

Первая часть обзора проблем автопилота отлично зашла и время двигаться дальше. Жизнь не стоит на месте и «Теслы» все так же бьются (Tesla Model X тоже, но пока без помощи автопилота). Что не так с датчиками систем ADAS? И почему в ближайшие годы ничего кардинально не изменится?
Многие, как ни удивительно, приблизились к своим физическим возможностям. Об этом можно говорить уверенно, потому что перечисленные ниже системы используются не только на автомобилях и имеют крупные рынки сбыта за пределами автомира. Это большие деньги, миллиардные бюджеты на R&D и достаточно медленный прогресс.
Теперь подробнее.
Видов датчиков — как пальцев на руке, пять:
- камеры,
- радары,
- лидары,
- ультразвук,
- инфракрасные камеры.
Классификация выбрана для удобства, а не соблюдения технологической правды. Вообще делить можно по-разному:
- пассивные (камеры) и активные (радары-лидары),
- в видимом диапазоне (камеры) и нет (все остальные, в том числе ИК),
- по частотам (от ультразвука к лидарам).
Все перечисленные датчики сильно отличаются по своей природе и выдают в электронный мозг разную информацию.
Что важно знать о рынке в целом?
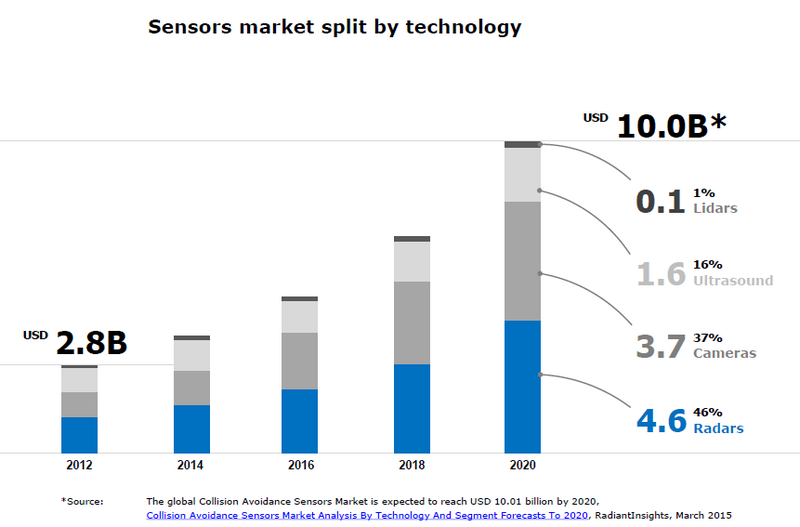
Оценки разнятся, но порядок одинаков. Баланс перекошен в пользу камер и радаров, которые на двоих занимают 85 процентов рынка в деньгах. Лидары остаются нишевым решением (только если не случится прорывов), а ультразвуковые датчики не могут выйти за рамки своей ниши и прорывов, опять же, не видно. Системы ночного видения теряются даже на фоне лидаров.
Теперь подробнее.
КАМЕРЫ
Работает так: получили картинку мира в видимом диапазоне, обработали (отдельные кадры и последовательность), распознали.
Плюсы:
- Только камеры могут распознавать дорожную разметку и знаки.
- У камер хорошее разрешение по углу, то есть камера хорошо «понимает» объекты, которые двигаются поперек движения автомобиля (переходящий дорогу пешеход).
- По картинке с камеры возможна прямая классификация объектов («собака»-«ребенок»-«взрослый»-«велосипед»-«машина»-«грузовик»).
- И, конечно, камеры доступны по цене — от нескольких сотен долларов для покупателя.
Минусы:
- У камер плохое разрешение по дальности, они с трудом понимают расстояние до препятствия или скорость сближения (стереокамеры отчасти решают проблему).
- Нет прямого измерения скорости объектов, ее можно понять по серии кадров, и все равно измерение нечеткое.
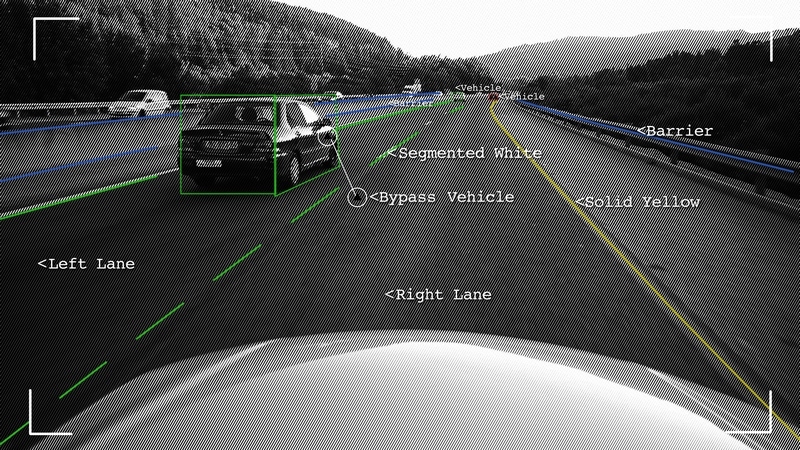
- Сильно влияние погодных и дорожных условия — пресловутый «белый фургон на фоне яркого неба» в недавней аварии.
- Обработка данных с камер занимает время: задержка тем больше, чем сложнее система камер.
Рынок вытоптан слонами от Intel и NVIDIA до Mobileye и Magna International. Стартапов очень много, порог входа низкий. Развитие технологии упирается в скорость и качество обработки данных, то есть в процессоры и алгоритмы. Кардинально увеличить скорость обработки не получается, а прорывные алгоритмы ничего пока не прорвали.
Вывод:
Без камер на автомобиле всё равно не обойтись.
РАДАРЫ
Работает так: излучили на сверхвысокой частоте, послушали что вернулось, сразу узнали дистанцию до препятствий, их скорость и углы на них.
Плюсы:
- На работу радаров намного меньше влияют погодные условия, вообще не влияет цвет объектов и освещенность.
- Хорошая разрешающая способность по дальности и скорости, доступно прямое измерение дальности и скорости с хорошей точностью.
- Мгновенная (1/20–1/50 секунды) обработка данных, что особенно важно для высоких скоростей.
- Возможность легко накапливать и анализировать информацию в динамике за счет небольшого объема информации. По той же причине подходит для V2I/V2V
Минусы:
- Не дешевле, а часто и дороже камер. Дороже 1000 долларов за дальний радар.
- Плохое разрешение по углу (радару сложно понять движение поперек).
- Нет прямой возможности классифицировать препятствие или оценить его габариты.
- Сильная зависимость дальности от угла обзора. Если светим далеко и узким лучом, не видим помехи над дорогой и по сторонам. Светим широко — получаем небольшую дальность.
На рынке слоны, только с другими названиями — Bosch Global, Delphi, Smartmicro. Стартапов почти нет, порог входа очень высокий за счет дороговизны оборудования под разработку СВЧ. Методы обработки мало изменились за последние 50 лет, вложения в разработку и организацию производства компонентов (как антенно-фидерного тракта) измеряются сотнями миллионов евро. Доступные и качественные трансиверы, без которых вообще не сделать массовое решение, производят пяток компаний на весь мир. Радары плавно совершенствуются, но развитие занимает десятилетия.
Вывод:
Сильные стороны радара — слабые стороны камеры и наоборот. Без радаров тоже не обойтись.Не я придумал, а господин Маск:
“…That said, I don’t think you need LIDAR. I think you can do this all with passive optical and then with maybe one forward RADAR… if you are driving fast into rain or snow or dust. I think that completely solves it without the use of LIDAR. I’m not a big fan of LIDAR, I don’t think it makes sense in this context.”

ЛИДАРЫ
Лазерные дальномеры: посветили лазером, посмотрели, что вернулось, выдали массив точек с расстояниями до них.
Плюсы:
- Вундервафля, видит всё вокруг подробно и с высокой точностью. Кроме них так никто не умеет и никогда не будет.
Минусы:
- Сканирующие лидары видят один и тот же участок дороги всего два-три раза в секунду.
- Высокая стоимость, нет — СТОИМОСТЬ лидара.
- Еще лидары хрупкие.
- Короче, все остальное — минусы
На рынке есть крутые игроки — Velodyne LiDAR, Quanergy, Sick. Все решения сравнительно молодые, стартапов несколько штук, но сравнительно крупных. Действительно крупных игроков уровня Bosch с выручкой на automotive-направлении в десятки миллиардов на рынке нет и уже не будет. Со снижением стоимости лидара и отказом от движущихся частей катастрофически падают возможности и нужность лидара тоже. Все ждут решения за 250 баксов, но его что-то нет.
Просто и понятно: автомобильный рынок лидаров в сто раз меньше рынка радаров или камер, а у тех полно и других применений
Вывод:
Пока не случилось революции, лидары останутся нишевым решением. Хорошо для прототипирования, никак для серийного автомобиля. Да и для прототипирования плохо: заточенная под лидары логика плохо адаптируется к другим датчикам.
УЛЬТРАЗВУК
Хорошо знакомые парктроники: излучили высокочастотный сигнал, дождались пока вернется, посчитали время.
Плюсы:
- Очень дешево, сотня-другая долларов за систему из нескольких датчиков
- Датчики легко объединяются.
- Технология отработана и понятна, можно экспериментировать даже дома на arduino.
Минусы:
- Дальность ограничена единицами метров.
- Нет возможности понять угол на объект или прямо измерить скорость.
- Низкая достоверность данных.
Ны рынке царствует китайский noname, поляна давно вытоптана, желающих вложиться в новые проекты немного. Стартапов мало, но есть например Toposens, который делает крутую вещь на ультразвуке, но что-то внезапно начинает делать радар тоже.
Вывод:
Как только радары и лидары научатся хорошо отрабатывать ближние расстояния, ультразвук только для arduino и останется. Шутка:).
ИНФРАКРАСНЫЕ КАМЕРЫ
Как работает: посмотрели в инфракрасном диапазоне, проанализировали изображения на матрице.
Плюсы:
- Хорошо заметны горячие человеки и лесное зверье.
Минусы:
- Дорого, пара тысяч долларов только за фронтальную камеру
- Узкая сфера применения
- Ограничения по температурам использования.
Вывод:
Еще более нишевая история, чем лидары. Радары с лидарами выкинут их с автомобильного рынка уже совсем скоро, если еще не.А теперь — сладкое. Подытожим:
- Ни один датчик или система датчиков не могут стать универсальными. Если говорить о роли единственного в low-end решениях — это камеры. Во вторую очередь — радары.
- Любая система ADAS и тем паче автопилот будут использовать систему из несколько датчиков. Это называется sensor fusion и в первую очередь будут совмещать камеры и радары. Подозреваю, ими и закончат.
- Чем больше разнородной информации хочется собрать, тем дороже это стоит (полбеды) и тем больше времени это занимает. Чем дольше обрабатываем, тем медленней мы должны ехать, чтобы это было безопасно. Отсюда черепашья езда большинства автопилотов и любовь к хорошей погоде.
И это еще не все. Скоро поговорим о проблемах реального мира, то есть инфраструктуры.
Комментарии (239)

lasalas
18.07.2016 10:06+3Вот опять. Существующий датчики сравниваются с неким всевидящим-всеведующим идеалом. А сравнивать надо с выглядывающими из-за стоек, очков и занавесочек двумя весьма посредственными по разрешению белковыми «камерами» с плохими углами, которые, к тому же, постоянно отвлекаются.
maxpsyhos
18.07.2016 10:17+10К этим «весьма посредственными по разрешению белковыми камерами» в комплекте идёт отличный распознаватель образов, которому этой картинки хватает, а искусственным распознавателям до него пока как до луны. Кроме того, они могут и поворачиваться и перемещаться в пространстве для выбора удобного ракурса, а датчики к машине прибиваются намертво, иначе ещё дороже и сложнее выйдет.

Shadow_Runner
18.07.2016 10:51+2Вывод — самый простой вариант эффективного автопилота это стереокамеры и мозг в резервуаре подключенный к управлению автомобилем)

Halt
18.07.2016 12:13+14«Мозг в резервуаре, подключенный к управлению автомобилем» обычно называется «водитель».

kaichik
18.07.2016 13:11Датчики автопилота должны превосходить человека, вот в чем загвоздка.
Главные направления, которые человек не «ловит»: обзор на 360 градусов, плохие погодные условия или ночь, движение с высокими скоростями.AllexIn
18.07.2016 15:15Да не должен автопилот превосходить водителя.
Если автопилот будет на дороге только с другими автопилотами — от него будет требоваться в десятки раз меньшая универсальность чем от человека-водителя.
Все современные проблемы автопилотов от желания запихать автопилот на одну дорогу с человеками.
А всего-то надо вводить выделенные скоростные линии на которых запрещено вождение человекам. Лет за 10 все авто будут с автопилотами ради желания ездить по выделенной линии. А через 20 можно будет вообще убрать из города человеков.kaichik
18.07.2016 22:14Это утопия, так сделать невозможно. Единственная скоростная линия, которая работает в современном городе — это метро.
AllexIn
18.07.2016 22:15ТАк сделать невозможно потому что…?
kaichik
18.07.2016 22:56+1Потому что возьмите карту современного города (только не Детройта, а там Парижа, Москвы, Рима или NYC) и попробуйте прикинуть, где физически будут находиться те самые скоростные выделенные линии.
AllexIn
18.07.2016 23:57На месте платных дорог. Их полно, особенно в США.
Не говоря уж о том, что с ростом количества автопилотов под них можно будет отдавать все больше обычных дорог, т.к. загруженность обычных дорог будет падать. Причем для функционирования потока X на автопилоте, достаточно дорог которые в обычных условиях обслуживают лишь 0.5*X потока.AllexIn
19.07.2016 00:07Цифра 0.5 условная, естественно.
kaichik
19.07.2016 09:57До выделенных линий на фривее еще нужно будет добраться — то есть в городе, в пригороде, даже на развязках фривеев автопилоты будут стоять вместе со всеми. С тем же ограничением скорости (а автопилот пока вообще не готов к большим скоростям) решение ничего не даст с точки зрения экономии времени.
Те, кто не ездят много по фривеям, вообще ничего не почувствуют.
В качестве примера можно взять электромобили, им же разрешают ездить по полосам для общественного транспорта и парковаться бесплатно. Не слышал, чтобы это как-то всерьез работало.AllexIn
19.07.2016 10:00Вы описываете примитивные проблемы, которые вполне решабельны.
Не интересно их обсуждать, потому что всегда можно накидать тыщу проблем и пока для всеё тыщи решение не предложишь — тебя будут убеждать, что задача не реализуема.
Я, лично, под термином «утопия» подразумеваю фундаментальные проблемы, которые невозможно решить. Вы же всякую мелочь в пример приводите. Это не проблемы уровня «утопия». Это проблемы уровня «да есть, надо подумать как с ними быть».
AndrBell
20.07.2016 10:29Наверное практически (уже) можно было бы выделить полосу на highways для автопилота. (Полос обычно не менее 2 + обочина слева и широкая обочина справа, которую можно превратить в полосу).
Проблема остается для въезда выезда (exit) на магистраль…
На мой взгляд можно в ПДД ввести пункт, что обычные водители уступают безоговорочно (т.е. должны во избежание аварии) автопилоту, как «спец. машине с включенными маяками и звуком».
На первое время можно ограничиться несколькими такими дорогами, заканчивающимися стоянками только для автопилотных машин, где стоянка оборудована всеми «штучками» для автопилотов с целью помочь им быстро парковаться.
Скорее всего такое реализовать можно только на хороших дорогах (разметка! и ямы!), с более или менее дисциплинированными водятлами. Хотел бы не говорить ничего против России, но увы, это не для России. И наверное не для Европы, где часть дорог в горах и с одной полосой(?). Остается пока Сша/Канада…kaichik
20.07.2016 10:38А теперь скажите, чего ради устраивать представление, которое создаст проблемы всему движению. Зачем нужна технология с таким количеством костылей? Цель какая?
И вас вероятно удивит процент магистралей (тех самых, в несколько полос, с обочинами и разделителям) в США. Таких дорог всего 1,2% от общей протяженности.AllexIn
20.07.2016 12:01Цель — убрать водителей-людей с дороги. Очень благородная цель, приведет через 20-30 лет к уменьшению смертности от ДТП на несколько десятков тысяч в год. Если для вас это ерунда… Хм, ну ок.
kaichik
20.07.2016 12:41Так запретите дорожное движение, вы не десятки тысяч, вы больше миллиона ежегодно спасете.
Я о конкретной ситуации: как появление выделенных полос и некоей неуниверсальной технологии приведет к снижению смертности.
Весь смысл и эффект автопилотирования в использовании существующей инфраструктуры, в минимальных затратах на запуск. Даже те миллиарды, которые вкладывают сейчас в сами автомбили частные компании — это пшик по сравнению с затратами, которые потенциально понесут государства на выделенную инфраструктуру.
kaichik
20.07.2016 10:33Понятная позиция, «я не тактик, я стратег» :)
AllexIn
20.07.2016 11:33Я не готов обсуждать мелкие проблемы.
Потому что их можно высасывать пачками.
Позиция «стратегия, а не тактика» выходит из самой постоновки проблемы «нереализуемая утопия». Т.к. такая постановка предполагает фундаментальные пробелмы стратегического, а не тактического уровня.

