ИИ начнут начнут править миром (в смысле водить автомобиль)».
Вот меня как-то воротит, когда все, что на нейросетях, называют ИИ. Это же просто математическая модель способная распознавать сложные образы и все! Весь прогресс в этой области конкретно сейчас обусловлен двумя вещами: 1) по некоторым задачам появились огромные массивы данных для обучения; 2) появились мощности способные глубокие модели на эти данные натаскать. Все что сводится к неинтеллектуальному распознаванию сетями, того на чем они учились, решается: классификация объектов, действий на видео и т.д. Иногда даже бывают впечатляющие примеры, когда сетям удается генерировать подписи к картинкам. Но, нейросеть становится глупой, когда возникает ситуация, которой ее не учили. Допустим обучали находить животных, и вот тебе раз на входе леопардовый диван, на выходе будет леопард. Вот человек в здравом уме перепутает диван и леопарда? Проблема, конечно, решается: в датасет напихиваются леопардовые диваны и происходит переобучение. А теперь представьте себе: 1) есть почти все множество нестандартных ситуаций на дорогах, с которыми должен работать автопилот 2) на каждую ситуацию нужно наснимать кучу видео с видом от автомобиля 3) все эти видео должны быть размечены (отсылка к тем, кто вспомнил про youtube и авторегистраторы). Это безумные объемы и никакой синтетический город или что-то в таком духе не помогут. Если в датасете будет всего одна или две ситуации из миллионов, когда неадекватная бабуля переходит дорогу, можно смело говорить, что автомобиль бабулю задавит. Я думаю, что езда на автомобиле может и состоит на 90 процентов из повторяющихся видов из окна, но вот наш мозг в остальных 10 процентах спасает вас от смерти.
Для сторонников общения автомобилей друг с другом. Почему никто никогда не думает о стабильности и устойчивости такой системы. Просто представим, что дороги уже заполонены такими сетевыми автомобилями. Завтра один из автопроизводителей случайно вносит в общение между авто какую-то ошибку. Вот ошибка разносится по всей дороге, и все автомобили уже живут в параллельном мире, не имеющем отношения к реальности. На самом деле все испортить еще легче: возникает ситуация, когда клуб любителей ретро-автомобилей решает сделать заезд из одного города в другой. Вы предлагаете выключить все сетевые авто на это время? У них же уже не будет полного понимания движения на дороге, т.к. «железные динозавры» ретро-клуба им ничего не шлют… И снова возникает требование на автономное принятие решений, и мы снова уходим к автопилоту способному действовать в одиночку. А теперь подумайте, как тогда придется внедрять «общительные» автомобили. Ведь их же сначала на дороге будет мизерный процент среди прочих. В мире редко такое бывает, когда щелкнул пальцем, и у всех новый автомобиль.
Вообще сторонники идеи «белковые тупые и действуют неэффективно», часто забывают, что «эффективно» не значит «надежно и долго проработает». И даже более интересный факт: электричка эффективней личного автомобиля (экологичней, безопасней, больше КПД). В духе такой философии я бы скорее пропагандировал не умные автомобили, а полную замену личного транспорта на суперэффективные автобусы и грузовые автопоезда на огороженных дорогах, где они уже идеально «по алгоритму» будут эффективно и надежно кататься (выходит ЖД какая-то).Garruz
12.07.2016 20:40>>>Для сторонников общения автомобилей друг с другом. Почему никто никогда не думает о стабильности и устойчивости такой системы.
>>> У них же уже не будет полного понимания движения на дороге, т.к. «железные динозавры» ретро-клуба им ничего не шлют…
Так ведь прочие датчики никто не собирается отменять. =)
Даже с массовым внедрением V2V, на дорогах останутся прочие препятствия – от оказавшихся на проезжей части пешеходов или животных до ям или упавших деревьев, например. Так что, бортовые системы всё равно будут всегда задействованы параллельно V2V-«общению».
Поэтому «ретро-пробег» из вашего примера будет рассматриваться и распознаваться всеми роботизированными авто просто как движущееся препятствие, нероботизированный участник движения, которого надо объехать или пропустить по всем правилам ПДД. Более того – роботы вполне неплохо справляются с этим уже сегодня.
Что же касается «неэффективности белковых» – конкретно в этом направлении роботы действительно эффективнее. Поскольку неспособны думать и, следовательно, лишены эмоций и прочих человеческих недостатков. «Недостатков» – конкретно в аспекте безопасности дорожного движения.
