
Часть первая — Affinity propagation
Часть вторая — DBSCAN
Часть третья — кластеризация временных рядов
Часть четвёртая — SOM
Self-organizing maps (SOM, самоорганизующиеся карты Кохонена) — знакомая многим классическая конструкция. Их часто поминают на курсах машинного обучения под соусом «а ещё нейронные сети умеют вот так». SOM успели пережить взлёт в 1990-2000 годах: тогда им пророчили большое будущее и создавали новые и новые модификации. Однако, в XXI веке SOM понемногу уходят на задний план. Хоть новые разработки в сфере самоорганизующихся карт всё ещё ведутся (большей частью в Финляндии, родине Кохонена), даже на родном поле визуализации и кластеризации данных карты Кохонена всё чаще уступает t-SNE.
Давайте попробуем разобраться в тонкостях SOM'ов, и выяснить, заслуженно ли они были забыты.

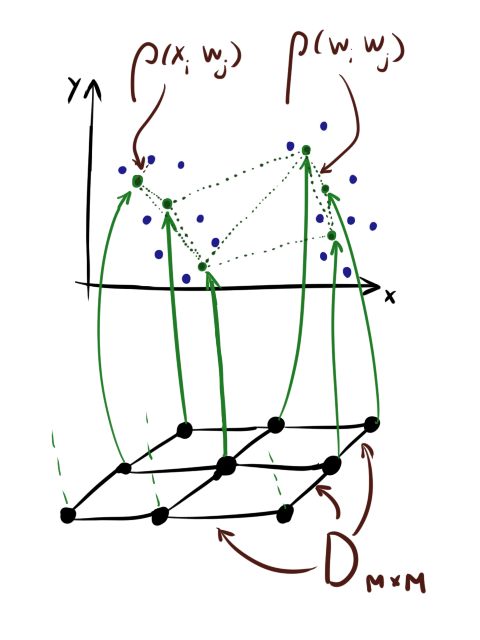
Вкратце напомню стандартный алгоритм обучения SOM[1]. Здесь и далее () — матрица со входными данными, где — количество элементов в наборе данных, а — размерность данных. — матрица весов (), где — количество нейронов в карте. — скорость обучения, — коэффициент кооперации (см. ниже), — количество эпох.
() — матрица расстояний между нейронами в слое. Обращу ваше внимание, что последняя матрица это не то же самое, что . Для нейронов есть два расстояния: расстояние в слое () и разница между значениями.
Также обратите внимание, что хоть нейроны часто для удобства рисуются так, будто бы они «нанизаны» на квадратную сетку, это совсем не означает, что и хранятся они как тензор . Сетку олицетворяет .
Введём сразу и — показатели затухания скорости обучения и затухания кооперации соответственно. Хоть строго говоря они и не обязательны, без них почти невозможно сойтись к достойному результату.
Алгоритм 1 (стандартный алгоритм обучения SOM):
Вход: , , , , ,
Каждую эпоху обучения мы перебираем элементы входного датасета. Для каждого элемента мы находим ближайший к этому нейрон, затем обновляем его веса и веса всех его соседей по слою в зависимости от расстояния до и от коэффициента кооперации . Чем больше , тем больше нейронов эффективно обновляют веса на каждом шаге. Картинка ниже — графическая интерпретация шагов А1.2.2.1-А1.2.2.4 для случая, когда большой (1) и когда малый (2) при одной и той же скорости обучения и ближайшем векторе.
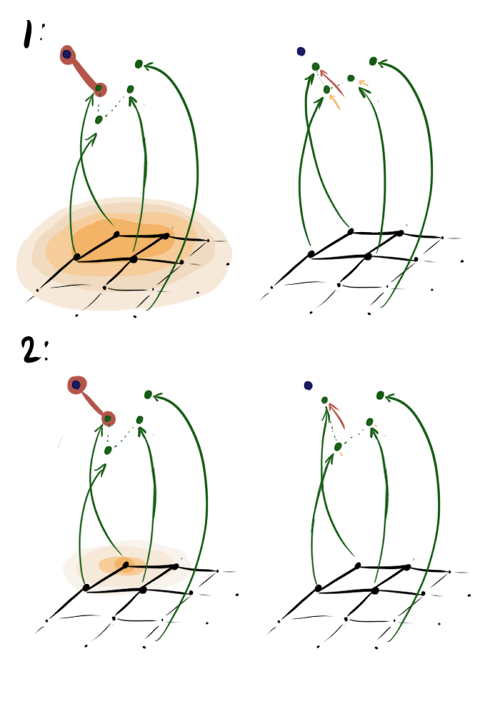
В первом случае близки к единице, и к двигается не только ближайший вектор, но и его первый сосед и даже, чуть меньше, второй сосед. Во втором случае те же соседи двигаются совсем чуть-чуть. Заметьте, что в обоих случаях четвёртый вектор с таким же от ближайшего вектора, но с гораздо большим не двигается.
Несколько эпох обучения карты Кохонена для наглядности:

Если моего краткого напоминания алгоритма оказалось недостаточно, прочитайте эту статью, где шаги в А1 рассмотрены более подробно.
Таким образом, основные идеи SOM:
Сразу напрашивается несколько тривиальных модификаций:
Чуть менее очевидная модификация самоорганизующихся карт, в которой состоит их сила и уникальность, но про которую постоянно забывают, кроется в этапе инициализации и . Слой Кохонена в примерах постоянно изображают как сетку, но это ни в коей мере не обязательно. Наоборот, всячески советуется подстраивать взаимное расположение нейронов () в слое под данные.
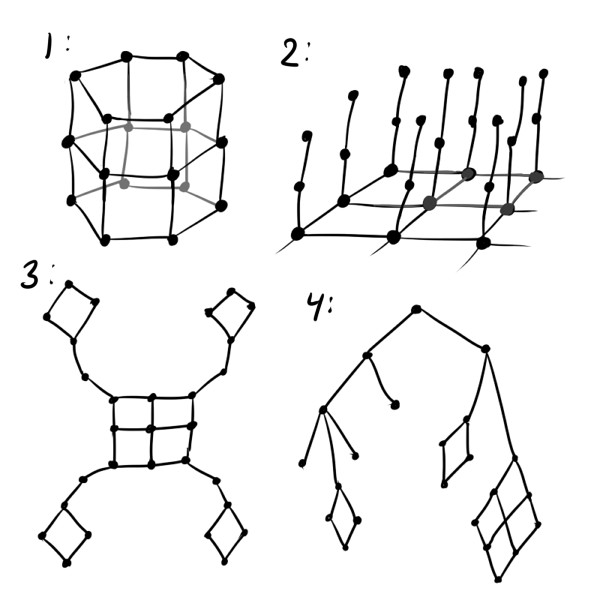
Как минимум, вместо обычной сетки лучше использовать гексагональную: квадратная сетка искажает результаты в пользу прямых линий, да и менее приятна на вид чем шестиугольная. Если предполагается, что данные циклические, стоит инициализировать , будто нейроны находятся на ленте или даже на торе (см. рис. ниже, номер 1). Если вы пытаетесь вместить в SOM трёхмерные данные, которые заведомо не ложатся на гиперскладку, следует воспользоваться структурой «ворсистый ковёр» (2). Если известно, что какие-то кластеры могут далеко отстоять от других, попробуйте «лепестковую» структуру слоя (3). Совсем хорошо, если известно, что данные имеют некоторую иерархию: тогда можно в качестве можно взять матрицу расстояний графа этой иерархии (4).
