
Вступление
Как-то во время чтения книги «Reinforcement Learning: An Introduction» я задумался над дополнением своих теоретических знаний практическими, однако решать очередную задачу балансировки бруска, учить агента играть в шахматы или же изобретать другой велосипед желания не было.
При этом в книге был один интересный пример на оптимизацию очереди клиентов, который с одной стороны не слишком сложен в плане реализации/понимания процесса, а с другой — вполне интересный и может быть с тем или иным успехом внедрен в реальную жизнь.
Немного изменив данный пример, я и пришел к той идее, о которой далее и пойдет речь.
Постановка задачи
Итак, представьте следующую картину:

Мы имеем в своем распоряжении пекарню, которая производит каждый день 6 (условно) тонн малиновых пирогов и каждый день распределяет данную продукцию по трем магазинам.
Однако как лучше это делать так, чтобы было как можно меньше просроченной продукции (при условии, что срок годности пирогов составляет три дня), если мы имеем только три грузовика с вместительностью в 1, 2 и 3 тонны соответственно, в каждую точку продажи наиболее выгодно отправлять только один грузовик (ибо они расположены друг от друга достаточно далеко) и притом только раз в сутки после выпечки пирогов, да к тому же мы не знаем покупательской способности в наших магазинах (так как бизнес только запустили)?
Условимся, что в магазинах отлично работает стратегия выкладки FIFO, при которой покупатели берут только тот товар, который был произведен позже остальных, однако если малиновый пирог не был куплен в течении трех дней, то персонал магазина избавляется от него.
Мы (условно) не знаем какой спрос на пироги в конкретный день в том или ином магазине будет, однако в нашей симуляции мы задаем его следующим образом для каждого из трех магазинов: 3 ± 0.1, 1 ± 0.1, 2 ± 0.1.
Очевидно, что самый выгодный для нас вариант — это отправлять в первый магазин три, во второй одну, а в третий две тонны пирогов соответственно.
Для решения данной задачи используем кастомную среду gym, а также Deep Q Learning (Keras имплементация).
Кастомная среда
Состояние среды будем описывать тремя действительными положительными числами — остатками продукции на текущий день в каждом из трех магазинов. Действия агента — это числа от 0 до 5 включительно, обозначающие индексы перестановки целых чисел 1, 2 и 3. Ясно, что наиболее выгодное действие будет под 4-ым индексом (3, 1, 2). Задачу рассматриваем как эпизодическую, в одном эпизоде 30 дней.
import gym
from gym import error, spaces, utils
from gym.utils import seeding
import itertools
import random
import time
class ShopsEnv(gym.Env):
metadata = {'render.modes': ['human']}
# конструктор класса, в котором происходит
# инициализация среды
def __init__(self):
self.state = [0, 0, 0] # текущее состояние
self.next_state = [0, 0, 0] # следующее состояние
self.done = False # флажок завершения эпизода
self.actions = list(itertools.permutations([1, 2, 3])) # массив возможных действий агента
self.reward = 0 # текущая награда за действие
self.time_tracker = 0 # трекер дня эпизода
self.remembered_states = [] # очередь из трех последних состояний
# для стохастичности среды
t = int( time.time() * 1000.0 )
random.seed( ((t & 0xff000000) >> 24) +
((t & 0x00ff0000) >> 8) +
((t & 0x0000ff00) << 8) +
((t & 0x000000ff) << 24) )
# метод позволяет агенту выполнить одно действие (шаг) в среде
def step(self, action_num):
# проверяем не завершен ли уже эпизод
if self.done:
return [self.state, self.reward, self.done, self.next_state]
else:
# выбираем следующее состояние текущим
self.state = self.next_state
# запоминаем состояние
self.remembered_states.append(self.state)
# инкрементируем трекер
self.time_tracker += 1
# выбираем действие в соответствии с полученным индексом
action = self.actions[action_num]
# обновляем состояние, используя выбранное действие (добавляем пироги)
self.next_state = [x + y for x, y in zip(action, self.state)]
# генерируем сколько будет куплено
self.next_state[0] -= (3 + random.uniform(-0.1, 0.1))
