
Предыстория
Заканчивалось жаркое лето, позади был прекрасных семейный отдых на теплом ласковом море, и впереди уже проступали очертания серых рабочих будней. Чтобы не поддаться осенней депрессии надо было срочно заняться чем-то приятным и полезным и это что-то не заставило себя ждать: старшему сыну надо было подготовить работу к школьной конференции. Тема работы уже висела в воздухе достаточно давно. Я с большим интересом слежу за публикациями автора Neoprog “Разработка hexapod с нуля”. И именно его статьи подвигли нас на работу в этом направлении.
Конструкция
В качестве движущих элементов конструкции мы выбрали сервоприводы MG-996R. Из заявленных характеристик, они обладают достаточно высоким и силовыми характеристиками при относительно небольшой стоимости. Размеры и конструкция данного сервопривода легла в основу дальнейшей конструкции робота, которую изначально мы планировали изготовить из пластика методом 3D печати.
Первым делом был изготовлен и протестирован действующий прототип отдельной конечности.

Не имея опыта работы в программах 3D моделирования мы легкомысленно решили воплотить наши бумажные наброски в трехмерную модель с помощью встроенного в Windows 10 редактора 3D-билдера. При всей своей простоте этот редактор имеет довольно обширный арсенал и позволяет создавать достаточно сложные 3D-модели.
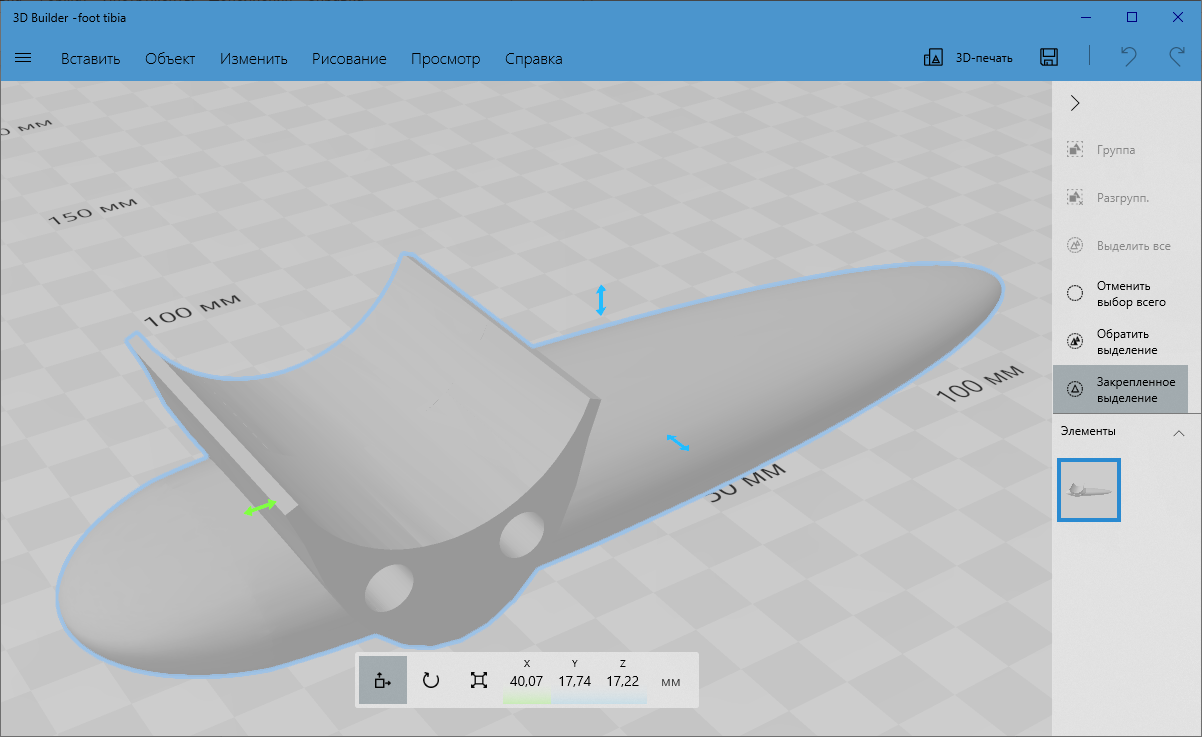
Но простота работы в этом редакторе, также является его слабым местом. Отсутствие контроля количества вершин в модели приводит к тому, что после многократных кромсаний и склеиваний несложная с виду модель, начинает обладать
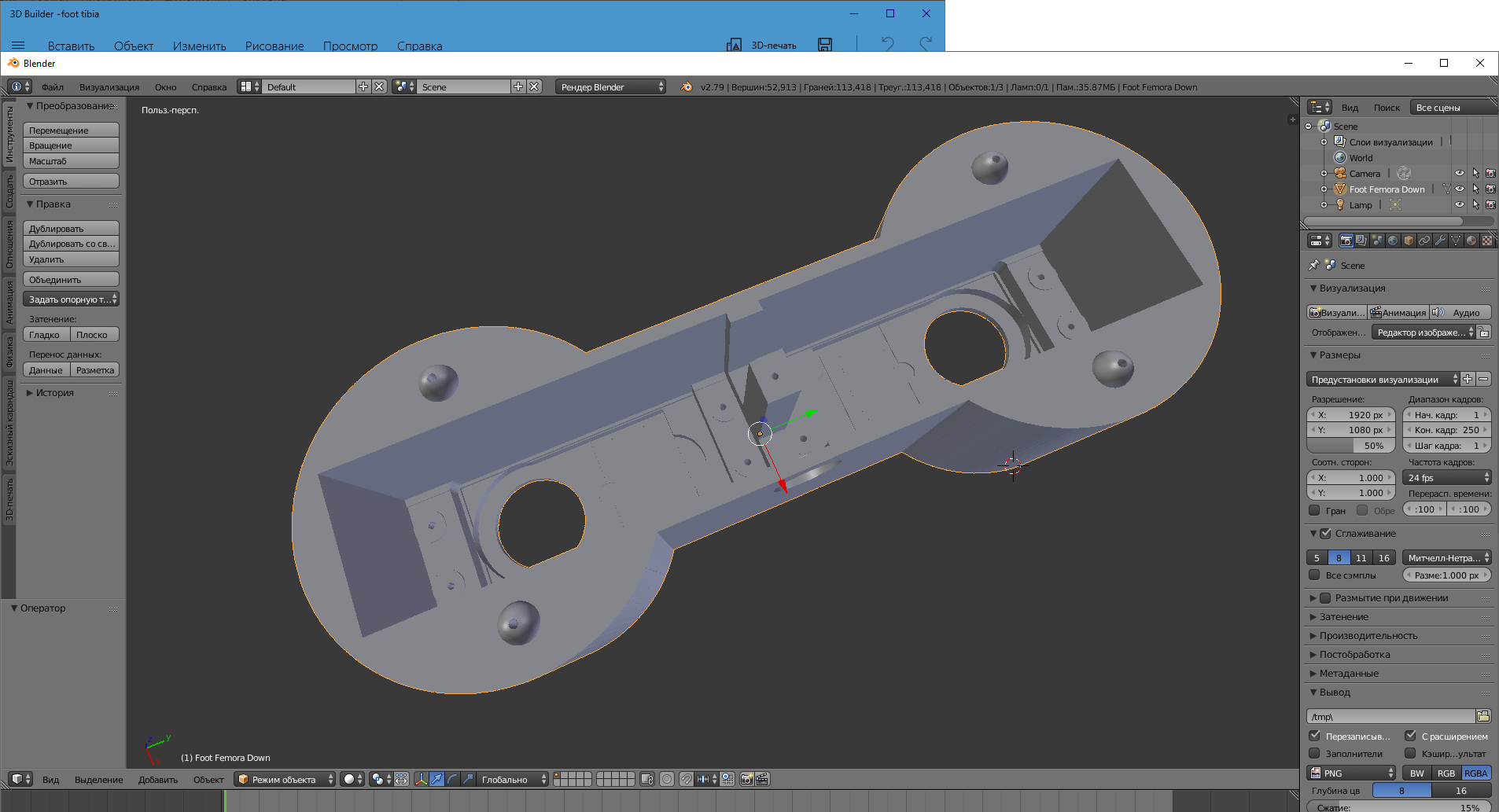
После беглого анализа доступных редакторов было принято использовать Blender по причине своей бесплатности
При конструировании конечности мы поставили задачу по максимуму скрыть сервоприводы внутри корпуса. В целом это удалось, но шлейфы все таки пришлось оставить снаружи в целях уменьшения механического воздействия при сгибании суставов. При этом, конструкция позволяет сохранить свободу движения суставов почти в максимальных пределах 0 — 180 градусов. Для уменьшения трения и износа в каждом суставе предусмотрен подшипник.

