
«Это мой лучший друг: всегда в хорошем настроении и не задаёт лишних вопросов» — Леон о растении.

Не секрет, что зеленые друзья расползлись по подоконникам многих из нас, вот и мне захотелось вырастить у себя что-нибудь. Да не просто «что-нибудь», а что-нибудь плодоносящее. К сожалению, в квартирных условиях обеспечить необходимые для этого условия весьма непросто. Однако попытаться стоит. Так, и взбрела мне в голову мысль разработки устройства для решения этой задачи — умного гроубокса. Конечно, идея не нова, но найти что-нибудь интересное, да еще и настольного формата среди готовой продукции мне не удалось и захотелось соорудить кое-что своё. Дело дошло до версии 2.0 и вот, я готов поделиться полученными результатами.
Вначале был прототип
Для проверки целесообразности идеи выращивания плодоносящих растений в закрытом пространстве я решил собрать основной функционал, пренебрегая аккуратностью корпусирования. Прототип состоял из следующих функциональных блоков:
[ функциональная схема устройства (версия 1.0) ]
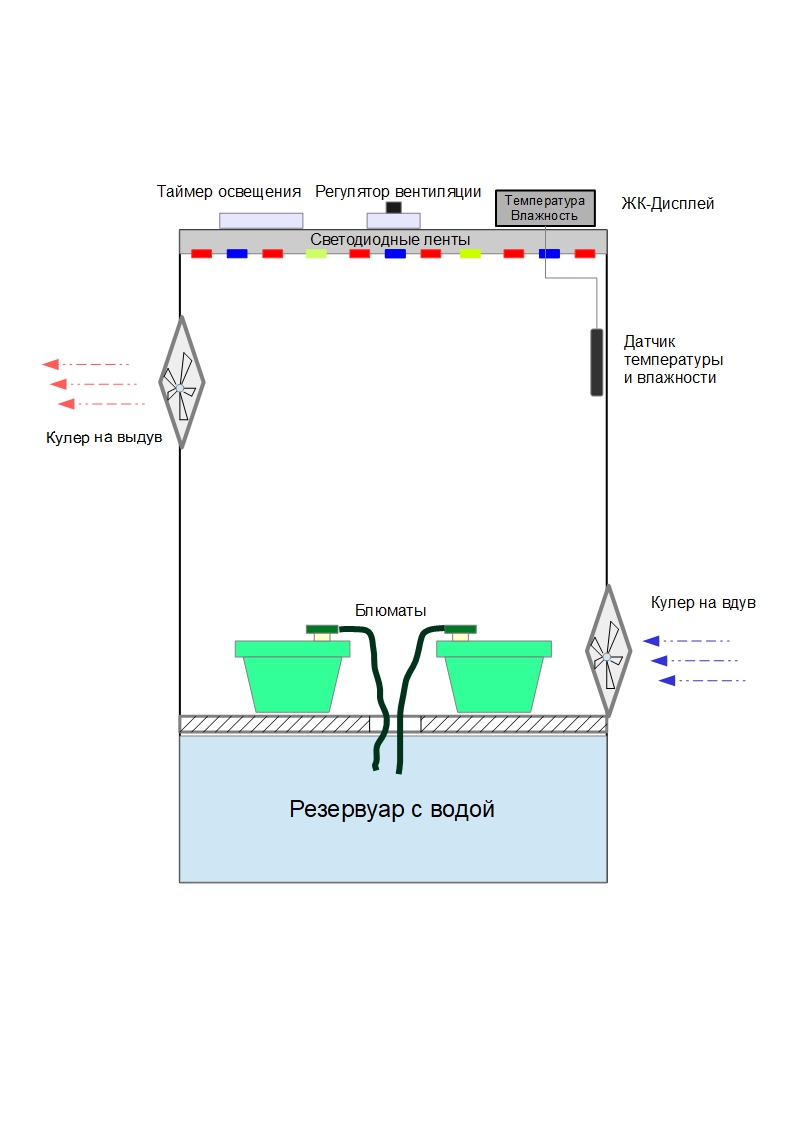
Получилась весьма увесистая конструкция, внушительных размеров, тем не менее, работающая и пригодная для эксплуатации. В качестве корпуса использовался вырезанный деревянный бокс, напичканный бюджетной электроникой:
для освещения были выбраны светодиодные ленты красно-синего и тепло-белого спектров свечения; для вентиляции — стандартные 12 В кулеры; потенциометр – как регулятор скорости оборотов кулеров с возможностью отключения; датчик температуры и влажности с выводом на ЖК-дисплей; розетка с таймером на освещение и сетевой блок питания. Открытием стала система капельного автополива Blumat. Под спойлером фото первой версии гроубокса. Основная цель заключалась в получении плодов какого-либо сорта.

[ внешний вид гроубокса 1.0 ]
Собрав этого Франкенштейна, я отправил острых перцев с боевым названием “Огонёк” на разведку. Было интересно понаблюдать за полным циклом роста растений поэтому в начале марта я высаживал их семена, накрывая почву пленкой на несколько дней. Режимы освещения были следующими: во время роста световой день длился 18 часов, а во время цветения — 12. Примерно через три месяца я увидел первые цветочки. Опылять пришлось искусственно (кисточкой) из-за того, что завязи сами никак не образовывались. В итоге они успешно отцвели два раза за полгода – в начале лета и осенью.

[ цветение перцев и первый урожай ]
Как можно заметить, система контролировалась в полуручном режиме, ни о какой автоматизации и сборе статистики речи и не шло. Однако, на мой взгляд, идея доказала свою работоспособность, и я стал готовиться ко второй версии.
Версия 2.0
При разработке второй версии я первым делом взялся за аппаратно-программную составляющую, предполагая, что именно с ней будет больше всего проблем, и оставил вопрос корпусирования на потом. Забегая вперед, скажу: все оказалось ровно наоборот.
Про электронику
Функциональная схема, по сравнению с первой версией, претерпела несколько важных изменений: добавился датчик жидкости, а контроль и управление системой было решено перенести на WEB-интерфейс. В остальном, функционал сохранился, однако реализация существенно поменялась. Так, работа над новой версией началась с выбора электронных компонентов. Архитектура новой электронной начинки приведена на рисунке ниже. Блок питания на 48 В выбран из расчета применения цепей 3 Вт светодиодов.

[ структурно-функциональная схема электроники (версия 2.0) ]
Хост-плата
Для связи с внешним миром новый гроубокс имеет встроенный WEB-сервер. Честно говоря, до данного проекта я не имел никакого опыта разработки пользовательских интерфейсов (UI), но такой подход мне показался целесообразным из-за возможности отображения интерфейса как локально (браузером на дисплее), так и удаленно (в браузере подключенных устройств), ничего при этом не переписывая. Таким образом, на UI были возложены две группы задач:
Управление:
- настройками хост-платы;
- освещением;
- вентиляцией.
Мониторинг:
- состояния освещения (вкл\выкл);
- температуры и влажности;
- уровня воды (есть\нет);
- состояния вентиляции.
WEB-сервер располагается на хост-плате (см. структурно-функциональную схему), которая, в свою очередь, осуществляет обмен данными с остальными компонентами системы.
Признаюсь, в качестве первой реализации я взял разработанную ранее платформу CNCU-01 на базе микроконтроллера STM32F407, где, подняв WEB-сервер, я уткнулся в проблему недостатка памяти для хранения картинок и html-страниц. Возможно, в целях энергоэффективности я вернусь к этому варианту, т.к. данные можно хранить на microSD карте, но пока я решил взять платформу на базе микропроцессора с Linux. Выбор пал на Khadas VIM1, как на плату с лучшим, по моему мнению, соотношением функционала и стоимости. Основными критериями выбора были:
- работа с известными дистрибутивами (Ubuntu \ Debian \ Armbian);
- наличие eMMC для хранения образа ОС и данных;
- наличие отдельного разъема (помимо USB) для питания;
- нормальная работа при пассивном охлаждении;
- наличие UART, I2C, WiFi, ETH, HDMI, USB(900mA), GPIO.