Зато способны с сугубо роботовским «занудством» неукоснительно следовать правилам в режиме 24/7. Что и требуется на дороге, в общем-то…
P.S. А вот полностью уйти от частного транспорта к общественному – ИМХО, получится ещё очень не скоро. Если вообще получится. Тут уже просто особенности нашей психологии.
P.P.S. Да и общественный транспорт далеко не всегда безопасен, впрочем…DenerKup
12.07.2016 21:09Так ведь прочие датчики никто не собирается отменять. =)
В комментариях выше высказывалась мысль, что легче реализовать общение автомобилей для координирования, чем заниматься крутыми датчиками и умными алгоритмами. Вот до тех пор, пока на дороге есть неинтегрированные в сеть подвижные объекты, все равно придется заниматься разработками крутых автопилотов с умением автономного принятия решений. Что особенно актуально будет при движении на таких дорогах, где за день 1-2 авто проезжает (например, в деревнях, а то и в какой-нибудь не очень умный трактор можно въехать).
Что же касается «неэффективности белковых» – конкретно в этом направлении роботы действительно эффективнее.
Я не спорю, что движение с неукоснительным соблюдением правил движения эффективно. Но стоит в окружении появится объекту, который правила нарушает, как все летит к черту. В ПДД же не прописаны все варианты действий на любое нарушение любого другого участника движения? Будет плохо, если Вася нарушит правила, и все робомобили остановятся до тех пор, пока Вася не скроется из виду, потому что иначе из-за неадекватного Васи соблюсти ПДД просто невозможно. Когда другие нарушают, иногда и робомобилю придется нарушать для обеспечения безопасности пассажиров (например, пьяный выехал на встречку и можно успеть самому отвернуть на встречку. Такие ситуации и будут определять надежность и стабильность системы, т.к. если один нарушитель ее выведет из строя, будет уже очень неэффективно. А нарушители будут всегда, следовательно четкими правилами и логиками не обойтись. Выходит что-то типа компромисса: либо «супер эффективно и в тепличных условиях», либо «не очень эффективно, зато как не пинай работает».Garruz
12.07.2016 23:14>>> В комментариях выше высказывалась мысль, что легче реализовать общение автомобилей для координирования, чем заниматься крутыми датчиками и умными алгоритмами.
Не заметил, вроде, такой мысли.
Если это про мой пост, то там выдвигался лишь тезис о том, что внедрение V2V значительно снизит нынешнюю критическую важность бортовых датчиков. Но не говорилось о том, что при активном внедрении этой системы датчики вообще перестанут быть нужными.
>>> Но стоит в окружении появится объекту, который правила нарушает, как все летит к черту. В ПДД же не прописаны все варианты действий на любое нарушение любого другого участника движения?
В сети есть нашумевшее видео ярого поклонника «Теслы», в котором «полу-автопилотом» весьма недурно отрабатывается манёвр уклонения при агрессивном обгоне.
Да, знаю, что по злой иронии судьбы именно этот человек и стал первым погибшим в своей «Тесле». Но там были совершенно разные ситуации. Более того – будь в той трагической ситуации оба автомобиля оборудованы V2V-системами, то не было не то что летального исхода, а даже самого ДТП.
P.S. А конкретно в ПДД прописано, что при возникновении аварийной ситуации допускается только экстренное торможение, ответственность за последствия любых «избегающих» манёвров при этом полностью ложится на водителя.
Но даже эти последствия лучше всего сможет просчитать робот. И выбрать наиболее оптимальный вариант – тормозить с лёгким ударом или маневрировать, создавая потенциальную опасность для других участников движения (а также оценивать, имеется ли вообще эта опасность и можно ли маневрировать).
arheops
12.07.2016 20:58Конечно, человек перепутает диван с леопардом. Смотря как показать, смотря кому(есть ОЧЕНЬ много людей которые леопарда никогда не видели, есть не меньше тех, кто не видел никогда диван), смотря сколько человеку лет. Сети дают распознование на уровне двухлетнего ребенка, но десятьлет назад они давали распознование как полугодовалый малышь.
