

В прошлый раз мы кратко рассмотрели один из самых замечательных физических принципов — принцип наименьшего действия, и остановились на примере, который, казалось бы, ему противоречит. В данной статье мы разберемся с этим принципом немного подробнее и посмотрим, что происходит в данном примере.
На этот раз нам понадобится чуть больше математики. Однако основную часть статьи я опять постараюсь изложить на элементарном уровне. Чуть более строгие и сложные моменты я буду выделять цветом, их можно пропустить без ущерба для основного понимания статьи.
Граничные условия
Начнем мы с самого простого объекта – шара, свободно двигающегося в пространстве, на который не действуют никакие силы. Такой шар, как известно, двигается равномерно и прямолинейно. Для простоты, предположим, что он двигается вдоль оси :

Чтобы точно описать его движение, как правило, задаются начальные условия. Например задается, что в начальный момент времени шар находился в точке с координатой и имел скорость . Задав начальные условия в таком виде, мы однозначно определяем дальнейшее движение шара — он будет двигаться с постоянной скоростью, и его положение в момент времени будет равно начальному положению плюс скорость, умноженная на прошедшее время: . Такой способ задания начальных условий очень естественен и интуитивно привычен. Мы задали всю необходимую информацию о движении шара в начальный момент времени, и дальше его движение определяется законами Ньютона.
Однако это не единственный способ задания движения шара. Другой альтернативный способ – это задать положение шара в два разных момента времени и . Т.е. задать, что:
1) в момент времени шар находился в точке (с координатой );
2) в момент времени шар находился в точке (с координатой ).
Выражение «находился в точке » не означает, что шар покоился в точке . В момент времени он мог пролетать через точку . Имеется ввиду, что его положение в момент времени совпадало с точкой . То же самое относится и к точке .
Эти два условия также однозначно определяют движение шара. Его движение легко вычислить. Чтобы удовлетворить обоим условиям, скорость шара, очевидно должна быть . Положение шара в момент времени будет опять равно начальному положению плюс скорость, умноженная на прошедшее время: Заметьте, что в условиях задачи нам не потребовалось задавать начальную скорость. Она однозначно определилась из условий 1) и 2).
Задание условий вторым способом выглядит непривычно. Возможно, непонятно зачем вообще может потребоваться задавать их в таком виде. Однако, в принципе наименьшего действия используются именно условия в виде 1) и 2), а не в виде задания начального положения и начальной скорости.
Траектория с наименьшим действием
Теперь немного отвлечемся от реального свободного движения шара и рассмотрим следующую чисто математическую задачу. Допустим, у нас есть шар, который мы можем вручную перемещать каким угодно способом. При этом нам нужно выполнить условия 1) и 2). Т.е. в промежуток времени между и мы должны переместить его из точки в точку . Это можно сделать совершенно разными способами. Каждый такой способ мы будем называть траекторией движения шара и он может быть описан функцией положения шара от времени . Отложим несколько таких траектории на графике зависимости положения шарика от времени:

Например, мы можем перемещать шарик с одной и той же скоростью, равной (зеленая траектория). Или мы можем половину времени держать его в точке , а затем с двойной скоростью переместить в точку (синяя траектория). Можно сперва двигать его в противоположную от сторону, а затем уже переместить в (коричневая траектория). Можно двигать его взад и вперед (красная траектория). В общем, можно передвигать его как угодно, лишь бы соблюдались условия 1) и 2).
Для каждой такой траектории мы можем сопоставить число. В нашем примере, т.е. в отсутствии каких-либо сил, действующих на шар, это число равняется общей накопленной кинетической энергии за все время его движения в промежуток времени между и и называется действием.
В данном случае слово «накопленная» кинетическая энергия не очень точно передает смысл. Реально кинетическая энергия нигде не накапливается, накопление используется лишь для вычисления действия для траектории. В математике для такого накопления имеется очень хорошее понятие — интеграл: Действие обычно обозначается буквой . Символ означает кинетическую энергию. Данный интеграл означает, что действие равно накопленной кинетической энергии шара за промежуток времени от до .В качестве примера, давайте возьмем шар массой 1 кг., зададим какие-нибудь граничные условия и вычислим действие для двух разных траекторий. Пусть точка находится на расстоянии 1 метр от точки , а время отстоит от времени на 1 секунду. Т.е. мы должны переместить шар, который в начальный момент времени был в точке , за одну секунду на расстояние 1 м. вдоль оси .
В первом примере (зеленая траектория) мы перемещали шар равномерно, т.е. с одинаковой скоростью, которая, очевидно, должна быть равна: м/с. Кинетическая энергия шара в каждый момент времени равна: = 1/2 Дж. За одну секунду накопится 1/2 Дж с кинетической энергии. Т.е. действе для такой траектории равно: Дж с.