Также преимуществом данного одноплатного компьютера было наличие широкого выбора уже собранных образов разных дистрибутивов Linux. В этом проекте я использовал Ubuntu LTS 18.04. Большинство необходимого уже было в составе образа, оставалось лишь все это настроить и запрограммировать. Первым делом потребовалось сконфигурировать шину I2C. По умолчанию частота SCK, выставленная производителем в 400 кГц, не подходила для моей длины линии (~5м) – фронты тактовых сигналов оказывались заваленными из-за паразитной емкости провода и корректный обмен данными был невозможен. Выход был в понижении частоты до 100 кГц исправлением файла конфигурации платы – devicetreeblob (.dtb). Отдельно хочется отметить живой форум и тех. поддержку Khadas, оперативно реагирующую на возникающие вопросы.
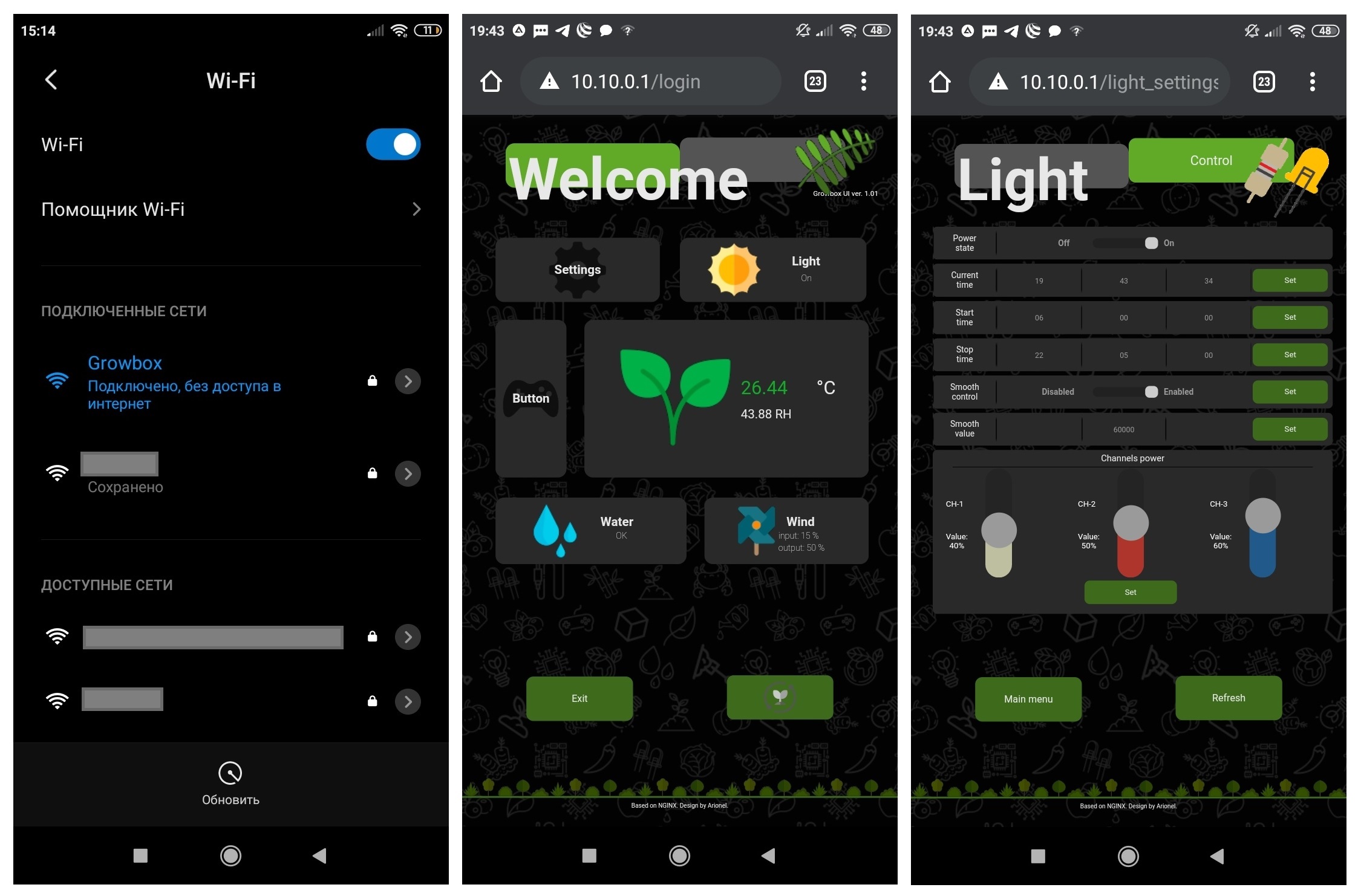
Для реализации WEB-интерфейса мне понадобилось знакомство с HTML, CSS и JS. Усложнять их изучение постижением популярных фреймворков я не стал (да и времени на это не было), поэтому фронтенд получился пусть и уродливым внутри, зато, как по мне, миловидным снаружи (благо, с дизайном мне очень помогла девушка). Бэкенд представляет из себя связку NGINX WEB-сервера, FastCGI и С++ приложения. На момент написания статьи пользовательский интерфейс выглядит следующим образом:
[ WEB-интерфейс гроубокса 2.0 ]
Рабочие настройки и показания датчиков хранятся в sqlite базе данных. Визуализация температуры и влажности реализована при помощи модифицированной библиотеки Chart.js (мне потребовалась поддержка двух Y-осей). Режимы освещения и вентиляции задаются расписаниями — каждому устройству соответствует свой таймер и статическое значение рабочей мощности. Более хитрые алгоритмы автоматического управления пока находятся в разработке.
WiFi vs HDMI
Как говорилось ранее, гроубокс 2.0 задумывался как сетевое устройство: для регистрации в сети он поддерживает как статическое присваивание IP адреса, так и динамическое, но прежде, чем получить доступ к его WEB-серверу (UI), необходимо собственно этот адрес определить. Так, для пользователя стал необходим интерфейс для первоначальной настройки устройства, чтобы затем вывести его в локальную сеть. Кроме того, такой интерфейс пригодился бы для работы в оффлайн режиме.
Изначально для решения этой задачи я планировал использовать HDMI TouchScreen дисплей. UI отображался бы на дисплее через chromium в режиме киоска и управлялся бы при помощи виртуальной клавиатуры. Но все оказалось не так просто — сенсорная панель по умолчанию не поддерживалась в предлагаемых на сайте Khadas образах Ubuntu Desktop, однако, за пару дней общения на форуме, разработчики и сообщество помогли мне собрать новый образ с необходимыми модулями и тач заработал. Для реализации виртуальной клавиатуры в Ubuntu нашлось предостаточно готовых средств, среди которых я выбирал между florence и onboard. Данные клавиатуры позволяют гибко менять свой внешний вид, что дает возможность качественно настроить их под свое приложение.
Прим. Недавно разработчики Khadas опубликовали версию Ubuntu Desktop с поддержкой Gnome, где есть уже встроенная весьма удобная виртуальная клавиатура.