self.next_state[1] -= (1 + random.uniform(-0.1, 0.1))
self.next_state[2] -= (2 + random.uniform(-0.1, 0.1))
# вычисляем награду за действие
if any([x < 0 for x in self.next_state]):
self.reward = sum([x for x in self.next_state if x < 0])
else:
self.reward = 1
# если накопилась очередь из минимум трех состояний
# значит нужно убрать просроченные продукты
# при этом если ушли в минус (не хватило пирогов для покупателей),
# то также убираем данные отрицательные значения
if self.time_tracker >= 3:
remembered_state = self.remembered_states.pop(0)
self.next_state = [max(x - y, 0) for x, y in zip(self.next_state, remembered_state)]
else:
self.next_state = [max(x, 0) for x in self.next_state]
# проверяем прошло ли уже 30 дней
self.done = self.time_tracker == 30
# возвращаем результат шага агента в среде
return [self.state, self.reward, self.done, self.next_state]
# метод перезагрузки среды
def reset(self):
# устанавливаем все параметры в изначальное положение
self.state = [0, 0, 0]
self.next_state = [0, 0, 0]
self.done = False
self.reward = 0
self.time_tracker = 0
self.remembered_states = []
t = int( time.time() * 1000.0 )
random.seed( ((t & 0xff000000) >> 24) +
((t & 0x00ff0000) >> 8) +
((t & 0x0000ff00) << 8) +
((t & 0x000000ff) << 24) )
# возвращаем изначальное состояние
return self.state
# метод рендера текущего состояния среды:
# сколько и в каком магазине пирогов
def render(self, mode='human', close=False):
print('-'*20)
print('First shop')
print('Pies:', self.state[0])
print('Second shop')
print('Pies:', self.state[1])
print('Third shop')
print('Pies:', self.state[2])
print('-'*20)
print('')
Главные импорты
import numpy as np # линейная алгебра
import pandas as pd # препроцессинг данных
import gym # для сред
import gym_shops # для своей кастомной среды
from tqdm import tqdm # для прогресс бара
# для графиков
import matplotlib.pyplot as plt
import seaborn as sns
from IPython.display import clear_output
sns.set_color_codes()
# для моделирования
from collections import deque
from keras.models import Sequential
from keras.layers import Dense
from keras.optimizers import Adam
import random # для стохастичности среды
Определяем агента
class DQLAgent():
def __init__(self, env):
# определяем параметры и гиперпараметры
self.state_size = 3 # размер входа нейронной сети
self.action_size = 6 # размер выхода нейронной сети
# эта часть для replay()
self.gamma = 0.99
self.learning_rate = 0.01
# эта часть для adaptiveEGreedy()
self.epsilon = 0.99
self.epsilon_decay = 0.99
self.epsilon_min = 0.0001
self.memory = deque(maxlen = 5000) # дек с 5000 ячейками памяти, если он переполнится - удалятся первые ячейки
# собираем модель (NN)
self.model = self.build_model()
# метод сборки нейронной сети для Deep Q Learning
def build_model(self):
model = Sequential()
model.add(Dense(10, input_dim = self.state_size, activation = 'sigmoid')) # первый скрытый слой
model.add(Dense(50, activation = 'sigmoid')) # второй слой
model.add(Dense(10, activation = 'sigmoid')) # третий слой
model.add(Dense(self.action_size, activation = 'sigmoid')) # выходной слой
model.compile(loss = 'mse', optimizer = Adam(lr = self.learning_rate))
return model
# метод для запоминания состояния
def remember(self, state, action, reward, next_state, done):
self.memory.append((state, action, reward, next_state, done))
# метод выбора действия
def act(self, state):
# если случайное число от 0 до 1 меньше epsilon
# то выбираем действие случайно (exploration)
if random.uniform(0,1) <= self.epsilon:
return random.choice(range(6))
else:
# иначе нейронная сеть предсказывает следующее действие на основе текущего состояния
act_values = self.model.predict(state)
return np.argmax(act_values[0])
# метод для тренировки нейронной сети
def replay(self, batch_size):
# выходим из метода, если еще на накопили достаточно опыта в памяти
if len(self.memory) < batch_size:
return
minibatch = random.sample(self.memory, batch_size) # берем batch_size примеров рандомно из памяти
# обучаемся на каждой записи батча
for state, action, reward, next_state, done in minibatch:
