
Беглый поиск по Хабру по темам «морские платформы и судостроение» даёт, в основном, всякие заМАСКированные морские старты и утопление дата-центров. Предлагаю эту тему немного разбавить.

Наша компания (это судоремонтно-судостроительный завод) в 2014 году выиграла тендер на строительство опорного блока морской буровой платформы для одной нефтедобывающей компании. Эта компания работает на двух месторождениях на Каспии (ссылка 1, ссылка 2)
Каспийское море в месте установки буровых платформ довольно мелкое. Поэтому платформы устанавливаются прямо на морское дно и фиксируются сваями. Опорный блок — это фундамент платформы. После изготовления на заводе он буксируется на место, потом в его балластные отсеки заливают воду и он опускается на дно. Следующим этапом на него ставят готовую платформу.
Блок изготавливают секциями.

Примерно такими.
Секции собираются в цехах, после чего подают на сборочный стапель, где они стыкуются. Получается вот это:

Наш опорный блок строился в 60 метрах от берега. Для спуска на воду необходимо было решить несколько проблем. Проблема №1: конструкцию весом 5600 тонн и длинной около 100 м необходимо придвинуть к берегу. Проблема №2. Необходимо построить судно, рассчитанное на то, что на него надвинут эти 5600 тонн. Это судно должно уметь слегка подныривать (т. е. работать, как плавучий док).
Для решения проблемы №2 мы купили два сухогруза типа «Амур»:

К нам на завод они пришли своим ходом. Все лишнее с них было снято. И в итоге получился вот такой катамаран.

Он не самоходный. В каждом корпусе имеется 6 балластных отсеков. На носовой башне расположен Центральный Пост Управления (ЦПУ). В нижней части носа каждого корпуса расположено машинное отделение. В каждом стоит два дизель-насоса и дисковые затворы с пневматическим управлением, принудительным пружинным закрытием и дополнительным ручным управлением.

Вот такие. Диаметр — 250мм.
Пневматика была выбрана из-за простоты запасания энергии для работы в аварийном режиме, простота переключения в ручной режим. Конечно, можно было поставить задвижки или затворы с электроприводом. Но в этом случае на судне должна быть штатная основная электростанция, и аварийный источник электроэнергии. В данном случае, все критически важное оборудование питается от аккумуляторных батарей. Все остальное питается от берега. При необходимости, мы устанавливаем на башне пару генераторов (основной и резервный). Подключение и переключение генераторов в процессе работы саму работу не прерывает.
Перед установкой на судно мы проверяли эти затворы в цеху. При срабатывании пневмоклапана затвор с легким звуком «пшшшш» плавно открылся в течение 1,5 секунды. При выключении так же плавно и тихо закрылся. Наши слесаря — мужики, закручивающие и откручивающие гайки до 19 включительно голыми руками — испытали эстетический экстаз и дружно попросили ещё…
6 затворов управляют подачей воды в балластные отсеки. Остальные задают режим работы насосов — заполнение или откачка. Всем этим командует Станция Управления.

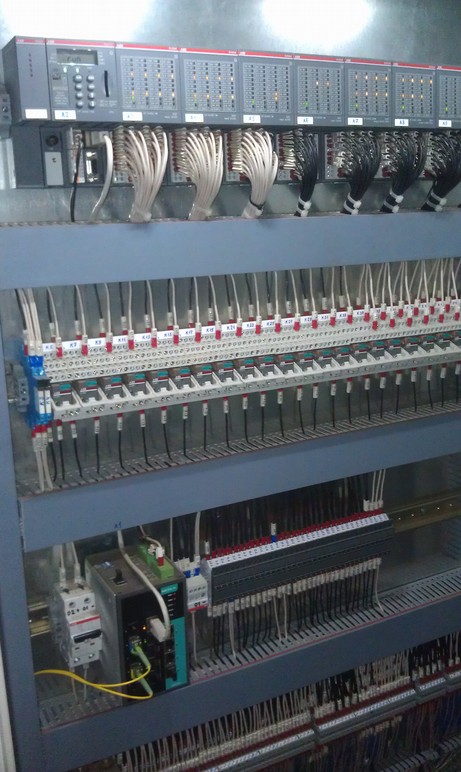
Это её потроха.
Две Станции Управления и пульт в ЦПУ объединены в сеть с топологией «Кольцо» по оптике.