Теперь давайте шар будем не сразу переносить из точки в точку , а полсекунды придержим его в точке , а затем, за оставшееся время равномерно перенесем его в точку . В первые полсекунды шар покоится и его кинетическая энергия равна нулю. Поэтому вклад в действие этой части траектории также равен нулю. Вторые полсекунды мы переносим шар с двойной скоростью: м/с. Кинетическая энергия при этом будет равна = 2 Дж. Вклад этого промежутка времени в действие будет равен 2 Дж умножить на полсекунды, т.е. 1 Дж с. Поэтому общее действие для такой траектории получается равно Дж с.
Аналогично, любой другой траектории с заданными нами краевыми условиями 1) и 2) соответствует некоторое число, равное действию для данной траектории. Среди всех таких траекторий имеется траектория, у которой действие меньше всего. Можно доказать, что этой траекторией является зеленая траектория, т.е. равномерное движение шара. Для любой другой траектории, какой бы хитрой она не была, действие будет больше 1/2.
В математике такое сопоставление для каждой функции определенного числа называется функционалом. Достаточно часто в физике и математике возникают задачи подобные нашей, т.е. на отыскание такой функции, для которой значение определенного функционала минимально. Например, одна из задач, имевших большое историческое значение для развития математики – это задача о бахистохроне. Т.е. нахождение такой кривой, по которой шарик скатывается быстрее всего. Опять, каждую кривую можно представить функцией h(x), и каждой функции сопоставить число, в данном случае время скатывания шарика. Снова задача сводится к нахождению такой функции, для которой значение функционала минимально. Область математики, которая занимается такими задачами называется вариационным исчислением.
{kind=link}
Принцип наименьшего действия
В разобранных выше примерах у нас появились две особые траектории, полученные двумя разными способами.
Первая траектория получена из законов физики и соответствует реальной траектории свободного шара, на который не действуют никакие силы и для которого заданы граничные условия в виде 1) и 2).
Вторая траектория получена из математической задачи нахождения траектории с заданными граничными условиями 1) и 2), для которой действие минимально.
Принцип наименьшего действия утверждает, что эти две траектории должны совпадать. Другими словами, если известно, что шарик двигался так, что выполнялись граничные условия 1) и 2), то он обязательно двигался по траектории, для которой действие минимально по сравнению с любой другой траекторией с теми же самыми граничными условиями.
Можно было бы посчитать это простым совпадением. Мало ли задач, в которых появляются равномерные траектории и прямые линии. Однако принцип наименьшего действия оказывается очень общим принципом, справедливым и в других ситуациях, например, для движения шара в равномерном поле тяжести. Для этого только нужно заменить кинетическую энергию на разность кинетической и потенциальной энергии. Эту разность называют Лагранжианом или функцией Лагранжа и действие теперь становится равно общему накопленному Лагранжиану. Фактически, функция Лагранжа содержит всю необходимую информацию о динамических свойствах системы.
Если мы запустим шар в равномерном поле тяжести таким образом, чтобы он пролетел точку в момент времени и прилетел в точку в момент времени , то он, согласно законам Ньютона полетит по параболе. Именно эта парабола совпадет с траекторий, для которой действие будет минимально.
Таким образом, для тела, двигающегося в потенциальном поле, например, в гравитационном поле Земли, функция Лагранжа равна: . Кинетическая энергия зависит от скорости тела, а потенциальная — от его положения, т.е. координат . В аналитической механике всю совокупность координат, определяющих положение системы, обычно обозначают одной буквой . Для шара, свободно двигающегося в поле тяжести, означает координаты , и .
Для обозначения скорости изменения какой-либо величины, в физике очень часто просто ставят точку над этой величиной. Например, обозначает скорость изменения координаты , или, иными словами, скорость тела в направлении . Используя эти соглашения, скорость нашего шара в аналитической механике обозначается как . Т.е. означает компоненты скорости .
Поскольку функция Лагранжа зависит скорости и координат, а также может явно зависеть от времени (явно зависит от времени означает, что значение в разные моменты времени разное, при одинаковых скоростях и положениях шара) то действие в общем виде записывается как
Не всегда минимальное
Однако в конце предыдущей части мы рассмотрели пример, когда принцип наименьшего действия явно не работает. Для этого мы опять взяли свободный шарик, на который не действуют никакие силы и поместили рядом с ним пружинящую стенку.