Terranz
18.07.2016 13:52шёл далёкий 1997 год
роза для киборгаНа компьютерной консоли бешено замелькали разноцветные огни. Из-за полупрозрачной матовой перегородки раздался сдавленный стон.
Тея отшвырнула ширму и застыла.
Под пластиковым колпаком лежал подросток. У него была непропорционально большая голова и жирное тело с практически атрофированными конечностями. На лысом черепе виднелись розетки для подключения биоинтерфейсов. В прозрачный пластик была впаяна табличка:
…
«Биологическая навигационная система Артур-1».
Tenebrius
18.07.2016 13:10Кроме зрения человек может использовать слух и вестибулярный аппарат. Так что бионическая система тоже довольно сложная и разнообразная.
unclejocker
18.07.2016 13:10+2У меня для вас плохие новости:)
На некоторых тестовых выборках (на которых проводятся соревнования между алгоритмами) системы распознавания образов уже обошли человека.
К примеру, на object detection на ImageNet в прошлом году у алгоритмов ошибка была 3.6% а у белковых систем 5.1%.
Это конечно все олимпиадные задачи, но и в реальной жизни прогресс хорошо идет.
f1inx
18.07.2016 13:56Это больше напоминает ошибку других белковых систем, которые делали классификацию для данных валидации, посмотрите сами:
sceneparsing.csail.mit.edu/browse.php/?dirname=validation
В общем причин для паники пока нету.
Сама по себе ошибка порядка 3-5% это ужасно. Это становится, понятно когда начинаешь понимать в чем разница между ложноположительными и ложноотрицательными…unclejocker
18.07.2016 14:44Пойнт в том, что люди тоже ошибаются и на данный момент ошибаются уже чаще.
f1inx
19.07.2016 15:39Это утверждение я как раз и оспаривал.
Ошибки в данных для валидации там, а не в некоректной классификации белковыми системами на валидирующей выборке.
Нанятые индусы при классификации накосячили, или спустя рукова ее делали.
В среднем люди пока ошибаются на порядки реже. Особенно с зашумленными сигналами.
Однако не спорю, что в «некоторых специфических сферических условиях» машинное зрение работает сравнимо или лучше.
Zolg
18.07.2016 10:28+3Вы не путаете ИК камеры ближнего ИК («посмотрели в ИК-диапазоне, перед этим подсветили ИК-прожектором», дешево) с тепловизорами («хорошо заметны горячие человеки и лесное зверье», дорого)?
Roboserv
18.07.2016 10:43+1Все так, вот только про ЛИДАРы зря так, что мол скоро не нужны будут. Их цена, как и все в в сенсорике — падает экспоненциально. 2д лидары уже можно купить за 1к евро.

qbertych
18.07.2016 12:13Кстати да. А с девайсами пошустрее можно вот такие чудеса на дронах вытворять.
Roboserv
18.07.2016 12:16Да, именно эти Hokuyo я и имел в виду, у нас они в роботе стоят в универе. И видео из универа КИТ, куда меня брали, но я решил пойти в другой :) Ирония судьбы.

madfly
18.07.2016 11:38+1Вот почему бы дополнительно не оснащать автомобили системой, которая будет вещать в эфир на 100 метров вокруг свои основные характеристики — габариты, скорость, направление движения, в идеале, координаты GPS. Даже без ИИ это могло бы уже повысить безопасность движения за счёт предупреждения водителя о потенциальной опасности. И стоит копейки. И автопилот бы срабатывал надёжнее.

DMGarikk
18.07.2016 11:53+1А потом выпустить устройство которое создаёт мусорные сигналы на тойже частоте… и будет полная мешанина на дороге
я уж молчу про приватность при использовании подобной системыHalt
18.07.2016 12:20Самолеты и суда поголовно оснащаются подобной системой и ничего не падают пока.
В любом случае, это должен быть еще один канал информации, который можно учитывать или игнорировать.DMGarikk
18.07.2016 15:45+2Среди пользователей самолётов случайных людей очень мало, плюс строгая сертификация самих самолётов и их протоколов взаимодействия.
с судами попроще, но в целом ситуация схожая… но там только по прибором не сильно то и плавают, и интенсивность движения не аналогична автомобильной. да и в кустах сидеть с генератором искусственных кораблей никто небудет за неимением таких кустов в море.
а вот парализовать движение в мегаполисе поставив пару генераторов ненатоящих авто можно будет раз плюнуть и будет очень сложно их вычислить
kahi4
18.07.2016 16:07Помешает сделать это то же самое, что и мешает сейчас кинуть дымовую шашку на перекресток. Только что-то никто особо их не кидает. Опять же, цифровая подпись крайне усложняет подобную систему (точнее, позволяет упростить поиск преступника, да и при некой единой сети позволяет решить эту проблему).
DMGarikk
18.07.2016 16:13+2дымовая шашка сильно не мешает, мимо проехал (ветер изменился) и всё нормально. к томуже очень хорошо видно кто её кинул.
угонщики вполне сканят сигналки не привлекая внимания… а как хорошо, включил глушилку и уехал… а за тобой никто проехать не может т.к. пробка непроходимая, только руками расталкивай
а уж угонщику милое дело даже с валидной подписью наделать глушилок, у них такого барахла навалом будет
внесение возмущений в навигационную систему которая контролирует движение хотябы 30% транспортных средств вызовет полноценный коллапс когда все остановятся.
Опять же, цифровая подпись крайне усложняет подобную систему (точнее, позволяет упростить поиск преступника, да и при некой единой сети позволяет решить эту проблему).
Ещё раз спрошу, т.е. вы серьёзно предлагаете ввести некий «платон» для легковых авто чтобы полностью контролировать частные автомобили?kahi4
18.07.2016 16:33Да. Я лично вообще предлагаю убрать из жизни «частные автомобили» как класс. Он генерирует больше проблем, чем преимуществ, а для поездок загород можно и арендовать. Вся история частного автопрома базируется на лоббировании законов и гениальном маркетинге в стиле «не мужик, если нет машины», а не необходимости. Вдобавок, даже сейчас, по крайней мере, если рассматривать только Москву, никаких проблем отслеживать за передвижением автомобилей нет, даже достаточная для этого сеть видео-камер развернута.
Теперь ближе к моему ответу: шашку кинуть незаметно можно. Парализовать движение она может — любой большой перекресток станет наглухо. Туда же (если рассматривать диверсии, покуда угон автомобилей немного не из той оперы) — что мешает нарушить работу светофоров? А когда они ломаются, всегда начинается ад на больших перекрестках. Да банально человек с болончиком может закрасить светофор и убежать, и никто его не словит.
А теперь представьте автоматизированную систему, которая общается с другими системами, подписывая себя. По подписи всегда можно определить реальное положение автомобиля и выяснить, что 10 минут назад он был вообще в другом городе. Задача провести диверсию с такой системой в разы сложнее, чем дымовая шашка.
Ну и в конце концов, она обкатана уже как военной, так и гражданской авиацией и судоходством, хоть у них мотивации были немного другие. Опять же, «да и в кустах сидеть с генератором искусственных кораблей никто небудет за неимением таких кустов в море» еще как будут. Радиоэлектронное противодействие оно такое, все методы хороши. И ГНСС сигнал подделывают за милую душу.DMGarikk
18.07.2016 16:46+2не буду продолжать дискуссию по поводу нужности авто, как минимум потому что вам не нужно было ездить в райцентр за 100 км и вы не понимаете зачем комуто это ещё понадобилось… поэтому опустим.
что мешает нарушить работу светофоров?
как минимум физические сложности доступа к самим светофорам, закрасить вам получится только зелёный сигнал у светофора стоящего на тратуаре, а у него как минимум два повторителя на больших перекрёстках и обычно один из них на мачте над дорогой. потом светофоры всегда дублируются знаками приоритета на случай их неисправности и это отражено в ПДД
А по поводу обкатано,… одно дело строго замкнутые системы типа ЖД, авиации, и частично судоходства (ничто не мешает большим кораблям со всеми электронными прибамбасами друг друга таранить)
и другое хаотичный беспредел на дороге где невозможно (на данный момент) создать полностью подконтрольную инфраструктуру (например запретить въезд в страну авто других стран?)
в РФ до сих пор не могут сделать нормальную систему автоведения поездов хотя пытаются с 70х г.г. прошлого века… а тут автомобили…
Egorkkk
18.07.2016 17:00Идея конечно классная, но вот я ставлю машину во двор офиса и примерно раз в полчаса-час гоняю по адресам плюс-минус 10км. То за резисторами, то в банкомат, то в транспортную компанию, то на металлолом. Арендовать каждый раз?
DMGarikk
18.07.2016 17:03Работникам офиса сложно понять что есть специальности на которых не надо сидеть по 10 часов в офисе, а мотаться по городу как веник, причём в городе может и не быть метро и общественного транспорта (особенно в промзонах и сами промзоны могут быть оооочень большой протяженности)
kahi4
18.07.2016 17:30+1Во-первых, это уже не личный, а служебный транспорт получается, а во-вторых, вам сложно понять, что это следствие, а не причина. Т.е. плохо развитая сеть общественного транспорта является следствием развития личного, а не наоборот. Есть куча примеров, обсуждений и подобного, где везде сходятся на этом мнении. В любом случае, личный транспорт должен вымереть как класс в сторону «автомобиль как сервис» и подобного. Там и инфраструктура подтянется. Авиация проходила этот же этап и ничего, как-то прошла.
DMGarikk
18.07.2016 17:54+1Я на своём личном транспорте ездил по работе. а потом его «служебность» превращалось в «личность» и я ехал на нём домой.
А как выглядит хорошо развитая сеть общественного транспорта в промзонах? когда на 10 километров одни склады и заводы, люди приходят на работу в 9 утра а уходят в 18… а мне нужно в склады 10, 15, 3, 24 и 78… а автобусы ходят только до одной точки в середине комплекса, пешком бегать? или вы думаете что даже при всеобщем развитии общественного транспорта автобусы будут к любому складу ходить?
потом может я не по работе туда приехал, а купить кирпичей и утеплителя и езжу по тому-же маршруту?
И вы мне предлагаете арендовать газель за 20тыс в сутки вместо того что я за два захода на старой шестёрке с прицепом за 500 рублей всё сам довезу?
vintage
18.07.2016 20:16А зачем вам арендовать на целые сутки? Уверен вам хватит и газели за 800р в час с водилой и страховкой.
DMGarikk
19.07.2016 00:11+1А почему вы решили что мне ехать до дома всего час? (да ещё и туда-обратно)
За МКАДом есть жизнь, а вот стройматериалы там есть не всегда
Я например цемент домой возил с востока Москвы на север Моск.области за 100 км, и это вышло раза в два дешевле (чем покупать на местном рынке), даже учитывая что я это делал на своём личном легковом авто с 3хлитровым двигателем.vintage
19.07.2016 03:30У вас в каждом комментарии новые условия. Давайте я продолжу за вас:
— А если мне надо шкаф в другой город перевезти? Значит всем нужно по личному грузовику.
— А если мне надо наловить рыбки в Чёрном море? Значит всем нужно по яхте.
Или можем не залетать так далеко:
— А если мне надо выпилить дырку в стене? Всем нужно иметь личную болгарку.
— А если мне надо трубу в ванной удлиннить? Всем нужно иметь по личному паяльнику для труб.
— А если мне надо витую пару протянуть до компа? Всем надо иметь по личным обжимным клещам.
Что объединяет все эти случаи? Да то, что для особых случаев всегда есть особые решения. Любой инструмент можно взять в аренду, а не забивать кладовку девайсами на все случаи жизни. Любой автомобиль можно взять в аренду с водителем или без, когда это действительно нужно. Да, сейчас аренда — не массовая услуга и потому может быть дороже.
Любители «экономить» часто не замечают, что зачастую платят за скидку куда более ценным ресурсом — собственным временем. Оно вам правда надо, в личных целях везти цемент за 100км? Это делает вашу жизнь лучше? Неужели нет более интересных занятий?DMGarikk
19.07.2016 08:55+1Условия те-же, вы просто пытаетесь спроэцировать жизнь в мегаполисе со всеми остальными городами и свой личный опыт на всех людей.
Оно вам правда надо, в личных целях везти цемент за 100км? Это делает вашу жизнь лучше? Неужели нет более интересных занятий?
Сэкономить на ремонте 30тыс, знаетете ли многого стоит. может у вас зарплата такая что вы вообще не задумываетесь о чёмто и готовы например в Дубне заказать доставку из Москвы какую либо вещь за 50р/км (как минимум, за пределами МКАД) при стоимости этой вещи в 1000р… когда доставка выходит в 5 раз дороже.
Egorkkk
19.07.2016 09:07+2Вот именно. Здесь в каждом комментарии будут новые условия, потому что вариантов применения личного авто сейчас столько, что за раз вам их никто не изложит. Я могу везти полметра проката, это можно сделать на такси, а могу две трехметровых трубы. Стоят они каждая по 100 рублей, аренда машины будет стоить 800 рублей минимум. Не всем нужно по грузовику и яхте, но если это работа/хобби (возить шкафы или ловить рыбу) — гораздо более естественно иметь грузовик или яхту, чем арендовать два раза в неделю.
Насчет инструмента тоже самое. Если я пилю дырки в стене с периодичностью хотя бы два раза в месяц — своя болгарка окупится за два месяца и начнет экономить мои деньги.
Насчет экономии времени. Где мне в Одинцово взять в аренду болгарку, обжимку и газель? Не кажется ли вам, что я потрачу втрое больше времени на сходить в прокат, взять машину, съездить в прокат взять болгарку, поехать просверлить дырку, вернуть болгарку в прокат, вернуть машину в прокат.
Неплохая экономия )vintage
19.07.2016 16:05Как я уже сказал, недоступность аренды для массового потребителя — следствие малой популярности аренды. Зачастую людям не нужны машины, болгарки и обжимки. Им нужно «попасть в такое-то место», «чтобы интернет работал», «чтобы в стене была дырка». Культ частной собственности приводит к тому, что вокруг каждого дома стоят вереницы чужих автомобилей, а если тебе надо арендовать, то нужно переться через пол города. Достаточно не сложно представить себе общество без «частных автомобилей», где достаточно пройти до стоянки пару минут, взять первое подходящее авто и быть уверенным, что оно полностью заправлено, исправно, почищено и тп. А добравшись до нужного места вы просто оставляете авто и не платите за стоянку, так как его может взять кто-то другой и поехать по своим делам. При этом по стоимости, я уверен, это вышло бы дешевле, чем сейчас вы тратите на личный автомобиль.
Мне сложно представить ситуацию, когда вам нужно делать в своём доме дырки пару раз в месяц. Не боитесь, что через пару лет у вас дом рухнет? ;-)
DMGarikk
19.07.2016 18:43Чемто утопию и коммунизм напоминает.
вам не кажется что утверждениеЗачастую людям не нужны машины, болгарки и обжимки.
черезчур смелое?
В СССР на заре его появления пытались заставить людей отказатся от кухонь и гардеробов в квартирах… очевидно же что удобнее питатся в столовке и одежду сдавать в общий гардероб… однако не взлетело, подумайте почемуvintage
19.07.2016 19:55Что же тут утопичного-то? Всё вполне реализуемо при желании.
Давайте вспомним пирамиду потребностей:
1. (низший) Физиологические потребности: голод, жажда, половое влечение и т. д.
2. Потребность в безопасности: чувство уверенности, избавление от страха и неудач.
3. Потребность в принадлежности и любви.
4. Потребность в уважении: достижение успеха, одобрение, признание.
5. Познавательные потребности: знать, уметь, исследовать.
6. Эстетические потребности: гармония, порядок, красота.
7. (высший) Потребность в самоактуализации: реализация своих целей, способностей, развитие собственной личности.
Тут нет ничего про автомобили. Автомобиль — лишь одно из средств достижения одной из потребностей.
Хз. Тут много факторов.DMGarikk
19.07.2016 20:22Что же тут утопичного-то? Всё вполне реализуемо при желании.
да понятно что и при желании можно всех в коммуналки поселить, только вот желания с бумаги в реальности обычно не реализуются, сколько графиков не рисуй и умных слов ни говори.
kaichik
18.07.2016 22:17Арендуете на рабочий день и все. Даже вместе с дорогой домой это будет 10-12 часов вместо 24.
madfly
18.07.2016 12:41Я думаю, времена, когда информация передаётся без защиты от подделки, стремительно уходят в прошлое. Угрозы приватности от обезличенных данных «объект таких-то габаритов движется там-то в таком-то направлении с такой-то скоростью» тоже нет. При желании, отследить ваше передвижение можно уже сейчас с помощью камер наблюдения. А ведь ещё грядёт ЭРА-ГЛОНАСС — вот где есть резон шапочку из фольги примерять.
DMGarikk
18.07.2016 15:45подделки чего? Мы сейчас говорим о глобальном подключении всех автомобилей к какойто централизованной системе отслеживания? а как приватность, частная жизнь?

