
Я верю в гик-сообщество
Я хочу рассказать как я собираюсь это сделать, ищу помощников для воплощения в жизнь проекта, который должен стать на голову выше проприетарных решений.

Вся эта история началась 3.09.15г., я не описался, действительно, две недели назад. Я опубликовал пост о том как я построил робота-газонокосилку и объявил конкурс «Битва робокосилок». Это прочитали Вы, для меня это очень важно(немного инсада: написать статью было одной из целей при построении робокосилки). Об этом написал журнал Медуза. Меня попросили дать интервью для телеканала 360 Подмосковье и телеканала Россия, и везде я твердил о том, что робот-газонокосилка должен быть без проводов.

Затем один из ведущих представителей роботов газонокосилок Robomow и предложили сделать на их платформе свою версию робота с cableless технологией. Так же в активной фазе переговоры с Husqwarna, Bosch и Ambrogio.
Я хочу рассказать как я собираюсь это сделать, ищу помощников для воплощения в жизнь проекта, который должен стать на голову выше проприетарных решений. Так же я получил предложение протестировать GPS модуль для ровера и базы, который уменьшает погрешность GPS до 1-2см. В общем, за этим я здесь.
Интервью
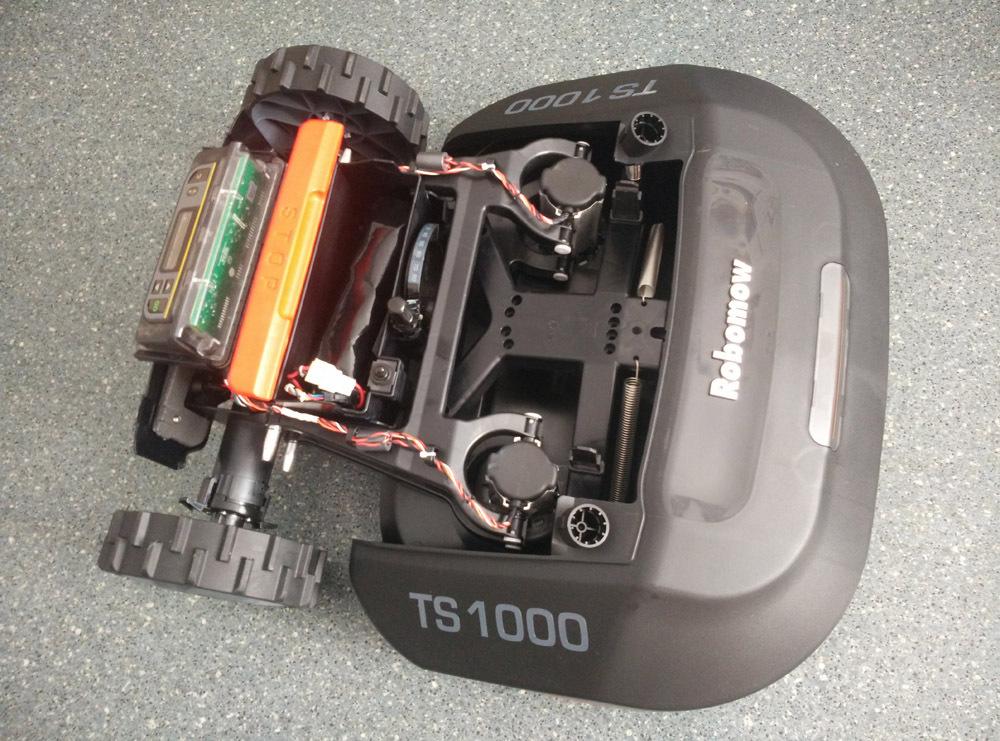
Устройство робота-газонокосилки Robomow
На хабре уже есть статья об устройстве данного робота. Мне представили для испытаний модель TS 1000.

Считаю данную платформу интересной:
- имеет максимальный в классе роботов газонокосилок захват
- позволяет выкашивать края
- имеет большую мощность кошения 2*200w
- позволяет качественно измельчать траву.
- имеет высокую проходимость
Одна из проблем с ходовыми двигателями и двигателями кошения. Для них нужен драйвер, но ничего подходящего не могу найти готового. Двигатели трехфазные коллекторные на 24В.