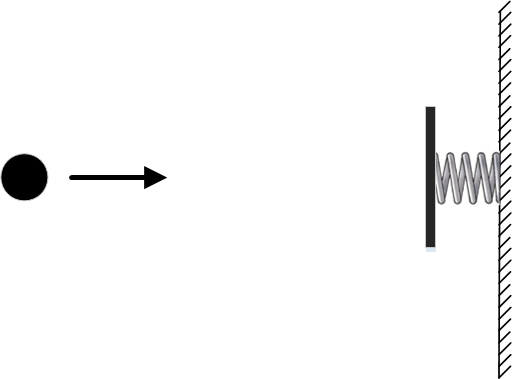
Граничные условия мы задали такими, что точки и совпадают. Т.е. и в момент времени и в момент времени шар должен оказаться в одной и той же точке . Одной из возможных траекторий будет являться стояние шара на месте. Т.е. весь промежуток времени между и он простоит в точке . Кинетическая и потенциальная энергия в этом случае будут равны нулю, поэтому действие для такой траектории также будет равно нулю.
Строго говоря, потенциальную энергию можно взять равной не нулю, а любому числу, поскольку важна разность потенциальной энергии в разных точках пространства. Однако изменение значения потенциальной энергии не влияет на отыскание траектории с минимальным действием. Просто для всех траекторий значение действия изменится на одно и то же число, и траектория с минимальным действием так и останется траекторией с минимальным действием. Для удобства, для нашего шара мы выберем потенциальную энергию равной нулю.Другой возможной физической траекторией с теми же граничными условиями будет траектория при которой шарик сначала летит вправо, пролетая точку в момент времени . Затем он сталкивается с пружиной, сжимает ее, пружина, распрямляясь, отталкивает шарик обратно, и он опять пролетает мимо точки . Можно подобрать скорость движения шара такой, чтобы он, отскочив от стенки, пролетел точку точно в момент . Действие при такой траектории будет в основном равно накопленной кинетической энергии во время полета между точкой и стенкой и обратно. Будет какой-то промежуток времени, когда шарик сожмет пружину и его потенциальная энергия увеличится, и в этот промежуток времени потенциальная энергия внесет отрицательный вклад в действие. Но такой промежуток времени будет не очень большим и сильно действие не уменьшит.

На рисунке нарисованы обе физически возможные траектории движения шара. Зеленая траектория соответствует покоящемуся шару, в то время как синяя соответствует шару, отскочившему от пружинящей стенки.
Однако минимальным действием обладает только одна из них, а именно первая! У второй траектории действие больше. Получается, что в данной задаче имеются две физически возможных траектории и всего одна с минимальным действием. Т.е. в данном случае принцип наименьшего действия не работает.
Стационарные точки
Чтобы понять в чем тут дело, давайте отвлечемся пока от принципа наименьшего действия и займемся обычными функциями. Давайте возьмем какую-нибудь функцию и нарисуем ее график:
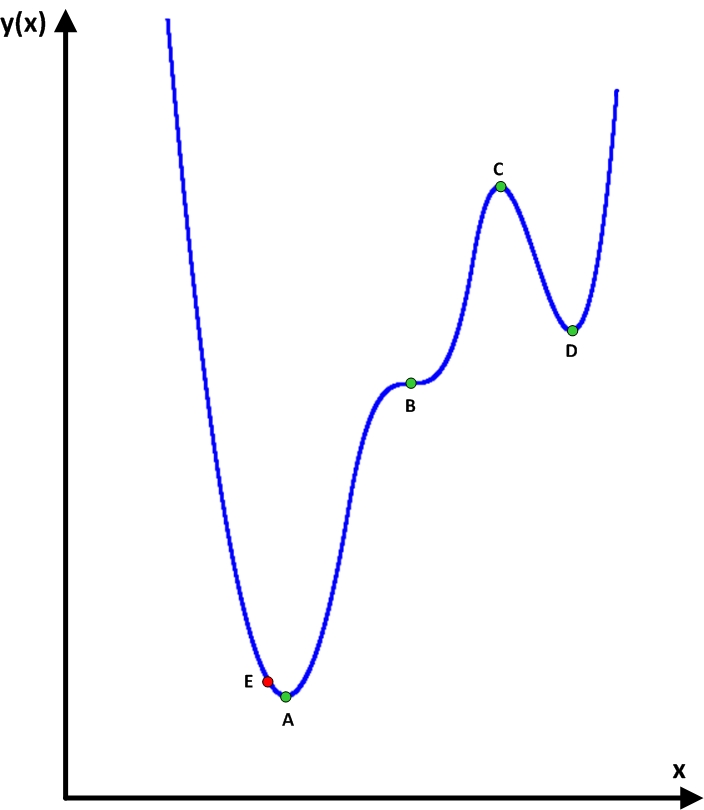
На графике я отметил зеленым цветом четыре особенных точки. Что является общим для этих точек? Представим, что график функции – это реальная горка, по которой может катиться шарик. Четыре обозначенных точки особенны тем, что если установить шарик точно в данную точку, то он никуда не укатится. Во всех остальных точках, например, точке E он не сможет устоять на месте и начнет скатываться вниз. Такие точки называют стационарными. Нахождение таких точек является полезной задачей, поскольку любой максимум или минимум функции, если она не имеет резких изломов, обязательно должен являться стационарной точкой.