Norno
18.07.2016 17:20А почему облако или централизованная система отслеживания? Автор комментария писал об автономном вещании на небольшую дистанцию данных о движении и базовых данных об участнике движения (габариты, возможно что-то еще, масса например). Обезличенно. А отследить, в крупных городах, как указали выше можно и по камерам уже сейчас при желании, во всяком случае камер хватает
DMGarikk
18.07.2016 17:50потому что правильно замечали в других комментариях что в обезличенные данные можно вносить сильные искажения, и получается что им нельзя доверять исходя из их неподтверждённости.
потом габариты, допустим фура… с прицепом и без, совешенно разные габариты, нужно пояснять что никто не будет содержать систему контроля прицепа (прицеплен/отцеплен/длиннее на 10 метров/прицеплен именно к этому тягачу, а не к тому что на соседней полосе) лишь потому что это удобно?
gsaw
18.07.2016 13:13+1Если сейчас находятся д-ы кидаюшие камни на дорогу или светящие лазерными указками в глаза, а с активными общением автомобилей вообще простор для развлечения открывается. Бросил на обочину компик, который всякий бред вещает и встало движение. В лучшем случае. В худшем машины начнут уклоняться от фантомных автомобилей, повылетают с дороги в кюветы. Машины должны только на свои органы чувств полагаться. Мы не в идеальном мире живем.
JediPhilosopher
18.07.2016 13:55+2Нельзя полагаться на единственный источник информации, так как он может сбоить. Но вот использовать его в комплексе — почему бы и нет. Принимаем сигнал от якобы едущей нам навстречу машины — глядим в эту точку с удвоенной бдительностью, и тот порог распознавания данных с камеры или радара что в отсутствие сигнала привел бы к ответу «препятствия нет» теперь будет распознаваться как «препятствие скорее всего есть». Тот же случай с белой фурой на фоне неба — если бы фура передала сигнал, то возможно камера бы все-таки что-то там увидела и отреагировала, зная куда смотреть.
А с обманками — ну приняли сигнал, поглядели — нет, пусто. Поехали дальше.gsaw
18.07.2016 14:14+2Получается, в место того, что бы усовершенствовать датчики на борту, мы добавляем источник информации, которому заведомо не доверяем. Общую инфу передовать, типа пробок на дороге, максимальная скорость, погодные условия, аварии и тп, которую можно защитить сертификатами — да, я согласен. А вот, М2М вряд ли.
madfly
18.07.2016 14:05Что мешает игнорировать пакеты не подписанные правильной цифровой подписью?
Никто не заставляет полагаться исключительно на обмен информацией между машинами.
«Свои органы чувств» машины вывести из строя тоже вполне возможно.
Хулиганство на дорогах — это вопрос не техники, а административного и уголовного права.gsaw
18.07.2016 14:18Если машина может сама подписывать информацию, то достаточно хакнуть один экземпляр и вы сами можете подписывать всякий мусор.
DMGarikk
18.07.2016 15:48сейчас купить любой автомобильный блок не составляет никакого труда
кто мешает купить по десятке за кило таких блоков от битых авто, и создавать реальные-«нереальные» автомобили?
Bronx
19.07.2016 09:10+1Мешает финансовая бессмысленность сего нетривиального действа, последствия которого сравнительно легко устранимы анализом информации из альтернативных каналов данных (камер, радаров и т.п.).
Да даже если забыть о финансах: вот прямо сейчас есть такой навигатор Waze, где каждый водитель может зарепортить полицейского на обочине, аварию, помеху и т.п. Казалось бы, огромное поле для злоупотреблений — можно нагенерить десятки ложных репортов. Но почему-то этого нет.
kaichik
18.07.2016 13:16+1Еще немного и напишу об этом подробно. Хотя, чего ждать, давайте тезисно.
1. Такие системы однозначно будут использоваться, это называется V2I/V2V.
2. У них очень много пока нерешаемых :) сложностей.
3. Про помехонезащищенность уже написали, но это лишь частный случай недостоверности данных. Что делать, если информация из облака противоречит информации с датчиков?
4. Со скоростью обмена данными возникают проблемы, сложно засинхронизировать все это великолепие.

geher
18.07.2016 12:21+1Вопрос по лидарам.
Встречаются на дороге два авто с лидарами. Они друг другу не помешают (в плане ослепления принимающего датчика излучателем другой машины)?qbertych
18.07.2016 12:44+2Помешать могут. Стандартный прием «а давайте замодулируем лазер псевдослучайным кодом» не работает — лидар, в отличие от радара, не измеряет время пролета лазера туда-обратно, а использует фазовый метод. То есть он и так замодулирован синусоидой, причем портить эту модуляцию нельзя — работать не будет.
kaichik
18.07.2016 13:19+1Ага. Две скорее всего не помешают, двести скорее уже помешают. Устройства, которые намеренно нарушают работу лидара, тоже существуют.

iliasam
18.07.2016 16:31+2На самом деле, большинство сканирующих лазерных дальномеров, измеряющих расстояния с большой скоростью (>10 об/сек) и работающих на больших дальностях (> 10м) используют именно времяпролентый метод — TOF.
kahi4
18.07.2016 14:33Люди уже лет 100 как открыли поляризацию. Селекция по длине несущей волны, амплитудная модуляция. В конце концов, временная селекция (правда для этого им придется научится общаться между собой, но это решаемая проблема)
qbertych
18.07.2016 15:27+3«Селекция по длине волны несущей» в оптике — это стеклышко-фильтр. А у фильтра полоса пропускания — 10 нм при доступном диапазоне длин волн радара в ~100 нм. Всего 10 разных вариантов. Упс :).
Поляризаций две. Но и это не поможет — вы не представляете, как причудливо они меняются в реальном мире.
Про АМ выше написал.
LittleSquirrel
18.07.2016 22:53Помешают, но не сильно. На приемнике получится «засветка» от встречного луча, которая, на дорогих моделях со сложным imager, вполне подавится как шум. Ситуация будет аналогична «обратке» от высокоотражающей поверхности.
Egorkkk
18.07.2016 12:34+2То есть как бы автор пишет, что первая и основная проблема автопилота — это датчики. Потом показывает стопицот типов существующих датчиков, потом, в приниципе, выясняется, что достаточно было бы стереопары, а потом он говорит, что сколько бы датчиков не было, обработать инфу с них пока никто толком не может, кроме белкового водителя. То есть дело не в датчиках?
Похоже на сплошное противоречие.kaichik
18.07.2016 13:20потом, в приниципе, выясняется, что достаточно было бы стереопары
Только этого нигде не выясняется.Egorkkk
18.07.2016 13:25Выясняется, в комментах к предыдущему посту. Да это, собственно и так понятно — у человека 95% информации приходит через стереопару. И ничего, справляется.
kaichik
18.07.2016 13:51+1В комментариях выяснили, что уровень обработки человека повторить непонятно как — это задача создания близкому к человеческому ИИ.
Второй момент — а почему вы считаете, что стоит задача повторить человеческое качество вождения? Стоит задача улучшить его, чтобы вместо 1,25 миллиона человек гибло меньше.Egorkkk
18.07.2016 13:55Таки проблема не в датчиках, а в алгоритмах?
Я думаю, что стоит задача ХОТЯ БЫ повторить. А потом уже улучшить. Но алгоритмы пока и с этим не справляются, несмотря на совершенство датчиков.kaichik
18.07.2016 14:05Давайте с тем же успехом поделим радар на компоненты и будем писать, что вот радар в виде антенно-фидерного тракта молодцом, а вот алгоритмы хромают, плохо выделяют объекты. Там точно такая же цифровая обработка.
Очевидно, что алгоритм распознавания образов с камеры неотделим от самой камеры и является составной частью датчика.Egorkkk
18.07.2016 14:09Не не, давайте радар не трогать.
Я не понимаю, если алгоритм неотделим от камеры (как это?), то почему вы рассматриваете датчики отдельно, алгоритмы отдельно )
И если нынешние камеры вполне себе сравнимы по качеству с глазом (а это как минимум), то все равно проблема в алгоритме тогда?kaichik
18.07.2016 14:25Автомобильная камера для системы ADAS — не дверной глазок и обязательно включает в себя алгоритмы выделения объектов и их классификации. Камера как оптический датчик, который выдает из себя поток, не имеет ровно никакой ценности, как не имеет никакой ценности радар, который выплюнет на выход сигнал после смесителя.
Поэтому каждый из типов датчиков включает в себя вычислители, которые специальным образом обрабатывают полученные данные, специфичные для данного типа датчика. К алгоритмам автопилотирования это имеет очень слабое отношение.
Так, вы можете создать универсальный алгоритм автопилота, который будет опираться на данные с разных датчиков (камер, радаров, лидаров). Но вы не создадите универсальный алгоритм, который сможете использовать в вычислителе радара и камеры.Egorkkk
18.07.2016 14:31+1Тогда тут спор терминологический. У вас под датчиком понимается комплекс из камеры плюс софт, в котором уже прописаны алгоритмы выделения объектов. Тогда как обычно, датчик от системы обработки информации с него отделяют друг от друга на функциональной схеме.
Поэтому и выходит, что вы говорите, что на базе текущих датчиков со встроенными алгоритмами распознавания объектов не получается сделать автопилот. Но проблема тут не в алгоритмах автопилота, а в алгоритмах распознавания объектов этими самыми вашими датчиками. Что, в общем-то и ежу понятно.
Поэтому, я бы тут как раз разделял не алгоритм автопилота и алгоритм вычислителя радара, а наоборот — эти две вещи нельзя разделять, потому что они весьма взаимозависимы.
А как раз _датчик_ можно и заменить на более совершенный — матрица с высоким разрешением или радар там быстрее вращающийся, неважно.LittleSquirrel
18.07.2016 22:59+1Это не терминологический спор, это текущее состояние отрасли. Производители «умных сенсоров» обычно не являются производителями «функциональной логики»(автопилотов) и для одной системы могут собираться сенсоры от разных производителей.
Технические причины такого разделения тоже есть и немаленькие, но это сложно в рамки комментария уложить.Egorkkk
19.07.2016 09:00То есть отрасль в системном тупике — производителей датчиков не волнуют проблемы производителей автопилотов, производители автопилотов пытаются подстроить алгоритмы под неподходящие датчики. Так?
У меня вопрос есть. Что, по-вашему, необходимо для правильного автопилота? Более совершенные датчики, более умные сенсоры или более другие алгоритмы автопилотов?LittleSquirrel
19.07.2016 09:30Извините, я видимо неудачно выразился. Естественно производителей датчиков волнуют проблемы производителей автопилотов как любые проблемы заказчика. Просто общение между двумя сторонами регламентируется в первую очередь бизнес-интересами… У меня уже был случай когда «производителю автопилотов» в ответ на просьбу дать низкоуровневые данные с сенсора было предложено пойти… прочесть условия контракта и обойтись тем, что в контракте прописано.
Но по факту это только часть проблемы. Возможность к централизованной обработке данных сильно ограничивают автомобильные шины, которые до сих пор очень неторопливы и соотношение стоимость/производительность/сертифицированность вычислительных мощностей. В результате обрабатывать низкоуровневые данные локально — сильно дешевле.
На мой взгляд нужно все ^__^ Нужны сенсоры, которые сохранив текущую производительность будут доступнее(это в основном лидаров касается). Нужны более продвинутые алгоритмы, в обрабоке данных и самом управлении. Очень нужны намного более мощные и сертифицированные чипы/микроконтроллеры.
kaichik
19.07.2016 10:17Отрасль постоянно прогрессирует, только с учетом рыночных законов, а не просто топит за все хорошее против всего плохого)
Поймите правильно, стоимость R&D во всех популярных сейчас тематиках стоит десятки и сотни миллионов долларов, если не защищать свои разработки, умрешь. Все и защищают.
Поэтому LittleSquirrel прав, нужно чтобы лучше было все. Но развитие алгоритмов автопилотирования уже ушло дальше, чем развитие снабжающих его информацией датчиков. Отсюда и мой посыл.