Возможные варианты ориентации в пространстве(просьба дополнять в комментариях)
-OpenCV
Возможны проблемы при загрязнении или закрытии камеры
-Ультразвуковые датчики
Если использовать только уз датчики то при обнаружении на участке травинки робот будет всегда объезжать это место, в итоге там разрастется сорняк.
-Бампер, т.е. ехать вперед пока не упрешься
Сложно настроить таким образом чтобы одинакового хорошо работало и для низкорослых растений и для деревьев, но при этом сократить число ложных срабатываний.
-Камера отдельно на столбе в углу периметра для корректировки местонахождения
Сложность в монтаже, доп. оборудование. Проблема с мертвыми зонами.
-RFID метки по границе периметра.
Как возможный вариант
-Лидар
Дорого
План работ
Планирую с помощью GPS определять точные координаты робота в системе координат. Участок виртуально буду делить по ширине скоса, если квадрат пустой он помечается в базе как пустой, если есть препятствие — в отдельной таблице прописываем точное расположение препятствий в соответствующем квадрате с сантиметровой точностью. При первом кошении робот объезжает все поле и формирует карту с помощью ультразвуковых датчиков, затем оператор через GUI-интерфейс отменяет препятствия или добавляет объекты на карту.

TODO:
-Подобрать или сделать драйверы для ходовых двигателей и двигателей кошения
-Подключить GPS RTK
-Решить вопрос с проблемой подъезда к бассейну(Возможно использование RFID метки)

Поиск единомышленников и заинтересованных лиц
Я собираю команду для развития своей идеи и разработки абсолютно новой концепции работы робокосилок, которую на текущий момент не реализовал ни один производитель. У меня есть договоренность о внедрении наших разработок в коммерческие продукты. Я надеюсь на помощь со стороны нашего государства и пытаюсь использовать компоненты российского производства. Если у Вас есть предложения или Вы хотите стать членом команды пишите письма крупными буквами.
P.S.: Из-за большого количества заявок http://robogazon.ru/ регистрация на конкурс открыта только до 1.01.2016г.
Только зарегистрированные пользователи могут участвовать в опросе. Войдите, пожалуйста.
Комментарии (27)

IronHead
16.09.2015 14:31Насколько велика скорость передвижения газонокосилки? Бассейн можно отслеживать инфракрасным датчиком (светодиод и фотодиод, а между ними непрозрачная перегородка) направленным вниз. Алгоритм простой: есть отражение — едем, нет отражения — значит там пропасть (нужно делать обработку сигнала с нескольких датчиков, чтобы исключить влияние травинок). Датчики дешевые, ими можно обвесить все борта робота по периметру.
По поводу отслеживания перемещений — сделать что то типа оптического энкодера по принципу оптической мыши (не лазерной, а именно оптической). Тогда исключается ошибка от проскальзывания колес.

frolic
16.09.2015 15:02Способ ориентации на любой местности:
1) Четыре ультразвуковых излучателя в корпусе светодиодных садовых фанариков на солнечных батареях.
2) Квадракоптер или любой другой летательный аппарат способный нести камеру
3) Сама газонокосилка.
Излучатели расставляются по углам прямоугольника. Квадракоптер взлетает и делает аерофотосъемку обозначенного прямоугольника. Уже на планшете или компьютере на полученное изображение накладывается сетка и отмечаются квадраты для кошения.
Определять препятствия все-таки лучше ультразвуком, просто датчик нужно устанавливать не на бампере, а на каком-нибудь штативе на определенной высоте.
webzuweb
16.09.2015 15:061)Участки бывают не только квадратные
2)Я думаю с квадрокоптером это решение для гиков…
3)?
Вопрос не только в том чтобы построить карту, но и точно определить координаты косилки.
По поводу штатива, проблема понять как отличить высокую траву от низкорослых цветов.frolic
16.09.2015 15:37Вот в этом посте описан способ ориентации с помощью ультразвука. Точность позиционирования +- 2 см.
1) Участок любой формы можно вписать в прямоугольник
2) Если вы хотите продавать, то в комплект поставки можно включить самый дешевый квадрокоптер. От него требуется взлететь вертикально вверх на нужную высоту и сделать фото, причем качество не принципиально
3) Автоматическая газонокосилка, которую Вы разрабатываете
Я конечно не эксперт по растениеводству, но моя теща сажает цветы в специальных местах (клумбах), которые можно отметить как зоны запрещенные к кошению.