А это наш пульт.
Он принципиально сделан без физических кнопок (ну, типа «стеклянная кабина»). Мышь справа — для управления видеорегистратором.
При включении пульта на основных (больших) панелях включается такое приглашение:
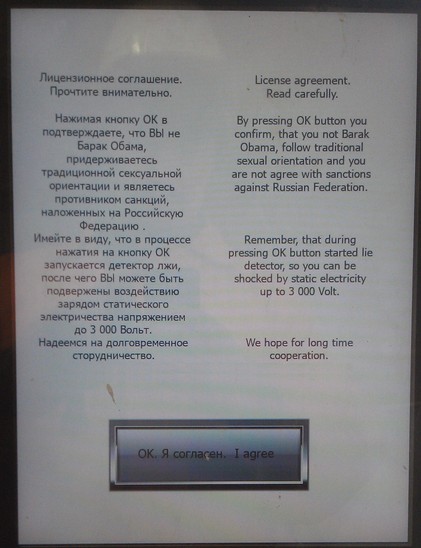
Какое время, такие и шутки. Эту заставку неоднократно показывали иностранцам. Смеются, но нажимать боятся.

На этом экране отображается уровень и объём воды в каждом балластном отсеке а так же осадка в 6 точках.
В качестве датчиков уровня мы использовали погружные датчики гидростатического давления известного российского «зодиакального» производителя.

Управление оборудованием каждого корпуса осуществляется с этого экрана. Вообще, каждая панель может управлять любым корпусом.

А это малая панель — кренодифферентометр. Показывает наклон судна по отношению к поверхности воды. Источником информации для него были забортные датчики уровня. Далее, зная геометрические размеры, рассчитывался угол крена и дифферента.
Мы строили — строили и наконец построили! Пришла пора испытаний и предъявления разным надзорным органам.
Мы набрали немного воды в балластные отсеки (около метра) и… начались гидродинамические удары! Они возникали при переключении режима работы насосов, при открытии и закрытии балластных затворов. Акустическое воздействие на наши перепонки от этих ударов было очень чувствительным.
В моём присутствии таким ударом вырвало из насоса чугунный смотровой лючок толщиной около 7 мм. Из него начала бить мощная струя воды. Я, представляя себя героем-подводником и стараясь впучить глаза обратно, начал судорожно закручивать забортные задвижки — кингстоны. Они у нас на ручном управлении.
Проблему ударов мы решили. Это был комплекс мер. Одна из них — это замедление цикла открытия-закрытия. Но до сих пор, если кто-то сильно хлопает металлической дверью, что-то в животе пытается упасть ниже плинтуса.
Пришло время пробного погружения ниже стапель-палубы. Как только вода её залила, начала сказываться большая свободная поверхность воды в балластных отсеках. Это привело к раскачке. В тот момент это было не страшно, но очень неприятно. К чему это может привести: ссылка. Это другой завод и такой же блок, как и у нас. К счастью, в тот раз у них никто не пострадал. Эту проблему мы решили путем установки дополнительных поплавков и методикой заполнения отсеков.
И вот пришло время ехать!
Для этого блок опустили на дорожки — склизы. Каждая половинка стояла на двух дорожках. На каждой дорожке поставили два гидроцилиндра. Склизы густо смазывались.

Но для того чтобы поехать необходимо было решить проблему синхронизации гидроцилиндров. Расстояние между цилиндрами около 100м. Расстояние от гидростанции до цилиндров разное. Вес блоков разный. Сила трения тоже может меняться в силу разных причин. Если тупо включить и ехать без контроля, то мы гарантировано получим перекос и смещение. Так же нужно помнить, что задний ход не включишь.
Эту проблему мы решили путем установки над каждой из четырех дорожек видеокамер и линеек. Оператор надвижки должен был путем включения и выключения групп цилиндров поддерживать одинаковые значения на линейках всех дорожек. Скорость движения была достаточно комфортной: 1,3 метра (один шаг) проезжали примерно за 15 минут. После этого переставляли упоры, выставляли линейки и ехали дальше.