BelBES
18.07.2016 14:12Если человеку выбить глаз, то он все еще будет различать глубину… т.ч. человек не только за счет стереоэффекта распознает глубину...
Egorkkk
18.07.2016 14:22За счет подвижного крепления оставшейся камеры
BelBES
18.07.2016 15:12Монокулярный structure from motion не позяволяет однозначно определять расстояние, т.ч. подвижность оставшейся "камеры" может дать человеку только информацию о самом факте глубины. Там уже в дело вступают другие алгоритмы, которые глубину определяют по косвенным признакам, которые к стереоэффекту практически не имеют отношения.
Ну и да, среднее расстояние между зрачками составляет ~63мм… при такой базе глубина будет теряться уже через несколько десятков метров, но люди умеют оценивать глубину на больших расстояниях.Egorkkk
18.07.2016 16:25Так я именно об этом и толкую — не в камерах дело и не в датчиках, а в алгоритмах.

ilving
18.07.2016 13:51Стереопара — это изображение с двух камер, так?
Тогда (утрируя) надо в багажник запихать пару стоек с серверами, чтобы иметь возможность на лету обрабатывать видеопоток с достаточно высоким разрешением.
И что камеры будут делать в тумане, например?Egorkkk
18.07.2016 13:58+1Так я и пытаюсь сказать, что дело вовсе не в датчиках же.
А что человек делает в тумане?
JediPhilosopher
18.07.2016 14:01«И что камеры будут делать в тумане, например?» — а человек что в этой ситуации делает? Снижать скорость до такой, при которой дистанция видимости становится больше тормозного пути, очевидно же.
ilving
18.07.2016 14:14Да, нормальный человек скорость снижает. Но в идеале хотелось бы видеть автопилот, который водил бы лучше человека. Поэтому камеры лучше бы дополнять тем же радаром и упомянутой выше системой V2I/V2V
И в любом случае — при использовании камер остается вопрос со скоростью обработки видеопотокаEgorkkk
18.07.2016 14:32Пока не видно автопилота, который бы водил хотя бы немного хуже человека ) И проблема, на мой взгляд, как раз не в датчиках.

ice938
19.07.2016 10:53+1И, не снижая скорости, воткнуться в не оборудованный системой V2V столб, упавший поперек дороги, потому что высота его профиля над дорожным полотном лежит вне пределов чувствительности радара, а камера в тумане слепа. Нельзя доверять одному источнику информации, нужен дублирующий

worldmind
18.07.2016 12:53Как видим недостаток только цена, а все прекрасно знают что делает с ценой массовый рынок, компы и мобилы тоже поначалу дорого стоили.
Platon_msk
18.07.2016 13:17«Мгновенная (1/20–1/50 секунды) обработка данных, что особенно важно для высоких скоростей.»
Это правильная цифра?
А то на скорости 100 км/час эта «мгновенная обработка» превращается в 1-2 измерения на метр пути. Откровенно мало.joger
18.07.2016 13:19а теперь вспомните из ПДД скорость реакции белкового водителя
Platon_msk
18.07.2016 13:44Объективно «белковый водитель» воспринимает информацию непрерывным потоком.
Попробуйте «моргать наоборот» — не за рулём, конечно. Дефицит информации наступает уже при ходьбе.
kaichik
18.07.2016 13:24Да, правильная цифра, в реальности речь даже идет о 1/10-1/20. Вот поэтому в системах adas важно прямое и точное измерение вектора скорости объектов вокруг, это позволяет предсказывать дорожную ситуацию и «читать» обстановку, как это делает белковый водитель.
LittleSquirrel
19.07.2016 09:3440-50 милисекунд — вполне достаточная скорость обработки для AEB без верхнего порога скорости, например. При условии стабильно работающих сенсоров «видящих» на 100 и более метров.
joger
18.07.2016 13:17я один не могу понять, что значит «прямое измерение скорости объектов»? как можно по одному «скриншоту» (камера, радар, лидар) её определить? каким образом по вашему это может делать радар?
kaichik
18.07.2016 13:26По доплеровскому смещению же :).

elmm
18.07.2016 13:58Абсолютное значение скорости вы узнали по доплеру, а вектор как получить. Ведь 100км на встречу в параллельном ряду и ваше это несколько разные вещи. А как сопоставить объект с камеры, где понятно более-менее, по какой полосе оно едет и прямое измерение скорости доплером (я так полагаю радар)?
kaichik
18.07.2016 14:07+1Тогда уж так: с прямого измерения я получу абсолютное значение радиальной скорости (со знаком), а по изменению дистанции и угла со временем я вычислю значение азимутальной скорости. Задачу облегчает то, что с точки зрения предотвращения столкноений радиальная скорость намного важнее азимутальной: если объект не приближается ко мне, он не представляет опасности.
dolbnya
18.07.2016 13:20Почему цена за камеры указана как «несколько сотен долларов»? Автомобильные камеры чем-то сильно отличаются от обычных, стоящих в смартфонах/мыльницах? Чем объясняется высокая (на мой взгляд для сегмента камер) цена?
kaichik
18.07.2016 13:22Под «камерами» я подразумеваю комплексное решение на их основе. Решение получается дороже за счет:
1. Компонентов в автомобильном исполнении
2. Высокопроизводительных блоков обработки
3. Программного обеспечения.
То есть из 500 долларов за систему на базе камеры сама камера с корпусом может стоит 50 баксов, блок обработки 150, а затраты на R&D (отраженные в стоимости ПО) еще 300.
kahi4
18.07.2016 13:241. Куда-то пропали все инерциальные системы, которые являются основой для некоторых из представленных датчиков, а так же самостоятельными измерительными приборами.
2. Куда-то пропало комплексирование. Грамотно выстроенная глубоко-комплексированная система в состоянии решить проблемы большинства датчиков (кроме цены, разумеется).
3.
У камер плохое разрешение по дальности, они с трудом понимают расстояние до препятствия или скорость сближения (стереокамеры отчасти решают проблему).
Нет прямого измерения скорости объектов, ее можно понять по серии кадров, и все равно измерение нечеткое.
Сильно влияние погодных и дорожных условия — пресловутый «белый фургон на фоне яркого неба» в недавней аварии.
Обработка данных с камер занимает время: задержка тем больше, чем сложнее система камер.
Ничего из этого не является неразрешимыми проблемами. Зная апертуру, угловые соотношения, стабилизировав изображение даже просто БИНС (которые сейчас доступны за сущие копейки, хотя такие и не особо хороши), не сложно узнать расстояния до типовых объектов, которых на дороге навалом. В вторую мировую умудрялись разведывать характеристики вражеских кораблей чтобы оценить их габариты и вести за счет этого прицельный огонь, а сейчас прикидывать можно размеры по открытой базе, как минимум, типовые автомобили, городской транспорт, столбы и прочее. ГОСТ тут только в помощь. Скорость сближения так же вполне неплохо определяется по изменению угловых размеров.
Нет прямого измерения скорости объектов, ее можно понять по серии кадров, и все равно измерение нечеткое.
Выделю отдельно.
ОЭПС-27. Просто погуглите. Честно. Вообще все эти проблемы давным давно решены еще во время, когда автокоррелятор черно-белой сетки размером 32х32 весил 50 кг.
Подобные прицельные станции и не такое умеют, но они просто адски дороги. Конечно, лепить ФАР в каждую машину не будут (пожалуй, самое дорогое, что в них есть), но тот же лидар — вполне можно мерять расстояние только до интересующих объектов, а не всего подряд.JediPhilosopher
18.07.2016 14:06Вспоминается байка про карликовый фейковый аэродром. Его сделали в масшатбе 1:2 или типа того, в итоге пилоты атакующих его пикирующих бомбардировщиков неправильно определяли расстояние до земли, не выходили вовремя из пике и разбивались.
Какой-нибудь шутник поставит знак или столб в два раза больше, и все, оценка размеров уезжает.kahi4
18.07.2016 14:55У человека тоже уедут. А еще бывает атмосферная перспектива. А еще можно смотреть контрастность и резкость, уход цветов, да способов определения глубины достаточно много. Одному верить не стоит. К слову, бинокулярное зрение из них самое бездарное, не понимаю, почему тут все так на него сетуют. (Кто не верит, что оно бездарное — как-то у потерявших один глаз не наблюдается проблем с определением глубины. Видимо, эволюционно это было полезно, сейчас нет. Камеры на расстоянии 10 см друг от друга на достаточно малом расстоянии (пальцем в небо — 2 метра, не больше) перестанут адекватно оценивать расстояние до объекта).

wild_one
18.07.2016 15:20+1А вот здесь вы не совсем правы. Как же я ненавижу свое одновременное (не бинокулярное) зрение — вы и представить не можете. Чуть замешкался — и на близких расстояниях уже страшно поставить ногу на ступеньку чуть ниже, иногда мозг выдает совершенно неправильную информацию о глубине.
Не говоря уж о том, что поймать предмет, например, можно — но с гораздо меньшей вероятностью.

FlashManiac
18.07.2016 13:31По идее достаточно двух камер + двух микрофонов + гироскоп + сильный ИИ. И мы люди этому живое доказательство.
kaichik
18.07.2016 13:341,25 миллиона погибших на дорогах каждый год тому живое доказательство, вы об этом?
FlashManiac
18.07.2016 14:40Я думаю почти все аварии случаются из-за человеческого фактора — почти всегда это несоблюдение ПДД. А ПДД «написано кровью» как говорят. Если бы все люди соблюдали ПДД то количество аварий было бы намного меньше. К счастью сильный ИИ лишен человеческого фактора.
Да даже тот случай с погибшим инженером на тесле — если бы рулил сам человек и ему солнце светило в глаза — по любому бы он снизил скорость и был бы предельно осторожен — и опять же виноват именно человек — он не соблюдал инструкции к автопилоту а ПДД тем более.
Сейчас эти «автопилоты» опасная игрушка — не более. Проблема не в датчиках — проблема в ИИ. Когда сделают ИИ который будет принимать решения лучше и быстрее чем человек — вот тогда и можно будет говорить об автопилоте.
Дополнительные датчики конечно помогут не только человеку но и ИИ избегать опасных ситуаций. Но достаточным является, как я уже писал, стерео изображение и звук.
KyberPrizrak
18.07.2016 13:48Касательно лидаров, в роботах-пылесосах Neato используют очень простой вариант 2D-лидара — меня всегда интересовало, почему подобную схему нигде больше не используют!? Я конечно понимаю, что это не совсем лидар, но такая конструкция мне кажется оптимальна для робомобилей по соотношению цена/достоверность данных.
Плюс я думаю тут есть большой потенциал для усовершенствований. Например, сделать 3D-вариант сканера (если использовать узкие полоски света, как в системе слежения Lighthouse для HTC Vive). Еще можно использовать несколько принимающих матриц (для повышения точности).JediPhilosopher
18.07.2016 14:16+1Мне кажется главная проблема — дистанция. Сколько там роботу-пылесосу надо? Пара метров, вряд ли больше. А для машин это должны быть десятки и сотни метров, чтобы определить препятствие на достаточном для торможения с большой скорости расстоянии.
KyberPrizrak
19.07.2016 14:36Я думаю дистанция зависит от мощности лазера (в настоящих лидарах ведь тоже лазер используется!?).
Mad__Max
18.07.2016 16:41А там разве именно лидар (пусть и 2Д)? Обычно там как раз то, что в статье описано как "ультразвуковые датчики" — а про их ограничения там же и написано. Несколько метров дальности это хорошо для парктроника автомобиля или домашнего робопылесоса, но почти бесполезно для авто двигающегося по дороге на приличной скорости.
encyclopedist
18.07.2016 17:15+2Там триангуляционный лазерный дальномер. См, например, "Самодельный сканирующий лазерный дальномер"