DenerKup
12.07.2016 21:38+1Дело в том, что сеть «может увидеть» бурого медведя, серую кошку, леопарда и обучиться различать их только лишь по цвету/текстуре. Человек увидевший этот набор обычно понимает, что это животные с лапами и головой (т.к. проводятся аналогии со своими частями тела: глаза, уши, ноги). Когда они увидят диван, нейросеть тупо скажет, что «леопард». Человек заподозрит, что что-то не так: ведь головы нет, лап нету. Тогда в голове «появится новая метка» на этот объект, т.к. это явно не леопард, но похож. Стоит человеку после этого увидеть 1-10 раз, что это «диван» (ему скажут, что так называется), он запомнит это. А вот нейросети таких диванов придется «разглядывать» 100500 штук, т.к. одиночные примеры ничего не решают, ведь оптимизируется функция ошибки на всей выборке. Вот именно эта способность к анализу на ходу и принятию новых решений (т.е. некая креативность) позволяет нам сейчас более менее успешно водить автомобиль.
arheops
12.07.2016 21:43Ну покажите леопарда и кошку ребенку двух лет и посмотрите чего он скажет. Человек «заподозрит» только если он видел животных такого вида, и знает, что они не умеют притворятся квадратной штукой. Моя дочка, например, говорила «кошка» на все что пушистое, включая пушистые подушки и всех мишек(да, наша черная кошка умеет притворятся квадратным черным предметом). До двух лет и трех месяцев. Потом стала говорить «мишка» на мишек, а еще позже на пушистые квадратные вещи перестала говорить «кошка».
DenerKup
12.07.2016 21:53Честно скажу, что я не специалист по детским мозгам. Мне кажется, что ваша дочка понимала, что это разные вещи, просто ей было сложно запомнить правильные названия. Она же наверняка не относилась к подушкам как к мишкам и кошке? Я сам не видел детей, которые таскают с собой подушку, называя ее кошкой или мишкой, и играются с ней как с игрушкой. То есть тут надо еще этот момент уточнить, часто сложно понять, что у ребенка в голове на самом деле.
arheops
12.07.2016 22:03Так в том то и дело, что для нее не было разницы. Она называла «кошкой» все пушистое. И говорила скользко — на мокрое. Пока ребенок не наберет нужное количество слов, ему сложно обьяснить разницу. Да, гдето с 1.5 года она также приносила мишку на слово «мишка» и отдельно кошку на слово «кошка», но все так же при попытке уговорить называть мишку не кошкой — называла ее кошкой, и говорила, «нет папа, кошка». Не у всех детей такие глюки в обучении словам. Но почти у всех — какието другие. Так и нейронные сети себя ведут, которые можно запустить на обычном железе. Как ребенок 1.5-2 года. Подождите еще чуток, они подростут до 5 лет, начнут предложения правильно строить и, возможно, интересоватся окружающим миром плотнее. Вы от них слишком много хотите пока.
DenerKup
12.07.2016 22:23Подождите еще чуток, они подрастут до 5 лет, начнут предложения правильно строить и, возможно, интересоваться окружающим миром плотнее.
Дело в том, что то, как работает нейросеть, почти ничего общего с человеческим мозгом не имеет.
Сейчас вспомнил самую пожалуй эффектную демонстрацию некоторого «абсурда» в обучении нейросетей: http://www.evolvingai.org/fooling (на странице видео есть, советую посмотреть) Авторы статьи смогли подобрать такие синтетические изображения, на которых нейросеть выдает, например, 99% что это гитара, а на картинке тупо полосы повторяющиеся. Думаю, так сильно ваша дочка даже в самом раннем возрасте не ошибалась :)arheops
12.07.2016 22:40Ну понятно, что она не будет расти как ребенок. Имеется в виду технологии подростут. Говорю же, 10 лет назад о такой вычислительной мощности для нейросетей и не мечтали. Наверно, у вас еще не было детей. В раннем возрасте они очень бестолково ошибаются, куда там нейросетям.
mx2
12.07.2016 22:55Современным нейросетям даже до каких-нибудь кошек невероятно далеко. Да чего уж, банальных насекомых типа таракана или вышеупомянутой стрекозы мы не можем сейчас эмулировать даже близко. Какое вообще может быть сравнение с ребенком?
С тем же успехом можно сказать, что карманные калькуляторы по интеллекту на уровне студентов, ведь интегралы умеют извлекать, скобки расставлять и все такое…
Garruz
12.07.2016 23:34«Вычислительная мощность» != «Способность к мышлению».
«Технологический прогресс» != «Прогресс в алгоритмизации»
Это простейшие аксиомы. По крайней мере, для ныне действующих вычислительных систем…
Vjatcheslav3345
13.07.2016 13:37«Я думаю, что езда на автомобиле может и состоит на 90 процентов из повторяющихся видов из окна, но вот наш мозг в остальных 10 процентах спасает вас от смерти.»
Значит надо продолжать исследования а автопилоты вводить в других сферах — например, морской или речной транспорт, шахты, внутрипроизводственный транспорт, карьерыlingvo
13.07.2016 14:37Нет, как я уже писал выше — эти 10% можно сравнительно легко убрать совершенно иными методами, чем путем совершенствования автопилота до беспредела.
