
Добро пожаловать в наше уютное конспирологическое логово. Сегодня мы будем рассматривать тени на фотографиях с Марса, округлять числа и писать отвратительный код.
 и предмет исследования (слева)")
В этом выпуске: астрономические наблюдения теней в пустыне, аугментация ушей, заглядывание за левый край видео, гадание по фотографиям и особенности работы GSCMOS матриц семилетней давности.
Лифт (предположительно работает):
Вертолеты на Марсе
1.1 Оценка расстояния до Марса
1.2 Ошибки?Вертолеты жужжат
2.1 Blade Passage Frequency
2.2 Эффект Доплера
2.3 Оцениваем скорость вертолета
2.4 …расстояние до марсохода
2.5 …точки взлета и посадки
2.6 …дальность полета
2.7 …план полета
2.8 Симуляция эффекта Доплера и сравнение
2.9 Ошибки?
2.10 Всякое
2.11 Оффтоп 1: Пассивный Доплер-радар
2.12 Оффтоп 2: Марсианская аэродинамикаВертолеты не отбрасывают тень
3.1 Оценка характеристик камеры и оптики
3.2 Почему лопасти прозрачные?
3.3 …они прозрачные в ИК?
3.4 Оффтоп 3: ИК-фотография для бедных
3.5 …они путешествуют во времени?
3.6 Оценка эффективности затвора
3.7 Откуда на фото градиент яркости?
3.8 Передний край
3.9 Ground truth
3.10 Симуляция глобального затвора
1. Вертолеты на Марсе
Маленький вертолет летает на Марсе, но где летает Марс? Насколько он дальше от Солнца чем Земля? Насколько меньше света достается камерам и солнечной батарейке?
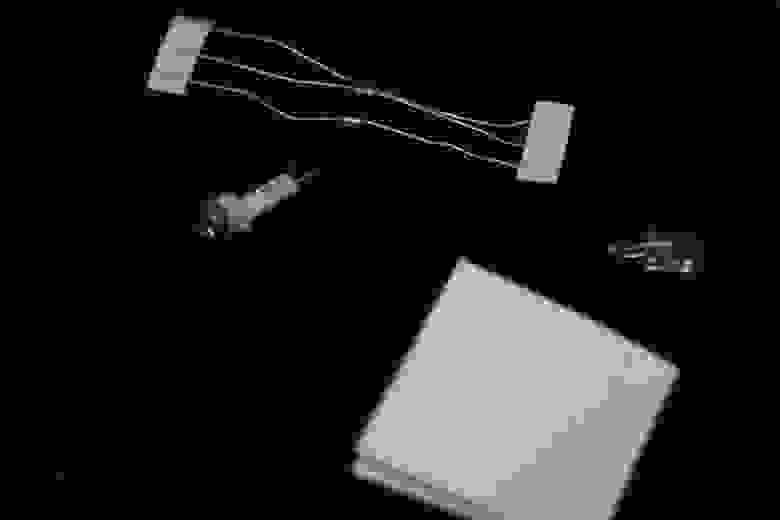
У меня нет фотографии солнечной батарейки, чтобы по ней гадать, зато есть фотография тени от солнечной батарейки:


Тень должна быть шириной с саму батарейку (165мм), ведь лучи от солнца параллельны. Можно взять ширину тени на фото и пересчитать пиксели в миллиметры.
2086 пикселей = 165мм. 0.079мм/пиксель.
Зачем нам это, и почему где-то в середине тени, а не по её верхней границе? Потому что перспектива заваливает размеры, а именно на этой линии слева нет особо крупных камней.
Как раз там, где тень переходит в свет.

Солнце, хоть и находится очень далеко, имеет заметный угловой размер на небе и границы теней от него не идеально резкие. Хуже того, ширина полутени (L) очень просто зависит от расстояния до предмета отбрасывающего тень (h), и углового размера Солнца (a)
Вооружившись этим знанием, а так-же тем, что высота Ingenuity составляет 49см, а солнечная батарея находится на самой его макушке, мы можем прикинуть, насколько далеко находится Марс.
Для начала измерим полутень. Песок и камни мешают это сделать вручную, но их можно усреднить. Повернем фотографию так, чтобы граница тени была строго вертикальна, берем кусок без камней, и сохраняем.