Тем не менее, несмотря на проделанную работу, все это мне не пригодилось. Очевидной проблемой при работе с дисплеем было повышенное энергопотребление хост-платы и больший ее нагрев из-за работы графического процессора. Без активного охлаждения с дисплеем работать все же не рекомендуется, а мне очень хотелось избежать лишних шумов кулера. Конец моим сомнениям пришел, как мне кажется, в виде знака. Дело в том, что пока я работал с одноплатным компьютером без дисплея, он был запитан от блока питания 48 В через 48VDC-5VDC преобразователь. Я подозревал, что такое сочетание падения напряжения и тока потребления платы близки к максимальным возможностям преобразователя, но забыл об этом, когда стал подключать дисплей. Стоит уточнить, что дисплей запитывается от USB порта хост-платы. Таким образом, увлеченный кастомизацией виртуальной клавиатуры, вскоре я почуял характерный запах горелого пластика и экран отключился. Отключился, как оказалось, навсегда. DC-DC Преобразователь сгорел, успев, по видимости, выдать аномальный импульс на выход, убивший кулер хост-платы и матрицу дисплея. Одноплатный компьютер сначала тоже пал замертво и находился в коме минут 20, после чего входной самовосстанавливающийся предохранитель оправдал свое название, и плата ожила, чему я был несказанно рад. К несчастью, лишнего дисплея у меня не было, и произошедшее я воспринял как знак для пересмотра выбранного решения. Обнаружив, что большинство людей уже давно носит
[ подключение смартфона к гроубоксу 2.0 ]
Фитосветильник и контроллер FLC-01
Избрав путь разработки «почти с нуля», я захотел поэкспериментировать с системой освещения, а в частности с излучаемым спектром. Так началась работа над светодиодным фито-светильником и контроллером для него.
Размеры освещаемой площади в этой версии стали 400 х 400 мм, поэтому в качестве корпуса фитосветильника я выбрал алюминиевый радиатор 300 х 400, с запасом, чтобы распределить светодиоды как можно свободнее. Радиатор крепится к конструкционному профилю и выполняет функцию верхней крышки бокса. На китайском рынке я нашел готовые алюминиевые панели для светодиодов подходящий габаритов. Их я закрепил на радиаторе, предварительно промазанном термопастой, и запаял светодиоды по схеме. Из расчета 250 реально излучаемых Вт на 1 облучаемый м2 (или 40 Вт / 0,16 м2 – в моем случае) я взял 41 трехваттный светодиод. Стоит уточнить, что я использовал 3 независимые группы светодиодов (красные 660 нм, синие 445 нм и белые 2900К/4000К), в которых падение напряжения на отдельном светодиоде отличается. Так, например, на синем светодиоде падает в районе 3,4 В, тогда как на красном — 2,4 В. Кроме того, насиловать светодиоды номинальным током в 700 мА я не стал и выбрал 350 мА в качестве рабочего значения (чтобы продлить им жизнь) при максимуме в 500 мА (максимум драйвера). По измерениям пришедших ко мне светодиодов получилась следующая таблица:
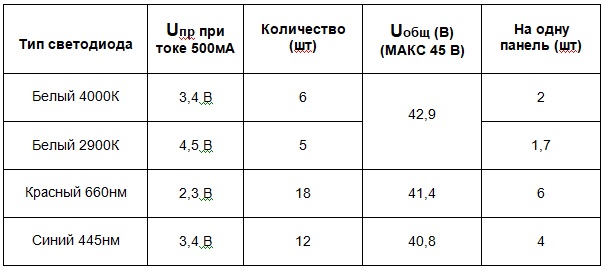
Исходя из вышесказанного, считаю максимальную реальную полученную мощность фитосветильника:
Pmax = 6 ? (0,5 ? 3,4) + 5 ? (0,5 ? 4,5) + 12 ? (0,5 ? 3,4) + 18 ? (0,5 ? 2,4) = 63,45 [Вт]
и реальную рабочую мощность при токе 350 мА:
Pраб = 6 ? (0,35 ? 3,4) + 5 ? (0,35 ? 4,5) + 12 ? (0,35 ? 3,4) + 18 ? (0,35 ? 2,4) = 44,42 [Вт]
При этом каждой линии светодиодов (красной, синей и белой) хватает 45 В для питания (3 В падает на драйвере для светодиодов, согласно документации), так что блока питания на 48 В 4.4 А как раз достаточно. Распределяя светодиоды, я старался обеспечить максимальную однородность излучаемого света. Получившееся в итоге представлено на фото ниже.
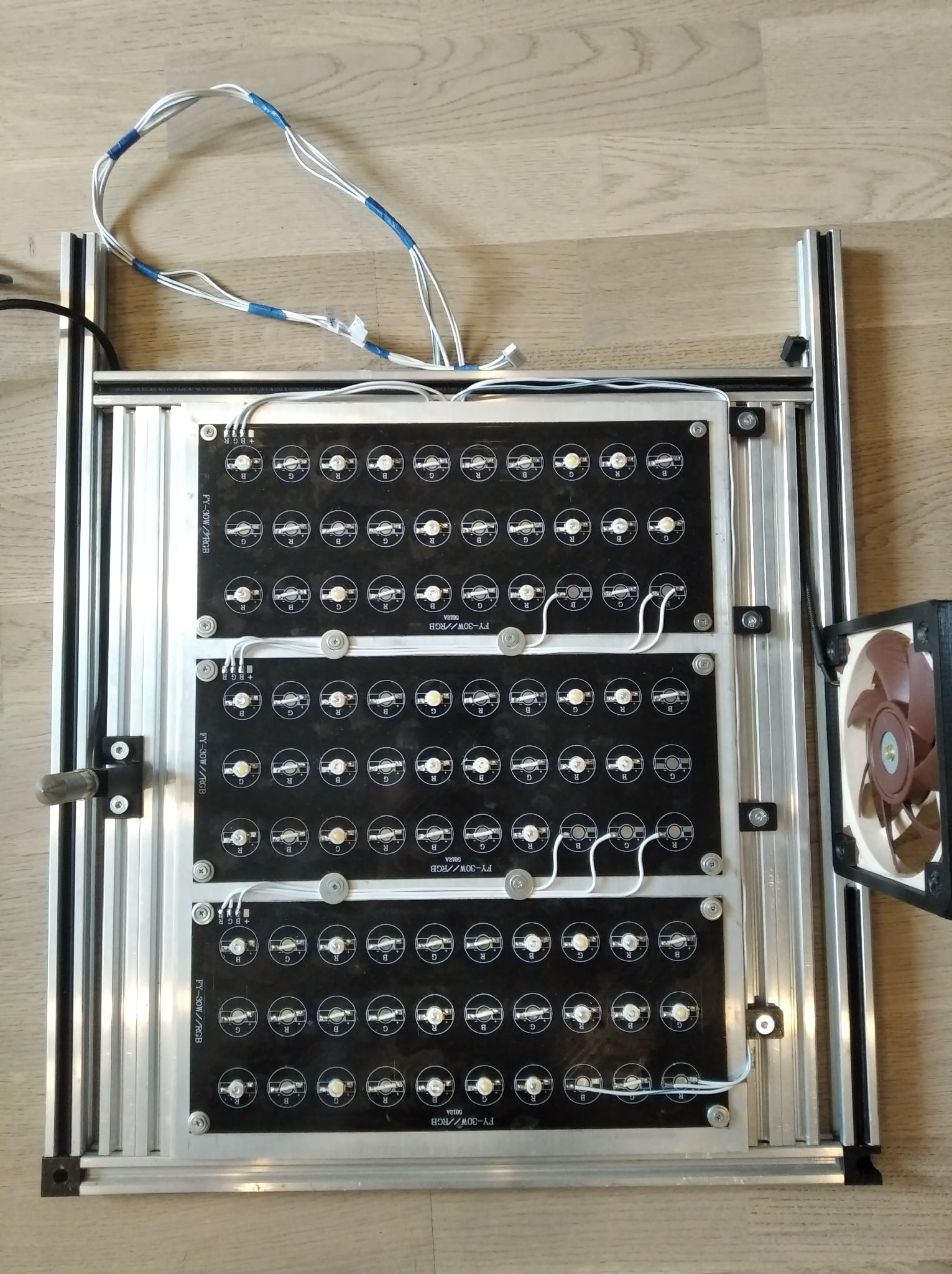
[ схема распределения светодиодов] [ вмонтированная в крышку лампа ]
Благодаря тому, что фито-светильник имеет независимые линии светодиодов разных спектров, имеется возможность изменять яркость каждой группы, тем самым управляя общим спектром излучения. Более того, при необходимости можно плавно уменьшать или увеличивать общую мощность относительно рабочей. Такой подход позволяет гибко настраивать свет под выращиваемую культуру растения и имитировать солнечные рассветы и закаты.