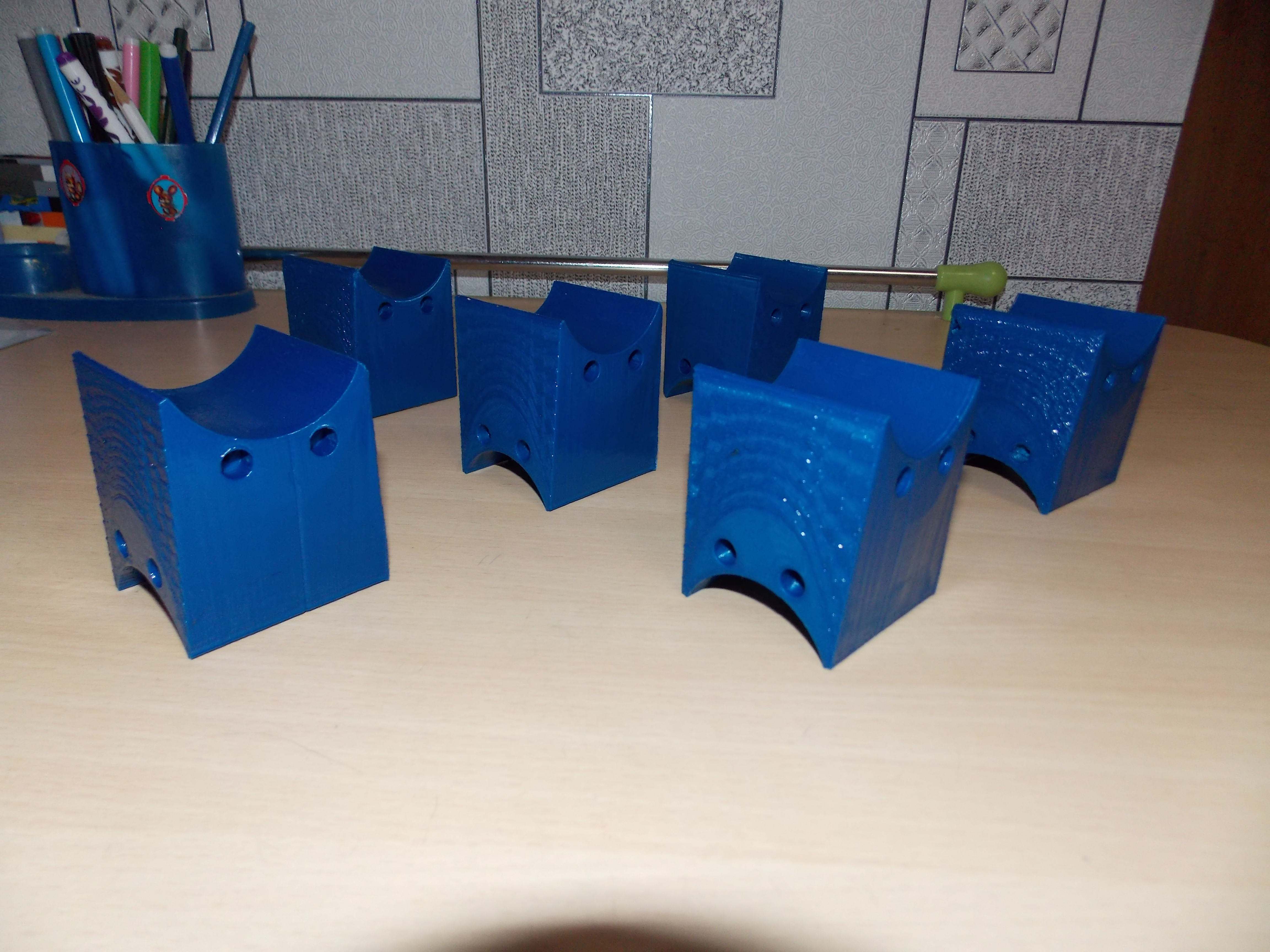
Для печати мы использовали принтер Infintary 3D Printer, купленный в “поднебесной” пару лет назад. Процесс довольно неспешный, так что для печати всего комплекта конечностей был потрачен не один день.