potan
18.07.2016 13:56Камеры потенциально не хуже человека будут.
wmtoolsnet
18.07.2016 14:56-1Будут. И механика, и обработчики.
Природе понадобились миллиарды лет, чтобы отточить технологию и превратить ее в глаза человека. И то, полно минусов.
*
На мой взгляд, самый лучший вариант датчика — это копирование человеческого глаза, начиная от человеческой «ПЗС» и заканчивая аккомодацией. Но увы существующие технологии вряд ли позволят сделать такое в габаритах меньше одноэтажного дома.
kahi4
18.07.2016 14:01+1Вдогонку, про «почему комплексирование неизбежно» и про реально «неразрешимые трудности»:
— камеры: засвет, оптические искажения, туман и дождь, а так же необычайно редкое явление, которое наблюдает каждый житель нашей планеты раз в сутки — ночь. Все это ставит крест как на единственном источнике информации. И не нужно приводить человека в пример, у него ровно те же проблемы с оптической системой.
— радары: большие. Прямая зависимость размера антенны, длины волны и обнаруживаемые объектами. Миллиметровый диапазон адски дорогой, да и радар для него большой. Но главное — слепота. Радар позволит вам вполне корректно влететь в бетонный столб и прочие предметы, прозрачные для него.
— лидары. Являются, по факту, подмножеством оптических систем, так что грешны все тем же: туман, дождик — уже начинают сбоить. Помимо этого, сильно тупят при попытке определить расстояние до стекла, а так же глянцевых поверхностей под углом (когда очень маленький коэффициент рассеивания у поверхности и она его так же планомерно отражает куда-то вдаль). Правда это решается естественным путем за счет случайных колебаний по поверхности и рано или поздно луч наткнется на «удобную для него плоскость», однако случаев, когда он что-то пропустить может по этой причине либо произойдет ложное срабатывание или неправильное определение расстояния, придумать не сложно (лужа, например, в которой «отразится» впереди идущий транспорт с большим, чем на самом деле расстоянием).
— ультразвук. Действительно, очень маленькая дальность, а так же зависит от среды (выхлопные газы или прочее могут заставить его врать, хотя не думаю, что так сильно).
«Нет возможности понять угол на объект или прямо измерить скорость. Низкая достоверность данных.» — это лишь вопрос конструкции. Они позволяют и скорость и угол мерять.
— инфракрасные камеры — такой же засвет, проблема с отводом тепла, достаточно низкая пропускная способность. Зато в паре с лазерным дальномером позволит быстро реагировать и отслеживать людей и животных, определять расстояние для них, в общем — что в авиации называется «сопровождение». То, что имеет узкую область применения вы отметили, впрочем, он увидит и автомобиль, и столб (как правило, его температура отличается от окружающей), да и много чего. Чисто инженерная задача, а не ограничение технологии.kaichik
18.07.2016 14:18Чувствуется академический настрой и военный подход) Давайте будем ближе к практике.
Комплексирование — да, я и пишу, что одной системой не обойтись. А если мы приплетаем V2I/V2V, вопрос достоверности данных возникает еще острее.
Радары большие? Вообще с уменьшением длины волны габариты антенны уменьшаются, 4-канальная широкая микрополосковая антенна для adas занимает 8 на 10 см в диапазоне 24 ггц и 4 на 7 см — в диапазоне 77. Все остальные компоненты помещаются либо на обороте антенны, либо еще на одной такой же плате. Радары вообще в этом плане самые компактные датчики, еще и ставится могут за радиопрозрачным элементом типа бампера.
Бетонные столбы радары, разумеется, видят.
Про измеряющий угол ультразвук, лидары вместе с ИК и другие инженерные задачи. Они абсолютно не имеют практического применения в плане цены, технологичности или совокупности этих и других качеств. А в отсутствие практических примеров их даже и рассматривать смысла нет.kahi4
18.07.2016 14:29Вы меня раскусили. Не зря мне год преподавали авиационные прицельные системы.
Видимость столба радаром зависит от материала столба и длины волны радара. Санти и миллиметровые радары все превосходно увидят, дециметровые в 5-ти см бетонный (без железа. Такие бывают? ну допустим, что да) уже влетит. Я столб к примеру взял, влететь во что всегда найдется. К счастью, большинство конструкций на дороге металлические, их будет хорошо видно.
По поводу размера — я не спорю, действительно — меньше диапазон, меньше антенна. Только и меньше дальность работы. В общем — как вы догадались, я имел дело только с авиацией и там миллиметровые станции мягко говоря не маленький. Впрочем, возможно, это потому что им далеко видеть нужно, а может потому что мои познания подкисли в 80-х. Тут я передаю эстафету другим. Скажу лишь, что ФАР выглядит мера-великолепным изобретением, которое решает огромное количество проблем, но в целом, она дороже чем все остальные системы вместе взятые. С другой стороны — сейчас, скорее всего, не особо дороже. Сам видел китайские ФАР по доступной цене (и отвратительному качеству, но наводиться на лампочки дома сойдет).
Лидары вместе с ИК. Это гениальное решение, которое позволяет отслеживать в реальном времени огромное количество движущихся объектов и всего прочего, что различимо в ИК диапазоне, малыми усилиями. Техника 80-х годов позволяет отслеживать более 10-ти целей на расстоянии в десятки км и ничего так. Не понимаю, почему вы так категорически к ним относитесь. Вопрос «влетания» в то, что неразличимо этой системой — отдельный вопрос и должен отдельно решаться, как система сопровождения, на мой взгляд, очень изящное решение. Не спорю, не такое хипстерское, не позволяет строить красивые картинки и там нет «ИИ», нейросетей, только работает хорошо.kaichik
20.07.2016 10:43Стоит иметь в виду сразу несколько допущений, которые сужают пространство для маневра и приведут к уже озвученному:
В радарах для adas используются два диапазона, 24 и 77 Ггц. Интерес смещается ко второму.
ФАР пытаются использовать, в первую очередь чтобы как-то привить радару достаточную разрешающую способность по углу. Но все упирается в габариты и стоимость, проще научиться измерять угол на цель с помощью фазового метода (хотя и это удорожает конструкцию).
Автомобильные радары излучают максимум 10-20 мВт, этого достаточно для дальностей до 300 метров, а больше не особо нужно.
kahi4
18.07.2016 14:49Опять же, если ФАР в см-диапазоне стоит доступных денег — вообще не понятны проблемы. Она хорошо видит в темноте, тумане, дожде, она в принципе хорошо видит, с ней просто работать, она позволяет «сопровождать» объекты, всем хороша. В связке с лазерным дальномером (которому, теперь, нужно определять расстояние до интересующих объектов, а не всего подряд, что на порядок проще лидара) покрывает 99% возможных ситуаций. РЭП на дорогах вряд ли массово будут применять, ФАР позволяет смотреть далеко, при желании даже сквозь деревья, заборы и прочий хлам. Легко побороть «засранность эфира», да вообще выглядит как silver bullet, делающей ненужным все остальное. Скорость сближения мерять умеет, определять материал умеет, видит сквозь стены, да и сами стены, работает мгновенно — все в ней хорошо. Инженеры Тесла не знают о ФАР? Не думаю. Скорее всего, вопрос лишь в цене (и размере, и каких-то конструктивных сложностях, типа отвод тепла).

semmaxim
18.07.2016 14:15А можно ещё написать, как каждый тип будет себя вести, если вокруг будут сотни таких же датчиков? Они друг-другу мешать будут? Ну с камерами понятно — никаких проблем. С лидарами выше сказали — огромные проблемы. А другие?

AVKinc
18.07.2016 15:13+1Никаких автопилотов никогда не будет пока не создадут настоящий ИИ, а создать его в ближайшее время и на существующей элементной базе очевидно невозможно.
Человеки без проблем летают на гоночных квадрокоптерах по одной только камере довольно посредственного разрешения и с помехами. На больших скоростях и совершая безумные маневры.
Так что датчики по сути дела вторичны. Мозг нужен.25080205
18.07.2016 19:25Вообще-то если мы хотим встроить автопилот в существующее ДД, то он должен быть фактически как водитель. Воитель же управляет, получая 99+% информации от зрения, какой-то мизер дает слух и ветибюлярный аппарат. Соответственно, лидары и прочее — это уже «вкусные» дополнения, а автопилот, чтобы быть автопилотом, должен уверенно вести машину ТОЛЬКО по информации с камер видимого спектра.
kaichik
18.07.2016 22:39+1Уже решили, что для «уверенно вести машину ТОЛЬКО по информации с камер видимого спектра» обработка должна быть уровня человеческого мозга. Чтобы вы понимали, эта задача не то, чтобы не решена, а пока в принципе ставится под сомнение возможность ее решения.
Автопилот до тех же пор отложим?
kaichik
18.07.2016 22:40Ну не будет его, не будет в обозримом будущем. Отсюда хорошие алгоритмы, которые не получается делать искуственным интеллектом. Отсюда необходимость в избыточности информации от датчиков. Отсюда проблема в датчиках.
Egorkkk
19.07.2016 09:11-1У вас опять подмена причины следствием. Если у кого-то не получается делать хорошие алгоритмы (неважно, по какой причине) и ему нужна куча навороченных датчиков во всех частях спектра чтобы хотя бы просто ехать по хорошей дороге с разметкой и знаками — проблема ну нихрена не в датчиках.
kaichik
19.07.2016 10:20Я уже приводил пример — в симуляции воздушного боя ИИ уже побеждает человека. То есть как только у ИИ появляется полная информация о происходящем, он резко становятся хорошими и выносит человека.
Egorkkk
19.07.2016 10:50Полная и, что важнее, безошибочная. То есть ИИ может победить человека только при полностью достоверной информации. Это говорит о том, что алгоритм изначально тупик. Потому что человек, как раз, может действовать на основе неполных, частично поврежденных, недостоверных знаний. Он может прогнозировать в такие моменты, когда самый умный нынешний ИИ даже не начнет шевелиться.
Нет и не будет таких датчиков, которые предоставят автопилоту 100% достоверную информацию. Это физика.kaichik
19.07.2016 11:22Достоверных датчиков не будет, зато будет превосходящий человека ИИ автомобиле будет. Ну OK.
Egorkkk
19.07.2016 11:37Поэтому я и говорю, что надо начинать с алгоритма, который бы мог принимать решения как человек, на основе текущих достижений науки и техники.
Кстати, у меня вот такой вопрос. На дороге бывают ситуации с выбором «наименьшего зла», когда я решаю бить боком машину на соседней полосе вместо того чтобы бить едущего по встречке велосипедиста. Как в этом случае должен действовать автопилот?maxpsyhos
19.07.2016 11:54Легко сказать «надо начинать с алгоритма»… Это как «чего совершенствовать ракетные двигатели, давайте начнём с антигравитации».
Egorkkk
19.07.2016 12:13Нет, это как совершенствовать уголь для ракетных двигателей, вместо того, чтобы попробовать использовать новый и неизведанный гептил.
kaichik
19.07.2016 16:11Вряд ли нам стоит соревноваться кто смешнее сравнение придумает, мы все дальше уходим от вопроса.
Давай по-другому. Ваш прогноз, как скоро случится значимый прорыв в ИИ автопилотов, который кардинально улучшит его поведение? Человеки же не дураки, работают в этой области.

naething
19.07.2016 07:54Что значит не будет? По Маунтин Вью и Пало Алто каждый день рассекают самоуправляемые гугловские автомобили. Делают повороты, перестраиваются из полосы в полосу. В них даже руля нет, только джойстик на случай, если придется вручную управлять.
25080205
18.07.2016 19:20С каменрами есть проблема — их «острота зрения» как у очкарика без очков. С какого расстояния читается номер на картинке с видеорегистратора? А глазами с какого? А ночью? А в движении? Различие огромно… Камерам придется подтягиваться до уровня глаза. И тут еще веселье — глаз видит столь здорово только по центру, по краям — так себе. Но его центр постоянно перенацеливается на интересующие объекты. А еще головой водитель крутит частенько. Возможно, в дополнение к «обзорным» камерам добавят камеры с узким полем зрения, которые будут активно переводиться на заинтересовавшие объекты и осматривать их более четко.
Mad__Max
19.07.2016 00:14А просто ненужно пытаться сравняться (или превзойти) глаз методом грубой силы "в лоб". Для этого потребуется камера на несколько десятков мегапикселей, с хорошей оптикой и высокой светочувствительностью, т.е. большой матрицей не только в
попугаяхмегапикселях, но и физически большой (в дюймах), чтобы на каждый пиксель приходилась площадь достаточная для эффективного сбора света и снижения шумов.
Что дорого + сложно такой поток информации потом обрабатывать "на лету".
Но глаз можно легко повторить и даже превзойти парой камер: неподвижной широкоугольной дающий общий обзор — для этого хватит приличной FHD камеры или чуть выше. + вспомогательной камеры всего на 1 Мp но с углом зрения всего градусов 10 (т.е. телеобъективом) на поворотном по 2м осям подвесе управляемым компьютером в реальном времени на основе потока данных с широкоугольной, чтобы рассматривать наиболее важные или "подозрительные"(с распознанием которых у алгоритма возникают затруднения) объекты с максимальным качеством.
Такая связка будет видеть лучше глаза, в т.ч. без труда распознавать знаки, сигналы светофора, потенциальные препятствия и т.д с большого расстояния лучше чем человек с нормальным зрением.
Собственно часть систем уже в эту сторону идет — во фронтальной проекции сейчас на некоторых авто уже ставят 2 камеры: с широкоугольной оптикой дающей охват 120-180 градусов и с телеобъективом с охватом градусов 30. Но 2я пока неподвижна и смотрит только прямо вперед, поэтому делать угол обзора еще меньше (и за счет этого получить дальность и угловое разрешение намного выше) нельзя. Остался всего один шаг до эмуляции глаза связкой из 2х простых камер, вместо попыток сделать одну мегакамеру.
P.S.
В случае записей с видео регистраторов проблема еще в куче китайского барахла с поддельными характеристиками дающими псевдо FHD картинку — в большинстве недорогих моделей съемка на самом деле идет в 1280х720 (а в особо запущенных случаях и вообще в чем-то уровня 640х480) а потом программной интерполяцией растягивается до FHD (1920x1080 ) или даже выше. В результате получается вроде и высокое разрешение — а смотришь и видишь сплошное мыло, на котором знаки и номера машин действительно не особо хорошо читаются.
С полноценного(у которого и камера соответствующая и процессор не сильно портит картинку ужимая ее в файл на флешке) FHD видеорегистратора номера уже вполне неплохо читаются. Похуже конечно чем собственными глазами находясь в аналогичных условиях, но уже совсем не пропасть.