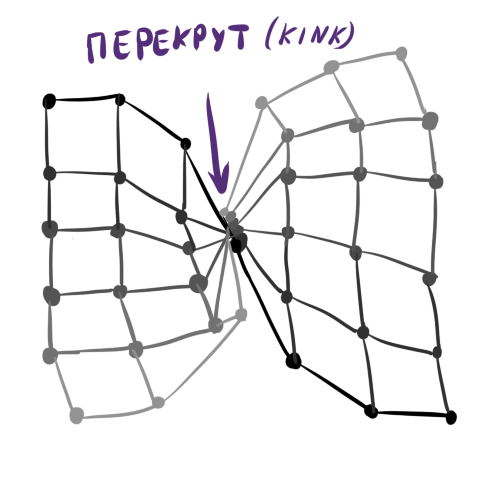
В общем, ограничивается вашей фантазией, знанием о данных и удобством последующей визуализации нейронов. Из-за последнего фактора не стоит делать, например, кубический слой Кохонена. Утверждение собственного порядка между нейронами — мощный инструмент, но следует помнить, что чем сложнее структура , тем сложнее инициализировать начальные веса в и тем больше вероятность получить на выходе так называемый перекрут (kink) в слое Кохонена. Перекрут — дефект обучения, когда глобально соответствует и данным, за исключением некоторых особых точек, в которых слой перекручивается, неестественно растягивается или делится между двумя кластерами. При этом выбраться из этого состояния алгоритм обучения SOM не может, не разрушив уже устоявшейся структуры. Несложно увидеть, что перекрут — аналог глубокого локального минимума в обучении обычных нейронных сетей.
Абстрактный пример классического перекрута:
Пример перекрута на синтетических данных при попытке вписать длинную кривую в кластеры. Верхний левый и правый лепестки выглядят правдоподобно, но выделенное место портит порядок.

Инициализируя веса в слое случайным образом, вы практически гарантируете себе плохой результат на выходе. Необходимо сконструировать таким образом, чтобы в каждой конкретной области плотность нейронов приблизительно соответствовала плотности данных. Увы, без экстрасенсорных способностей или дополнительной информации о датасете сделать это довольно сложно.
Поэтому часто приходится делать так, чтобы нейроны просто равномерно рассеялись по всему пространству данных без пересечений (как на рисунке посередине), и мириться с тем, что не во всех областях плотность нейронов будет отвечать плотности данных.
Эта идея была изначально предложена Кохоненом[1], а затем обобщена его последователями[4]. Что если отнимать или прибавлять к обновлению нейрона-победителя обновления его соседей? Математически это выглядит так: шаг А1.2.2.4 для нейрона победителя заменяется на
Где — параметр расслабления. Обновления остальных нейронов остаются без изменений либо к ним добавляется часть расслабляющего слагаемого. Звучит странно; получается, что если и у нейрона много соседей, то он может даже откатываться назад от ? Если не применять ограничение сверху на длину вектора, так и есть:
При отрицательном нейрон как бы подтягивает к себе своих соседей, а при положительном, наоборот, стремится выпрыгнуть из их окружения. Разница особенно заметна в начале обучения. Вот пример состояния SOM после первой эпохи для одинаковой начальной конфигурации и отрицательном, нулевом и положительном соответственно:
Из-за описанных выше эффектов нейроны разлетаются более широким веером, при — вытягиваются. Соответственно, в первом случае покрытие будет более равномерным, а во втором — больший эффект будут иметь малые обособленные кластеры и выбросы. В последнем случае в верхней части графика также видно возможный перекрут. В литературе советуется , но я обнаружил, что хорошие результаты можно получить и при гораздо больших по модулю значениях. Обратите внимание, что в добавленное слагаемое входит , которое, в свою очередь, зависит от . Следовательно, вышеописанный приём будет играть большую роль в начале обучения — на этапе сотрудничества.
Часто случается так, что после основного цикла алгоритма оказывается, что хоть нейроны SOM и прицепились к чему-то, их плотность на кластерах вполне сравнима с плотностью в местах, где кластеров нет. Проводить анализ в таких условиях довольно сложно. Нарни Манукьян и команда предлагают[5] довольно простое решение: вслед за основным алгоритмом запускать ещё один цикл подгонки нейронов.
Алгоритм 2, Cluster refinement phase (фаза подстройки кластеров):
Вход: , , , , ,
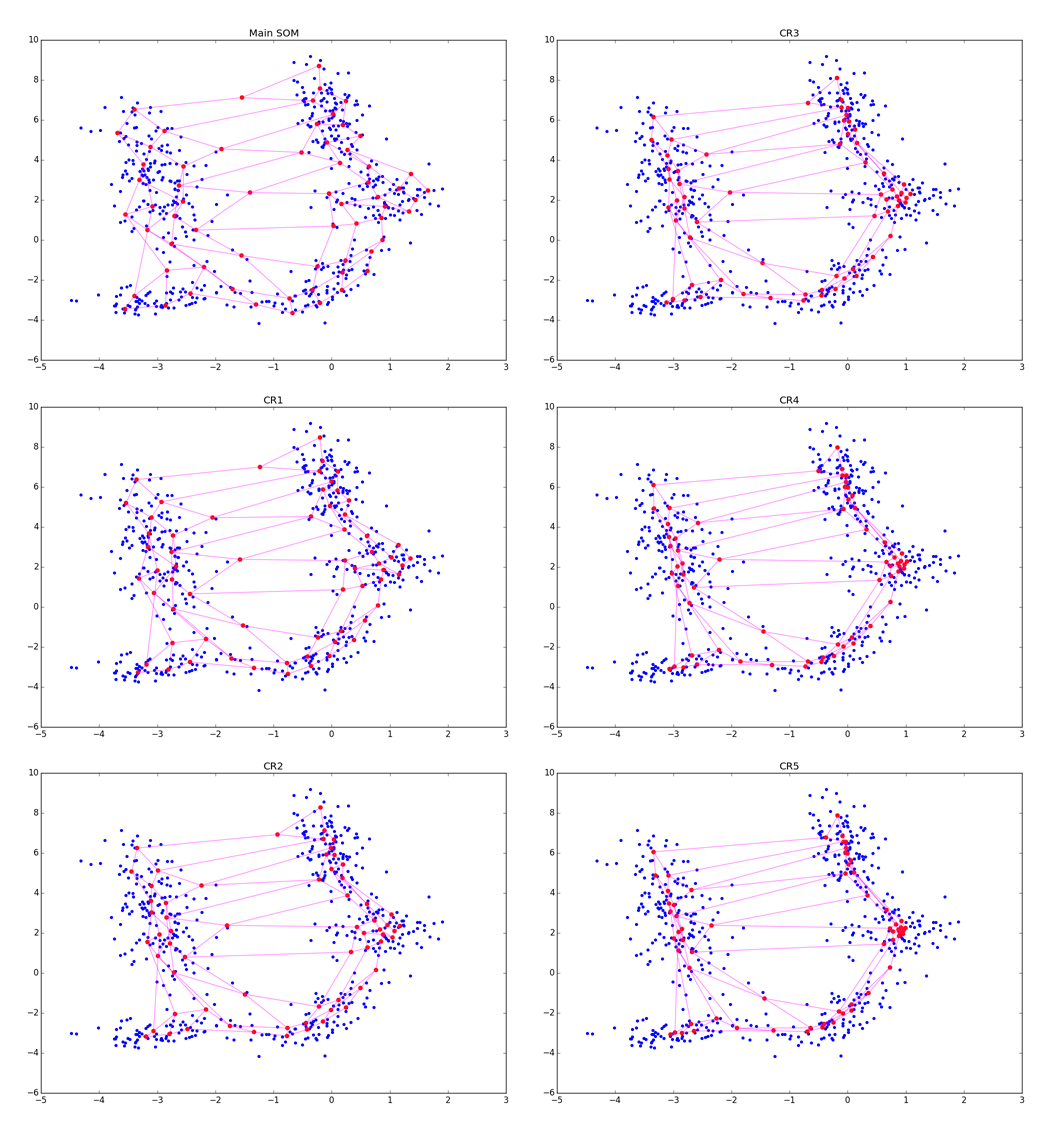
Хоть алгоритм выглядит и очень похоже на А1, обратите внимание, что теперь мы не ищем ближайший нейрон, а просто пододвигаем все нейроны к . Из-за взаимодействия в экспоненте в A2.2.2.2 и на этапе обновления весов изменяются по сути только нейроны, находящиеся в определённом кольце от . Для наглядности посмотрим на пять эпох подстройки:
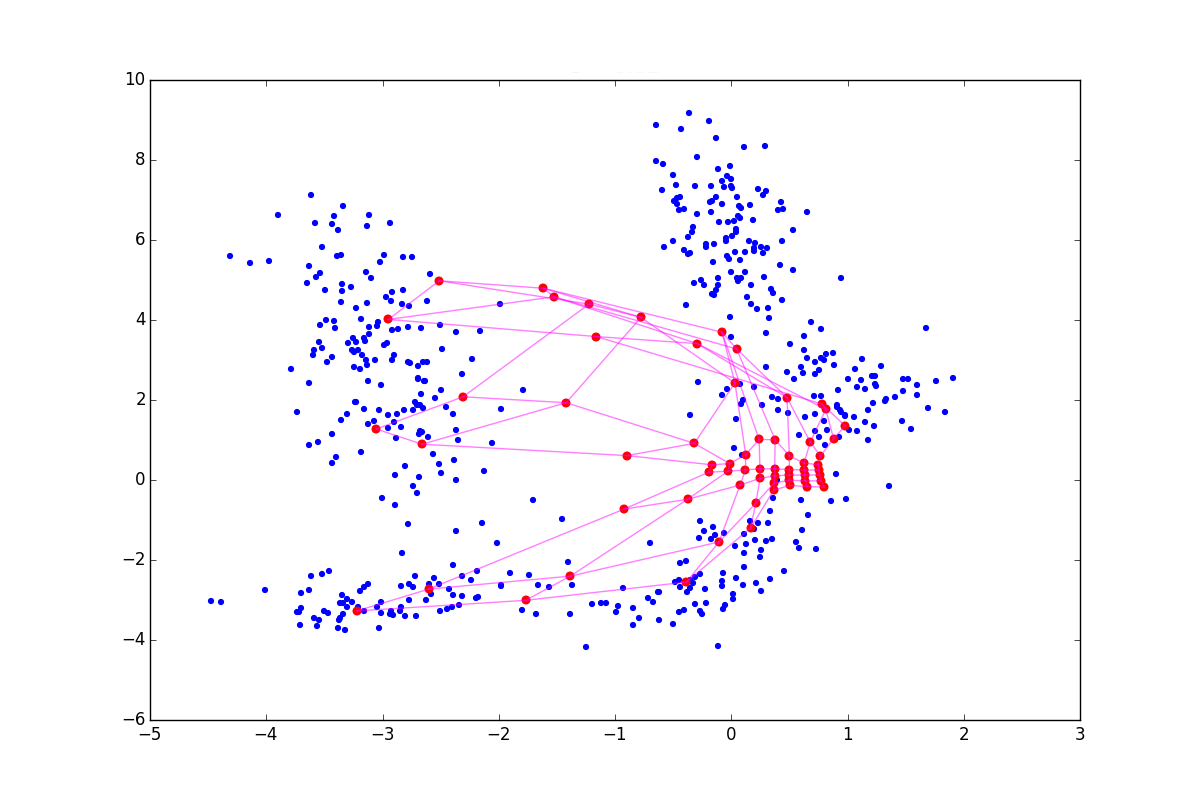
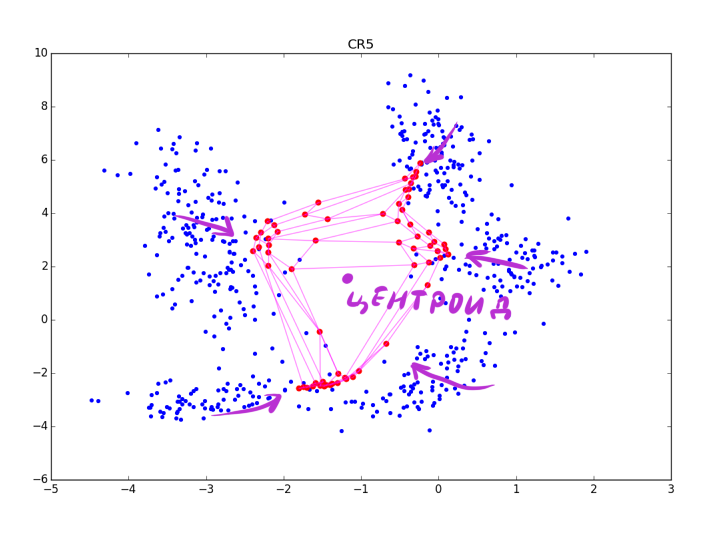
Аккуратнее: чем сильнее подстройка в CR-фазе, тем лучше видны кластеры, но тем больше теряется локальная информация о форме кластера. После нескольких эпох остаются только данные о вытянутости сгустков. CR может схлопнуть несколько складок находящихся рядом, а при слишком большой , вы рискуете просто испортить полученную на основном шаге структуру, как на картинке ниже:
Впрочем, последнюю проблему можно избежать, если взять вместо экспоненты какую-нибудь функцию, которая после некоторого максимального значения обращается в 0.
Авторы статьи советуют использовать вместо отдельного параметра скорости обучения ту же , но это откровенно говоря не работает: если большой (порядка единицы), алгоритм идёт вразнос, если маленький (0.01), то ничего вообще не обновляется. Странно, быть может, у них были какие-то хорошие данные или подогнанный вектор важности переменных?
Пока что я не сказал ни слова именно о кластеризации данных при помощи SOM. Построенная при помощи и сетка — забавная визуализация, но сама по себе она ничего не говорит о количестве кластеров. Более того, я бы даже сказал, что красивые разноцветные сетки, которые можно нагуглить по запросу «SOM визуализация» — скорее приём для пресс-релизов и популярных статей, чем реально полезная вещь.
Самый простой способ определения количества сгустков данных на складке — вдумчивое вглядывание в так называемую U-матрицу. Это разновидность визуализации карт Кохонена, где вместе со значениями нейронов показывается расстояние между ними. Таким образом можно легко можно определить, где кластеры соприкасаются, а где проходит граница.