Например можно довести пассивную безопасность авто до того уровня, когда ошибки автопилота будут приводить в крайнем случае только к порче имущества, а не здоровья человеку — всякие капсулы безопасности, другая компоновка, подушки безопасности и т.д. Или законодательно — ограничив скорость движения на дорогах, например, до 80км/ч. Также можно ограничить свободу действий автопилота, разрешая ему движение только в в пределах одной полосы, без опасных маневров, типа перестроений, обгонов с большой дистанцией до впереди идущего ТС и т.д. Медленней, зато безопасней.
QWhisper
13.07.2016 15:51+2Ну вообще эта логика мне лично кажется странной. У нас есть условно 100 ситуаций, человек попадает в аварию в 20 из них. Автопилот попадет в 10, но в других, в которых человек бы справился. Вывод — автопилот плохой, нельзя его вводить. Мне кажется следует оценивать именно аварийность, если у нас аварийность падает с автопилотом в 2 раза, это лучше чем в 2 раза больше аварий, но предотвращены аварии которые могли случиться у автопилота.
kaichik
13.07.2016 19:33Все правильно, так и происходит. Пример — склады, они автоматизируются очень быстро и проекты по автоматизации отбиваются за год-два. Но только там, где нормальная стоимость труда.

Beholder
12.07.2016 23:23+1Если кто-то считает, что компьютерам уже можно спокойно доверять в распознавании изображений и пространства — то для вас есть плохая новость: даже человеку не всегда в этом можно доверять:
Garruz
12.07.2016 23:40То есть, по вашему мнению – машина не сможет решить, круг или квадрат ей объезжать на дороге? Или в реальном мире у них какие-то разные габариты? =))
P.S. Но иллюзия действительно великолепная, не зря получила первое место.
alex3535
13.07.2016 08:57Не согласен со сравнением автопилота и аккумуляторв. У автопилота идет прогресс значительный. АКБ уперлись в физический предел и требуется принципиально другая технология.
Что касается датчиков, то считаю что качество датчиков уже достаточно, железа для обработки уже почти достаточно, дело за эффективным софтом. Тут может обернуться так, что осталась пара тройка тысяч человеко/лет разработки при существующем подходе. Или прорывной вариант с новыми подходами и кучей патентов.

gapel
13.07.2016 11:42+1почему автор решил что первая и третья причина не решаемы? Я специализируюсь на радарах. В том числе на тех, что являются частью систем ADAS. Но я пока подожду статьи автора о датчиках…
и туда же про стоимость. но полностью отходит в первой как бы нерешаемой проблеме.
Короче пока статья выглядит пустой завлекалочкой без полезной нагрузки и характеризуется фразой «есть мнение»
afxwin
13.07.2016 11:50Не согласен с автором.
На всех дорогах, где ПДД разрешают движение транспортных средств с автоматической системой управления движением без участия водителя, установлены радио маяки. Каждый мая имеет свой уникальный номер (GUID), его положение в пространстве жестко зафиксировано. Данный маяк выполняет роль знака для автопилота, маяк может быть ассоциирован со скорость, опасностью, итд. Есть глобальная база данных маяков, которая контролируется ГИБДД. Помимо этого маяк может сам в аварийном режиме сигнализировать об опасности.
Количество таких маяков на кв. км. можно рассчитать в зависимости от ситуации. В городе маяков больше, радиус действия меньше, за городом маяков меньше, радиус действия больше.
Цена: Я прекрасно понимаю, что стоимость создания такой инфраструктуры огромная, но мы говорим про автопилоты! Для автопилота это означает компьютерное зрение аля GPS но гараздо более детальное. Дешевле чем локаторы.
Далее про 80 на 20. Не стоит думать однобоко! Давайте представим, что есть дороги которые специально выделены для движения автопилотируемых транспортных средств. В таком случае, когда машина понимает, что на дороге есть только она, другие такие машины и возможно случайные прохожие, с точки зрения машины мир превращается в NFS (извините за грубое сравнение). На таких дорогах даже светофоры будут не нужны. А среди всех объектов на дороге (учитываем, что машины «видят» и идентифицирую друг-друга) выделить человека либо животное и предотвратить столкновение с ним становится тривиальной задачей. И проглядеть столкновение, как человек читающйи СМС, такой автомобиль уже не сможет.