perfect_genius
18.07.2016 21:53+1Почему бы лидары ставить не в машинах, а в окружающей местности? Чтобы машины на ходу снимали с них информацию.
Reconstructor
18.07.2016 22:23Это мой первый пост на гийктаймс. :)
По существу. По моему, разделять проблемы датчиков и когнитивных процессов не очень правильно. Такой простой пример: перед вами стакан с водой. Когда вы решаете отпить, мозг очень быстро и точно определяет положение и расстояние, потом так же быстро и точно выдает команды руке и она, в итоге, очень быстро и точно преподносит стакан к рту и потом обратно. Ага, скажете вы — стереопара! Но все равно система работает отлично даже если закроете один глаз. Ну, скажете вы, тогда оно работает сравнивая объект интереса с окружающим миром в режиме реального времени (отдельный вопрос как это описать кодом). Но суть в том, что система будет работать на ура, даже с одним глазом и в условиях низкой контрастности, например левитирующий стакан с водой на совершенно белом фоне. Можно даже прибавить туман (пар) все равно будет работать. И все это даже не когнитивный процесс, оно происходит на подсознательном уровне. :)
Так что, подумайте насколько глубока пропасть между белком и железом. Это даже не пропасть, это бездна.kaichik
18.07.2016 22:36Поздравляю:)
Но еще проще подумать о мыши — она же ориентируется в пространстве, управляет своей тушкой, еду находит, социализируется. Лет через 5-10 привычный компьютер догонит ее мозг по производительности, а эмулировать такую вычислительную мощь можно уже сейчас. Но что-то не получается пока воссоздать.
Так что да, пропасть, отсюда и необходимость огромной избыточности информации для принятия решения автопилоту.25080205
19.07.2016 04:40Подумайте о одноклеточных! Вот где стоит удивиться — всего одна клетка, но справляется со всеми теми же «вызовами» окружающего мира, точно так же вынуждена искать пищу и накапливать энергию, атаковать и защищаться, искать партнера и размножаться, выбирать направление и двигаться. Ода клетка, без микроскопа не видимая. На фоне этого, массогабарит мыши — это уже очень большая роскошь!
Reconstructor
19.07.2016 10:36Ну, нет. Научи мышь пить из стакана, или что-то в этом роде. Оно ближе к железу, чем к нам, т.е. снова бездна.
ivaniv
18.07.2016 22:23+1Кстати в порядке бреда: Есть сейчас наёмные водители, а что если создать в будущем сервис с удалёнными водителями. Допустим у вас покругу камеры, которые дают полный обзор плюс звук, плюс датчики. Садитесь в машину, конектитесь к свободному водителю (как оператору call центра) и он вас везёт куда скажете. Банально даже если вы хотите поспать в дальнем трипе то можно временно задействовать такого водителя…
AntiForeZz
19.07.2016 21:04Не взлетит: отдача картинки по радиоканалу, конвертор, маршрутизатор. Если пинг в одну сторону будет ~100мс — это уже будет хорошо, да еще и с учетом большого количества данных. Помимо этого еще от call центра должно дойти управление к авто — это еще ~100мс. В итоге ~200мс — не мало с точки зрения управления авто. А если связь хотя бы на секунду-две пропадет? А если это случится перед поворотом или в повороте?
И даже если приложить нереальные усилия в разворачивании инфраструктуры, то с экономической точки зрения — это невыгодно. Заработною пату водителю все так же нужно платить, так же нужны деньги для поддержки сложнейшей инфраструктуры (а это будет больше затрат чем на водителей). Если брать водителей на аутсорс, то здесь появляется еще больше требований к сети: больше расстояние — больше коммуникационных связей — больше пинг — меньше безопасность. Даже с точки зрения клиентов как-то страшно садится в такое авто, зная что водитель ничем не рискует.
AlviGela
18.07.2016 22:23-2Бальзам на мою истерзанную душу!
Я тот самый парень что создал лидар за 250. Дешевый и не поддающийся помехам от соседних лидаров. Таких нет на рынке сейчас! Сделал прототип. Доказал способность. Использую метод, который конвеционно не используется!
Все есть.
Но вот пробить головой стену не получается! Создать что-то и доказать это нужным людям это разные вещи! Связаться с ними невозможно. Ты в идешь в спам со всеми письмами. В результате шиш с маком. Лидар. Есть! Тот самый который решает остаток проблем роботов водителей. Но нет связи ни с кем.
Мрак просто!( Прямо как Тесла который по всей Европе бегал со своим переменным током, пытаясь что-то доказать и каждый раз натыкался на стену непонимания.kaichik
18.07.2016 22:25+2Если у вас есть прототип, который можно снять на видео и показать, не поверю такой косности индустрии)
Скорее преимущества пока на бумаге, для доделки нужно под миллион баксов, тогда конечно ой(AlviGela
19.07.2016 01:03Есть. И видео есть. И файл с презентацией объясняющий базовую логику изобретения.
Мало того я этим делом уже три года занимаюсь. Поэтому все продумал, проэксперементировал. Знаю как, каким образом, что к чему соединять. Как менять частоту, чтобы не было помех. Разрабатываю второе поколение с 5 раз в секунду скан на 360 градусов в 2Ди. С разрешением в один градус. Можно быстрее с меньшим разрешением. В динамике менять взависимости от нужды. Специальную методу — разработал. Протоколы. Все есть. Есть простой прототип показывающий что способ обладает чрезвычайным потенциалом. Именно для авто! Этому есть причина. Он не годится для роботов или чего-то небольшого.
Все есть. И деньги на это нужны плевые.
Нет понимания. Потому что слишком необычно. Я сам с первого раза отбросил. И понимаю реакцию первую спеца. Но если поймешь и вдумаешься. Там такое!!! Просто удивительно что до сих пор до этого никто не додумался! Ведь очевидно же.LittleSquirrel
19.07.2016 01:17+2Сделайте из презентации статью, может кто и найдется. Или хотя б презентацией поделитесь.
vintage
19.07.2016 03:42+1Так это, вперёд на кикстартер. :-) Только оформите это конечным продуктом. Денег набросают — свою фирму откроете, а не будете у других пороги обивать.
25080205
19.07.2016 04:49+3Опасаюсь обидеть, но таких случаев много, очень много.
— Есть гениальное-уникальное изобретение, но меня никто не понимает!
— Поясни, о чем речь, покажи…
— Нет-нет-нет, украдут идею! Но изобретение гениальное, просто меня никто не понимает!
Нужно хоть какое-то раскрытие информации или уж не плакаться, а идти по длинному пути с оформлением патентов всех цивилизованных стран. Других вариантов как бы нет. А идею действительно могут украсть.
kaichik
19.07.2016 10:23+1Плюсану, напишите обзорную статью прям здесь и покажите результаты испытаний. Вы получите обратную связь, в том числе как пойти по пути коммерциализации. Даже я что-то смогу подсказать.
zigzag8312
19.07.2016 18:02+1Подумал, пока читал комментарии ниже, что самый простенький вариант 360 градусного лидара почти без засветок от других таких же лидаров сделать довольно просто должно быть:
Нам потребуется сам лидар, компас + gps — всё это должно быть в «умном» автопилоте.
Как делать:
На всех конечных устройствах синхронизируется время по gps (точность порядка единиц микросекунд), компас в паре с тем же gps дает достаточно точную картинку о направлении движения, и, как следствие, вектор, как в пространстве направлен сам лидар физически. Исходя из этих данных программно, автономно синхронизируем лидары таким образом, чтобы они почти синхронно светили все дружно в примерно одинаковых направлениях относительно местоположения. В результате количество засветок будет минимальным, если все производители «договорятся», что светить надо только в «спину» другим лидарам.LittleSquirrel
19.07.2016 22:38-1Увы, на практике это нереализуемо, очень сложно достичь хотя б синхронизации маленьких зеркал в «кирпичиках», синхронизировать вращение целой «головы» — за гранью фантастики, на мой взгляд.
LittleSquirrel
18.07.2016 23:51+2Попробую, в меру своих знаний предметной области, приведенные факты и цифры подправить/добавить:
камеры плюсы:
1- лидары, не все, тоже распознают дорожную разметку, просто это чуть больше геммороя.
5- камера допускает самую компактную установку из всех вариантов, если есть возможность сделать нужную проводку конечно.
Радар плюсы:
5. Обязательно нужно дописать защищенность от загрязнения, это достаточно важный фактор для серийного производства.
Радар минусы:
5. Джиттер. Сигнал отражается от разных точек на поверхности цели, потому, несмотря на алгоритмы обработки, на выходных данных обьект немного «подрагивает».
6. Весьма посредственен на пешеходах, особенно неподвижных.
Лидар плюсы:
1. Я бы поправил что «вундервафельность» напрямую зависит от стоимости. Сейчас вполне есть недорогие решения, дешевле заветных 250 долларов, вот только параметры там куда скромнее.
2. Может распознавать разметку(не знаки).
Лидар минусы:
1. На самом деле не совсем. Тот же большой Велодайн с картинки вполне раскручивается до 15 герц, на 10 работает очень хорошо. Сканирующие «кирпичики» от Sick и Ibeo вполне дают 25 герц, т.е. по частоте получаемых данных не особо уступают радару или камере.
3. Хрупкость исключительно вопрос адаптации под серийное производство.
Ультразвук минусы:
4. Эффективность сенсоров падает с ростом скорости. Насколько я помню после 80 толку почти нет, один шум.
Примерно так.
P.S.: Статья о sensor fusion будет?AlviGela
19.07.2016 01:10-1На счет лидаров. Хоть кто-то понимает почему гугль который эти лидары от велодина уже десяток лет использует, ездит гуськом друг за другом или в одиночку?
Потому что два велодина не могут рядом работать! Они будут друг другу мешать! Это метод измерения time of flight. Он не годится для несколько машин рядом. Об этом знает и Маск. Потмоу и чурается лидаров со скепсисом. Обоснованным.
Вот только я сделал лидар, которому это не помеха! Хоть сотня машин на дороге, каждыу будет видеть отблеск только своей частоты. Способ измерения СОВСЕМ ДРУГОЙ.
Единственная проблема достучаться до кого-то кто к этому может приложить руку для серии. Заработает миллиарды. Потому что штука будет на каждой второй машине через 10-20 лет.
Уже должна была быть. Проглядели эту возможность автопроизводители и сенсоропродуценты.LittleSquirrel
19.07.2016 01:29+3Извините, но не верю. Мы ставили авто с одинаковыми лидарами(не Велодайн, не 360 градусов) против друг друга, все вполне работает, деградация очень скромная и вполне по силам обычным алгоритмам шумоподавления. У solid-state будет хуже, но тоже не трагично, «ослепление» будет частичным и лишь на некоторые «кадры».
qbertych
19.07.2016 12:47О, это интересно. А можете про детали рассказать? Какого рода деградация, в каких условиях она максимальна/минимальна, есть ли особенности борьбы с шумом?
LittleSquirrel
19.07.2016 22:55+1Деградация — засветка отдельных ячеек на матрице, до максимального значения. Матрицу это не повреждает, просто теряем немного информации в данном скане. Посколько луч хорошо сфокусирован — засвечивается далеко не вся матрица, большая часть остается вполне в цикле облучения рабочей. Для проявления эффекта оба сканера должны находится в одной фазе, т.е. из-за несинхронности зеркал сенсоров даже у стоящих напротив друг друга сенсоров «компрометируется» далеко не каждый скан.
В общем получить долговременное ослепление лидара весьма тяжело, а 1-2 скана не должны быть критичными для системы.
AlviGela
19.07.2016 15:09Незнаю что вы ставили друг против друга. Но если 2 мерный или 3 мерный лидар вращается и если их на дороге сотня друга — то они забьют друг друга. Два могут избежать. Ведь это только случайность, что они бешенно вращаясь в какой-то момент будут смотреть в одну сторону. То есть тут да. Можно бороться с ложными срабатываниями через софт. А если их сотня? На оживленной автостраде?
Нет. Тут может только мой метод.LittleSquirrel
19.07.2016 23:37Извините, но все равно не верю.
Тестировались не 360 градусные радары, которые ставятся на крышу и вращаются, а «кирпичики», монтирующиеся в бампер с FOV ~150 градусов. Авто ставились на расстоянии 20-30 метров с расстоянием по осям в 6 метров, имитация езды навстречу по 2 полосам. Тестировалось долго, статика и движение. Помех мало.
Для описываемого Вами сценария помех необходимо чтобы каждый сенсор регулярно(каждый скан) облучался со множества позиций на дуге FOV. Для реализации такого сценария придется поставить сотни сенсоров «лицом друг к другу» по большому кругу. На мой взгляд не самая часто встречающаяся на дорогах ситуация.
С 360 градусными «вертушками» пожалуй чуть проще, но единственный проблемный сценарий который я себе могу представить — большая открытая парковка. Но на скоростях/дистанциях такого сценария вполне неплохо отработает ультразвук, так что проблема не критична.AlviGela
20.07.2016 00:13Любопытно. Можно узнать тип сенсора? Тогда дам определенный ответ.
Ультразвук вообще не опция. Я отбросил его после исследований. Я думаю Тесла именно на нем бьется и попадает в аварии когда лажает сонар. У ультразвука есть плохая особенность. Ему нужно перпендикулярное прямое препятствие. Под углом отражение уходит в сторону. По этой же причине летучие мыши не летают в городах. Это для них игра со смертью. Плоский симетричный мир созданный человеком не подходит для звуковой локации. Под углом к плоской поверхности не получите отражение. Врежетесь. Я спецом изучал этот вопрос. Подготвил интересную лекцию по этому поводу. А в пещерах и лесу где они живут неровности скал или деревья всегда дадут какое-то ехо. От уголка, неровности любой да отразится. Идеально плоских кубических вещей в природе нет.
Нет альтернативы лазеру в этом деле! Я уверен в этом.LittleSquirrel
20.07.2016 00:25Сенсоры примерно такие: http://www.autonomoustuff.com/ibeo
JustFYI: один из валидационных тестов для ультразвуковых систем — детекция цилиндрического столбика не очень большого диаметра. И системы его вполне проходят или уходят на доработку.AlviGela
20.07.2016 00:36Спасибо. Сейчас гляну.
Цилиндр — лажа. Он даст отражению по полукругу! Даже маленький цилиндр. Лишь не совсем уж тонкий. Как дерево в природе. Это проверка на чуствительность.
Надо под острым углом к стенке. А погляжу. Как они ложануться. Ультразвук не может под острым углом от гладкой стенки отразиться и вернуться к тебе. Уже опробовано. Купите недорогой звуковой дальномер и попробуйте померить под углом к стенке расстояние. Замучаетесь эхо получить.
А лазерной рулеткой сможете на раз.LittleSquirrel
20.07.2016 00:41Один из тестовых сценариев ультразвуковой автопарковки — мусорный бак в слоте. Насколько я помню машина там наезжает как раз на угол бака. Обычно проходится.
AlviGela
20.07.2016 01:00Не на угол надо. На стенку под углом. ) Угол, цилиндр — это не то.
Обычная гладкая стена. Скажем под углом тридцать градусов.
Сразу убедитесь о чем я говорю.
AlviGela
20.07.2016 00:57Прочел. Теперь понятно. Для начала:
Недостатки.
Чудовищная цена. А нужно для машины пять штук!0_0
30 сантиметров минимум. То есть для парковки не подходит.
Сканирование занимает до 80 миллисекунд. То есть 12-13 раз в секунду полный скан. Неплохо. Но это объясняет почему ваши два сенсора не попадали в друг друга. Уйма времени между сканами. Только когда сенсоров будет много это время — окно когда один сенсор занять считыванием с матрицы. а другой только посылает луч — оно будет драматически уменьшаться. Только представьте вы едете на оживленном шосе. Кажду минуту мимо вас проскакивают сотни машин! Вот это лоторрея! Да?) Ваш опыт с двумя это мало что показывает. Там по экспоненте будут помехи возростат от количества одновременно задействованных сенсоров и главное времени! Чем больше ездите, тем больше вероятность поймать помеху в унисон, которая смажет вам картинку. А поскольку у вас кирпич — это тольку увеличивает вероятность ее словить. А сенсоров у вас пять у одного авто. Так что умножаем и это на пять!LittleSquirrel
20.07.2016 13:00+1Во-первых, цена обычная для сенсоров такого класса и характеристик.
Во-вторых, 5 штук нужно в очень конкретном и достаточно экстремальном случае. Большинство OEM уже оценило что 5-6 сенсоров такого класса по кругу это жестокий перебор. В новых проектах такой будет 1 — фронтальный, остальные направления закрываются сенсорами попроще, типа Ibeo miniLUX, т.к. с боков и сзади 30-240 метров покрытия достаточно.
В-третьих, я не знаю где Вы нашли 30 мантиметровый минимум, официальный — 10 см, можно сделать меньше, если отключить некоторые функции. Но использовать эти сенсоры для парковки это примерно как мостить топовый телеобьектив для зеркалки к телефону.
В-четверных: 80 мс это одна из возможностей, обычно 25-30 герц используется. И это полное время скана, т.е. интервал между появлением данных на выходе из сенсора. По факту процессинг занимает ощутимую часть этого интервала.
В-пятых, выше я описывал наблюдаемый тип помех, целый «кадр» они точно не портят и алгоритмы такую помеху вполне вычищают. По нашим прикидкам помехи от чужих лазеров будут иметь нормальное распределение, что неплохо чистится.AlviGela
20.07.2016 15:32-1Да. Ужасная цена. Обычная ужасная цена. Гугл тоже поместил велодин стоимостью 75 тысяч баксов на крышу автомобиля приус стоимостью в 30 штук баксов. Ага очень впечатляет. Автоматическая езда только для богатых. Бедным — шиш. Поэтому я и предлогаю альтернативу виде очень — очень дешевого лидара. По своей природе дешевого. А как он хорошо подходит к грузовикам и автобусами!
30 сантиметровый минимум есть у них в ПДФ файле. Вы перепутали его с погрешностью в плюс-минус 10 сантиметров при измерении дистанции. Я не про это. Я про минимальное расстояние с которого он работает. То есть это дорогая штука не видит ближе 30 сантиметров от бампера. Это создает существенные помехи при парковке. ИМХО. И допустим у него будет другие сенсоры — дешевые спецом для парковки. Пусть даже ультразвуковые. Зато у меня для всей задачи одни. Все-таки преимущество.
Как я говорил при увелчиении частоты до 30 и возможность помех возрастет. Окно будет уменьшаться. В любом случае я настаиваю, что без эксперимента с десятком машин снующи туда-сюда на трассе в течении часов, ваш эксперимент) все же первое приближение. Время покажет кто был прав.
С вами интересно спорить. ) Разбираетесь в этом деле лучше других.
LittleSquirrel
21.07.2016 00:00+1Так что цена не массовая все уже осознали, именно поэтому последние год-два столько проектов на solid state laser без движущихся частей. И варианты таких проектов тоже есть разные, на любой кошелек.
Я не перепутал расстояние минимума, просто сенсоры тоже не стоят на месте. И такое ограничение вполне устраивает покупателей, т.к. для парковки эту штуку никто никогда использовать не будет. Посмотрите мой комментарий в конце на тему почему много сенсоров лучше одного.
Время конечно покажет, если я правильно помню в серию автомобили с «кирпичиками» в следующем году пойдут.
Я не так чтоб сильно спорить пытался, просто пытаюсь поделится скромным опытом разработки ADAS систем и ковыряния лидаров, в рамках NDA и правил приличия конечно. Было б интересно посмотреть идею, которую Вы так пропагандируете.
kaichik
20.07.2016 10:46Кстати, всегда было интересно, а забор с сеткой в такие тесты не входит?:)
LittleSquirrel
20.07.2016 11:25Там очень много тестов, поскольку это совсем не моя тема — увы не в курсе. Но забор с сеткой точно входит в тесты для лидаров.
qbertych
19.07.2016 12:42+2А вот с этого места давайте поподробнее. Потому что вы делаете как минимум три очень спорных заявления:
Они будут друг другу мешать! Это метод измерения time of flight.
Как раз time of flight никто не мешает замодулировать. Да, разрешение упадет, но принципиальная возможность остается.
Это метод измерения time of flight. Он не годится для несколько машин рядом.
Лидары в ближней зоне работают не на time of flight, а на фазовом методе. У TOF разрешения для этого не хватает.
каждыу будет видеть отблеск только своей частоты
Выше написал, почему это не работает.
Способ измерения СОВСЕМ ДРУГОЙ.
Ну вы намекните что ли. На голом слове верить вам никто не будет, тем более в немолодой области, рынок которой — число со многими нулями. Неужели гомодинирование рассеянного света изобрели? ;)AlviGela
19.07.2016 15:22/ Как раз time of flight никто не мешает замодулировать. Да, разрешение упадет, но принципиальная возможность остается.
Ха, три раза! Нельзя модулировать тайм оф флайт. Это глупость. Сам способ измерения — различные временные промежутки между посылкой и полученем ответки от отражения. Разные временные промежутки умноженные на скорость света и деленное на два. Как вы это замодулируете? Это бессмыслица. Причем я встречаю такой ответ очень часто.
Модулировать можно фазовое измерение. Только проблема в том, что у вас будет крайне низкое разрешение. Штука вращается. Бешенно! Чтобы узнать фазу вам надо облучать неподвижное препятствие хотя бы десяток миллисекунд!
У вас будет отвратительное разрешение, не говоря уже что это на меняющейся карте движения будет срываться на углах, которые едва задели — измерение фазы еще не завершено, а лучь соскользнул! Что вы будете делать?
Нет. Не принимается аргумент.
/ Ну вы намекните что ли. На голом слове верить вам никто не будет, тем более в немолодой области, рынок которой — число со многими нулями. Неужели гомодинирование рассеянного света изобрели? ;)
На ютубе есть видео работы моего первого прототипа. Самый простой. Нынешний будет в пять раз быстрее. Плюс ближняя зона будет в три ди! Тоже есть метод для этого. Метра три, пять. Это чтобы не въехать в зад негабаритного трнаспортного средства. Его контур может оказатья выше уровня ваших 2-мерных сенсоров. Просто проверка метода есть на ютубе. Спец сразу поймет что к чему. Будет первый скепсис. Как и у меня был. Я случайно наткнулся на этот способ реализации именно для авто. Делал совсем другое. И тут на! Такой потенциал у идеи. Офигел!
Да. И двухмерный лидар с помощью простейшего алгоритма может распозновать людей! По просвету между ногами.) Этакий бонсу вдобавок.qbertych
19.07.2016 15:55+1Прекрасно, очередной триангуляционный дальномер, коих на хабре было минимум два. Осталось рассказать,
— зачем нужно было выкидывать камеру и заменять ее на вращающийся фотодиод;
— как два мотора, лазерная указка и фотодиод могут стоить 250 долларов (на хабре получалось за 55);
— ну и наконец, где та магия, которая позволяет двум вашим чудо-дальномерам работать одновременно? ;)
(А про модуляцию ToF и просвет между ногами я ничего не скажу, потому что не способен комментировать это с серьезным лицом, простите.)AlviGela
19.07.2016 16:28-2)))) Ну вы даете! Причем здесь эта хрень с матрицей камеры и расчетом самого яркого пикселя?))))
Повеселили. Если этим 4 года занимаюсь, неужели не пришло в голову что это не так просто. Я же все таки могу догнать за три года, то что вы за несколько минут сделали. Я сам с первого раза очень скептично подошел к идее. Ожидаемая реакция. Зато когда случайно занялся! То там такое!
Более того. Занимаясь этим, я добрался до идеи измерения лазером нового типа! То есть спсоб измерения расстояния лазером КОТОРОЙ ЕЩЕ НЕИЗВЕСТЕН НИКОМУ!
Правда он нафиг никому не нужен, бо медленный слишком. Но вообще да. ПРИНЦИПИАЛЬНО НОВЫЙ СПОСОБ. Не каждый день такое происходит. Да?) Тайм о флайт, фазовый, триангуляция… Что там еще?) А есть оказывается и еще один способ. Когда глубоко копнешь имено там. Натыкаешься на него.
Не недооценивай людей. Также высокомерно к Тесле обрашались, когда он свой переменный ток предлогал. Там очень глубокая начинка как это нужно делать. И секреты все в моей голове. Я уже сотню экспериментов поставил. То что вы видете на видео это просто проверка, чтобы не было бла-бла просто. Исследуется возможность. А реальный автосенсор там уже по-другому.iliasam
19.07.2016 16:52То есть спсоб измерения расстояния лазером КОТОРОЙ ЕЩЕ НЕИЗВЕСТЕН НИКОМУ!
Тайм о флайт, фазовый, триангуляция… Что там еще?) А есть оказывается и еще один способ
Вы случаем не про «рециркуляционный дальномер», в котором фотодиод и лазер соединяются через инвертор, а дальность определяется за счет измерения частоты возникших колебаний? На них и патент есть.AlviGela
19.07.2016 17:45Спасибо большое за ссылку. Интересно. Копаться в огромной патентной базе у меня никогда не хватало терпения. Удивительно что и такая идея у меня была. Так действует лазерная рулетка Бош.)) Я сам хакнул ее, а до этого додумался до такой идеи! Сам! Какой-то хмырь с инета убедил меня что в рулетке фазовый метод. Но концы с концами не сходились, когда ее разобрал. У него не фазовый метод. И мне пришлось его заново изобретать! Реально. Как только додумался до него, хоп, понял что поздно. В рулетке именно это и реализовано. Но!)
Не то.
Дело в том, что этот новый способ, реально новый способ. Он бессмыслен по качеству. Кому нужны 5-10 измерений в секунду с довольно фиговым разрешением? Причем от расстояние оно становится хуже!)) Но прикольное что никто до сих пор не додумался. Все-таки реально новый способ.) Свой особенный. И простой. Мама не горюй. Я на коленке сбацал, чтобы проверить. Не знал что так можно. На ардуино можно сделать без проблем. И не триангуляция. Что-то свое. Не знаю как объяснить не раскрыв секрет.) Как не скажу. Хоть и бесполезная вещь, но новый способ! Такое не каждый день происходит, что изобретается(пусть не нужный) способ измерения лазером расстояния.iliasam
19.07.2016 18:11+1Не такой уж этот принцип ненужный, если с его использованием делаются реальные дальномеры: http://www.acuity.ru/resources/principles-measurement.shtml
Я тоже делал реверс-ижиниринг рулетки BOSCH PLR15, там используется именно фазовый принцип. Возможно, вам попалась рулетка с другим принципом работы.
В видео у вас явно триангуляционный принцип, подобная система (с двумя сканирующими системами) уже ранее на робофоруме упоминалась.AlviGela
19.07.2016 18:24-2Конечно у меня триангуляционный способ. Триангуляция известна 3000 лет. Я не могу на нее претендовать. Хоть она и с лазером. Это все та же самая триангуляция.
Только вопрос как это делать для автомобиля! Вот здесь начинается самое интересно.
Как действует Бош. Хотите расскажу?
Каждый посланный импульс возращаясь инициирует запуск нового. То есть обратная связь. Вы как бы по кольцу гоняете: послал импульс, подождал ответку, ответка заставила стартовать новый импульс. И вот долю секунды. Один импульс ничего не даст. Слишком быстро. Зато тысяча или двадцать тысяч. Но вот такая серия, которая будет сравнена с серией через шторку. (если вы разбирали бош, там есть шторка отклоняющая луч на лавинник) 100 миллескунуд импульсов на шторку сравнивают количество импульсов от препятствия за те же 100 миллисекунд. Можно и время вместо количества импульсов. Эта разница и дает такое точное расстояние.
Вы ошиблись. Хороший спец, Блестящий. Но горе от ума. Слишком умный. Там рециркуляция о которой мне тут сказали. И которую я изобрел сам, не зная о ней. Вернувшийся импульс запускает новый. И так по кругу. Поэтому там банд пас на входе после лавинника стоит. Не за тем чтобы низкую частоту выделять. Как вы ошибочно решили. Видел ваше видео. Хорошая работа. Но зашли не туда. А одна ошибка повела другую. ))iliasam
19.07.2016 20:14+1У той рулетки, что я разбирал, был очень специфичный датчик (что-то вроде SoC), содержащий два фотодиода и управляющую логику (с нее шел и сигнал модуляции лазера).
Никакой шторки в этой рулетке не было, свет от лазера отражался элементами конструкции на один из фотодиодов датчика.
С этого датчика по SPI на микроконтроллер шли пакеты с уже обработанной информацией. Большую часть из них занимали синусоидальные сигналы от двух фотодиодов. При изменении расстояния до объекта фаза между сигналами явно менялась. Из данных явно было видно, что дальномер использует несколько частот (явно больше 4), и частота модуляции превышает 300 МГц.
Посмотрите фотографии из этой статьи.
Там использован обычный APD, нет никакой шторки, зато есть CKEL925 — сдвоенный PLL генератор. Из фотографии явно видно, что использованы оба выхода генератора, то есть в дальномере явно смешиваются две частоты. Видно, что особый упор сделан только на ВЧ разводку сигналов от генератора, т.е. сигнал от APD — уже низкочастотный.AlviGela
19.07.2016 20:19Ok. Возможно я перепутал вас с кем-то. Буду знать что есть и без шторки у Боша. Но со шторкой точно рециркуляция.
qbertych
19.07.2016 18:07+1Свежие новости! Принципиально новый способ! Секретная формула «база + два угла», ни разу не называвшийся триангуляцией и никогда не применявшийся ни в стереотрубах, ни в геодезии, ни в астрономии!
Секреты, так уж и быть, пусть остаются у вас в голове — и про чародейство одновременной работы, и про магию отката в 80%.AlviGela
19.07.2016 18:30))))
Да какие свежие? Видео уже год с лишним.
Зато я веду переговоры с немецкой фирмой. Если выгорит. Вот тогда будут свежие новости.)))