За это время мы сделали эскиз и построили 3D-модель рамы, к которой должны крепиться конечности. В ней же размещаются сервоприводы плечевых суставов.

Печать и сборка
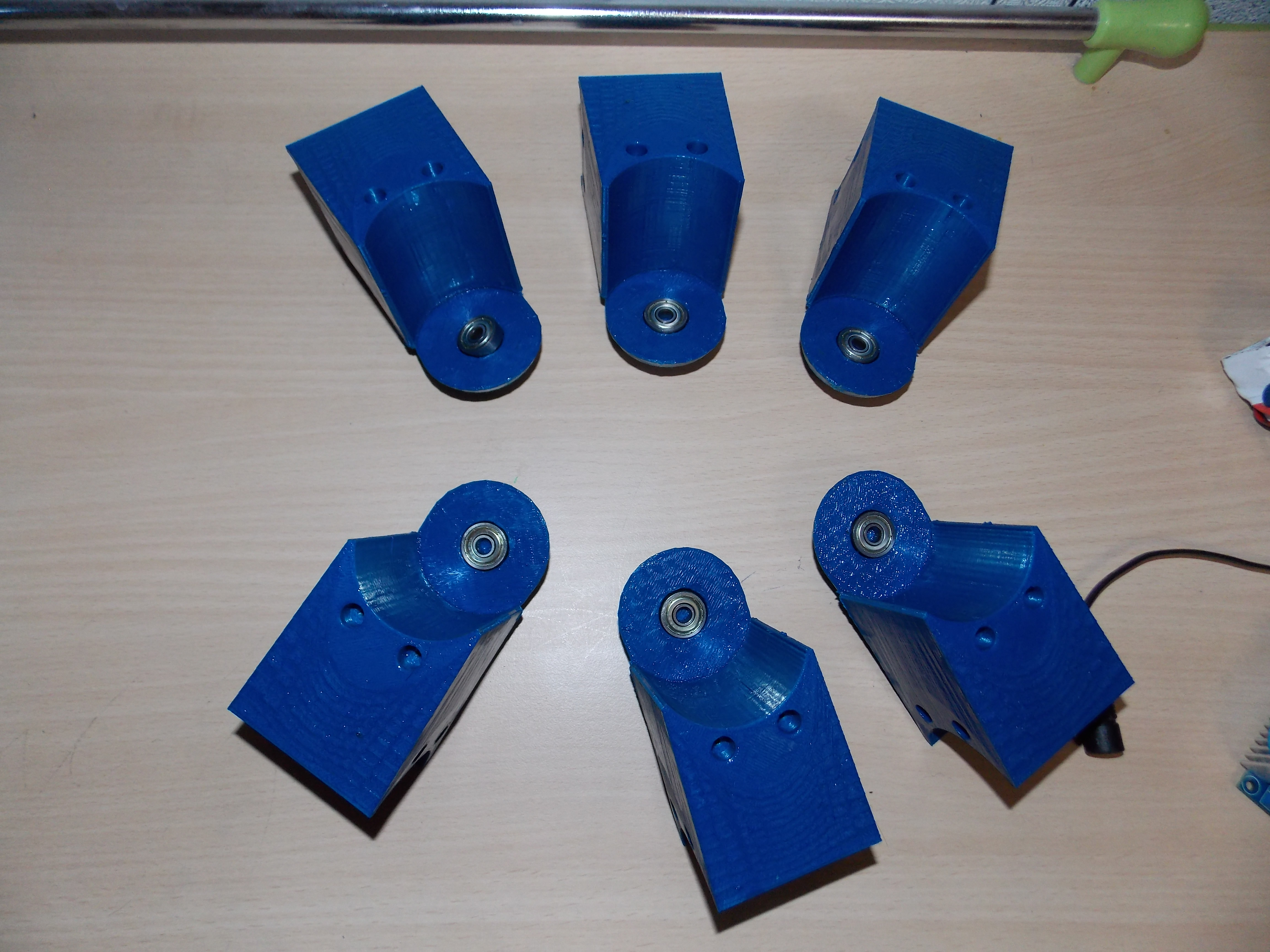
После завершения печати мы приступили к сборке конечностей и окончательной сборке. В разобранном варианте получился этакий конструктор:



При сборке главное не забыть вставить подшипники и тяги сервоприводов.

Важный момент: в момент сборки все сервоприводы должны быть приведены в среднее положение. Для калибровки положения плечевых суставов мы распечатали и дочертили специальный трафарет.


По итогу у нас получилась довольно симпатичная шестиногая платформа, оживлением которой был занят весь наш дальнейший досуг.

Электронная начинка
К этому времени основной набор электронной начинки для оживления робота был составлен и укомплектован. В него вошли готовые компоненты, а именно:
- Основной контроллер Arduino UNO + WiFi R3 ATmega328P + ESP8266
- Регулируемые стабилизаторы DC/DC Max 9A 300 Вт — 6 шт.
- Высокотоковые аккумуляторы HG2 18650 3000 mAh — 3 шт.
- Контроллер заряда BMS 3S 11,1 V 12,6 V 40A
- Multiservo Shield на 18 сервоприводов, управляемый по шине I2C.
Использование готовых компонентов негативно отразилось на размерах робота. Над основной рамой пришлось строить второй ярус, в котором мы разместили стабилизаторы и сервошилд.

Плата ардуино и система питания

На текущий момент бoльшую часть запланированной работы мы выполнили. «Гекса» (так мы назвали с сыном нашего робота) создан и им можно управлять через telnet или android устройства через специально написанное приложение.
Послесловие
На дворе уже глубокая зима, дни становятся все продолжительнее и ярче. А значит не за горами весна и хорошее настроение. Буду рад, если моя первая и надеюсь не последняя публикация была кому-нибудь интересна и полезна. Тема статьи была ориентирована только на описание процесса создания, поэтому программная начинка и все с остальное осталась за кадром. Если интересно, можно посвятить этой теме следующие статьи. Готов ответить на все вопросы.
Спасибо за уделенное внимание!
3D модель для скачивания









IronHead
Многие делают пауков, но никто не пишет про ПО.
Ну вот собрали его, а что дальше? Как оживлять? Есть же готовые фреймворки с правильным движением конечностей, но нигде нет статей как это все оживить.
BiosUefi
//нигде нет статей как это все оживить.
Мне кажется или вы сейчас посягнули на «святые скрижали» от Boston Dynamics?
//собрали его, а что дальше? Как оживлять? Есть же готовые фреймворки
а дальше, ребенку (и его папе) будут интересна любая деятельность с игрушкой.
И это радует.
Увы «правильные» движения из фреймворков исключительно по «правильному» и «плоскому» полу, без проскальзований. Без «чувства» пола(микрик и интеррапт от него куда надо), «свободного» хода мотора(т.е.эффект «повисшей» лапы), моторы с «изменяемым» ускорением. Будут еще долго привелегией богатых лабораторий.
it_pm
Нужна самообучающаяся нейросеть.