Не стоит пытаться наложить на шаблоны прошлого, что-то сверхсовременное, это сравнимо с решение проблемы движения Ламбаргини по брусчатке XIX века!kaichik
13.07.2016 11:57Да что все так любят инфраструктуру? Что-то российской, стройка — это монументально, понятно, пощупать можно). А еще это огромные капексы на старте, необходимость обслуживать и высокая цена ошибки. Маяки — тупиковый путь, много раз обсуждалось, и выше — тоже. BLE могут использоваться только для повышения точности позиционирования, но не как индикатор, эппловский патент на эту тему пролетал недавно.
Отдельные дороги для автопилота не строят, потому что тогда у проекта в целом нет экономики. А без ТЭО никто и доллара не вложит в них.
И никакой маяк не решает проблему предотвращения столкновений, забудьте уже наконец об этом.QWhisper
13.07.2016 15:56Дорог когда то тоже не было, не было трасс и города были маленькие, и была эра электромобилей, бензин было проще возить с собой чем где то найти, а потом двс вылечили от детских болячек, построили дороги, заправки и вот он мир перед вами. Так что сначала вон римляне построили инфраструктуру для лошадей и быстрой доставки почты, со сменами, сеном и постоялыми дворами. Потом построили асфальтированные дороги, натыкали заправок и закусочных. Если это сделали, то почему вам кажется странной идея, что в знаки могут встраивать маячки для беспилотников(не касаемся технологии)?
kaichik
13.07.2016 19:35Потому что проще поставить просто знак, который можно распознать. Всегда держите в уме стоимость и технологичность решения. Огромное количество изобретений не доходят до воплощения просто потому что стоимость внедрения не оправдывает эффекта. Вот с маяками пока такая история.
QWhisper
14.07.2016 09:35Ну и почему тогда RFID метки вешают даже на продукты, а в некоторых магазинах еще и тележка вся автоматом посчитается? Дешевле же штриходы тупо и все? Если цена знака 100 рублей, а метки 0.5р то разница не значительна.
kaichik
14.07.2016 20:37А почему машину бензином заправляют, а посудомойку — электричеством? Потому что для каждой ситуации оптимальным является свое решение.
Ключевые минусы меток применительно к дорогам: небольшой радиус действия (десятки метров), необходимость питания (пассивные метки придется облучать с машин черт знает какой мощностью), ненаправленность. Представьте себе в центре города куча знаков и светофоров с метками, каждая из которых в радиусе 100 метров транслирует свой айдишник. Да вы даже примерно не поймете, где что находится, у машины мозг взорвется.
afxwin
13.07.2016 17:12Спасибо за Ваш комментарий.
В 19 веке никто и подумать не мог, что вместо лошадей по брусчатке будут ездить современные авто, по специально построенным магистралям с миллионами дорожных знаков.
Лет 15 назад, обладатели Nokia обсмеяли бы смельчака, который попытался бы пофантазировать про смартфон размером 5 дюймов и запасом энергии на 16 часов и единый магазин для всех приложений.
Сегодня с тродом верится в будущее электромобилей, нефть правит миром.
«Да маяк не моежт», «да это все глупости» — это всего лишь мнение обывателя, без подкрепления фактами. А все то, что написал я — не что иное как субьективная фантазия!
Посмотрим, время покажет…saboteur_kiev
13.07.2016 17:56«Сегодня с тродом верится в будущее электромобилей, нефть правит миром.»
Ну вот это вы уже загнули. То, что нефть на исходе в весьма обозримом будущем уже не просто верится, а известно как факт.
Есть некоторая вероятность, что вместо электромобилей будут авто на водороде или еще каком-то альтернативном варианте, но электричество — на текущий момент один из самых развивающихся вариантов.
kaichik
13.07.2016 19:37Спасибо за ваш ответ.
То, что маяк не может выполнять нужный вам функционал — мнение меня как человека, который немного разбирается в тематике, и мнение индустрии, которая до сих пор никак эти маяки не использует.
Прогресс шагает по дороге, никто не спорит, но маяки пока на обочине.QWhisper
13.07.2016 22:36Ну а чем вам маяк не нравится, как знак только в кибер пространстве он легко может работать, гигантская RFID метка например, не гадит в эфир и дальность действия метров 10-20 в большинстве случаев достаточна. Знаки не стоят через каждые 10 метров(ну бывает и стоят, но тогда их в один можно объединять). Причем стоимость RFID может выйти весьма копеечной, зато будет уже 100% распознавание, тут и человекам поможет, не будет уже ни каких внезапно появившихся знаков которые поставил наряд ДПС рядом. Будет конкретный знак с конкретным ID и конкретными координатами установки. Так же можно пометить и переходы со светофорами, уже значительно легче станет с распознаванием.
kaichik
14.07.2016 20:45Метка не гадит в эфир, в него будет гадить считыватель. Вам придется делать считыватель с определенной и узкой диаграммой направленности, чтобы не цеплять метки в стороне. И это не даст вам возможности видеть метки за поворотом, например.
