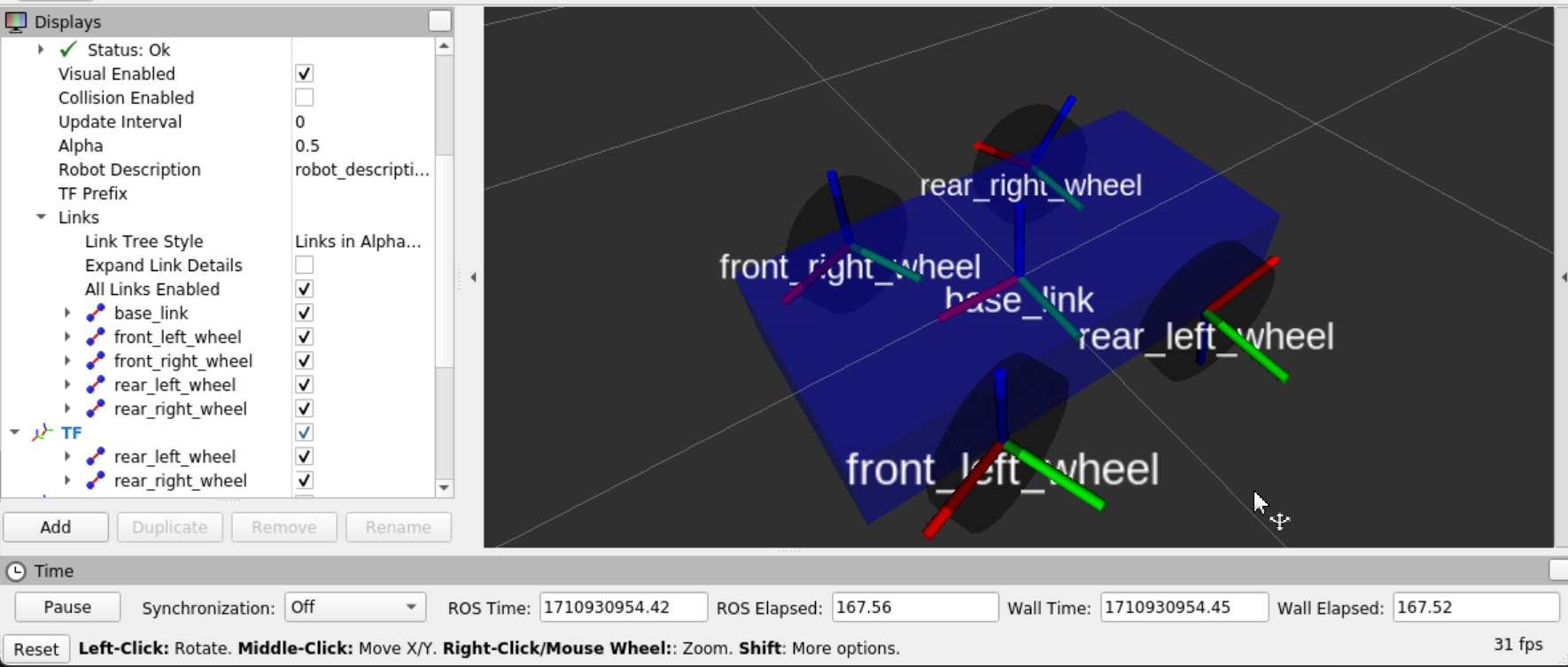
Контроллер управления по типу Аккерманна на базе 4-колёсной мобильной платформы (ROS Noetic) 21.03.2024 15:45 anton_shbk 2 Глобальные системы позиционирования Python Разработка робототехники Робототехника Будущее здесь Инженерные системы