Наконец, мы доехали к краю берега. К этому времени катамаран был прочно пришвартован, а его склизовые дорожки были соединенны с дорожками на берегу подвижными звеньями.
Лирическое отступление. Представьте, что вы хотите прокатиться на таком катамаранчике:

Стоит он ровно и красиво. Вы наступаете на него — и он кренится. Вы пересаживаетесь на середину — и крен уходит. Но осадка увеличилась. Вы сдвигаетесь на другой край — и он кренится уже туда.
Эти же процессы должны происходить и у нас. Только масштаб другой и последствия. Наша задача была — не допустить этого. Для этого мы должны были иметь определенную осадку с запасом воды в балластных отсеках. На каждом шаге мы должны были откачивать воду из одного корпуса и наливать в другой. На определенном шаге наоборот — заливать в первый и откачивать из второго. При этом следя за креном, дифферентом, положением по отношению к берегу и согласовывая все действия с береговой командой, которая едет к нам в гости.
Наши ребята выполнили расчеты количества воды в отсеках для каждого шага. Этими расчетами мы и пользовались при надвижке.

Весь процесс продолжался непрерывно в течение 18 часов и благополучно закончился поздней ночью.
Балластные отсеки катамарана полностью откачали. Его самого отвели на другое место. Там он стоял еще год. Все это время на блоке продолжались работы. Через год мы спустили его на воду. Но это уже следующая история.
После перехода катамарана на новое место мы столкнулись с необъясненным (надеюсь пока) явлением. Как я уже говорил выше, угол крена и дифферента рассчитывался на основе показаний датчиков забортного уровня. Эта система идеально отработала при надвижке, так же как и остальные датчики уровня. Но после перехода на новое место (300 м ниже по течению) все три забортных датчика корпуса, стоящего дальше от берега («стрежневой корпус») начали показывать осадку больше на примерно на 20см! Соответственно, наш электронный прибор начал показывать крен! Но аварийный прибор (простой строительный отвес) этого не подтвердил! Датчики и вся электроника была перепроверена. Ничего не нашли. Возникло предположение, что это происки темной энергии — гидродинамической. Датчики стоят в плоской части судна в носу, середине и корме. У них есть отдельные клапаны, приваренные прямо к днищу. В новом месте более пологий профиль дна реки, а этот корпус (днище которого по большей части плоское) сильнее выступает в стрежень. И, по моему, скорость течения реки в районе этого корпуса выше. Может в этом дело? У меня есть робкое предположение, которое пока не было опровергнуто, но я не хотел бы пока его озвучивать. Может кто-то из хабровчан сможет объяснить это явление?
Комментарии (20)