Более интересный способ — запустить поверх получившейся матрицы какой-нибудь другой алгоритм кластеризации. Подойдёт, например, DBSCAN, особенно вместе CR-модификацией SOM, описанной выше. Функцию расстояния второго алгоритма следует комбинировать из расстояния по сетке в слое () и реального расстояния между нейронами (), чтобы не потерять топологическую информацию о складке.
Но более продвинутым кажется накапливание релевантной информации о кластерах прямо во время работы основного алгоритма. Эрен Голге и Пинар Дайгулу предлагают[6] каждую эпоху работы основного алгоритма запоминать, сколько раз активировался нейрон (т.е. нейрон оказывался победителем или его вес обновлялся, т.к. победителем оказывался близкий по слою нейрон), и на основании этого судить, олицетворяет ли нейрон кластер или повис в пустом пространстве.
Алгоритм 3, Rectifying SOM (А1 с изменениями):
Вход: , , , , ,
Чем чаще нейрон оказывается победителем, тем больше вероятность, что он где-то в толще кластера, а не вне её. Обратите внимание, что полный счёт нейронов накапливается с множителем : чем меньше скорость обучения, тем больший вес будет иметь WC. Так сделано, чтобы последние эпохи цикла вносили больший вклад, чем первые. Это можно сделать и другими способами, так что несильно привязывайтесь к именно этой конкретной форме.
ES — безразмерная величина, её абсолютные значения не несут особого смысла. Просто чем больше значение, тем больше шансов, что нейрон прицепился к чему-то значимому. После окончания А3 следует как-либо нормализовать получившийся вектор. После наложения ES на нейроны получится примерно такая картина:
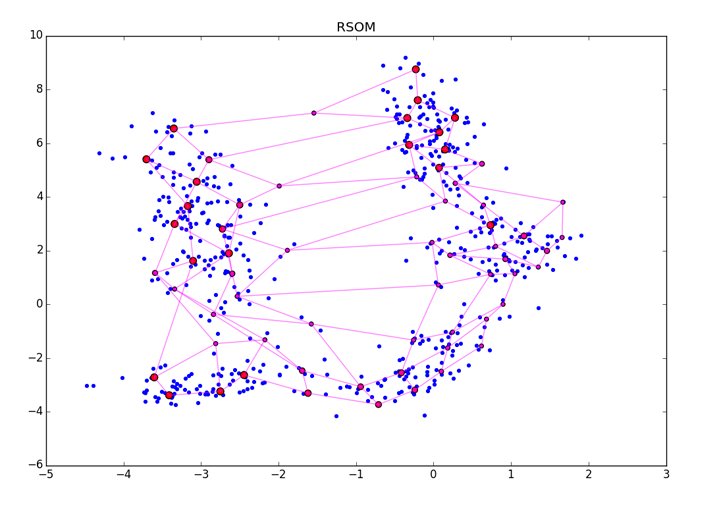
Крупные красные точки представляют нейроны с высоким счётом возбуждения, маленькие красно-фиолетовые — с малым. Обратите внимание, что RSOM чувствителен ко способу финальной обработки ES и к кластерам разной плотности в данных (см. нижний правый угол картинки). Убедитесь, что вы задали больше эпох чем нужно для сходимости алгоритма, чтобы ES точно успел накопить правильные значения.
Лучше всего, разумеется, применять и RSOM, и дополнительный кластеризатор поверх и просмотр визуализации глазами.
В обзор не вошли
Казалось бы, SOM выигрывает по вычислительной сложности, однако не стоит радоваться раньше времени, не увидев под О-большим. зависит от желаемого разрешения самоорганизующейся карты, которое зависит от разброса и неоднородности данных, которое, в свою очередь, неявно зависит от и . Так что в реальной жизни сложность — что-то вроде .
В приведённой таблице видны сильные и слабые стороны SOM и t-SNE. Легко можно понять, почему самоорганизующиеся карты уступили место другим методам кластеризации: хоть визуализация картами Кохонена более осмыслена, позволяет наращивание новых нейронов и задание желаемой топологии на нейронах, деградация алгоритма при большом сильно подкашивает востребованность SOM в современной науке о данных. Кроме того, если визуализацию при помощи t-SNE можно сразу использовать, самоорганизующимся картам нужна постобработка и/или дополнительные усилия по визуализации. Дополнительный негативный фактор — проблемы с инициализацией и перекрутами.
Значит ли это, что самоорганизующиеся карты остались в прошлом data science? Не совсем. Нет-нет, да и приходится иногда обрабатывать не очень многомерные данные — для этого вполне можно воспользоваться SOM. Визуализации получаются действительно довольно красивые и эффектные. Если не лениться применять доработки алгоритма, SOM отлично находит кластеры на гиперскладках.
Спасибо за внимание. Надеюсь, моя статья вдохновить кого-нибудь на создание новых SOM-визуализаций. С гитхаба можно скачать код с минимальным примером SOM с основными оптимизациями, предложенными в статье и посмотреть на анимированное обучение карты. В следующий раз я постараюсь рассмотреть алгоритм «нейронный газ», который также основан на конкурентном обучении.
[1]: Self-Organizing Maps, book; Teuvo Kohonen
[2]: Energy functions for self-organizing maps; Tom Heskesa, Theoretical Foundation SNN, University of Nijmegen
[3]: bair.berkeley.edu/blog/2017/08/31/saddle-efficiency
[4]: Winner-Relaxing Self-Organizing Maps, Jens Christian Claussen
[5]: Data-Driven Cluster Reinforcement and Visualization in Sparsely-Matched Self-Organizing Maps; Narine Manukyan, Margaret J. Eppstein, and Donna M. Rizzo
[6]: Rectifying Self Organizing Maps for Automatic Concept Learning fromWeb Images; Eren Golge & Pinar Duygulu
[7]: An Alternative Approach for Binary and Categorical Self-Organizing Maps; Alessandra Santana, Alessandra Morais, Marcos G. Quiles
[8]: Temporally Asymmetric Learning Supports Sequence Processing in Multi-Winner Self-Organizing Maps
[9]: Magnification Control in Self-Organizing Maps and Neural Gas; Thomas Villmann, Jens Christian Claussen
[10]: Embedded Information Enhancement for Neuron Selection in Self-Organizing Maps; Ryotaro Kamimural, Taeko Kamimura
[11]: Initialization Issues in Self-organizing Maps; Iren Valova, George Georgiev, Natacha Gueorguieva, Jacob Olsona
[12]: Self-organizing Map Initialization; Mohammed Attik, Laurent Bougrain, Frederic Alexandre
Часть вторая — DBSCAN
Часть третья — кластеризация временных рядов
Часть четвёртая — SOM
Self-organizing maps (SOM, самоорганизующиеся карты Кохонена) — знакомая многим классическая конструкция. Их часто поминают на курсах машинного обучения под соусом «а ещё нейронные сети умеют вот так». SOM успели пережить взлёт в 1990-2000 годах: тогда им пророчили большое будущее и создавали новые и новые модификации. Однако, в XXI веке SOM понемногу уходят на задний план. Хоть новые разработки в сфере самоорганизующихся карт всё ещё ведутся (большей частью в Финляндии, родине Кохонена), даже на родном поле визуализации и кластеризации данных карты Кохонена всё чаще уступает t-SNE.
Давайте попробуем разобраться в тонкостях SOM'ов, и выяснить, заслуженно ли они были забыты.