Придется содержать общую базу меток, а кому-то следить за ее корректностью и обновлением. Но если вы и так берете данные о метках из единой базы, то не проще ли занести в нее координаты конкретного светофора или знака, как это делется сейчас с навигацией?
Но они не обновляют карты каждый день. В общем, очень тяжело получается и громоздко, а для чего — не ясно.QWhisper
14.07.2016 21:36Окей, поставьте ИК ответчик, или диод который мигает на определенной частоте в определенном спектре. Решения аналогичного уровня стоимости. Вон столбы для освещения уже ставят с солнечными батареями. А тут датчик максимум размером с ладонь сунуть.
И сейчас службы ведут учет знаков, просто будет более систематизированная работа, самим службам лучше станет.LittleSquirrel
14.07.2016 21:46+1А, простите, зачем? Обычный знак сейчас вполне себе распознается камерой и удобен и привычен живому водителю. Если же использовать маяк как опорную точку для определения своего местонахождения то все равно нужны сенсоры и промерять расстояние до этого самого маяка.

yuklimov
13.07.2016 14:59+1Интересно было бы сравнить развитие автопилотов у автомобилей с автопилотами, например, в авиации, которые прошли достаточно большой путь. Но пилоты до сих пор остались: они контролируют автоматику, автоматика контролирует пилота. В хороших погодных условиях (те самые ~80%) — автопилот может полностью сам вести самолет. Однако есть условия, в которых автопилот не справляется, и тогда в дело вступает человек. Чтобы не потерять навыки для этих ~20% случаев приходится время от времени пилотировать в хороших условиях в неавтоматическом режиме.
Возможно, у автомобилей будет примерно тоже: в идеальных условиях (автобаны в хорошую погоду) автопилот полностью заменяет человека (и если ситуация не стандартная, то просит помощи у человека), а в других условиях — помогает человеку не допустить ошибки (как сейчас парктроники и т.п.).
Еще наблюдение. Чем больше автоматизации, тем обученней должен быть человек, чтобы понять, что автоматика не справляется. И человеку нужно постоянно следить за автоматикой, чтобы не пропустить тот момент, когда автоматика отказала, как в случае с Теслой. Так что если полные автопилоты и будут, то всех обучить их контролировать экономически неоправданно, поэтому IMHO их придется контролировать сверху (типа как автоматические ж.д. поезда). Но посмотрим.ploop
13.07.2016 15:15+1В хороших погодных условиях (те самые ~80%) — автопилот может полностью сам вести самолет.
Во-первых, он давно сам и водит самолёт, на плечах пилотов только взлёт/посадка на необорудованных автоматикой аэропортах. Если аэропорт оборудован автоматикой, то доступен полный цикл полёта без участия человека, хотя пилоты редко это практикуют.
Во-вторых, в плохих погодных условиях автопилот тоже может быть эффективнее, например при плохой видимости. Слышали наверное, «видимость плохая, иду по приборам» — старинная фраза, когда автопилотов ещё не было, но по сути человек им являлся, выполняя тупую прослойку между приборами и рычагами управления.
В третьих, (и самое важное) автопилот в авиации это не какой-то мифический чёрный ящик, а десятки систем, которые отдельно включаются/выключаются на автоматическое управление. К примеру, вы можете включить на автомат только поддержание скорости, или тангажа, или комбинацию каких-то параметров, управляя остальным вручную. Так что пилот как-бы нужен для управления всем этим делом, но с другой стороны все эти независимые системы вполне могут работать в связке.
А с автомобилем так не выйдет.
yuklimov
13.07.2016 15:38+1Всё ж до сих пор полных автопилотов для самолетов (самолетов без пилтов) нет — значит есть какие-то трудности. Те же трудности будут ожидать и автомобили.
1) Все же пилота удалить из кабины не получается. Он контролирует автопилот, и в каких-то условиях, когда автопилот перестает справляться, берет управление на себя. Решение и ответственность на пилоте, а тот или иной автопилот — его помощник, пользованием которого он обучен.
2) Приборы — это хорошо. Но за частую они только передают информацию (скажем, как метеорадар), а анализировать ее и принимать решение (скажем, как лететь через грозу) — приходится пилотам. Это не тупая прослойка ;) — распознавание и анализ ситуации еще не всегда автоматизировано.