Для такого управления светодиодами понадобился специальный контроллер с трехканальным диммируемым светодиодным драйвером, да еще и с цифровым каналом связи. Собрать его я решил сам, не найдя ничего подходящего на рынке. В качестве драйверов для светодиодов были найден источники питания серии LDD-H, а именно LDD-500H на 500 мА. Конструкция платы разработанного контроллера позволяет установить любой необходимый драйвер этой серии, т.к. они имеют одинаковые корпуса и для них предусмотрены специальные посадочные места типа «кроватка». Таким образом, при желании можно еще повысить мощность фито-светильника, заменив драйверы на LDD-700H с током 700 мА. Мозгом же платы был выбран популярный микроконтроллер STM32F103. Именно он управляет светодиодными драйверами посредством ШИМ-сигналов, устанавливая тем самым выходной ток. Для связи контроллера с внешним миром поддерживается несколько каналов связи: UART, RS232 и Bluetooth 4.0 BLE(в зависимости от сферы применения).Bluetooth канал построен на основе модуля HM-10.Также контроллер имеет встроенный таймер включения и отключения драйверов светодиодов для установки длительности светового дня растений. Чтобы таймер не сбивался при перепадах напряжения питания, он работает на основе часов реального времени (RTC) и на плате установлен разъем под батарейку CR2032 для резервирования питания часов. Сама же плата питается в диапазоне 15…50 В, подавая входное напряжение в том числе и на светодиодные драйверы. В процессе эксплуатации от 48 В я столкнулся со значительным нагревом линейного стабилизатора напряжения LM317HVT и не стал дожидаться его выхода из строя, сделав отдельный вывод для питания логической части от DC-DC преобразователя на базе LM2596HV. В следующей ревизии платы планируется исправить данный недочет.

[ плата FLC-01: вид сверху ] [ плата FLC-01: вид снизу ]
Разработанная для контроллера прошивка позволяет регулировать выходной ток каждого драйвера в пределах от 0 до 100% с шагом 1%, то есть для рабочего значения в 350 мА необходимо выставить 70% (500?0.7). Протокол общения максимально прост (есть общая структура текущего состояния контроллера, нужно что-то поменять — пишешь ему об этом), и построен на формате JSON:
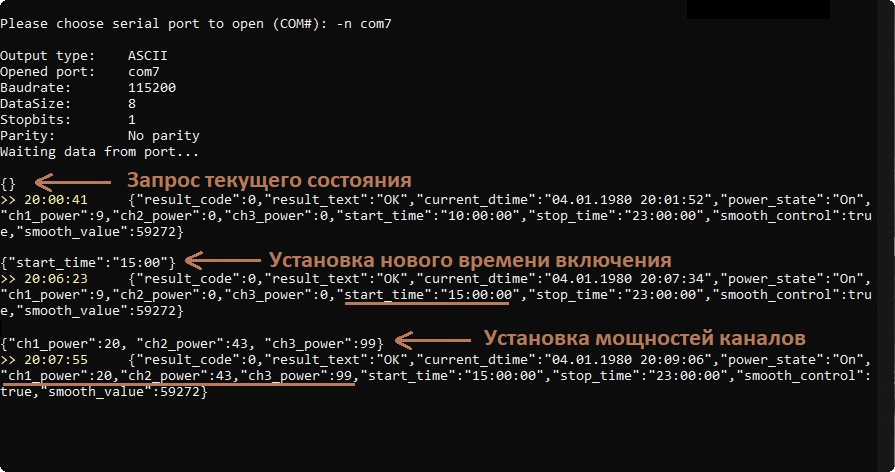
[ пример обмена данными ]
и даже имеет простенький GUI на Python3, если вдруг понадобится подключать контроллер к ПК.

[ графический интерфейс FLC-01 ]
Для управления по Bluetooth я использую Serial Bluetooth Terminal. Это оказалось не очень удобным в использовании (отдельное приложение все же предпочтительнее, однако его еще нет), но очень удобным при отладке, когда плата уже встроена, а подключиться и посмотреть происходящее надо. Для связи с хост-платой используется классический UART.
Соединительная плата (SensorsBoard)
Ни для кого не секрет, что у разных датчиков разные интерфейсы связи. Для своей системы я выбрал следующие сенсоры:
- датчик температуры и влажности SHT30 – питание 3.3 В, работает по I2C;
- бесконтактный датчик жидкости XKC-Y26-V – питание 12 В, подает на выход уровень питания если жидкость есть и GND – в противном случае;
- 4-pin кулеры Noctua NF-A12x15 – питание 12 В, скорость вращения регулируется ШИМ-сигналом.
Как видно из этого перечня, напрямую к хост-плате Khadas VIM1 можно подключить разве что датчик температуры-влажности т.к. кроме 3.3 В и 5 В на хост-плате напряжений нет. Для подключения датчика жидкости и вовсе нужен преобразователь 12 — 3.3 В чтобы подать сигнал на порт процессора. В связи с этим, потребовалось сделать еще одну плату для стыковки датчиков и кулеров с одноплатным компьютером. В качестве канала связи я использовал шину I2C, где ведущим устройством выступила хост-плата, а двумя ведомыми стали датчик SHT30 и мозг соединительной платы – уже известный микроконтроллер STM32F103. На этот раз задачей микроконтроллера стала генерация ШИМ-сигналов частотой 25 кГц для двух кулеров, скважность которых задается командами по I2C. Плату собрал дешево и сердито — на макетке, используя STM32-Bluepill. Питание осуществляется от общего блока питания 48 В поэтому на входе используется DC-DC преобразователь LM2596HV-ADJ на 12 В.
Не обошлось и без подводных камней даже в столь простой схеме. Когда я рассчитывал делитель напряжения 12 — 3.3 В я не учел один неочевидный момент — на выходе датчика жидкости уже был встроен токоограничивающий резистор. Этот резистор становился плечом моего делителя и значительно влиял на выходное напряжение. При помощи мультиметра я определил его номинал (20 кОм) и внес коррективы в схему. Выход данного делителя подается на входной порт хост-платы, поэтому для надежности я добавил стабилитрон на 3.3 В, который на схеме не показан.