Если точнее классифицировать данные точки, то точка A является абсолютным минимумом функции, т.е. ее значение меньше, чем любое другое значение функции. Точка B – не является ни максимумом, ни минимумом и называется седловой точкой. Точка С называется локальным максимумом, т.е. значение в ней больше, чем в соседних точках функции. А точка D – локальным минимумом, т.е. значение в ней меньше, чем в соседних точках функции.
Поиском таких точек занимается раздел математики, называемый математическим анализом. По другому его еще иногда называют анализом бесконечно малых, поскольку он умеет работать с бесконечно малыми величинами. С точки зрения математического анализа стационарные точки обладают одним особенным свойством, благодаря которому их и находят. Чтобы понять, что это за свойство, нам нужно понять, как выглядит функция на очень малых расстояниях от этих точек. Для этого мы возьмем микроскоп и посмотрим в него на наши точки. На рисунке показано как выглядит функция в окрестности различных точек при различном увеличении.
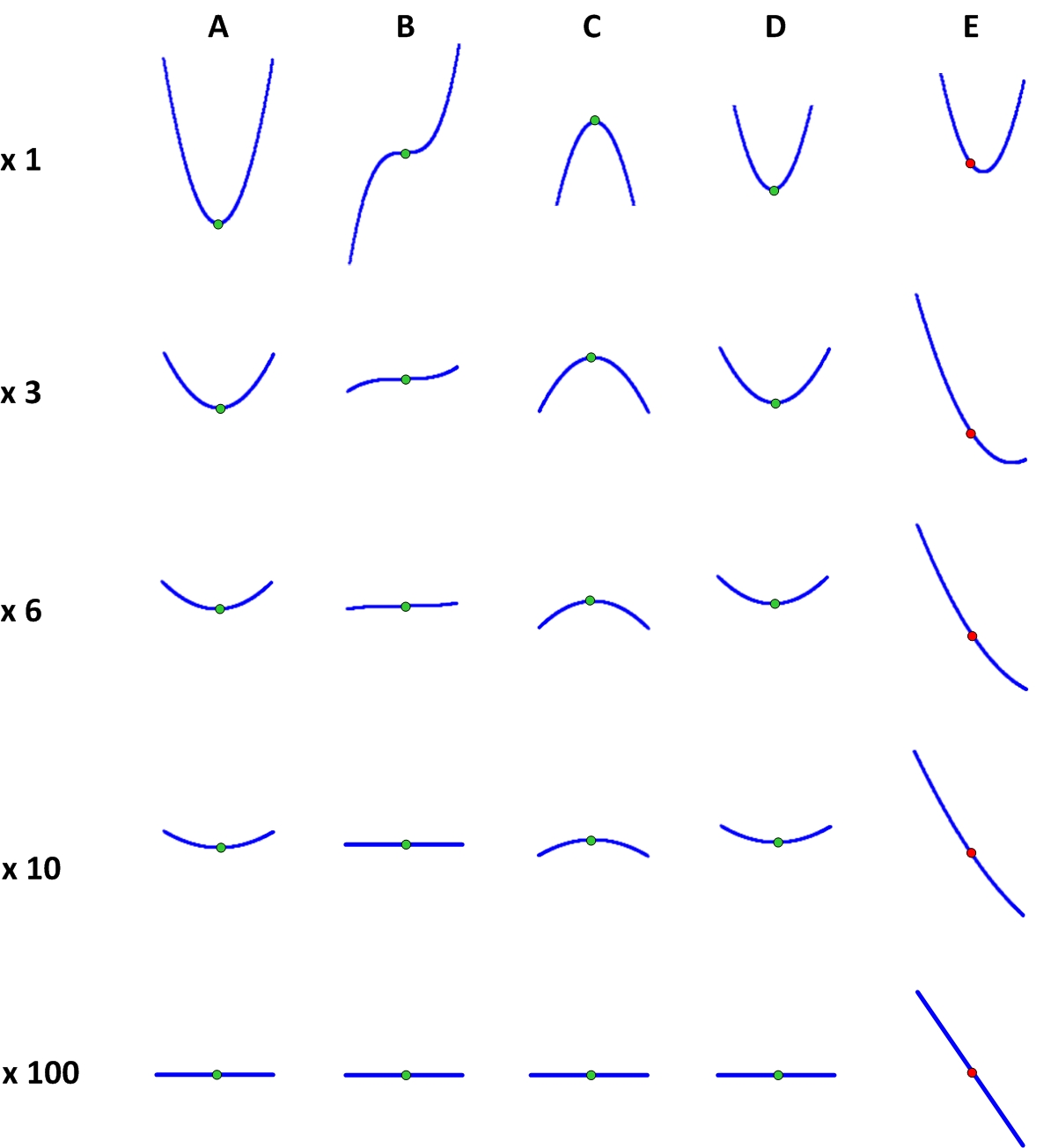
Видно, что при очень большом увеличении (т.е. при очень малых отклонениях x) стационарные точки выглядят абсолютно одинаково и сильно отличаются от нестационарной точки. Легко понять в чем заключается это отличие – график функции в стационарной точке при увеличении становится строго горизонтальной линией, а в нестационарной – наклонной. Именно поэтому шарик, установленный в стационарной точке, не будет скатываться.