3) Собственно, ровно как в машине: хочешь, включаешь круиз контроль, хочешь — адаптивный, хочешь — слежение за разметкой и движение по полосам, и т.п. Но это всё системы, поведение которых водитель понимает. Соединение в связку — сложность системы резко возрастает и ее поведение перестает понимать водитель. Тогда либо его специально обучать (как пилотов самолетов, поездов, операторов различного типа станций, ...), либо выкидывать из машины и заменять внешним контролирующим оператором (без которого пока ничего не обходится).
Посмотрим, что выйдет ;).lingvo
13.07.2016 16:25>>> Всё ж до сих пор полных автопилотов для самолетов (самолетов без пилтов) нет — значит есть какие-то трудности. Те же трудности будут ожидать и автомобили.
Но уже есть поезда без машинистов. И они реально ездят.yuklimov
13.07.2016 16:50Поезда проще машин (едешь по рельсам, никто не подрезает, не выбегает на дорогу и т.п.). Но и автоматические поезда контролируют операторы из диспетчерской.
kaichik
13.07.2016 19:39У поезда меньше степеней свободы, им проще управлять. Как ни странно, самолетом в определенном смысле тоже легче управлять, он один летит, без ста самолетов вокруг.
Кстати, раз уж о самолетах — трафиком до сих пор управляют диспетчеры, а не компы.

Tachyon
14.07.2016 14:49Вся ситуация с «Автопилотом» Tesla напоминает хотьбу по льду- вроде бы и пройти теоретически можно, но где провалишься неизвестно. Поэтому по льду тонкому никто не ходит. Думаю что такой пример должен образумить производителей встраивать подобные системы в автомобили под видом Автопилота. Ведь это не более чем та-же ABS — есть на многих машинах, помогает иногда, но постоянно ей кто-нибудь пользуется, в смысле её срабатывания? Она для экстренных ситуаций, и никто в пол тапок не давит до тр-трр-тр когда препятствие лишь на горизонте. Вот так и помощник водителя не причина ваобще не управлять автомобилем.
artyfarty
14.07.2016 19:30Я вот часто задумывался, даже допустим если все проблемы решат, останется одна. Никто не позволит сделать "агрессивного" робоводителя. Подымут такой вой, что мир содрогнётся. А неагрессивный просто не съедет со съезда в пробку никогда, и будет еще задерживать весь поток за собой.
А вот от таких съездов больше всего устаёшь. По магистрали я и сам с удовольствием прокачусь.
ploop
15.07.2016 12:22допустим если все проблемы решат
А неагрессивный просто не съедет со съезда в пробку никогда
Когда решат все проблемы, пробок тоже не будет.artyfarty
15.07.2016 22:42Я в этом не уверен. В конце концов если для управления машиной не нужны будут права, их будет становиться только больше, а вот дороги наращивать бесконечно не получится.
dmitry_ch
15.07.2016 15:04+1Я бы предпочел вариант, когда «я выехал на автобан, нажал кнопку, и до конца дороги по бану отдыхаю, а все авто на автобане общаются друг с другом и решают совместно, как они все поедут и друг друга не заденут».
Потому что такое движение давало бы простоту езды на большие расстояния, особоенно по незнакомым дорогам. А как по сложным улочкам городов кататься — так лучше я руками порулю.
У этого подхода один плюс: я каждый раз будут точно знать, кто ведет машину. На автобане комп справится получше человека, так что ему верить можно, а вот в городе верить в него страшновато, и от того лучше и не начинать. Это мое мнение, но оно мне кажется разумным для лично моего использования. И это лучше, чем постоянно ждать, ошибется или нет робот.
Дальше ведь больше будет. Пока такие дорогие машины в Замухрищенск редко заезжают, так что и проблемы странных дорог их мало касаются. А как массовость автопилоты наберут, ой начнут сходить с ума от таких «красот»:

Притом, уверен, не только Россия славна такой разметкой )
zim32
Не получилось бы с этими автопилотами как в свое время с 3д телевизорами
alltiptop
Можно пример 3д телевизора? Всегда было интересно, без огромных стёкол с 3 проекциями и разных зеркал.
Deaddy
Видимо, имелось в виду сокращение выпуска телевизоров с поддержкой 3d. Эта фича оказалась никому не нужной, хотя очень красиво смотрелась в рекламе.
black_semargl
не то чтобы не нужной… просто нет контента в достаточном количестве.
ploop
Да полно контента, но судя как по своим знакомым, так и по себе (не говоря уже о интернет-опросах) эта функция включается только на «побаловаться» после покупки девайса. Да и выбирают покупатели девайс не из-за поддержки 3D, а по другим характеристикам, 3D к ним до кучи приплывает.