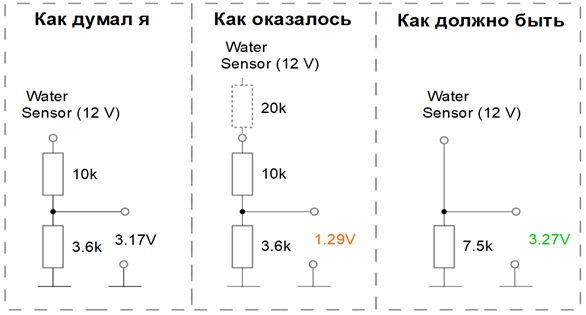
[ схема подключения датчика жидкости ]
Про корпус
На этот раз я дал себе установку на максимальную повторяемость конечного изделия, стараясь минимизировать объемы
Каркас было решено собирать из конструкционного алюминиевого профиля серии 20 с V-пазом. Работать с ним оказалось крайне приятно – все размеры подобраны, крепления аккуратно закручиваются и сходятся с пазами. Главное было заранее определиться с габаритами и набором необходимого крепежа. Так, проектирование корпуса началось с 3D-моделирования.Честно говоря, сперва я думал, что модель ограничится лишь каркасом и понадобится лишь для определения основных размеров и типов соединителей, но по мере проектирования стали проявляться неочевидные нюансы, о которых просто не задумываешься без картинки перед глазами. В итоге я стал моделировать каждую деталь и соединение, что помогло избежать многих ошибок в дальнейшем. В этом проекте я познакомился с Autodesk Inventor 2020 и остался очень доволен этой системой автоматизированного проектирования. В ней детали легко рисуются по эскизам, а затем объединяются в единую сборку модели. Кроме того, без лишних манипуляций я сразу мог подготовить нужную деталь для печати на 3D-принтере. Рабочая модель представлена на изображении ниже:
[ 3D-модель корпуса версии 2.0 ]
Внешние габариты конструкции: 440 Ш х 503 В х 540 Г[мм]
Пространство для растений: 400 Ш х 370 В х 400 Г [мм]
В качестве стенок используется прозрачное оргстекло. Чтобы излучаемый фито-лампой свет не выбивался наружу, оргстекло обклеено полузеркальной пленкой (коэффициент отражения 92%, пропускания 8%). Таким образом, становится возможным наблюдение за растениями при наличии света внутри бокса, а при отсутствии внутреннего освещения – бокс превращается в зеркальный.
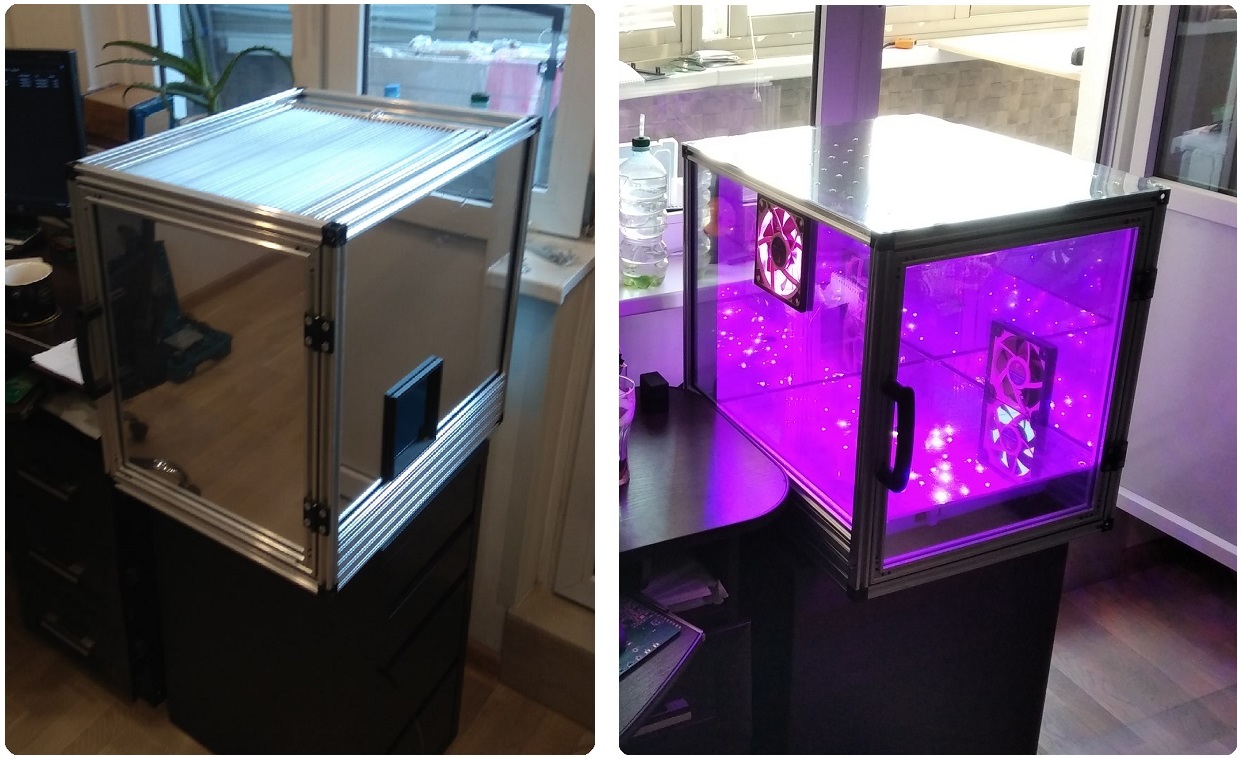
[ эффект полупрозрачных стенок ]

Подача воды производится в подпольный бак объемом 10 л по выведенной нейлоновой трубке. Имея внешний диаметр 7 мм, она плотно втиснута в паз алюминиевого профиля. Горлышко трубки пролезает через соединительный куб и выглядывает из края верхней крышки корпуса. Для удобства пополнения бака я напечатал своеобразную воронку под диаметр отверстия трубки.
К сожалению, мне не удалось найти подходящий сенсор уровня жидкости — для ультразвуковых не хватает высоты, а для поплавковых пришлось бы резать бак. Поэтому специально обученный бесконтактный датчик показывает сам факт наличия или отсутствия воды, а уровень можно косвенно определить по столбцу жидкости в прозрачной трубке, ведь в силу вступают законы сообщающихся сосудов.
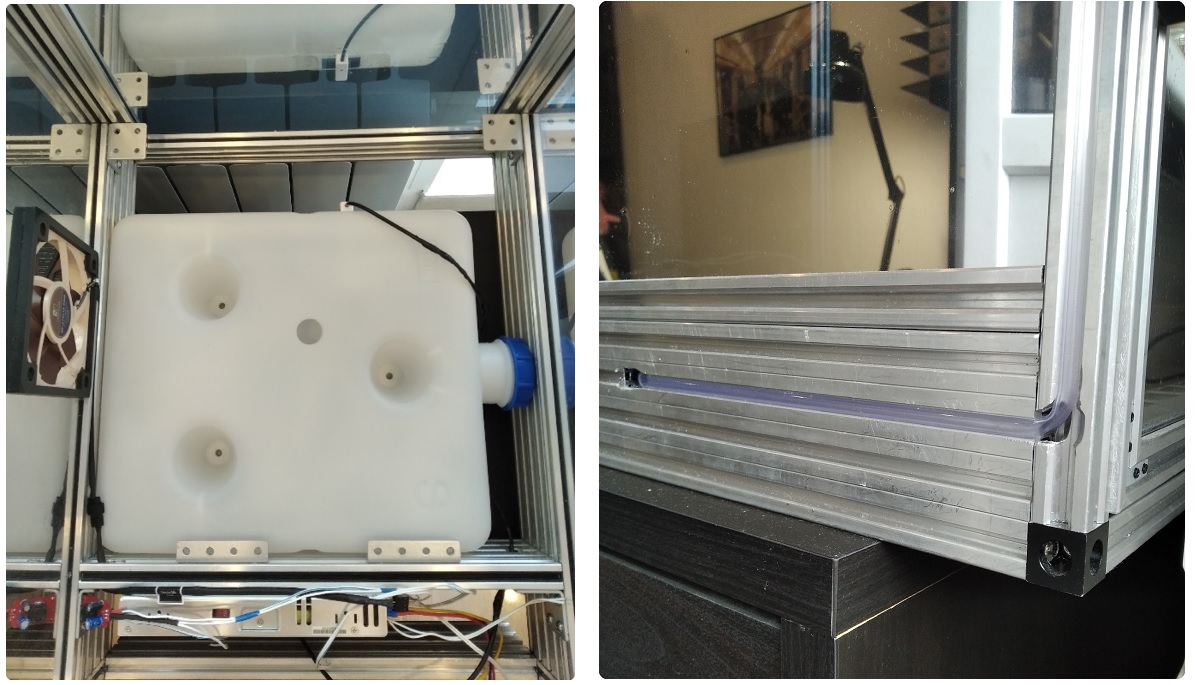
[ система подачи воды ]
Немаловажной характеристикой гроубокса 2.0 для меня была громкость работы. Как известно, вентиляторы и блоки питания с активным охлаждением могут издавать раздражающее жужжание. Пытаясь максимально этого избежать, я поставил кулеры Noctua с адаптером Low Noise и блок питания с пассивным охлаждением, что обеспечило нужный эффект бесшумной работы.