Дальше надо преобразовать картинку в Ч/Б, усреднить все строки и построить график яркости от координаты X. 10 строчек на питоне:
import sys
import numpy as np
from PIL import Image
import matplotlib.pyplot as plt
im = Image.open(sys.argv[1]).convert('L')
im.resize((im.size[0],1), Image.ANTIALIAS)
plt.plot(np.arange(im.size[0]), np.array(im).mean(axis=0))
plt.show()
Яркость начинает падать примерно на x=43 и перестает на x=80. Ширина полутени получается 37 пикселей, или ~3мм.
Теперь, проведем такой-же эксперимент на Земле. Тень от предмета на расстоянии 49см:

Ширина полутени получилась 4.56мм. Делим одно на другое и узнаем, насколько Марс дальше от Солнца, чем Земля: 4.56/3 = 1.52. А значит света на Марсе в 1.52^2 ≈ 2.3 раза меньше (без учета особенностей атмосфер обоих планет).
Теперь, расстояние от Солнца до Марса: отношение полутени к высоте солнечной батареи 3/490 = 0.00612. Диаметр солнца 1.3927 миллионов километров, значит расстояние 1.3927/0.00612 = 227.5 миллионов километров.
1.2 Ошибки?
На самом деле расстояние от Марса до Солнца меняется от 249.2 до 206.7 миллионов км в течении года. А в день когда было сделано фото (9 апреля 2021), оно составляло 242.8 (подсмотрено в Stellarium). А соотношение расстояний Марс/Земля было не 1.52, а 1.623. Ошибка в 6.3%, неплохо для разминки.
Ошибка в 1px при измерения полутени от Ingenuity даст погрешность в 1/37 ≈ 3%, а ошибка в 1см в высоте батарейки над тенью (земля под вертолетом не идеально ровная) - погрешность в 2%. Я так-же не исправлял искажения объектива и перспективу, наивно надеясь, что если всё достаточно хорошо центрировать, то ошибки друг друга скомпенсируют. Дуракам, очевидно, везет.
С количеством света интереснее. У Марса почти нет атмосферы, а вот у Земли есть. И она поглощает заметную часть энергии приходящей от Солнца. Из 1350 Вт/м2, которые получает Земля от Солнца, до поверхности долетает только 1040. А до поверхности Марса ~530 Вт/м2 из 586. Разница в 1.9 раза, а не в 2.3.
2. Вертолеты жужжат
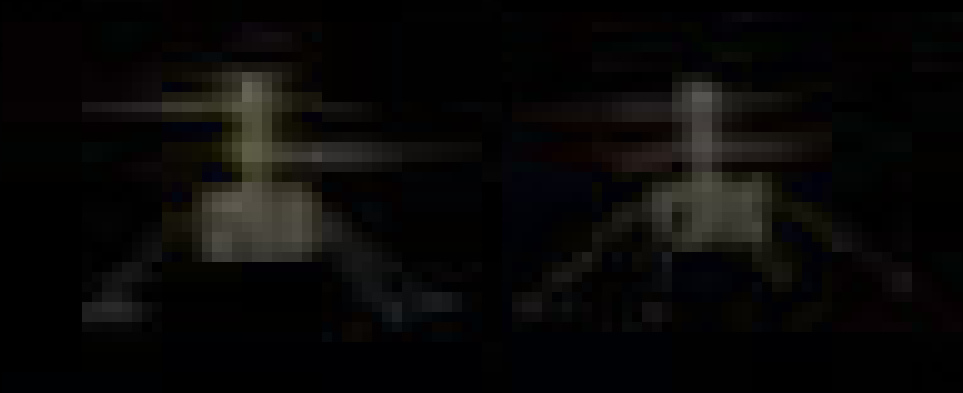
Вертолет, летающий на Марсе, работает на солнечной батарейке, 18650 аккумуляторах, процессоре от смартфона и камерах от Raspberry Pi. Ну разве не потрясающе? Смотрите, как летает:
И на видео даже слышно жужжание винтов! Perseverance, снимающий видео, смотрит на пропеллеры сборку (т.е. находится примерно в плоскости вращения), а значит в спектре звука должна быть очень заметна Blade Passage Frequency. Этот компонент зависит от скорости вращения винта и количества лопастей, а его главная гармоника:
Где n - количество лопастей пропеллера, RPM - обороты в минуту.
Можно собрать пропеллер и проверить как должна выглядеть BPF. Хватаем моторчик от мелкого квадрика и винт от него же. За неимением референсного тахометра, собираем его из спичек и желудей: светодиод воткнутый в микрофонный вход компа и фонарик.
Для получения спектра берем первое попавшееся по запросу «microphone FFT online»
")
Тени от лопастей проходят мимо светодиода каждые 2.94ms, перекрывая поток света от фонарика, что вызывает изменение фотоэлектрического тока, и уровня сигнала на микрофонном входе. За каждый оборот мимо датчика проходят обе лопасти, так что период вращения винта получается 6ms. А обороты — 10'000 RPM.
Вооружившись этим знанием, берем приложение-спектроанализатор и смотрим на спектр пропеллера:

337Гц — та-самая BPF, и разные её гармоники. Убедившись, что всё сходится, посмотрим на BPF вертолета.
Качаем видео, пихаем его в ffmpeg:
ffmpeg -i ./6015_20210507_HelicopterFliesOnMars-1280.m4v \
-lavfi showspectrumpic=s=3000x3000:fscale=log spectrogram.jpg
Картинка получается возмутительно большой, но зато разрешение по частоте и времени позволяет всё разглядеть.

Видно, что пик находится примерно на 84Гц.
Но у ведь Ingenuity не простой винт, а два соосных. Это 2 лопасти или 4?
Не совсем очевидно, но 2. Можно представить себе два пропеллера вращающиеся с одинаковой (иначе вертолет закрутит) скоростью: оба будут шуметь на одной частоте. И как их шум не складывай, ничего кроме громкости меняться не будет.
А можно собрать модель соосного пропеллера из двух обычных и проверить:

Моторы соединены вместе, но повернуты лицом друг к другу, так что винты вращаются в противоположные стороны. Но лопасти на винтах закручены по-разному, поэтому поток направлен в одну и ту же сторону. RPM (измеренный всё тем же светодиодом) получился примерно 6000 у каждого.
А спектры шума выглядят вот так:

Пик на ~200Гц как раз соответствует BPF1 для двухлопастного винта на 6000RPM. Обратите внимание что пик двойной — обороты у винтов всё-же немного различаются, и BPF тоже.
А если слушать винты сверху, BPF1 уже не так заметна:
")
В видео гораздо меньше гармоник BPF. Потому, что звук отфильтровали, заглушив всё лишнее. Но если присмотреться, на спектрограмме видны остатки высших гармоник:

BPF1 на ~84Гц, а значит пропеллеры вращаются примерно на 60*(84/2) = 2520RPM.
Фраза «You can also hear the sound change as the helicopter leaves the area and then returns. That’s called the Doppler effect» которая появляется в видео, меня очень расстроила, потому что я никакого Доплера не слышал. Придется прибегнуть к помощи Машины.
2.2 Эффект Доплера
Вытащим звук из видео в WAV и скормим его numpy. Тон BPF самый громкий (спасибо неизвестному звукорежиссеру из JPL), поэтому мы можем просто выбирать самый высокий пик на FFT и, двигаясь по файлу скользящим окном, построить график его частоты по времени.
Важно выбрать достаточно большое окно, чтобы получить хорошее разрешение по частоте. Если мы хотим (а мы хотим!) разрешение в 0.1Гц, окно должно быть 1/0.1 = 10 секунд.
Почему 10?
Представьте что у вас есть запись длительностью 1 сек, в которой только одна частота. Пусть будет 10Гц. Вы можете посчитать сколько периодов помещается в 1 секунду - 10 штук.
Если частота будет 11Гц, вы насчитаете 11 периодов. Но вот если она будет 10.5Гц, вы уже не сможете уверенно сказать количество. У FFT такие-же проблемы.
Разрешение по частоте определяется как Fs/N где Fs это частота дискретизации, а N количество семплов в выборке. Или, если выборка задана в секундах, как 1/T.