Bluewolf
20.07.2016 12:11+2Простите, что вмешиваюсь, но дам совет. Я лично не знаю, есть у вас стоящие наработки или нет (вполне допускаю как тот, так и другой вариант), но конкретно с таким способом общения-донесения информации вам будет очень трудно. Проблема в тоне, оборотах, громких заявлениях, восклицательных знаках, очень пугающих инвесторов фразах «ПРИНЦИПИАЛЬНО НОВЫЙ СПОСОБ» и другом. Если вы в подобном виде пишете письма, неудивительно, что они попадают в спам.
Рекомендую быть спокойнее, более обстоятельно и неторопливо рассказывать интересующимся, в чем преимущества и особенности метода, найти партнера-менеджера, который умеет общаться с людьми и компаниями, в конце концов. И тогда шансы на успех будут значительно выше.
Да, и не надо бояться, что ПРИНЦИПИАЛЬНО НОВУЮ идею кто-то украдет. Идея-то ничего не стоит, стоит проработка темы и те знания и данные, которые вы получили за три года (если они действительно имеют ценность). И сделайте адекватный прототип, из которого хотя бы в принципе видны преимущества, пусть и после доработки, без прототипа никто всерьез воспринимать не будет.AlviGela
20.07.2016 15:14-2Спасибо за совет, конечо. Но вам для начало надо в моей шкуре побывать. И так и так все перебровано. И вежливо, и невежливо, и с прототипом и без. Проблема что это кажется наивным. Надо хорошо об этом подумать, тогда и до спеца доходит преимущества. На счет раскрытия деталей. Ну да. Раскрою детали, все опищу. И? Уйду в небытие? Нафиг я это делаю вообще тогда? Я еще писатель-фантаст, могу книжки тогда писать, не занимаясь изобретательством.
Буду конечно прототип делать, вещать на реальное авто и кидать ролики в ютуб с работой.
В любом случае спасибо.
И да, скромностью на Западе немного добьешся. Вас скромно облапошат, или скромно пошлют по адресу. Здесь надо себя рекламировать. Агрессивно. Если вы не уважаете себя или скромничаете по поводу важности вашего изобретения — то и противоположная сторона будет это делать. Это не Советский Союз, где скромность считалось за достоинство. Это капитализм, Батенька! Тут тебя съедят не успеешь опомниться.Bluewolf
20.07.2016 22:09+2А я и так, вероятно, в шкуре близкой к вашей, и много чего делал и делаю и сам, и как часть компании. То, что стены в целом очень толстые, даже если все делать совершенно правильно, я прекрасно понимаю. Только с помощью некоторых вещей (описанных выше) их можно сделать разве что еще толще, увы.
Раскрытия деталей я тоже когда-то боялся, сейчас давно уже нет, мой-то опыт и наработки останутся со мной, это очень трудно «раскрыть» полностью даже специально. Да и насчет деталей, не надо ВСЁ раскрывать, надо сделать так, чтобы заинтересованным лицам было в принципе понятно, что за этим что-то есть. Сейчас из ролика на ютубе этого понять нельзя. Можно доказывать с помощью прототипа, можно — какими-то дозированными пояснениями, но по сути, а не просто заявлениями. Просто словами «у меня есть офигеннная технология» продать кота в мешке невозможно в принципе, ни инвесторам, ни компаниям, поверьте.
Дело не в скромности, а в некоторых правилах игры. Некоторые вещи (опять же, описанные выше), просто несколько усложняют вам же возможность дальнейшего конструктивного общения, только и всего. Интересный прототип — очень приближает. А уважать себя надо, конечно.
Кстати, если у вас реально стоящая технология, есть реальная возможность коммерциализации и серьезного инвестирования. Раскрывать секреты не нужно, но внятно объяснить преимущества и как-то их продемонстрировать будет нужно, да. В личку, если интересно.
AlviGela
19.07.2016 16:45-1Кстати, если не знали. Камера имеет частоту кадров. 50 Герц к примеру. Это значит что с камерой можно только пятьдесят точек в секунду. То есть у нас разрешение сканирования: 360/50. В секунду! Что за жалкое разрешение для движущегося авто? Кому оно нужно? С лавинным фотодидом, мой (уже реальный сенсор) делает 5 раз в секунду с разрешением в 1 градус! И может менять взависимости от обстановки моментально! Перестройка частоты, протокол( я назвал его протокол большого брата!)) Там сотня разных подробностей. Изобретений в изобретении.
Не думайте что это так просто. В мире немного людей способныйх ловить отраженный лазерный луч. Он увядает в четвертой степени! Нужно быть очень незаурядным человеком, И дьявольски работоспособным чтобы в домашних условиях сделать приемник ловяший безопасный для глаз лазер первого класса в 1 милливат. Это вам не готовая камера 50 Герц. )) Тут нужно из штанов выпрыгивать. Высоко.)
kaichik
19.07.2016 10:33Крутой комментарий, буду добавлять в исходный пост. А лидары в интервале 5-20 Hz сохраняют одинаковые параметры по точности и разрешающей способности?
Радары — да, и еще только они допускают установку за радиопрозрачными кузовными элементами (под бампером например).
По sensor fusion, имею только общее представление о форматах данных с разных источников, на полноценную статью точно не потянет. Может у вас больше опыта?LittleSquirrel
19.07.2016 11:00+1Сканирующие лидары сохраняют. Велодайн с картинки мы используем на 10 герцах как reference sensor для валидации наших собственных. «Кирпичики» изначально расчитаны на работу на 20-30 герцах, это их штатный режим.
Установка сенсора это вообще огромная беда и проблема, потому радар и камера тут в сильном выигрыше.
Sensor fusion — моя основная тема последние пару лет, именно потому мне сложно об этом рассказывать.
Idot
19.07.2016 07:42Словосочетание «дешёвый лидар» — звучит пугающе. Потому что в погоне за дешевизной — могут запросто забыть о безопасности, и «ведёрко гугл» от неизвестного noname производителя, расположенное на уровне глаз водителей и пешеходов, может оказаться способным вызвать серьёзные ожоги сетчатки глаз. Которые имеют кумулятивный эффект: небольшой ожог зрительный отдел мозга постарается «замазать фотокоррекцией», и потому человек мелкое повреждение сетчатки не замечает, но когда их становится слишком много то зрительный отдел мозга перестаёт справляться с «постобработкой», и наступает резкое внезапное ухудшение зрения.
LittleSquirrel
19.07.2016 09:39+1Не переживайте, «ведерко на крыше» никогда не будет дешевым. Основная стоимость сканирующего лидара в оптике и очень точной механике, при отсуствии того или другого просто поднятием мощности компенсировать потерю производительности сложно. «Дешевый лидар» будет, в первую очередь, без подвижных частей. Почти все существующие лидары это лазеры класса 1.
qbertych
19.07.2016 12:53Лазеры класса 1 в неплохих лидарах и правда удивили.
А есть ли способы избавиться от подвижных частей кроме акустооптики?iliasam
19.07.2016 16:33+2Вот Quanergy пытается сделать такой лидар.
AlviGela
19.07.2016 16:50-2Спасибо тоже. Не видел этого. Но парень опять забыл, что будет, если рядом окажется такой же радар. В отличии от вращающегося у которого может случаится что он и другой смотрять в одну сторону, этот будет просто забит помехами.) Парень бессмысленно переводит ресурсы мозга. Впустую. А жаль. Хороший программер явно.
iliasam
19.07.2016 17:09Импульсные дальномеры могут отсекать помехи от других дальномеров, используя временное разделение сигналов. Возможно, можно также сортировать импульсы по их длине.
AlviGela
19.07.2016 17:26-1Поясните. Я дока в этом деле, пока не нарвался на вас. Тайм оф флайт измеряет ВРЕМЯ. То есть эта бодяга ему самому нужна. Поэтому манипуляция с ней невозможна. Никакого разделения. Что вы имеете в виду? Вы либо модулируйте, либо меряйте временем. Но только одно из двух.
Если бы это было бы возможно, то как это:
https://www.theguardian.com/technology/2015/sep/07/hackers-trick-self-driving-cars-lidar-sensor
Или это:
http://www.telegraph.co.uk/technology/news/11850373/Self-driving-cars-can-be-hacked-using-a-laser-pointer.html
Надеюсь так понятно?
Вы меряете временем. Оно разное, от расстояния.
Причем здесь модуляция? Она вам не даст померить. Нужно будет мерить, потом ждать пока другая машина померяет иначе помеха. Этакий протокол связи. Мутняк. Глупо. И медленно.
Зато у меня. Ммм. Сладкая вундервафля.)iliasam
19.07.2016 17:52Все как во временном разделении каналов связи. Если дальномер делает 25000 измерений в секунду, то на одно измерение дальномер имеет 40 мкс. Но само измерение занимает намного меньше времени, не больше нескольких микросекунд. Так что в одни промежутки времени может делать измерения один дальномер, в другие — другой. Промежутки могут определяться случайным образом. В таком случае иногда дальномеры будут все же мешать друг другу, но вероятность такого события уменьшается за счет вращения (пространственное разделение).
AlviGela
19.07.2016 18:06-1Разумно. Только помехи все равно не исчезают. В эти 40 микросекунд вам помещают 40 раз. И вы не можете расчитвать время на измерения. У вас время дает РАССТОЯНИЕ. Вы не может его ограничивать. Так понятно?
И вам нужно протокол связи с авто. Думал над этим. Он по любому нужен. И у меня он тоже есть. В моей схеме.
Но тайм оф флайт однозначно не годится. Увольте. Я там все прорыл. Нет там способа избежать помех надежного. В этом и проблема. Поэтому и завязли наши лидаршики. Не видят очевидного под ногами. И я не видел. Только случайно занялся этим.
AlviGela
19.07.2016 18:02-1На счет длины импульса. Приходило в голову и это. Только беда. Что значит длина импульса? У вас сработал лавинный фотодиод! Он сразу рвет через себя все что может. Высоковольтное байаз(сорри не знаю как по русски) напряжение пробивает он сразу насыщается. На то он и лавинный диод называется. А ему бедному еще очухаться нужно. Время релаксации надобно! Для нового измерения. Фиг тут с длинной импульса поколдуешь.
А вот у меня можно длине импульса. Бо мне не критично сколько времени летел луч. Мне на это плевать. И частотой различить можно. И активный фильтр с электронным потенциометром можно вставить, чтобы частоту менял и не мешал, как сотовый, подстраивался под свой излучатель.
Эх. Мне был лабороторию. Да команду из нескольких человек.
Убил бы всех на рынке автолидаров. Просто убил бы.))
qbertych
19.07.2016 17:44Красота. Наконец-то нашлось применение для матриц VCSEL :)
LittleSquirrel
19.07.2016 23:46Способы избавится есть, как минимум несколько. Это сейчас очень большая тема, т.к. большинство производителей осознали что лидар с движущимися частями слишком сложен в производстве. Однозначно выигрывающей технологии пока нет, но к 18 году будет сразу несколько продуктов использующих разные принципы, посмотрим кто победит.
qbertych
20.07.2016 10:58А можете рассказать про них? Матрицы лазеров, DMD/SLM, акустооптика, что-то еще?
А самое главное — есть ли что-то (кроме матриц), что стоит не как крыло от боинга? ;)LittleSquirrel
20.07.2016 13:15Есть еще как минимум решения на фотоэлластичности, по типу PEM, микролинзы, дающие рассеяние по лучам…
Все, кроме микролинз, очень экспериментально и потому безумно дорого. Но там очень хорошие перспективы для серийного производства.qbertych
20.07.2016 16:42Хм, а на микролинзах красиво получается. MEMS — наше все :).
LittleSquirrel
20.07.2016 23:39MEMS пока выбран за основу как минимум у двух достаточно неплохих продуктов, года через 2 увидим насколько этот выбор оправдался.
AlviGela
19.07.2016 15:30Ведерко с 75 тысяч пять лет назад. Уже стоит 5-6 тысяч. Есть такие новые дешевые версии.
Но проблема не дешевизна. Помехи. Вот ее слабость. Она становится очевидной при массовом использовании на дороге.kaichik
19.07.2016 16:14Ведерко за 5-6 тысяч — другое, с худшими возможностями. Топовые лидары как стоили 70 тысяч, так и стоят.
Более дешевые лидары тоже используют, так их и нужно несколько штук.
AlviGela
19.07.2016 15:29Не-не. В три ди лидаре велодина или другого лазер сильно рассеянный. То есть это не луч, а вспышка с большим охватом. Чтобы ССД матрица лавинных фотодидов могла поймать каждый свое отражение. Для глаз она абсолютно безопасна. Разве что вы подойдете совсем в упор и через оптику глянете. Она расфокусуирована. Это не узкий луч! Вдобавок вспышка длится микросекунды. Дальше лазер поворачивается на пол-градуса и уже соскальзывает. Нереально этим кому-то навредить.
iliasam
19.07.2016 16:26Немного поправлю — длительность импульса в таких дальномерах составляет единицы или десятки наносекунд, а мгновенная мощность может превышать 100 кВт, хотя общая энергия импульса при этом не очень большая.
В случае с 2D сканерами луч все же сфокусирован.AlviGela
19.07.2016 16:59Да. Я знаю. Наносекунды. Подумал о своем. У меня микросекунды. У них потому это матрица фотодиодов стоит целое состояние. Такая быстрая матрица лавинников — это ой-ой. Разоришься!
В случае 2Д да правильно узкий луч. потому я и использую безопасный для глаз 1 миллиаватный. И то он в контакт с глазом может только на микиросекунду попасть. Скорость вращения 5-6 Герц. Плюс модуляция. То есть делим на два время облучения в этот короткий промежуток времени.
В общем там можно и второго класса без всяких последствий юзать. Да и на уровне бампера скан идет. Кому-то спецом надо на четверенки встать, чтобы попасть по луч. Безопасный. Ничего не будет, даже в этом случае.
naething
19.07.2016 08:05Автопилот в Тесле назван неудачно (ну или наоборот удачно, с точки зрения маркетинга). По задумке это просто продвинутый круиз-контроль, по-прежнему обязующий водителя держать руки на руле и сохранять бдительность (понятно, что на практике это далеко не всегда соблюдается). Поэтому не очень понятен разговор про Теслу в контексте автономных автомобилей. Лучше смотреть на гугловские машины, которые уже ездят по улице. Убер тоже активно ведет разработку в этой области, даже выманили кучу профессоров из Карнеги Меллон (CMU) с этой целью. Если верить интернету, они уже тестируют свои технологии в Питтсбурге: http://qz.com/688003/ubers-self-driving-cars-are-on-the-road/