Горизонтальность функции в стационарной точке можно выразить по другому: функция в стационарной точке практически не меняется при очень малом изменении своего аргумента , даже по сравнению с самим изменением аргумента. Функция же в нестационарной точке при малом изменении меняется пропорционально изменению . И чем больше угол наклона функции, тем сильнее меняется функция при изменении . На самом деле, функция при увеличении становится все больше похожа на касательную к графику в рассматриваемой точке.
На строгом математическом языке выражение «функция практически не меняется в точке при очень малом изменении » означает, что отношение изменения функции и изменения ее аргумента стремится к 0 при стремящемся к 0:
Для нестационарной точки это отношение стремится к ненулевому числу, которое равно тангенсу угла наклона функции в этой точке. Это же число называют производной функции в данной точке. Производная функции показывает, насколько быстро меняется функция около данной точки при небольшом изменении ее аргумента . Таким образом, стационарные точки – это точки, в которых производная функции равна 0.
Стационарные траектории
По аналогии со стационарными точками можно ввести понятие стационарных траекторий. Вспомним, что у нас каждой траектории соответствует определенное значение действия, т.е. какое-то число. Тогда может найтись такая траектория, что для близких к ней траекторий с теми же граничными условиями, соответствующие им значения действия практически не будут отличаться от действия для самой стационарной траектории. Такая траектория называется стационарной. Другими словами, любая траектория близкая к стационарной будет иметь значение действия, очень мало отличающееся от действия для этой стационарной траектории.
Опять, на математическом языке «мало отличающееся» имеет следующий точный смысл. Допустим, что у нас задан функционал для функций с требуемыми граничными условиями 1) и 2), т.е. и . Допустим, что траектория – стационарна.
Мы можем взять любую другую функцию , такую, что на концах она принимает нулевые значения, т.е. = = 0. Также возьмем переменную , которую мы будем делать все меньше и меньше. Из этих двух функций и переменной мы можем составить третью функцию , которая также будет удовлетворять граничным условиям и . При уменьшении траектория, соответствующая функции , будет все сильнее приближаться к траектории .
При этом для стационарных траекторий при малых значение функционала у траекторий будет отличаться очень мало от значения функционала для даже по сравнению с . Т.е.
При чем это должно быть справедливо для любой траектории , удовлетворяющей граничным условиям = = 0.
Изменение функционала при малом изменении функции (точнее, линейная часть изменения функционала, пропорциональная изменению функции) называется вариацией функционала и обозначается . От термина «вариация» и происходит название «вариационное исчисление».
Для стационарных траекторий вариация функционала .
Метод нахождения стационарных функций (не только для принципа наименьшего действия, но и для многих других задач) нашли два математика — Эйлер и Лагранж. Оказывается, что стационарная функция, чей функционал выражается интегралом, подобным интегралу действия, должна удовлетворять определенному уравнению, которое теперь называется уравнением Эйлера-Лагранжа.
Принцип стационарного действия
Ситуация с минимумом действия для траекторий аналогична ситуации с минимумом для функций. Чтобы траектория обладала наименьшим действием, она обязана быть стационарной траекторией. Однако не все стационарные траектории – это траектории с минимальным действием. Например, стационарная траектория может иметь минимальное действие локально. Т.е. у нее действие будет меньше, чем у любой другой соседней траектории. Однако где-то далеко могут находиться другие траектории, для которых действие будет еще меньше.
Оказывается, реальные тела могут двигаться не обязательно по траекториям с наименьшим действием. Они могут двигаться по более широкому набору особых траекторий, а именно -стационарным траекториям. Т.е. реальная траектория тела всегда будет стационарной. Поэтому принцип наименьшего действия правильнее назвать принципом стационарного действия. Однако по сложившейся традиции его часто называют принципом наименьшего действия, подразумевая по этим не только минимальность, но и стационарность траекторий.