Для закрепления плат на задней стенке я напечатал на 3D-принтере специальные крепления, которые приклеиваются к оргстеклу и имеют монтажные стойки под винтики. Таким образом, электроника за исключением датчиков расположилась в задней части корпуса (все провода брались с запасом поэтому вышло не так красиво, как хотелось бы):

[ расположение электроники на задней стенке ]
И напоследок небольшой демо-ролик получившегося устройства:
Итоги
Чем дальше проект развивается, тем интереснее он становится. Новые ответы порождают новые вопросы. У текущей версии все еще немало недостатков и особенностей, требующих доработок. Диапазон решаемых задач растет и, по понятным причинам, все сложнее удается с ним справляться в одиночку. Не знаю как далеко я зайду, но эксперименты продолжаются и надеюсь принесут плоды.
P.S. Высадил подопытную зелень в начале сентября — взошла за две недели. Продолжаю наблюдения. Всем хорошего урожая!

drWhy
Отличная работа. Грибы, кстати, отлично растут на жмыхе кофе — можно грабить айтишные компании, а взамен поставлять им свежие грибочки с салатиком.
GeMir
Судя по тому же инстаграму, как минимум половина домашних пользователей LED grow light выращивает то самое растение.
drWhy
Лидер по соотношению получаемого позитива на ватт потраченной энергии.
Хотя свежий круглогодично салат употреблять тоже очень полезно.
Alexufo
Из грибов вырастить можно только шампиньоны. Псилоцибинчик извольте искать сами, с рисками напорототься на смертельно ядовитые похожие.)
Sha644
Устричный гриб почти все виды растут отлично.
ctacka
Я вас умоляю, прекрасно кубенсисы разводятся в неволе.
Alexufo
не спешиалист, извините) Но тру психонавт обязательно должен насладиться поиском.
На самом деле очень интересно, что столь древние организмы имеют в своем составе то что влияет на мозг гараздо более позднего вида, и на шкале существования грибы даже нас еще не подозревают. Видимо, это говорит о какой-то биологической связи определенных структур обработки информации.
ctacka
Во-первых, я не уверен, что псилоцибиновые грибы прямо такие древние. Они же тоже эволюционируют, и вполне возможно, что вещество в них появилось не очень давно.
Во-вторых, возраст мышьяка сравним с возрастом вселенной, а действует до сих пор прекрасно.
Alexufo
мышьяк можно заменить любым элементом из таблицы менделеева. Это же константа формы вещества. Конечно на нас все действует из таблицы Менделеева так или иначе. С точки зрения эволюции грибов, они нас на столько СТАРШЕ, что боюсь они эволюционировали задолго до нас.
Но псилоцибин оказывает действие на нервную систему, причем самую сложную из известных. И действует на восприятие и интерпретации сигналов органов чувств. Смещает эволюционновымеренный химический баланс мозга, не вырубает, не отравляет, а именно удачно подмешивается.
ra3vdx
«Так получилось»
И в этом нет никакого антропоцентризма. Видимо, чтобы животные поменьше истребляли — для них галлюцинации — сильнейший стресс. Или просто так сложились биохимические пути метаболизма грибов. Ведь они, по сути, такие «недоживотные» — клеточная оболочка у них из хитина.
Да, грибы сильно старше и человека и всех тетрапод вообще — современный вид они приобрели лет 250 млн. назад.
Ernest88
Вряд ли этот механизм для защиты. Бывалые говорят что эти грибы любят расти рядом с человеком, в глуши их не нейдешь.
dydyman
Не просто рядом с человеком, а на лугах, где пасутся коровы или лошади. Скорее всего близость к человеку просто следствие того, что споры распространяются данными животными.
Mogwaika
А навоз помогает?
dydyman
Они могут расти прямо из навоза. Можно предположить что таким образом они и заселили территории, окружающие человеческие поселения.
ra3vdx
Бизоны, туры, антилопы, лоси и прочие парнокопытные как-то не шибко близко к людям живут. Да и КРС, как категорию, одомашнили довольно недавно — в раннем неолите. Кроме того, галлюциногенные грибы употребляют шаманы (впрочем, не только они) на Таймыре и Чукотке. Я не говорю о майя и ацтеках. Там откуда коровы и лошади?
А споры ветром распространяются.
dydyman
Кстати об ацтеках. Вот почитайте в каких отношениях с животными находятся их подобные грибы.
ra3vdx
На самом деле, нет. Передайте «бывалым, что грибы растут там, где гля этого есть подходящие климатические условия и где есть растение-симбионт, с которым можно сформировать микоризу.
А их биохимические пути — ещё раз — сформировались за сотни миллионов лет до возникновения человека, как вида.
»Бывалые" страдают антропоцентризмом.
Erop22
Антревольт же. То, что что-то взаимодействует с чем-то, совсем не значит, что это взаимодействие не случайно. Апофения такая апофения…
У Вишневского немного об этом есть. В целом, грибы шибко старше людей, чтобы могли появиться какие- то эволюционные взаимодействия.
p.s. Вишневский вообще отличный рассказчик. Если еще не знакомы с его лекциями — рекомендую!
Alexufo
Товарища с 6-тью детьми сложно не заметить.
sim2q
Alexufo
sim2q
ps это про semilanceata а не все вот эти вот новомодные выше в комментах)
cyberly
Ну, плесень-то точно отлично на нем растет. Достала…
Ig_B
Белые светодиоды с падением 4.5в это sunlike? Где брали?
ClownMik Автор
Светодиоды брал вот здесь. Для белых светодиодов заявленные характеристики не совсем совпадают с теми, что я намерил. Не sunlike, но их думаю тоже как-нибудь опробовать.
Energidin
А какие именно характеристики мерили?
ClownMik Автор
Падение напряжения на светодиоде
Ig_B
У них написано, падение 3.3в.
ClownMik Автор
а в жизни больше ( таблица в статье )
staticmain
Вы молодец! За bluepill и Noctua +100 баллов!
GeMir
Как проект DIY автоматизации, наверняка, интересно, но как «огородник-любитель» (второй год выращиваю чили на балконе: carolinareaperathome) не очень понимаю зачем оно нужно, если ориентироваться не на максимальный урожай при минимальных усилиях, а на удовольствие от процесса.
MinimumLaw
Ну, это ж IT'шный сайт. Конечно, такая автоматизация больше подходит для промышленного выращивания. Но ответ на вопрос «Зачем?» всегда один — «Потому что могу!». Подождите, пройдет некоторое время и вся лишняя автоматизация умрет сама собой. По факту важным останется тепличка (влажность поддерживать — очень актуально в условиях квартиры) и автомат подсветки (день-ночь запускает нужные циклы по усвоению удобрений). Ну, может еще земля на гидропонику поменяется. Впрочем, последнее уже не в теплице (не в такой во всяком случае).
В целом, положа руку на сердце, пока это по IT, а не про растения. Но это совсем не страшно. Пожалуй даже наоборот.
delhi_heir
Почувствовать себя колонистом на Марсе. :)
Ждём статьи про полный цикл: не только с салатом и грибами с картошкой, но и с рыбками и креветками, а возможно и с перепёлками и карликовыми кроликами. То есть, чтобы автоматом, при помощи Арудины, ботва скармливалась животным.
drWhy
Тот случай, когда плюсую за сиквел.