Kain_Haart
19.07.2016 10:58+1по частотам (от ультразвука к лидарам).
Как вы сравниваете частоты звука и света?
chouck
20.07.2016 16:04Т.е. все усилия и талант брошенные George Hotz («chffr» http://comma.ai) в автопилот на камерах тщетны априори?
LittleSquirrel
20.07.2016 23:51Не тщетны, просто как только они достигнут хорошего рабочего уровня — начнут разбавлять дополнительными сенсорами. Это не самый плохой подход.
Автопилот на одном сенсоре/одном типе сенсоров вообще сделать очень сложно. Кроме явных недостатков у каждого из типов в игру вступает прелестная вещь зовущаяся functional safety и сертификационные требования следующие из этого.
Сильно упрощая: автопилот придется сертифицировать по высшему классу, ASIL D. Это достаточно суровые требования, немногим ниже запросов к авионике самолетов, например. Когда сенсор один, а система линейна, без параллелей, — все компоненты должны соответствовать этому уровню сертификации. Когда в системе несколько разных сенсоров, да еще и данные обрабатываются параллельно, можно сделать ASIL decomposition и сертифицировать сенсоры и подсистемы на более низкий класс за счет возникающей из-за параллелизма редундантности.
Например при двух сенсорах можно сделать ASIL D = ASIL B(D) + ASIL B(D) и сильно сэкономить на обьеме работы и последующей валидации.




SinsI
Как-то сомневаюсь насчёт правильности про лидары — технология новая, неопробованных вариантов, потенциально решающих их проблемы — вагон и маленькая тележка, сколько-нибудь серъёзных игроков вообще нет.
Так что вероятность революционного «серого лебедя» крайне велика, да и просто могут подключится какие-нибудь тяжеловесы вроде Intel, обладающие компетенцией в сверх высокоточных технологиях, которой нет у теперешних лидеров рынка, и могущие радикально удешевить лидары просто за счёт производственных возможностей.
kaichik
Минусы каждого из датчиков отражают сложности фундаментальных направлений, вложения в которые измеряются миллиардами долларов и многими годами разработки. Проблема лидара грубо говоря в том, что создать столь высокоточную оптику задешево и в больших количествах нельзя, у человечества нет для этого технологий.
Та же история с пластинами для процесоров — чем больше пластина, тем дешевле процессор, а объем производства вторичен. С сапфировыми стеклами то же самое: вам нужно физически увеличивать размер сапфира, отсюда падение стоимости, а не от масштаба производства как такового.