Основные идеи алгоритма
Вкратце напомню стандартный алгоритм обучения SOM[1]. Здесь и далее () — матрица со входными данными, где — количество элементов в наборе данных, а — размерность данных. — матрица весов (), где — количество нейронов в карте. — скорость обучения, — коэффициент кооперации (см. ниже), — количество эпох.
() — матрица расстояний между нейронами в слое. Обращу ваше внимание, что последняя матрица это не то же самое, что . Для нейронов есть два расстояния: расстояние в слое () и разница между значениями.
Также обратите внимание, что хоть нейроны часто для удобства рисуются так, будто бы они «нанизаны» на квадратную сетку, это совсем не означает, что и хранятся они как тензор . Сетку олицетворяет .
Введём сразу и — показатели затухания скорости обучения и затухания кооперации соответственно. Хоть строго говоря они и не обязательны, без них почти невозможно сойтись к достойному результату.
Алгоритм 1 (стандартный алгоритм обучения SOM):
Вход: , , , , ,
- Инициализировать
- раз:
- Перемешать список индексов случайным образом order: = shuffle()
- Для каждого из order:
- // Берём случайный вектор из X
- // Находим номер ближайшего к нему нейрона
- // Находим коэффициент близости нейронов по сетке. Pаметьте, что всегда 1
- :=
- :=
Каждую эпоху обучения мы перебираем элементы входного датасета. Для каждого элемента мы находим ближайший к этому нейрон, затем обновляем его веса и веса всех его соседей по слою в зависимости от расстояния до и от коэффициента кооперации . Чем больше , тем больше нейронов эффективно обновляют веса на каждом шаге. Картинка ниже — графическая интерпретация шагов А1.2.2.1-А1.2.2.4 для случая, когда большой (1) и когда малый (2) при одной и той же скорости обучения и ближайшем векторе.
В первом случае близки к единице, и к двигается не только ближайший вектор, но и его первый сосед и даже, чуть меньше, второй сосед. Во втором случае те же соседи двигаются совсем чуть-чуть. Заметьте, что в обоих случаях четвёртый вектор с таким же от ближайшего вектора, но с гораздо большим не двигается.
Несколько эпох обучения карты Кохонена для наглядности:
Если моего краткого напоминания алгоритма оказалось недостаточно, прочитайте эту статью, где шаги в А1 рассмотрены более подробно.
Таким образом, основные идеи SOM:
- Принудительное внедрение некоторого порядка между нейронами. мягко переносится на , в пространство данных.
- Стратегия Winner Takes All (WTA). На каждом шаге обучения мы определяем ближайший «победивший» нейрон и исходя из этого знания обновляем веса.
- Кооперация перерастает в эгоизм глобальная примерная подстройка перерастает в точную локальную. Пока большая, обновляется заметная часть и стратегия WTA не так видна, когда стремится к нулю, обновляются по одному.
Сразу напрашивается несколько тривиальных модификаций:
- Не обязательно использовать гауссиану для вычисления на шаге А1.2.2.3. Первый кандидат в альтернативные варианты — распределение Коши. Как известно, оно имеет более тяжёлые хвосты: больше нейронов будут изменяться на этапе кооперации.
- Затухания и не обязаны быть экспоненциальными. Кривая затухания в виде сигмоиды или ветви гауссианы может дать алгоритму больше времени для грубой подстройки.
- Не обязательно крутиться в цикле именно раз. Можно прекращать итерации, если значения W не будут меняться на протяжении нескольких эпох.
- Обучение напоминает обычный SGD. «Напоминает», потому что не существует какой-либо функции энергии, которую бы этот процесс оптимизировал[2]. Строгую математику нам портит шаг А1.2.2.1 — взятие ближайшего вектора. Существуют модификации SOM, где энергия таки есть, но мы и так вдаёмся в детали. Смысл в том, что это не мешает использовать на шаге А1.2.2.4 вместо обычных обновлений весов, скажем, импульс Нестерова (Nesterov momentum).
- Добавление небольших случайных пертурбаций в градиент хоть и приносит меньшую пользу, чем в случае обычных многослойных нейронных сетей, всё равно выглядит полезным приёмом для избегания седловых точек[3].
- Self-organizing maps поддерживают обучение подвыборками (batches)[1]. Их применение позволяет проводить обучение быстрее и глаже проскакивать плохие конфигурации
- Не забывайте про нормализацию входных значений и использование вектора весов входных переменных, если известно, что какие-то фичи важнее других.
Топология нейронов
Чуть менее очевидная модификация самоорганизующихся карт, в которой состоит их сила и уникальность, но про которую постоянно забывают, кроется в этапе инициализации и . Слой Кохонена в примерах постоянно изображают как сетку, но это ни в коей мере не обязательно. Наоборот, всячески советуется подстраивать взаимное расположение нейронов () в слое под данные.
Как минимум, вместо обычной сетки лучше использовать гексагональную: квадратная сетка искажает результаты в пользу прямых линий, да и менее приятна на вид чем шестиугольная. Если предполагается, что данные циклические, стоит инициализировать , будто нейроны находятся на ленте или даже на торе (см. рис. ниже, номер 1). Если вы пытаетесь вместить в SOM трёхмерные данные, которые заведомо не ложатся на гиперскладку, следует воспользоваться структурой «ворсистый ковёр» (2). Если известно, что какие-то кластеры могут далеко отстоять от других, попробуйте «лепестковую» структуру слоя (3). Совсем хорошо, если известно, что данные имеют некоторую иерархию: тогда можно в качестве можно взять матрицу расстояний графа этой иерархии (4).
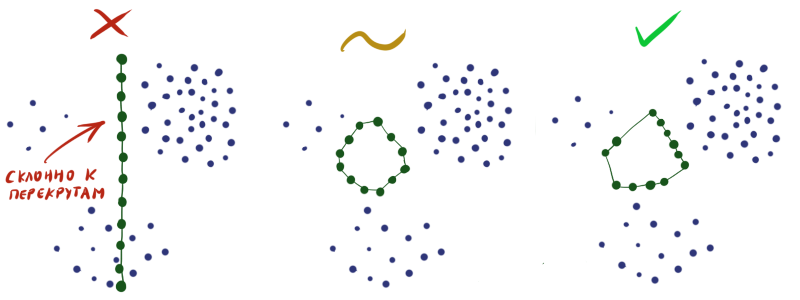
В общем, ограничивается вашей фантазией, знанием о данных и удобством последующей визуализации нейронов. Из-за последнего фактора не стоит делать, например, кубический слой Кохонена. Утверждение собственного порядка между нейронами — мощный инструмент, но следует помнить, что чем сложнее структура , тем сложнее инициализировать начальные веса в и тем больше вероятность получить на выходе так называемый перекрут (kink) в слое Кохонена. Перекрут — дефект обучения, когда глобально соответствует и данным, за исключением некоторых особых точек, в которых слой перекручивается, неестественно растягивается или делится между двумя кластерами. При этом выбраться из этого состояния алгоритм обучения SOM не может, не разрушив уже устоявшейся структуры. Несложно увидеть, что перекрут — аналог глубокого локального минимума в обучении обычных нейронных сетей.
Абстрактный пример классического перекрута:
Пример перекрута на синтетических данных при попытке вписать длинную кривую в кластеры. Верхний левый и правый лепестки выглядят правдоподобно, но выделенное место портит порядок.
Инициализируя веса в слое случайным образом, вы практически гарантируете себе плохой результат на выходе. Необходимо сконструировать таким образом, чтобы в каждой конкретной области плотность нейронов приблизительно соответствовала плотности данных. Увы, без экстрасенсорных способностей или дополнительной информации о датасете сделать это довольно сложно.