Банальный индикатор: посмотрите на количество пиров на трекерах на один и тот же фильм в 3D и просто в хорошем 1080. И это не из-за слабой распростанённости девайсов, ведь даже 4К-контент тянут лучше, чем 3D
rude
единственное применение которое я нахожу в современном 3D телевизоре, — это возможность играть на приставке вдвоем, при этом у каждого видно свой экран. но опять-таки, мало игр которые поддерживают данную технологию и это точно не повод покупать телевизор с 3D
Rifal
Ого, ни разу такое не слышал! Нет ли примера поддерживаемых игр или какой-нибудь статьи на эту тему?
rude
тут есть некоторые подробности от LG: http://blog.lge.ua/2012/05/30/o-sekretax-sistemy-dual-play/
Cryvage
Только из-за этого и брал 3d телевизор.
UncleStark
Dual Play не должна поддерживаться игрой, игра всего лишь должна уметь разделять экраны игроков вертикально или горизонтально, этого будет достаточно для любого поддерживающего технологию телевизора. А ещё, я открою секрет, что для не поддерживающего тоже. Телевизору вообще пофиг игра там или фильм, главное очки себе с другом склеить правильные
rude
все верно. нужно что бы игра поддерживала split-screen. но опять-таки, не все игры этот режим поддерживают.
статья о dual play от LG просто объясняет как это работает
Alexey2005
Похоже, что для полноценного восприятия 3D необходим очень большой экран. Почему-то с 3D-телевизорами не возникает того вау-эффекта, который возникает в 3D-кинотеатрах.
tmin10
Да вроде эффект есть и заметный, в кино тоже не в каждом фильме нормально 3д чувствуется.
truggvy
Эффект сильно зависит от конкретного человека. Сам некоторое время назад купил 3D телевизор 32'' и с удовольствием смотрю 3D фильмы. Даже пересматриваю некоторые относительно старые, которые раньше видел в 2D. Приятель зашел в гости, заценил и тоже загорелся идеей покупки. Сказал: «Да это ж круче чем в кинотеатре! Изображение четче и глаза не устают!». Хотя когда я сам решал брать/не брать, то конечно тоже читал кучу отзывов в стиле «поигрался и забыл».
Corwinian
Да в кинотеатрах его тоже особо нет. Поэтому радует когда фильмы выпускают не в 3д, это куда приятнее
madf
нет, полезная вещь, только и смотрю фильмы в 3Д
в дополнении с звуком — улёт! круче чем в любом кинотеатре (том же имаксе)
Zharv
+1, если собираемся с женой смотреть кино то первым делом ищу 3Д.
55" 4К и реально перевес в пользу 3Д, у знакомых у которых 1080 как раз наоборот все.
ploop
Да понятно, на вкус и цвет, вот только тем, кому реально нравится — меньше. Остальным либо пофигу, либо просто неприятные ощущения.
madf
проблема тут только в цене
менталитет в России один, лучше я на торренте скачаю, следовательно лицуха не дешевая на взлёте продаж и не всё есть
так же само оборудование не из дешевых, не каждый может для себя понять, зачем покупать: ТВ + ресивер + акустику (весь набор), да и разбираться/настраивать всё это надо.
Stalker_RED
Контента хватает, чтобы смотреть 3D фильмы пару раз в месяц.
https://en.wikipedia.org/wiki/List_of_3D_films
У меня вообще складывается впечатление, что сейчас 3D фильмов снимается больше, чем «обычных».
ploop
saboteur_kiev
С точки зрения прибыли, для домашнего просмотра 3D оказалось экономически невыгодно.
Поэтому в основном 3Д снимают для проката в кинотеатры, а для домашнего просмотра обычное 2D.
Скажите честно, вы все 3Д фильмы купили?
Stalker_RED
Ни одного не купил, у меня вообще телевизора нет.
DjinNO
Лично у меня функция 3D простоивает, но зато с ней есть возможность играть в DualPlay (В телеках LG функция, когда на одном экране в разных очках разное изображение) и это реально удобна и полезная штука, особенно в гонках
alltiptop
Они вообще выходили? Тот «3d» что показывают в рекламе — такой же как круиз-контроль — автопилот.
Calc
мне кажется что вопрос в цене.
За цену одного 3д телевизора в 40 дюймов можно купить 3 таких же без 3д.