Максимальный сдвиг частоты от центра ~1Гц, или 1.2% от 84Гц. Гугл сообщает что человек различает на слух разницу частот в 0.5%. Ну и пусть различает, а мы посмотрим график:
Сразу после взлета вертолет неподвижен. При этом BPF звучит на 84.36Гц, что уточняет обороты до 2531 RPM.
Примерно на 32 секунде BPF начинает увеличиваться. А на видео в это же время вертолет начинает разгон. Задержки между видео и звуком не видно, что при скорости звука в 250м/c дает расстояние до вертолета не более 250 метров.
Скорость звука на Марсе
Сильно зависит от времени суток из-за больших перепадов температуры. Она меняется от 216 (при -95°С) до 270 (+5°С) м/c. Вот тут рассказывают как её измерять, стреляя лазером в камни и слушая задержку. Кстати, тем же самым микрофоном, через который мы слушаем вертолет. 250 м/c я взял практически по-памяти и это отлично совпало со скоростью при текущей погоде. -27°C дают 247м/c.
Раз мы знаем скорость звука, сдвиг частоты можно пересчитать в скорость. Наблюдатель неподвижен, поэтому:
Где v скорость вертолета (вдоль луча зрения), vs скорость звука, f частота для нулевой скорости (84.36Гц), fo - наблюдаемая частота.
При разрешении по частоте в 0.1Гц, разрешение по скорости выходит ~0.3м/c. Неплохо.

Видно, что график симметричный относительно центра, значит вертолет летал примерно одинаково туда и обратно. В центре есть 3 секунды, когда скорость была нулевой: на взлет и посадку нужно больше, значит он просто потупил в дальней точке и полетел домой.

Относительная скорость в начале отрицательная (он приближается!), а на 44 сек резко переходит через 0 и продолжает расти. Вертолет летел по прямой, поэтому путь должен пролегать примерно так
2.3 С какой скоростью он летал?
На 42й секунде видно, как Ingenuity завершает разгон и возвращается в вертикальное положение. Эффект Доплера дает нам лучевую скорость ~1м/c в этот момент. Скорость в проекции можно оценить взяв два кадра из видео с разницей в пару секунд:

347/2 = 173 пикселя за секунду. Высота от дна корпуса до верхушки вертолета ~36 см, а на картинке ~17.5 пикселей: скорость в проекции 173*(0.36/17.5) = 3.56 м/c.
А полная скорость из этих двух компонентов: 3.7 м/c.
2.4 Можем ли мы уточнить расстояние от ровера до вертолета?
Возьмем два фрейма в начале полета: тот на котором Ingenuity еще не начал разгон, и тот на котором он уже почти вылетел из кадра.
Можно измерить размер вертолета на обоих фреймах (лучше всего измерять высоту от дна корпуса до верхушки) и узнать, что он увеличился примерно с 16.5 до 17.5 пикселей, или на 6%.
Между фреймами прошло 10 секунд, в течении которых вертолет разгонялся, и его максимальная скорость вдоль луча зрения составила ~1м/c. При равномерном ускорении это дает (1/2)*10 = 5 метров на которые вертолет приблизился к камере.
За 5 метров угловой размер вертолета вырос на 6%. Что дает нам 5/0.06 = 83 метра дистанции на момент старта.
Но этот метод очень грубый: Если бы размер изменился не на 1 пиксель, а на 2, дистанция получилась бы 43 метра. Да и лучевая скорость у нас с разрешением 0.3м/c.
Попробуем прикинуть расстояние еще одним способом. Можно сделать очень смелое предположение, что вертолет летает какой-нибудь из сторон ланчбокса вперед, и посмотреть как он ориентирован в начале полета.