Поэтому часто приходится делать так, чтобы нейроны просто равномерно рассеялись по всему пространству данных без пересечений (как на рисунке посередине), и мириться с тем, что не во всех областях плотность нейронов будет отвечать плотности данных.
Winner relaxation/winner enhancing
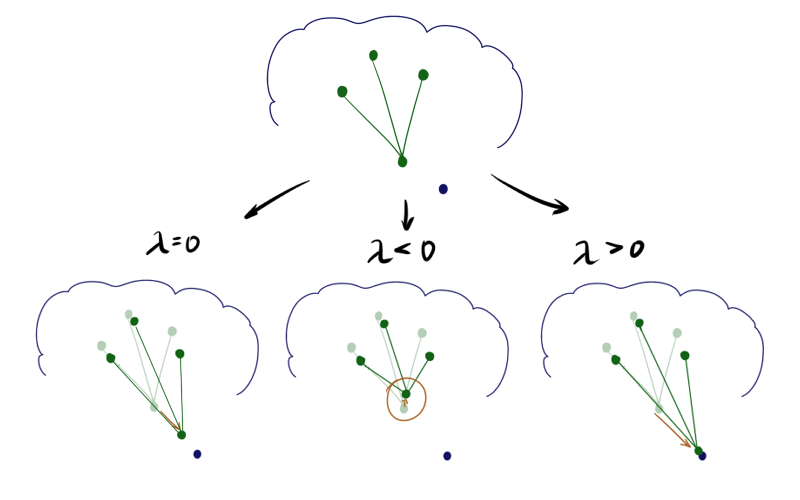
Эта идея была изначально предложена Кохоненом[1], а затем обобщена его последователями[4]. Что если отнимать или прибавлять к обновлению нейрона-победителя обновления его соседей? Математически это выглядит так: шаг А1.2.2.4 для нейрона победителя заменяется на
Где — параметр расслабления. Обновления остальных нейронов остаются без изменений либо к ним добавляется часть расслабляющего слагаемого. Звучит странно; получается, что если и у нейрона много соседей, то он может даже откатываться назад от ? Если не применять ограничение сверху на длину вектора, так и есть:
При отрицательном нейрон как бы подтягивает к себе своих соседей, а при положительном, наоборот, стремится выпрыгнуть из их окружения. Разница особенно заметна в начале обучения. Вот пример состояния SOM после первой эпохи для одинаковой начальной конфигурации и отрицательном, нулевом и положительном соответственно:
Из-за описанных выше эффектов нейроны разлетаются более широким веером, при — вытягиваются. Соответственно, в первом случае покрытие будет более равномерным, а во втором — больший эффект будут иметь малые обособленные кластеры и выбросы. В последнем случае в верхней части графика также видно возможный перекрут. В литературе советуется , но я обнаружил, что хорошие результаты можно получить и при гораздо больших по модулю значениях. Обратите внимание, что в добавленное слагаемое входит , которое, в свою очередь, зависит от . Следовательно, вышеописанный приём будет играть большую роль в начале обучения — на этапе сотрудничества.
Cluster refinement phase
Часто случается так, что после основного цикла алгоритма оказывается, что хоть нейроны SOM и прицепились к чему-то, их плотность на кластерах вполне сравнима с плотностью в местах, где кластеров нет. Проводить анализ в таких условиях довольно сложно. Нарни Манукьян и команда предлагают[5] довольно простое решение: вслед за основным алгоритмом запускать ещё один цикл подгонки нейронов.
Алгоритм 2, Cluster refinement phase (фаза подстройки кластеров):
Вход: , , , , ,
- раз:
- Перемешать список индексов случайным образом order: = shuffle()
- Для каждого из order:
- // Берём случайный вектор из X
- // Находим коэффициент близости нейронов к выбранному элементу данных
- :=
- :=
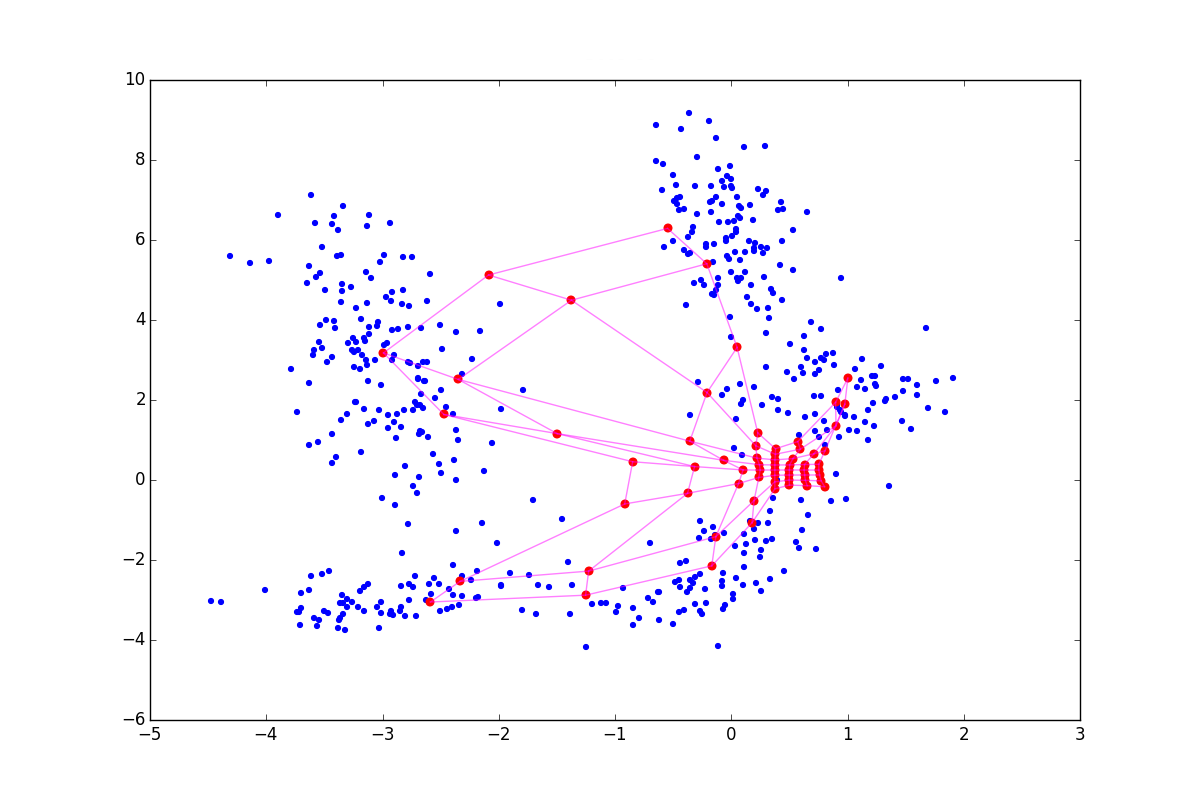
Хоть алгоритм выглядит и очень похоже на А1, обратите внимание, что теперь мы не ищем ближайший нейрон, а просто пододвигаем все нейроны к . Из-за взаимодействия в экспоненте в A2.2.2.2 и на этапе обновления весов изменяются по сути только нейроны, находящиеся в определённом кольце от . Для наглядности посмотрим на пять эпох подстройки:
Аккуратнее: чем сильнее подстройка в CR-фазе, тем лучше видны кластеры, но тем больше теряется локальная информация о форме кластера. После нескольких эпох остаются только данные о вытянутости сгустков. CR может схлопнуть несколько складок находящихся рядом, а при слишком большой , вы рискуете просто испортить полученную на основном шаге структуру, как на картинке ниже:
Впрочем, последнюю проблему можно избежать, если взять вместо экспоненты какую-нибудь функцию, которая после некоторого максимального значения обращается в 0.