Но даже героиню Сигурни Уивер уболтали вернуться. А Марк Уотни — прирождённый инженер и почётный гражданин Марса.
Только вот не встретить бы ему в следующих сериях героиню Сигурни Уивер…
cyberly
В оригинале вежливый мальчик получил более сочный ответ, что-то вроде «Мальчик, ты е*нулся?»:
drWhy
Действительно сочнее. Впрочем, простим Уотни эту маленькую вспышку гнева — неизвестно как каждый из нас пережил бы подобный отпуск.
Xandrmoro
Например, для выращивания в подвале/на чердаке/с окнами на север/в иных местах с паршивой инсоляцией?
DaneSoul
Учитывая общую навороченность решения, горшочки с землей в него не очень вписываются.
В сторону гидропоники не смотрели?
ClownMik Автор
Смотрел. Если будет версия 3, то да, хотел бы попробовать гидропонику. Отсек под бак с водой можно переоборудовать для этих целей.
Meklon
А давай я по гидропонике проконсультирую, если хочешь?) Я все пилю пост на тему, но у тебя прям круто. Нечего на обычной почве делать с такой автоматизацией.


ClownMik Автор
Да, конечно. Было бы здорово. Постучался в личку
c_kotik
долой эти ваши лички! ждем статью) может даже совместную)
PS
А грибы на гидропонике тоже будут вымахивать по размерам?) Речь о шампьньнах естественно)
MinimumLaw
Боюсь расстроить, но шампиньоны сапротрофы. Им нужна именно отмешая органика, а не питательный водный раствор. Гидропоника подходит подавляющему большинству зеленых растений с преимущественно корневым питанием.
Я бы попробовал выращивать шампиньоны совместно с орхидеями. Может получиться очень хорошо. Но нужно создавать условия. Влажность, температура, свет… Да и орхидеи все же с другими грибами в симбиозе в дикой природе.
REPISOT
Где-то здесь, на хабре видел расчет, что белые светодиода, обеспечивающие такую же интенсивность света в нужных диапазонах спектра, что и специальные сине-красные «фито», будут стоить в несколько раз дешевле.
Wizard_of_light
Они энергии потреблять больше будут из-за неоптимизированного спектра. Другое дело, там надо считать, окупится ли экономия на электричестве в масштабе гроубокса.
u007
Эта статья? Освещение растений белыми светодиодами
Кроме того, на ютубе можно найти примеры выращенного под холодными, тёплыми и вот этими «фито». С большим отрывом побеждают обычные холодные белые.
drWhy
REPISOT
Только их клепают массово, в тысячи раз больше. Поэтому и цена соответствующая.
dydyman
Надо понимать, что для рассады и для вегетативной стадии роста большой разницы нет, белые светодиоды, или биколор. Но на стадии цветения плодоносящих культур биколор вне конкуренции из-за светодиодов 660нм, так как в белых пик излучения находится в лучшем случае на 630нм и почти не попадает в пик поглощения хлорофилла А.
А еще надо различать фитосвет, потому что сейчас на рынке куча светильников на так называемых fullspectrum светодиодах, там синий светодиод + люминофор, который переизлучает в красный. Но красный там тоже с пиком на 630нм, а потому этим светильникам далеко до монохромного биколора (450нм + 660нм). И в статье, на которую вы привели ссылку сравнение было как раз с таким фито светильником. В общем не рекомендую ориентироваться на ту статью, она больше запутывает.
Тут же автор, имхо, пошел самым верным путем — использовал белые светодиоды как дополнение к красным и синим, а не как основу.
u007
Отличное видео, кстати, да. На предмет хороших доказательств я пытал архив Киберленинки, правда и там качество исследований бывает как на Ютубе… Один вывод можно сделать: для полноценного роста нужен весь спектр, в т.ч. с точки зрения пользы для человека.
— Спектральный состав излучения влияет на стабильность развития микрозелени дайконаdydyman
Так же можно обойтись вообще без белых с добавлением зеленых монохромных светодиодов, это еще в 2008 году выяснили в НАСА.
Если же освещать только белыми светодиодами, то половина энергии излучения тратится в никуда, так как растениям не нужно столько света в желто-оранжевой части спектра, он нужен нашим глазам, для которых эти светодиоды и созданы.
По мне, так будущее фитосвета за монохромными светодиодами, только красные и синие нужно немного разбавлять другими частотами. Пока это получается дорого, и топовые производители света для растений все еще используют белые как основу, но уже добавляют к ним большое количество монохромных красных 660нм и небольшое количество УФ и ИК
Alexufo
а нельзя генетически убрать всю эту историю с лишней обвязкой в виде синтеза под светом, а тупо подать питание в растение с аккумулятора?
Alexufo
Я где-то читал что фитолампы опровергнуты в своих преимуществах ( одно -экономия электроэнергии. Типа не тратим энергию на «зеленые» фотоны.) перед белым светом.
kovserg
Какое потребление в Вт у данного устройства и сколько кВт*час на 100гр продукции требуется?
drWhy
В крупных городах салат активно выращивается в коробке либо на недешёвой площади крыш небоскрёбов, он как и икра — имеет либо первую свежесть, либо никакой.
Nimo_tsi
Меня боьше интересует, окупится ли ферма на таких теплицах, если зимой в качестве источника эл-ва использовать солнечные панели? Например, где-нибудь на Юге Сибири, где много солнца круглый год. А зимой ферма теоретически сама себя обогревать сможет за счет электроники)))
cyberly
Стоимость «солнечного» киловатт-часа высчитывается же и она, как я понимаю, в любом случае выше стоимости киловатт-часа из сети. Так что вряд ли оно окупится. Скорее, Иркутск или Красноярск имеют шансы «делать еду из электричества» относительно дешево.
drWhy
Окупается в ресторанах, окупится на Луне, т.к. другого варианта не будет. В Сибири — не знаю. Но пельмени и так вкусные ведь.
kovserg
Не вижу особых проблем что бы изменить среднее потребление за сутки на готовой установке.
ps: Предположим средняя мощность P ~ 40Вт, перцу надо t ~ 100дней => P*t ~ 100кВт*ч
на выходе 6 перцев по ~ 50гр => 0.3кг. Получится ~ 300кВт*ч / кг
subcommande
Продолжу: квт*ч в Иркутске стоит 1.17 рубля. Итого имеем 351 электрорублей/перцекилограмм при питании от городской сети.
Meklon
Чистая светокультура — всегда дорого, если вы там не особые виды травы выращиваете. Оптимально — досветка в дополнении к солнцу.
vickivanov
Интересно, если оценить этот проект не как хобби, а с финансовой позиции — т.е. посчитать стоимость затрат, включая затраченные часы — какова будет стоимость урожая?
Интересно не для того, чтобы ужаснуться, а чтобы подумать, можно ли это масштабировать — как тот проект с "умными теплицами" по франшизе, не помню названия?)
ClownMik Автор
К сожалению оценить очень тяжело, т.к. на эксперименты и проверку решений было потрачено немало средств и времени. Могу сказать точно, что места для оптимизаций предостаточно и итоговую стоимость явно можно уменьшить по сравнению в этим тестовым образцом.
gambit_fin
Есть такой канал
Nimo_tsi
А вы не боитесь, что платы и контакты у вас со временем выйдут из строя от влажности?
И интересно, зачем этот бокс вы поставили к окну, если все равно используете искусственное освещение? Не проще ли запереть в кладовке?
P.S. И да, кажется, если несколько стенок сделать металлическими — теплоотдача будет выше.
ClownMik Автор
Платы светодиодов на лампе промазаны специальным лаком. Возможно, стоит покрыть и остальные платы. Бокс стоит там где стоит потому что пока лучшего места для него просто не нашлось :)
ugnich
Мне любопытно: если покрасить горшки зеркальной краской — будет ли энергосберегающий эффект? Чтобы свет отражался от всего, кроме растений и почвы.