Теперь мы можем записать принцип стационарного действия на математическом языке, как его обычно записывают в учебниках: .Если вернуться к примеру с шаром и упругой стенкой, то объяснение этой ситуации теперь становится очень простым. При заданных граничных условиях, что шар должен и во время и во время оказаться в точке существуют две стационарные траектории. И по любой из этих траекторий может реально двигаться шар. Чтобы явно выбрать одну из траекторий, можно на движение шара наложить дополнительное условие. Например, сказать, что шар должен отскочить от стенки. Тогда траектория определится однозначно.
Здесь — это обобщенные координаты, т.е. набор переменных, однозначно задающих положение системы.
— скорости изменения обобщенных координат.
— функция Лагранжа, которая зависит от обобщенных координат, их скоростей и, возможно, времени.
— действие, которое зависит от конкретной траектории движения системы (т.е. от ).
Реальные траектории системы стационарны, т.е. для них вариация действия .
Из принципа наименьшего (точнее стационарного) действия следуют некоторые замечательные следствия, о которых мы поговорим в следующей части.
Комментарии (49)

KonkovVladimir
20.10.2018 08:03На шарик могут действовать силы в зависимости от того в какой точке он находится на приведенной ниже картинке.

Для проведения эксперимента мне лагранжиан не нужен, но если вам требуется — вычислите его сами. Начальную и конечную координату я вам задал, начальная скорость вам не нужна — как скажете, хозяин барин.
В эксперименте я измеряю траекторию — зависимость координаты шарика от времени, сможете ее предсказать?
andrew526d Автор
20.10.2018 09:04В данном случае существует две стационарные траектории, одна когда шарик покоится, другая — когда отскакивает от стенки.
Я понимаю, что вы хотите сказать. Что для выбора из этих двух вариантов нужно задать начальную скорость. Точнее, нужно сначала вычислить начальную скорость во втором варианте, поскольку она должна иметь строго определённое значение, иначе шарик не вернётся в нужное время. А потом выбрать из двух вариантов начальных скоростей.
Действительно, можно поступить так. Но для выбора из этих двух вариантов траекторий не обязательно задавать именно начальную скорость. Можно, например, указать, сталкивался ли шарик со стенкой.
Т. е. для определения возможных траекторий шарика знание начальной скорости не нужно. Для выбора конкретной траекторий, действительно, можно использовать начальную скорость, но не обязательно именно её.
KonkovVladimir
20.10.2018 11:52В жизни все обычно гораздо сложнее, если добавить пружину слева, то имеем уже три траектории, а если сверху и снизу, то 5, а если окружить шарик пружинящей сферой — то бесконечное количество траекторий.
Чтобы совершить выбор в этом случае, по-вашему теперь нужно указывать координаты точки соударения шарика со сферой, которая лежит на прямой продолжающей вектор скорости, либо если вектор скорости нулевой, то точки пересечения нет.
В конце концов мы все равно вернулись к вектору скорости, либо к его более туманному определению через «координаты точки столкновения», или ее отсутствие.
P.S. В случае с одной пружиной та-же ситуация либо вектор скорости пересекает подпружиненную площадку, либо нулевой и не пересекает.andrew526d Автор
20.10.2018 12:14Да, все так и есть, как вы написали. В случае шарика в центре пружинящей сферы получается бесконечное количество стационарных траекторий.
Для выбора, или указания конкретной траектории нужна дополнительная информация. Можно указывать начальную скорость, можно указывать конечную скорость, можно указывать направление движение шара, можно указать точку соударения со сферой и т. д. Вариантов множество.

rinaty
21.10.2018 01:46Кстати даже с двумя пружинами уже почти бесконечное число вариантов (шар мог успеть отразиться два, три или так далее число раз).
technic93
20.10.2018 10:35Отличная статья, все правильно и доступно написано. Все опровергатели прежде чем опровергать пусть сначала откроют учебник.
MaximZav
21.10.2018 17:00Не будет ли лагранжиан зависеть от наличия/отсутствия стенки? Если я правильно помню, то потенциальная энергия — лишь способ описать наличие внешних сил, зависящих от конфигурации системы точек/тел.
andrew526d Автор
21.10.2018 17:15Конечно, будет. Если шарик находится в таком месте, что он сжимает пружину, то у него появляется потенциальная энергия.
MaximZav
21.10.2018 18:21Тогда следующий вопрос — если шарик изначально покоится или имеет такую скорость, что он пролетит мимо стенки, то у него лагранжиан будет состоять только из кинетической энергии, а если он летит в стенку, то лагранжиан должен учитывать потенциальную энергию (или её изменение), появляющуюся при взаимодействии со стенкой.
Хотелось бы понять.
KonkovVladimir
Граничные условия задаются не только начальными координатами, но и скоростями, нет?