if done: # если эпизод закончен - тогда у нас есть только награда
target = reward
else:
# иначе таргет формируем с помощью следующего состояния
target = reward + self.gamma * np.amax(self.model.predict(next_state)[0])
# target = R(s,a) + gamma * max Q`(s`,a`)
# target (max Q` value) это выход из нейронной сети, которая принимает s` на вход
train_target = self.model.predict(state) # s --> NN --> Q(s,a) = train_target
train_target[0][action] = target
self.model.fit(state, train_target, verbose = 0)
# метод для уменьшения exploration rate,
# то есть epsilon
def adaptiveEGreedy(self):
if self.epsilon > self.epsilon_min:
self.epsilon *= self.epsilon_decay
Тренируем агента
# инициализация gym среды и агента
env = gym.make('shops-v0')
agent = DQLAgent(env)
# устанавливаем параметры тренировки
batch_size = 100
episodes = 1000
# начинаем тренировку
progress_bar = tqdm(range(episodes), position=0, leave=True)
for e in progress_bar:
# инициализируем среду
state = env.reset()
state = np.reshape(state, [1, 3])
# запоминаем текущий день симуляции, id выбранных действий и сумму наград за эпизод
time = 0
taken_actions = []
sum_rewards = 0
# симулируем эпизод среды
while True:
# выбираем действие
action = agent.act(state)
# запоминаем действие
taken_actions.append(action)
# выполняем шаг агентом в среде
next_state, reward, done, _ = env.step(action)
next_state = np.reshape(next_state, [1, 3])
# добавляем полученную награду к остальным
sum_rewards += reward
# запоминаем результат шага
agent.remember(state, action, reward, next_state, done)
# переходим к следующему состоянию
state = next_state
# выполняем replay
agent.replay(batch_size)
# обновляем epsilon
agent.adaptiveEGreedy()
# инкрементируем счетчик времени
time += 1
# выводим прогресс тренировки
progress_bar.set_postfix_str(s='mean reward: {}, time: {}, epsilon: {}'.format(round(sum_rewards/time, 3), time, round(agent.epsilon, 3)), refresh=True)
# проверяем не завершился ли эпизод
if done:
# выводим распределение выбранных действий в течении эпизода
clear_output(wait=True)
sns.distplot(taken_actions, color="y")
plt.title('Episode: ' + str(e))
plt.xlabel('Action number')
plt.ylabel('Occurrence in %')
plt.show()
break

Тестируем агента
import time
trained_model = agent # теперь мы имеем натренированного агента
state = env.reset() # перезапускаем среду
state = np.reshape(state, [1,3])
# следим за основными параметрами в течении тестового эпизода
time_t = 0
MAX_EPISOD_LENGTH = 1000 # для прогресс бара
taken_actions = []
mean_reward = 0
# симулируем тестовый эпизод
progress_bar = tqdm(range(MAX_EPISOD_LENGTH), position=0, leave=True)
for time_t in progress_bar:
# выполняем шаг агентом в среде
action = trained_model.act(state)
next_state, reward, done, _ = env.step(action)
next_state = np.reshape(next_state, [1,3])
state = next_state
taken_actions.append(action)
# выводим результат шага
clear_output(wait=True)
env.render()
progress_bar.set_postfix_str(s='time: {}'.format(time_t), refresh=True)
print('Reward:', round(env.reward, 3))
time.sleep(0.5)
mean_reward += env.reward
if done:
break
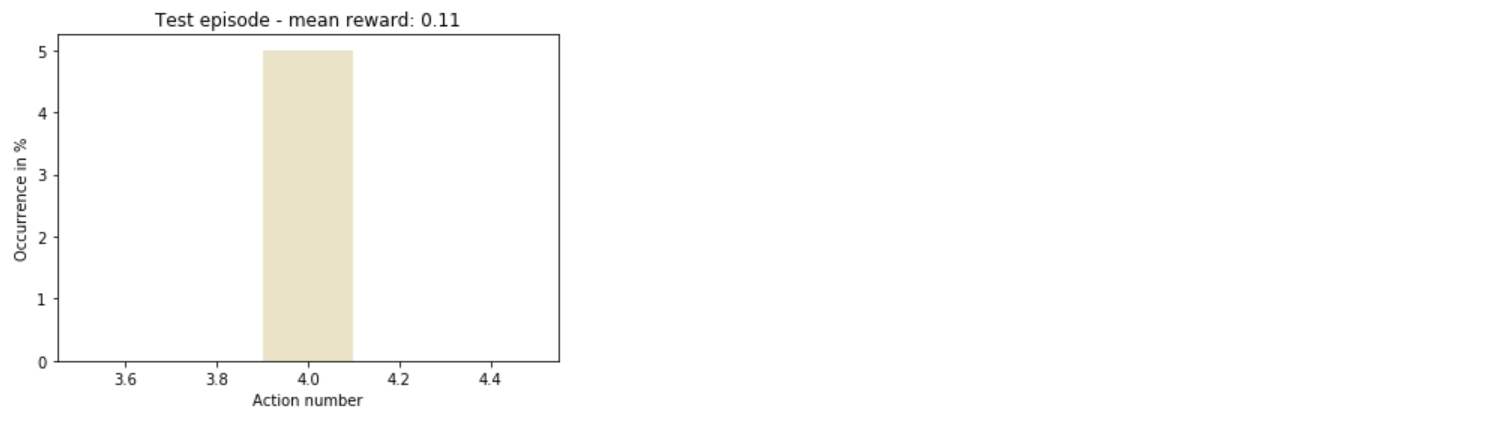
# выводим распределение выбранных действий
sns.distplot(taken_actions, color='y')
plt.title('Test episode - mean reward: ' + str(round(mean_reward/(time_t+1), 3)))
plt.xlabel('Action number')
plt.ylabel('Occurrence in %')
plt.show()
Итого
Таким образом, достаточно быстро агент понял, как наиболее выгодно действовать.
В целом, остается еще много места для экспериментов: можно увеличить количество магазинов, разнообразить действия, да хоть просто изменить гиперпараметры модели обучения — и это только начало списка.

cry_san
Не лучше ли было не высасывать данные из пальца, а не полениться и сходить в реальную пекарню. И там узнать данные о поставке товара в магазины. Конечно с условием, что вы им бесплатно выкатите готовую работу.
Да, есть всякие ньюансы, не все захотят делиться данными. Но вопрос решаем.
Все же лучше учиться на реальных данных.