S0mbre
Проект очень интересный, обзор тоже, спасибо! Но, конечно, не покидает ощущение, что немного "из пушки по воробьям". То есть три отдельные платы, основной одноплатник не самый дешёвый, материалы тоже. А если сюда добавить вложенные усилия (хотя бы на тот же ГУИ)… Получаем изделие почти под патент ))
ClownMik Автор
Вы правы. Хобби вообще не про окупаемость =) Многое бралось с запасом и в исследовательских целях. Когда приходит понимание «как и что», можно и пооптимизировать. Но, безусловно, хотелось бы снизить итоговую стоимость.
Alexufo
Себестоимость нужно считать исхода из того, что выращивать))
siargy
лайк, впрочем для созданія высокой інтенсівності освещения люмки вне конкуренции, светики будут перегреваца
kipar
ошибся веткой
ClownMik Автор
Как раз чтобы они не перегревались используется крупный радиатор и небольшой рабочий ток. Лучше взять большее кол-во светодиодов и питать их малым током, чем меньшее и большим.
kipar
На STM можно хранить страницы и картинки в запакованном gzip виде (при этом декодер на сервере не нужен, просто в ответе сервера выдавать Content-Encoding: gzip). Так что если ограничиться векторной графикой то вполне можно и без SD, в мегабайт флеша влезть.
ClownMik Автор
Благодарю. Хорошая идея
Grigofrim
Интересная статья, спасибо
maverickcy
Чтобы её родимую выращивать, нужно очень постараться над сбором запаха. А проект — просто супер!
n00d1e
Столько труда вложил молодец развивай
И кстати первые острые перцы были прям хороши я помню.
MrVVoodman
Мне кажется, что морока со светодиодами для полного контроля спектра — это лишнее, вполне может хватить и пары ДНАТов.
Rukis
И одного хватит. Но они жарят сильно.
sim2q
ДНАТ банально страшно — +200С колба всё же
cyberly
рефлакс (который ДНаЗ) сильно меньше греется. На него даже руку можно сверху положить. Заодно он дает пятно с равномерной освещенностью, правда, не знаю, насколько это важно для гровинга. И эффективность отражателя у него больше 90%, ЕМНИП, а не ~70%, как у внешнего
siargy
днат, какраз тот случай, когда повышенное количество света с успехом компенсирует его низкое качество по спектру.
впрочем холоднобелые люмки Т8 на 36Вт из той же категории.
cze
К теме отлично подходит трек Децла «Шкаф».
Rukis
Не хотите регулируемую высоту света? Закон обратных квадратов всё таки, можно существенно поднять эффективность, особенно на ранних вегетативных этапах. Выдув поставить в верхнюю крышку, циркуляция воздуха — от растений, через бокс, радиаторы электроники и наружу.
ClownMik Автор
Да, идея здравая. Хотел сделать, но конструкционно показалось сложно уместить. Всего сразу не предусмотришь
subcommande
Спасибо, автор! Вы вернули мне желание изучать МК.
sergun_74rus
Высоту жидкости мы контролируем по давлению. Но бак придется просверлить.
Smileedition
Отличный проект!
Несколько вопросов:
Зачем несколько плат на управление и датчики? Почему не собрать все на одну плату с контроллером, мне кажется это логичнее.
Далее почему выбран json для общения с МК можно было использовать что то вроде модбаса, тем более что используется uart? Кажется достаточно трудоемко на контроллере собирать и парсить его
Зачем rtc у мк? Ведь он наверняка есть на плате с процессором, а контроллер может быть чисто исполнителем, прослойком между датчиками и устройствами управления
ClownMik Автор
Спасибо.
Собрать на одну плату действительно логичнее, но во-первых разработка своей платы на микропроцессоре это задача совсем другого уровня по сравнению с микроконтроллерами, во-вторых контроллер лампы я планирую использовать и как самостоятельное устройство в дальнейшем (наличие RTC по той же причине). К плюсам такого решения мне кажется также можно отнести модульную замену в случае выхода из строя какой-то из частей.
JSON — потому что мне показалось это удобным и уместным в данном случае. Собирать его вообще не сложно (справляется один sprintf()), а для парсинга есть много легковесных библиотек (я использовал jWrite).
Vbeerby
Какой получилась общая стоимость использованных на проект комплектующих?
ClownMik Автор
Вся электроника с учетом логистики и производства плат — 18к.
Корпус — ~12к.
Многие запчасти, электронные компоненты и крепеж остались, т.к. заказ шел от определенного кол-ва.
neolp
А можно нескромный вопрос, где вы такой бак взяли удачный?
ClownMik Автор
Доброго дня! Бак очень долго искал под габариты. Взял вот тут.
Ernest88
Возможно ли незатратное изготовление гроубокса, с повышеным давлением внутри? Слышал что это позитивно влияет на рост растений. Думаю если руки дойдут до подобного проекта, то попробую проверить эту гипотизу. Также ходят слухи, что на рост позитивно влияет повышенное содержание углекислого газа, именно растворенного в поливаемой воде.
Meklon
Ты раньше упрешься в другие лимитирующие факторы. Свет, питание и только потом углекислый газ.
gmardok
Советую еще аэропонику опробовать вместо земли — растет быстрее, результат больше и вкуснее плоды. Пробовал на помидорах этим летом с естественным освещением на балконе — растение зацвело и опылилось месяца на 2 быстрее чем в земле в теплице.
MinimumLaw
А вот это хотелось бы подробнее. Серьезно. По конструкции, по состоянию растений. В идеале и с данными по окружающей обстановке (температура, влажность). Очень интересная идея, но очень непонятно как к ней подступаться без двух куполов. А это уже не для домашних развлекух.
gmardok
Я вел канал в телеграме от сборки установки до практически плодов, но немного не досмотрел и в конце случилась авария.
MinimumLaw
Спасибо, посмотрел. Любопытно. По сути это выращивание томатов без почвы. Если честно, то я несколько удивлен тому что у вас получилось. По сути открытый грунт без грунта. Несколько не то, что представляешь себе когда слышишь «аэропиника». Окрытым остался только вопрос про питательный раствор. Чей (рецептура)? В каких концентрациях? Какой расход? Комбинированый или раздельные микро-макро?
gmardok
Я использовал синтетические (минеральные говорят не пойдут — забьет форсунки) advanced hydroponics of holland 1, 2 и 3 с дозировкой сначала в 4 раза меньшей потом в 2 по таблице с етикетки. Еще немного кальциево-магниевого удобрения добавлял до нужного уровня ppm. pH даже не мерял, хотя и инструмент и pH+/pH- имеются. Это уже не первый опыт, первый был именно в палатке и с лампой, только установка была масивнее и выращивал я не помидоры :). Теоретически недетерминантный сорт томатов должен расти без конца и изначальный план был по осени перенести растение в помещение под лампу, но не срослось в этот раз.
MinimumLaw
Спасибо. Интересная идея. Надо над ней подумать. Возможно, миниатюрная тепличка на подоконник, с диодами и орошением корней будет интересной идеей. Для начала под салат. Потом может быть и под землянику. В любом случае я призадумался…
Chanki
Очень интересно, спасибо за статью!
А был ли подобный опыт с гидропоникой? или есть ли такие планы?
ClownMik Автор
Спасибо. Опыта не было, но в планах есть.
sim2q
Спасибо!
Интересно почитать, хотя тема и не новая, но об этом писать можно вечно, т.к. всё время появляются новые решения. И на фоне проделанной работы конечно надо бы немного с законом Ома подружится, когда читал о LDO 48->5 сердце сжалось:)
ClownMik Автор
С Вами сложно не согласиться, но соблазн был велик. По моим расчетам должно было выдержать т.к. ток в пределах 50мА. Да оно в принципе и выдерживает, но как-то не всиляет уверенности.