Авторы статьи советуют использовать вместо отдельного параметра скорости обучения ту же , но это откровенно говоря не работает: если большой (порядка единицы), алгоритм идёт вразнос, если маленький (0.01), то ничего вообще не обновляется. Странно, быть может, у них были какие-то хорошие данные или подогнанный вектор важности переменных?
Визуализация, Rectifying SOM
Пока что я не сказал ни слова именно о кластеризации данных при помощи SOM. Построенная при помощи и сетка — забавная визуализация, но сама по себе она ничего не говорит о количестве кластеров. Более того, я бы даже сказал, что красивые разноцветные сетки, которые можно нагуглить по запросу «SOM визуализация» — скорее приём для пресс-релизов и популярных статей, чем реально полезная вещь.
Самый простой способ определения количества сгустков данных на складке — вдумчивое вглядывание в так называемую U-матрицу. Это разновидность визуализации карт Кохонена, где вместе со значениями нейронов показывается расстояние между ними. Таким образом можно легко можно определить, где кластеры соприкасаются, а где проходит граница.
Более интересный способ — запустить поверх получившейся матрицы какой-нибудь другой алгоритм кластеризации. Подойдёт, например, DBSCAN, особенно вместе CR-модификацией SOM, описанной выше. Функцию расстояния второго алгоритма следует комбинировать из расстояния по сетке в слое () и реального расстояния между нейронами (), чтобы не потерять топологическую информацию о складке.
Но более продвинутым кажется накапливание релевантной информации о кластерах прямо во время работы основного алгоритма. Эрен Голге и Пинар Дайгулу предлагают[6] каждую эпоху работы основного алгоритма запоминать, сколько раз активировался нейрон (т.е. нейрон оказывался победителем или его вес обновлялся, т.к. победителем оказывался близкий по слою нейрон), и на основании этого судить, олицетворяет ли нейрон кластер или повис в пустом пространстве.
Алгоритм 3, Rectifying SOM (А1 с изменениями):
Вход: , , , , ,
- Инициализировать
- Инициализировать // Excitement score — полный счёт возбуждения нейрона
- раз:
- Инициализировать // Win count — счёт возбуждения нейрона в текущую эпоху
- Перемешать список индексов случайным образом order: = shuffle()
- Для каждого из order:
- // Берём случайный вектор из X
- // Находим номер ближайшего к нему нейрона
- // Находим коэффициент близости нейронов по сетке. Pаметьте, что всегда 1
- // Обновляем текущий счёт активации
- :=
- :=
- // Накапливаем общий счёт
Чем чаще нейрон оказывается победителем, тем больше вероятность, что он где-то в толще кластера, а не вне её. Обратите внимание, что полный счёт нейронов накапливается с множителем : чем меньше скорость обучения, тем больший вес будет иметь WC. Так сделано, чтобы последние эпохи цикла вносили больший вклад, чем первые. Это можно сделать и другими способами, так что несильно привязывайтесь к именно этой конкретной форме.
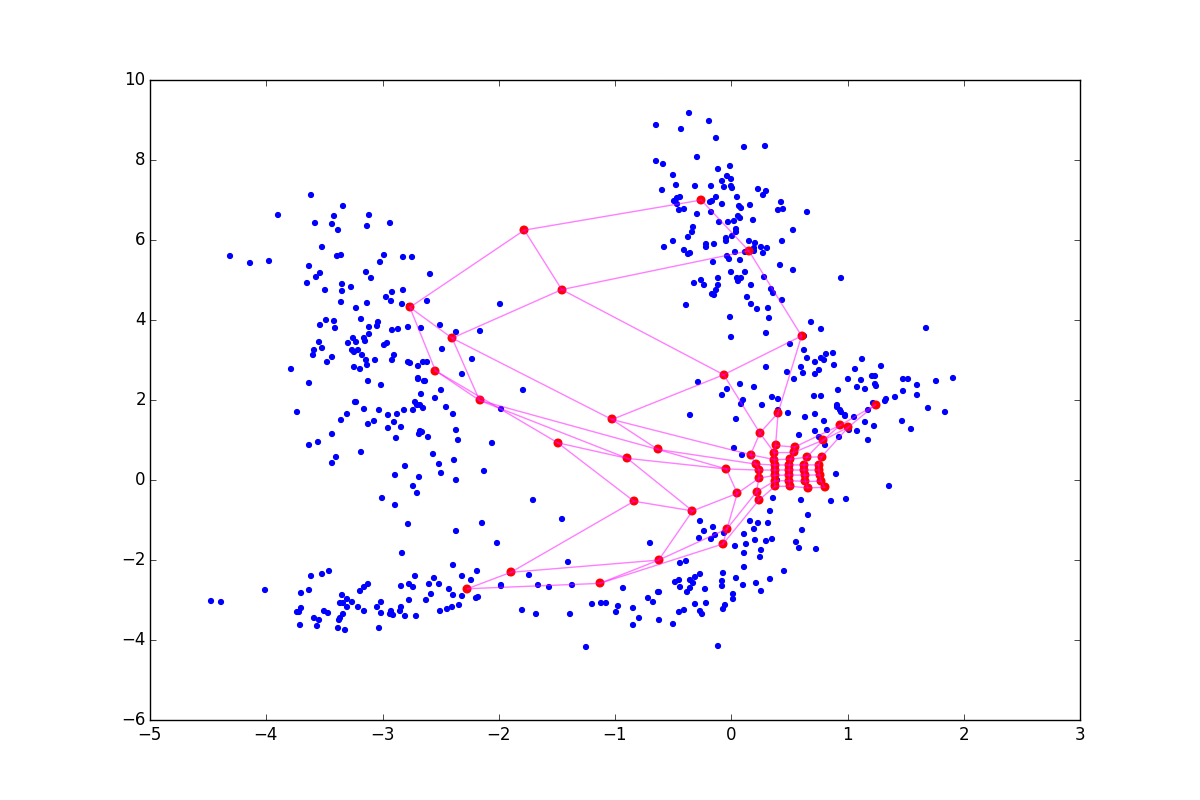
ES — безразмерная величина, её абсолютные значения не несут особого смысла. Просто чем больше значение, тем больше шансов, что нейрон прицепился к чему-то значимому. После окончания А3 следует как-либо нормализовать получившийся вектор. После наложения ES на нейроны получится примерно такая картина:
Крупные красные точки представляют нейроны с высоким счётом возбуждения, маленькие красно-фиолетовые — с малым. Обратите внимание, что RSOM чувствителен ко способу финальной обработки ES и к кластерам разной плотности в данных (см. нижний правый угол картинки). Убедитесь, что вы задали больше эпох чем нужно для сходимости алгоритма, чтобы ES точно успел накопить правильные значения.
Лучше всего, разумеется, применять и RSOM, и дополнительный кластеризатор поверх и просмотр визуализации глазами.