arheops
13.09.2018 20:21Датчики меряют давление, давление в струе воды может быть меньше, чем в стоячей воде по причине закона Бернули.
А вообще надо документацию на датчики смотреть.dima32768 Автор
14.09.2018 07:36Я тоже склоняюсь к мысли о законе Бернулли.
Датчики самые обычные погружные. Шкала — 25м, выход 4-20мА. К днищу приварен клапан, в который вкручена резьбовая часть датчика. Меряется статическая составляющая полного давления.
super-guest
14.09.2018 02:49-1Датчики и вся электроника была перепроверена. Ничего не нашли. Возникло предположение, что это происки темной энергии
"Абама, Абама во всём виноват!" (с)
Какое время, такие и шутки.
А если серьёзно, то складывается впечатление, что тесно работая с теми, кто «руководит» богатствами страны, вы, кажется, попали в некоторую замкнутую или вялотекущую среду (в информационном и/или культурном смысле) и отстали от жизни, оказавшись в мире "удельных князьков". Остаётся только грустно вздохнуть (как минимум из-за тамошнего уровня)…
wtigga
14.09.2018 05:33Статья отличная, с интересом прочитал. Но «шутка» сильно портит впечатление об остальном тексте.
qwer123456
14.09.2018 07:38Датчики уровня с какой периодичностью продуваются? Если вас важен только крен раскидали бы по бортам 2 vru и ориентировались бы по ним
dima32768 Автор
14.09.2018 07:40Датчики не продуваются в силу их конструктивной особенности. Как я понимаю vru- это инклинометры. В последствии мы на них и перешли.
qwer123456
14.09.2018 09:07Тогда мне непонятно, как у вас работает система. Обычно пневмеркаторные системы на судах и платформах выглядят примерно так:
Во все трубки через которые измеряем уровень в танке или осадку с определенной периодичностью подаем воздух открытием солиноидного клапана на короткое время. Давление воздуха немного больше чем максимально возможный уровень. Лишний воздух из трубки выходит и остается только удерживаемый столбом жидкости. Его давление уже пересчитываем в осадку учитывая плотность воды. Соответственно в режиме баластировки продувка происходит чаще.
VRU это vertical reference unit, дает нам вертикальные перемещения судна, но сейчас я уже понял что они Вам не подойдут, потому что это скорее для перемещений создаваемых волнением. а у Вас все как я понял медленно происходит.dima32768 Автор
14.09.2018 09:39Это не пневмеркаторная система. Это просто погружные датчики гидростатического давления. В балластные отсеки они просто опущены и закреплены на дне отсека. Забортные — через клапаны.
gorbln
14.09.2018 10:16А вариант замены датчиков на датчики прямого измерения уровня (радарные, например) не рассматривали? Всё-таки, измерение давления столба жидкости — не совсем то, что ожидаешь. Плюс, датчики могут подвирать из-за температуры. С одной стороны корпус лодки греется солнышком, с другой стороны — в тени, вот и разница температур, и это не 1-2 градуса. Разная температура воды — разная её плотность, разное давление. Но как-то уж больно много, конечно…
Ну и поставить акселерометры, конечно, здравая мысль. Хотя бы в качестве информационных датчиков. Для арбитража поставить два или три датчика (они стоят копейки), и фильтровать их показания медианой или чем там ещё.dima32768 Автор
14.09.2018 13:32Рассматривали. Проблема в том, что датчики должны располагаться на палубе, которая заливается водой при спуске объекта. Конечно, можно сделать герметичные коробки. Для погружных датчиков мы сделали двойные коммутационные коробки, каждую из которых опрессовывали на давление 2 атм. Кроме того, радарные датчики не поставишь для измерения осадки судна.
anonymous
14.09.2018 13:33ПЛК от ABB. Программа видимо не сложная, судя по тексту все в основном в ручном режиме или борьбу с гидроударами как-то автоматизировали в итоге?
dima32768 Автор
14.09.2018 13:37Да, программа не сложная, но объёмная. Борьбу с гидроударами автоматизировали. Как я уже писал, одна из мер- это замедление задвижек, вторая — это автоматическое изменение оборотов дизель-насосов при смене режима.

velociraptor
14.09.2018 23:31А в воздушной системе у вас там какое давление? И трубки к приводу какого диаметра? Бывает, привод медленно заполняется воздухом и поршни в нем идут с дерганьем — частая причина гидроударов. Ну и выхлоп из привода обычно надо «придушить», иногда до нескольких минут время срабатывания доводится. Что за привод, кстати?
oxff
15.09.2018 05:18Английский текст "шутки" содержит кучу ошибок. Потеряны сказуемые и т.п. Может еще и поэтому иностранцы не захотели его принять? Хотя скорее им просто не понравился жесткий характер этого текста. Юмор явно был рассчитан на слесарей.
В остальном же — отлично, очень интересно. Интересно было бы увидеть продолжение. Спасибо!
RouR
Влияние плотности воды на осадку судна
О причинах изменения плотности воды — надо смотреть географию. Или измеряйте её.
dima32768 Автор
Безусловно, плотность воды учитывается при проектировании судна. Ссылка
Если предположить, что причина — изменение плотности, тогда береговой корпус должен был находиться в струе морской воды или стрежневой — в струе нефтепродуктов. К счастью, это не происходит. Но на самом деле изменения осадки не было. Это какой-то глюк, связанный, вероятно, с условиями обтекания корпусов речной водой.