Законы сохранения энергии и импульса должны соблюдаться при варьировании траекторий или в противном случае мы начинаем выбирать между «теплым» и «мягким».
Давайте вашу теорию проверим в эксперименте, у меня есть шарик с начальным положением в точке А и конечным то же в точке А, по какой траектории он будет двигаться, согласно вашей теории?
andrew526d Автор
Если заданы начальное и конечное положения системы, то для нахождения стационарных траектория, т. е. возможных траекторий движения системы, начальную скорость задавать не нужно.
Законы сохранения энергии не обязаны сохраняться при варьировании (т. е. при небольшом изменении траектории).
Давайте проверим на эксперименте. Но нужно для этого сначала задать Лагранжиан для шарика. На шарик не действуют никакие силы, т. е. его Лагранжиан равен кинетической энергии?
maisvendoo
Какую задачу динамики — прямую или обратную, решаете Вы в рассмотренных Вами примерах?
andrew526d Автор
По смыслу ПНД ближе к обратной задаче, т.е. нахождению траектории при известном потенциале, но она не является обратной задачей в чистом виде, поскольку по другому задаются граничные условия.
maisvendoo
Вы не знаете что такое обратная задача динамики, хотя решаете именно её, работая с заранее известными траекториями
Нахождение траектории при известном потенциале (при известных силах) — это прямая задача динамики
andrew526d Автор
Послушайте, мы сейчас опять будем обсуждать кто чего знает и не знает? Кому нужно изучить учебник? Мне такая дискуссия не интересна.
Если есть что-то конкретное обсудить по теме, давайте обсуждать это, а не друг друга.
По поводу прямой и обратной задачи, по вашей ссылке написано, что используется и прямо обратная терминологиия. Я встречал именно обратную. Хотите использовать ту, к которой привыкли вы, я не возражаю, главное, чтобы мы имели в виду одно и то же. Пускай прямая задача — это задача нахождения траектории по известным силам.
Тогда, на мой взгляд, ПНД ближе к прямой задаче. В ПНД потенциальная энергия, т.е. фактически силы известны (Лагранжиан задан), на выходе определяется семейство возможных траекторий.
maisvendoo
Хорошо, но тогда позвольте как это соотносится с Вашим текстом? Вы, за исключением одного примера, оперируете уже с готовыми траекториями движения шарика, проходящими через заданные Вами точки. Какое отношение это имеет к прямой задаче, в которой траектория движения заранее неизвестна?
andrew526d Автор
Почему оперирую с готовыми траекториями? В ПНД на вход подаются граничные условия. Это ведь ещё не готовые траектории? ПНД как раз их и готовит, т. е. из всех траекторий оставляет только стационарные.
maisvendoo
В ПНД — да. У Вас же в задаче об отскоке от стены анализируются две действительные траектории. Готовые траектории
andrew526d Автор
А что вы имеете ввиду под анализом готовых траекторий? Сравнение действия у этих траекторий?
maisvendoo
Разумеется
andrew526d Автор
Ну, если говорить про такой анализ, то он мало похож как на прямую, так и на обратную задачи динамики.
maisvendoo
Очень хорошо, то есть ПНД, можно рассматривать как способ нахождения траектории по заданному потенциалу, то есть как прямую задачу динамики. Вы же решаете другую задачу, так?
andrew526d Автор
ПНД можно рассматривать как способ нахождения семейства траекторий, (их может оказаться несколько) по заданному потенциалу и граничные условиям.
Про какую именно задачу вы спрашиваете?
technic93
Вы их можете вывести из уравнений Э.Л. Хотя какой именно формы там потенциальный барер не так важно. Главное чтобы точка отскочила.
technic93
KonkovVladimir
Вы хотите рассказать про интегралы по траекториям, боюсь что сюрприз меня там давно не ждет.
technic93
Я про экспериментальную сторону вопроса.
KonkovVladimir
Кот уже в гробу вертится от вашей экспериментальной части.
technic93
Зачем мучать бедного кота если есть електроны.
maisvendoo
И все таки, используя только условие равенства нулю вариации действия, то есть математическую формулировку пнд, объясните, почему, покоящаяся в пустом пространстве точка именно покоится?
andrew526d Автор
Покоящаяся в пустом пространстве точка покоится, потому что она покоящаяся. Вы же сами в вопросе задали ее состояние.
Если серьезно, то видимо, правильнее сформулировать вопрос: почему в пустом пространстве (без каких-либо действующих на нее сил) точка может покоиться? Этот вопрос вполне имеет смысл, поскольку, например, в поле тяжести, точка постоянно покоиться не может.
Ответ простой: потому-что в пустом пространстве покой точки — это одна из стационарных траекторий. В поле тяжести такой стационарной траектории не существует. В поле тяжести стационарные траектории — параболы.