Прочее
В обзор не вошли
- Модификации SOM для работы с категориальными данными[7], последовательностями, картинками и прочими, неродными для SOM, видами данных[1].
- Работы связанные со временной асимметричностью функций близости нейронов по сетке.
Автор утверждает, что это позволяет бороться с перекрутами[8]. - Исследования, связанные с контролем над степенью покрытости данных нейронами (борьба с искажениями на краях датасета)[9].
- Накопление информации о важности определённых входов[10].
- Кодирование данных при помощи SOM[1].
- Хитрые способы инициализации [11][12].
- Возможность добавить дополнительное слагаемое упругости. Упругость служит аналогом регуляризации в обычных нейронных сетях, запрещая слишком запутанные конфигурации.
- Обнаружение выбросов. Довольно простая идея: после некоторой эпохи, когда карта уже более-менее сошлась, можно начать проверять, не слишком ли большое расстояние от до ближайшего нейрона. Если в течение нескольких эпох расстояние больше заданного параметра и не меняется, можно пометить образец данных как выброс (и как вариант, даже исключить из этапа обновления). Минус: обнаруживает выбросы только «снаружи» датасета, но не в его толще.
- Многие другие интересные, но слишком специальные вещи.
Сравнение SOM и t-SNE
| SOM | t-SNE | |
|---|---|---|
| Сложность | Barnes-Hut t-SNE — , но другие реализации могут быть более вычислительноёмкими | |
| Количество гиперпараметров | 3-5, возможно намного больше + матрица расстояний на нейронах. Обязательны количество эпох, learning rate и начальный коэффициент сотрудничества. Также часто указываются затухание скорости обучения и коэффициент сотрудничества, но с ними почти никогда не возникает проблем. | 3-4, возможно больше + метрика на данных. Обязательны количество эпох, learning rate и perplexity, часто встречается early exaggeration. Perplexity довольно магический, однозначно придётся с ним повозиться. |
| Разрешение результирующей визуализации | Элементов не больше, чем нейронов () | Элементов не больше, чем элементов в наборе данных () |
| Топология визуализации | Любая, нужно лишь предоставить матрицу расстояний между нейронами | Только обычная плоскость или трёхмерное пространство |
| Дообучение, расширение структуры | Есть, довольно тривиально реализовать | Нет |
| Поддержка дополнительных слоёв преобразований | Есть, можно поставить перед слоем Кохонена сколько угодно плотносоединённых или свёрточных слоёв и обучить обычным backprop'ом | Нет, только ручное преобразование данных и feature-engeneering |
| Предпочитаемые типы кластеров | По умолчанию отлично отображает кластеры в виде двумерных складок и экзотические кластеры. Нужны ухищрения, чтобы хорошо визуализировать структуры с размерностью больше двух. | Замечательно отображает гипершары. Гиперскладки и экзотические чуть хуже, сильно зависит от функции расстояния. |
| Предпочитаемая размерность пространства данных | Зависит от данных, но чем больше, тем хуже. Алгоритм может деградировать даже при , так как у гиперскладки, образованной нейронами появляется слишком много степеней свободы. | Любая, пока не начнёт сказываться проклятие размерности |
| Проблемы с начальными данными | Нужно инициализировать веса нейронов. Это может быть технически сложно в случае нестандартной матрицы расстояний между нейронами (особенно топологии типа «граф») | Нет |
| Проблемы с выбросами | Есть, особенно если они распределены неравномерно | Нет, на визуализации они тоже будут выбросами |
| Эффекты на краях распределения данных | Часть данных остаётся недопокрытой SOM | Почти незаметны |
| Проблемы с ложноположительными кластерами | Нет | Ещё какие |
| Размер кластеров в визуализации | Несёт смысловую нагрузку | Почти всегда ничего не значит |
| Расстояние между кластерами в визуализации | Несёт смысловую нагрузку | Часто ничего не значит |
| Плотность кластеров в визуализации | Обычно имеет смысловую нагрузку, но может вводить в заблуждение в случае плохой инициализации | Часто ничего не значит |
| Форма кластеров в визуализации | Несёт смысловую нагрузку | Может обманывать |
| Как сложно оценить качество кластеризации | Очень сложно :( | Очень сложно :( |
Казалось бы, SOM выигрывает по вычислительной сложности, однако не стоит радоваться раньше времени, не увидев под О-большим. зависит от желаемого разрешения самоорганизующейся карты, которое зависит от разброса и неоднородности данных, которое, в свою очередь, неявно зависит от и . Так что в реальной жизни сложность — что-то вроде .
В приведённой таблице видны сильные и слабые стороны SOM и t-SNE. Легко можно понять, почему самоорганизующиеся карты уступили место другим методам кластеризации: хоть визуализация картами Кохонена более осмыслена, позволяет наращивание новых нейронов и задание желаемой топологии на нейронах, деградация алгоритма при большом сильно подкашивает востребованность SOM в современной науке о данных. Кроме того, если визуализацию при помощи t-SNE можно сразу использовать, самоорганизующимся картам нужна постобработка и/или дополнительные усилия по визуализации. Дополнительный негативный фактор — проблемы с инициализацией и перекрутами.
Значит ли это, что самоорганизующиеся карты остались в прошлом data science? Не совсем. Нет-нет, да и приходится иногда обрабатывать не очень многомерные данные — для этого вполне можно воспользоваться SOM. Визуализации получаются действительно довольно красивые и эффектные. Если не лениться применять доработки алгоритма, SOM отлично находит кластеры на гиперскладках.
Спасибо за внимание. Надеюсь, моя статья вдохновить кого-нибудь на создание новых SOM-визуализаций. С гитхаба можно скачать код с минимальным примером SOM с основными оптимизациями, предложенными в статье и посмотреть на анимированное обучение карты. В следующий раз я постараюсь рассмотреть алгоритм «нейронный газ», который также основан на конкурентном обучении.
[1]: Self-Organizing Maps, book; Teuvo Kohonen
[2]: Energy functions for self-organizing maps; Tom Heskesa, Theoretical Foundation SNN, University of Nijmegen
[3]: bair.berkeley.edu/blog/2017/08/31/saddle-efficiency
[4]: Winner-Relaxing Self-Organizing Maps, Jens Christian Claussen
[5]: Data-Driven Cluster Reinforcement and Visualization in Sparsely-Matched Self-Organizing Maps; Narine Manukyan, Margaret J. Eppstein, and Donna M. Rizzo
[6]: Rectifying Self Organizing Maps for Automatic Concept Learning fromWeb Images; Eren Golge & Pinar Duygulu
[7]: An Alternative Approach for Binary and Categorical Self-Organizing Maps; Alessandra Santana, Alessandra Morais, Marcos G. Quiles
[8]: Temporally Asymmetric Learning Supports Sequence Processing in Multi-Winner Self-Organizing Maps
[9]: Magnification Control in Self-Organizing Maps and Neural Gas; Thomas Villmann, Jens Christian Claussen
[10]: Embedded Information Enhancement for Neuron Selection in Self-Organizing Maps; Ryotaro Kamimural, Taeko Kamimura
[11]: Initialization Issues in Self-organizing Maps; Iren Valova, George Georgiev, Natacha Gueorguieva, Jacob Olsona
[12]: Self-organizing Map Initialization; Mohammed Attik, Laurent Bougrain, Frederic Alexandre
dom1n1k
Очень ценный цикл статей, надеюсь у автора хватит запалу его продолжать, несмотря на скромные оценки.