unwrecker
16.09.2015 18:02Усложняете по-моему. Нужно определить наличие травы перед косилкой? Ну так просто поставить на нос косилки створ с оптопарой в узкой части. Трава будет направляться створом к оптопаре, а деревья и стены не пролезут. Несколько оптопар на разной высоте — и мы определяем высоту травы. И никаких камер и квадрокоптеров. Навигацию можно использовать инерциальную с базой в качестве точки отсчёта. База ведь будет по любому? Точный выход на базу — по ИК-сигналу. От падений можно защититься ультразвуковым датчиком.
webzuweb
16.09.2015 21:32Учтите что основная задача косилок — это мульчирование травы, т.е. снимается не более см., я сомневаюсь в успехе предложенного метода со створом.
unwrecker
17.09.2015 22:47То есть предполагается, что трава уже предварительно покошена и надо её подравнять на сантиметр? Да, такая методика мне чужда…
webzuweb
17.09.2015 22:59Предполагается что Вы один раз перед запуском к Вам на участок робота подстригаете аккуратно газон и весь сезон робот все делает сам.
unwrecker
18.09.2015 09:57Ну тогда я вообще не вижу смысла в этом роботе. Это всё равно что мыть посуду перед закладкой в посудомойку.

BelBES
18.09.2015 10:46+1Смысл в том, что в некоторых регионах газоном считают не каждую лучжайку с травой, а аккуратно подстриженную лужайку… и в ручную каждый раз 1-2 см газона подравнивать утомительно, если это будет делать робот, то можно сэкономить часть времени) В США и прочих странах, где за неподстриженый газон можно словить штраф, на таком роботе вполне можно заработать.

BelBES
16.09.2015 23:18-OpenCV
Возможны проблемы при загрязнении или закрытии камеры
А на высокую мачту вынести камеры? Ну и стоит заметить, что визуальная одометрия штука довольно тяжелая и может занять все процессорное время RPi, т.ч. при таком выборе бортового ПК вероятно стоит отказаться от этой идеи, если нет желания закапываться в жесткую оптимизацию кода под железо.webzuweb
17.09.2015 11:49На участок сложной геометрии нужно будет много мачт. При этом все равно будут слепые зоны. А это доп. оборудование, протяжка проводов для питания, стоимость оборудования. Возможно как хобби-проект это пойдет, но в коммерческом плане я думаю абсолютно не жизнеспособно.
BelBES
17.09.2015 11:56На участок сложной геометрии нужно будет много мачт.
Я имел в виду, что мачту надо устанавливать на самого робота. Если установить камеру на метровой высоте, то на газоне камеры уже не будут так пачкаться.
Что-то вроде того, как сделано у curiosity

Rencom
17.09.2015 08:34В чем вообще фишка девайса? чисто спортивный интерес? Траву убирать кто будет?
Нельзя постоянно вываливать мульчу на газон, это его угробит очень быстро. Таким агрегатом только дикий сорняк (лужайку) косить на даче.webzuweb
17.09.2015 11:59Такие девайсы существуют более 30 лет, траву и правда убирать не нужно. При регулярном скашивание получается измельченная трава. Эта мульча отличное удобрение. Знаете как английский садовник раскрыл секрет идеального газона? Нужно убрать сорняки, разровнять поле, засеять и 100 лет поливать и удобрять.
Rencom
17.09.2015 12:09При регулярном скашивание получается измельченная трава. Эта мульча отличное удобрение.
Да, только мульчировать никак не раз в неделю. Газон тупо сопреет под таким слоем мульчи.webzuweb
17.09.2015 23:04Очень странно это слышать, ведь работают уже такие роботы, и ничего, все аккуратно получается.
Losted
А точности GPS-то хватит для этих целей? Насколько я помню, для гражданских целей погрешность может составлять несколько метров, что для целей определения положения клумбы с цветами или бассейна может быть очень критично.
webzuweb
В этом и смысл GPS RTK что за счет отдельностоящей базы и приемника на ровере уточняется до погрешности =-1см.
bobcatt
Автономный GPS такой точности, которая нужна автору, не обеспечит. Надо смотреть в сторону приемников с диф-поправками, но их тоже кто-то должен отдать. И как правило не бесплатно.
Проще под газоном RFID метки закопать, так хоть расходы будут разовые.
ToSHiC
RTK алгоритм для GPS приёмника это и есть схема с диф. поправками. Нужно 2 приёмника, которые умеют выдавать фазу сигнала, и немножко софта. Погрешность определения положения ровера в системе отсчёта, связанной с базой, порядка 10см на расстоянии до 10км. Нужен канал передачи данных между ровером и базой, и желательно хорошая антенна на базе.
Софт — опенсорс, приёмники есть в ассортименте, платишь только за железо.
webzuweb
Более того один российский разработчик обещает для тестов предоставить комплексное решение. Канал на выбор УКВ, WiFi, BT, LTE