Как из ПНД при Гамильаниане равном кинетической энергии, при помощи уравнений Эйлера-Лагранжа получить результат, что в пустом пространстве все стационарные траектории для точки — это траектории с постоянной скоростью, вы и сами, наверняка, знаете.
Частный случай постоянной скорости — нулевая скорость. Поэтому покоящаяся точка в пустом пространстве — это стационарная траектория.
maisvendoo
Конечно знаю, хоть я и неуч книг не читавший
x(t) = C1 * t + C2 (1)
Ну хорошо, а как же тогда последнее выражение в вашем тексте отвечает на вопрос, почему при законе движения (1) точка таки покоится?
andrew526d Автор
Я, видимо, не очень понимаю, в чем именно вопрос. При законе движения 1) точка может покоится, может равномерно двигаться. Всё зависит от граничных условий.
Я не очень понимаю, какие данные заданы и какой вывод должен получиться?
maisvendoo
Хорошо, поставлю вопрос по другому. Является ли (1) следствием из ПНД, примененного к задаче о точке в пустом пространстве (для простоты — пространство одномерно)?
andrew526d Автор
На мой взгляд — да.
maisvendoo
Хорошо, то есть Вы утверждаете, что множество траекторий, задаваемое законом (1), включая и состояние покоя (при С1 = 0), непосредственным образом вытекает из ПНД?
andrew526d Автор
Да.
maisvendoo
Здорово. То есть для механической системы мы имеем цепочку: Построение функции Лагранжа -> Применение ПНД -> Уравнения Эйлера-Лагранжа -> Интегрирование полученных ОДУ с ответом в виде выражения (1). Верно я рассуждаю, с Вашей точки зрения?
andrew526d Автор
Верно.
maisvendoo
Идем дальше. Во всех известных на эту тему литературных источниках (Л&Л, Гантмахер и т.п.) показан общий вывод, реализующий первые три этапа этой цепочки, приводящих к общим уравнениям движения для механических систем, движущихся под действием потенциальных сил, именуемым уравнениями Лагранжа 2-го рода. Общность рассуждений в источниках, дает основание более не применять ПНД, а от этапа построения функции Лагранжа сразу перейти к составлению дифференциальных уравнений движения на основе уравнения Лагранжа 2-го рода. Так?
andrew526d Автор
Так.
maisvendoo
То есть, начиная решать задачу о движении механической системы и взяв в качестве метода её решения формализм Лагранжа, получая в итоге семейство траекторий подобное (1) мы заведомо идем путем, в котором выполнение означенного выше принципа стационарности действия уже доказано общими рассуждениями.
Применяя к решению вида (1) краевые ли, начальные ли, условия мы получаем конкретную траекторию из этого семейства, имеющую конкретное численное значение действия. Правильно?
andrew526d Автор
Мы это все говорим про шарик в пустом пространстве? Если да, то пока все верно.
maisvendoo
Теперь уже неважно, о чем мы говорим. Мы рассматриваем механическую систему, для которой, с применением ПНД в общем виде, в литературе, получено общее же решение. И если, как Вы признаете выше, этот общий вывод теряет свою актуальность после того, как получены уравнения движения для механической системы, возникает следующий вопрос:
Для чего требуется повторно вычислять действие для траектории при конкретных (краевых или начальных) условиях?
andrew526d Автор
Если мы говорим про общий случай, то нужно сделать уточнение. При начальных условиях, т. е. задании начального положения и скорости мы получаем строго одну траекторию, а при граничных, т. е. начальном и конечном положении можем получить несколько возможных траекторий.
А что значит повторно вычислять действие? Для определения стационарных траекторий можно вообще не вычислять конкретные значения действий для них. Достаточно, чтобы траектории удовлетворяли уравнение ЭЛ, и они будут стационарными.
Я сравнивал значения действия на разных действительных траекториях только с одной целью — показать, что у действительной траектории действие не всегда минимально.
maisvendoo
Так это очевидная вещь, раз речь идет о локальном минимуме. Это никак не влияет на справедливость ПНД
andrew526d Автор
Ну для кого-то очевидная, для кого-то нет. В примере с пружинящей стенкой, скорее всего действительно абсолютный и локальный минимум, хотя доказать это не берусь.
А в общем случае для действительно траектории может быть не только локальный минимум, но и аналог седловой точки, т. е. сколь угодно близко могут быть траектории как с меньшим, так и с большим действием.
technic93
В пустом пространстве как раз вообще вопросов нет, если точка в момент t1 и t2 находится в одном и том же месте то единственная траектория это x(t) = const. т.е. точка покоится (О том как это получается из ПНД как раз написано в статье). А вот если вы добавите стенку то как раз всё становится интересно, посколько у действия теперь есть две стационарные траектории.