3D модельку можно покрутить тут
Выглядит как 22.5°.
А значит,

Разгон начинается в 32 секунды, а в 44 секунды скорость на графике переходит через 0 — в этот момент он летит перпендикулярно лучу зрения. 10 секунд ускорения и 2 секунды полета на 3.7м/с дают 26 метров от начала полета до ближайшей к камере точки. Отсюда,
Правда наверняка где-то между, поэтому возьмем среднее от 83 и 68 — 75 метров.
Кстати, можно представить поле зрения камеры: за время пролета вертолета через весь кадр, направление изменилось на 22.5°. Горизонтальный FOV в 24° дает 55мм объектив кроп-факторе 1.5. То есть буквально как китовый 18-55 на камере с APS-C выкрученный на самый большой зум.
2.5 Места взлета и посадки отличаются
Сравним два кадра:

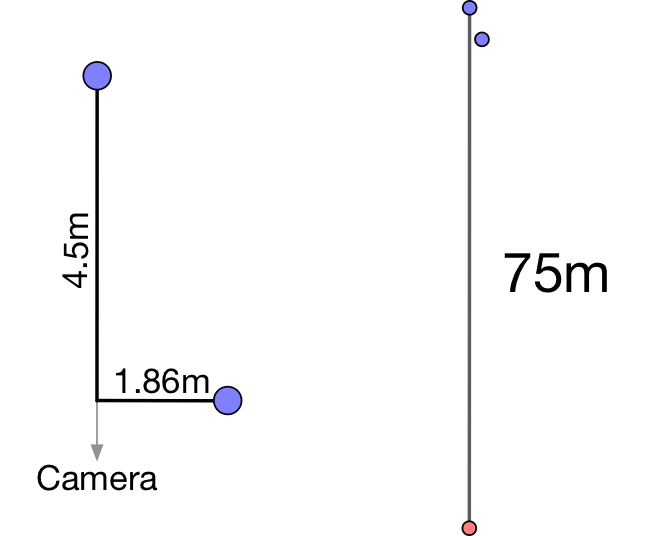
Картинка увеличена в 10 раз, смещение на 85.5 и 5.5 пикселя. Место посадки было правее и ближе, чем место взлета.
Высота вертолета от дна ланчбокса до верхушки - 36см и 16 пикселей на фото, значит он сместился на 85.5*(36/16) = 186 сантиметров вправо в проекции.
5.5 пикселя вниз, дают 12см в проекции. Предположим, что поверхность ровная и плоская, и что высота мачты с камерой на ровере 2 метра. Тогда, смещение по поверхности вдоль луча зрения 0.12*(75/2) = 4.5 метра.

Что дает:
2.6 Как далеко летал Ingenuity?
Мы знаем, что места взлета и посадки различались, поэтому считаем по-отдельности:
По графику видно, что он начал движение в 32сек, а закончил в 79: 47 секунд полета, из которых 20 на разгон и торможение: 273.6+203.6/2 = 134,7 метра для первой части маршрута.
Обратный путь начался на 82 и закончился на 129 секундах, что тоже дает 47 секунд.

Значит, видимое смещение точки посадки вправо вызвано просто углом траектории относительно луча зрения (а может быть, скорости были разными для двух участков пути):
Действительно, arctan(1.86/4.5) ~ 22.5°. А угол a очень мал, потому что длина пути гораздо больше расстояния между точками.
Суммарная дальность полета получилась 269.4 метра.
2.7 Теперь можно нарисовать план полета
Мы знаем все нужные расстояния и углы:

2.8 Симуляция жужжания
Перед тем как сравнивать всё это безобразие с реальными данными, маленькое отступление. Спектрограмма выглядит страшно, на ней видны порывы ветра, которые почти заглушают гудение мотора. Разрешение в 0.3м/c и окно в 10 секунд не внушают доверия. Можем ли мы вообще говорить о точности в 1 секунду, когда окно такое большое?
Давайте набросаем симулятор жужжащего вертолета. Отсюда можно взять относительные координаты ровера, и точек в которых садился вертолет:

Смотрим координаты на скриншоте и измеряем полоску с масштабом:
meters_per_pixel = 50/167
rover = np.array([740, 274])*meters_per_pixel
heli_p1 = np.array([501,209])*meters_per_pixel
heli_p2 = np.array([573, 653])*meters_per_pixel
heli_p3 = np.array([520, 210])*meters_per_pixelДобавим разные параметры по-вкусу:
dt = 0.1
hover_time_at_liftoff = 10
hover_time_at_p2 = 3
hover_time_at_landing = 10
accel_time = 10
max_speed = 3.7
center_freq = 84.36
speed_of_sound = 250И составим план полета:
hover(hover_time_at_liftoff) # Hovering at p1
set_target(heli_p2)
accelerate(max_speed, accel_time) # Accelerating at p1
free_flight(accel_time) # Flying to p2
decelerate(0, accel_time) # Decelerating at p2
hover(hover_time_at_p2) # Hovering at p2
set_target(heli_p3) # Going home
accelerate(max_speed, accel_time) # Accelerating at p2
free_flight(accel_time) # Flying to p3
decelerate(0, accel_time) # Decelerating at p3
hover(hover_time_at_landing) # Hovering at p3Чо творится?
Каждая из функций апдейтит положение вертолета и, с шагом dt заполняет массив значениями BPF с учетом скорости.
hover(t) не меняет скорость и завершается через t секунд
set_target(p) меняет вектор направления вертолета, чтобы он двигался к p
accelerate(s, t) увеличивает скорость до s в течение t секунд
free_flight(t) сохраняет текущую скорость и завершается, когда время до цели будет < t
decelerate(t) - как accelerate только с другим знаком и s = 0.
Получилась вот такая красота:

Выглядит точь-в-точь как график, полученный из видео. Амплитуды и тайминги похожи. Чуть ниже будет картинка с наложением одного на другое, а пока можно поиграться с симулятором и посмотреть, что изменится при разных параметрах полета.
Допустим, дальняя точка была расположена на том же удалении, но так, что вертолет улетает под углом 10° (а не 22.5°) к проекции камеры:
heli_p2 = np.array([457, 653, 5])*meters_per_pixel
Скорость приближения в начале и конце полета гораздо ниже, а сдвиг частоты всего 0.05Гц. Мы бы даже не заметили этого на графике.
Теперь сложнее. Пусть вертолет, после того как вылетит из кадра, поворачивает немного в сторону, а потом тем же путем возвращается обратно:

Получатся так:

Видно момент, когда из-за смены направления резко меняется относительная скорость. Я сделал поворот моментальным, в реальности переход был бы более гладким, но с такой-же амплитудой. Не уверен что его было бы видно на нашем графике, но более резкий поворот точно будет заметен.
2.9 Ошибки?
1) Реальное значение RPM было 2537 а не 2531. Ошибка около 0.2% или 0.2Гц для BPF. Вполне близко к пределу точности измерений.
3) Скорость полета, по данным в википедии, 3.5м/c, а не 3.7м/c. Ошибка в 6%. Неплохо, учитывая то, как мы её измеряли.
Можно наложить график симуляции на реальные данные и сравнить:

Видно что симуляция (со скоростью 3.7м/с) немного спешит.
Еще стоит заметить, что в симуляции я не учел задержку звука. Но она составляла всего полсекунды в дальней точке:
Rover-Heli dist @ start: 74.2 meters, sound lag 0.30 sec
Rover-Heli dist max: 124.0 meters, sound lag 0.50 sec4) Расстояние от камеры до Ingenuity на старте, измеренное по карте, получилось 74 метра, а не 75. 1.3% и наглядное подтверждение того, что измерять вещи разными способами и усреднять полученное — полезно. Но вообще, скорее повезло.
6) Дальность полета, по данным из википедии, составляла 268.5 метров в обе стороны. У нас вышло 269.4 метра. Ошибка в 0.3%. На удивление, гораздо меньше ошибки в скорости. Видимо какие-то из предположений (одинаковое время разгона-торможения, равномерное ускорение, одинаковая длина путей) оказались ложными, но ошибки скомпенсировали друг-друга.
5,7) Можно наложить наш план полета на реальную карту:

Я выбрал в качестве опорной точки положение марсохода, а в качестве опорного направления — линию между ним и точкой старта. Совпало хорошо. Чуть-чуть ошиблись в точке посадки, и на пару градусов по направлению. В обоих случаях мы разглядывали 2,5 пикселя, так что ошибки можно понять.
2.10 Всякое
Последняя интересная вещь в видео — посадка вертолета. Коснувшись земли, он немного подпрыгивает и окончательно приземляется на 136 секунде. А на спектрограмме из ffmpeg виден момент когда винт начинает резко сбрасывать обороты:
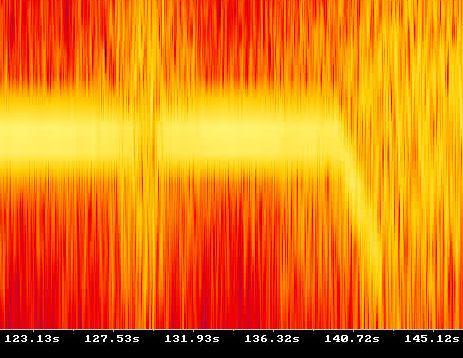
Разница между приземлением и отключением пропеллера 3 секунды. Ingenuity, коснувшись песка, медленно и осторожно уменьшает угол атаки винтов, постепенно увеличивая нагрузку на грунт. И только когда убедится, что опора надежная — выключает моторы. А в эти 3 секунды он готов взлететь и повторить попытку, если датчики заметят что-то неладное.
А вот видео, где вся движуха собрана на один экран:
Вертолеты на Марсе действительно жужжат, и жужжат занимательно.
2.11 Оффтоп 1: Пассивный Доплер-радар
Вернемся к симулятору жужжания:
meters_per_pixel=1.0
rover = np.array([0, 0, 0])*meters_per_pixel
heli_p1 = np.array([5000.0, 200, 200])*meters_per_pixel
heli_p2 = np.array([-3000.0, 200, 200])*meters_per_pixel
. . .
set_target(heli_p2)
accelerate(200, 1)
free_flight(1)Тут вертолет быстро разгоняется до 200 метров в секунду, и пролетает мимо ровера:

Скажем, мы хотим по этой записи найти скорость вертолета, но не знаем даже BPF для нулевой скорости.
Но лучевая скорость становится нулевой в тот момент, когда он пролетает ближайшую точку. И ее можно найти, если принять, что скорости до и после пролета были одинаковыми, но с разным знаком:
Действительно, если взять f1 = 417Гц, а f2 = 45Гц (я взял точки в противоположных концах графика), получается 81.2 Гц. Ошибка в 2.5%, но это не так важно, потому что:
v1 = 250*(81.2/417-1) = -201.3 m/s
v2 = 250*(81.2/45-1) = 201.11 m/s
В тех точках где я измерял частоты, вертолет находился достаточно далеко (порядка 3км), так что я пренебрег поправкой на направление. Но если вам интересно, на 3км угол к лучу зрения получается 5.5°, а cos(5.5°) = 0.995. Погоды не делает.
Ошибка получилась меньше 0.5%. Круто? Попробуем в деле:
Возьмем видео с самым красивым самолетом. 20и-метровый кусок металла с аэродинамикой шлакоблока и радарной сигнатурой маленькой птички, не падающий с неба только благодаря хитрой управляющей электронике. Да, я про F-117:
Можем ли мы измерить его скорость?
Посмотрим на спектрограмму:

Кривая перехода сразу бросается в глаза. Возьмем две частоты и посчитаем:

Частота для нулевой скорости получилась 422Гц.
А скорость вдоль луча зрения в начале видео:
350*(422/898 - 1) = -185.5 м/c
Но летел он не прямо на камеру, а под углом градусов в 15. Так что реальная скорость:
-185.5/cos(15) = -192м/c
Какая была на самом деле? К сожалению видео об этом умалчивает, поэтому возьмем два соседних фрейма, где самолет летит на фоне гор, совместим и измерим:

F-117 в длину 20.1 метр. Но это до края хвостового оперения. А до заднего края корпуса — 17.1 метр. Скорость получается 43*(17.1/110)*30 ≈ 200 м/с. Мы ошиблись на 4%. Наверняка из-за кривой оценки угла, или скорости по фреймам.
2.12 Оффтоп 2: Марсианская аэродинамика
Как известно, у летательного аппарата два врага: сила тяжести и сопротивление атмосферы. Мне было интересно оценить, насколько на вертолет влияет второе (может ему и правда надо летать углом вперед?).
Где Fd сила сопротивления атмосферы, p - плотность, v - скорость вертолета, A - площадь сечения, а k - аэродинамический коэффициент.
Плотность атмосферы на Марсе около 0.02 kg/m3
Скорость 3.5м/c
k считать сложно, скажем, вертолет имеет форму куба (k = 1).
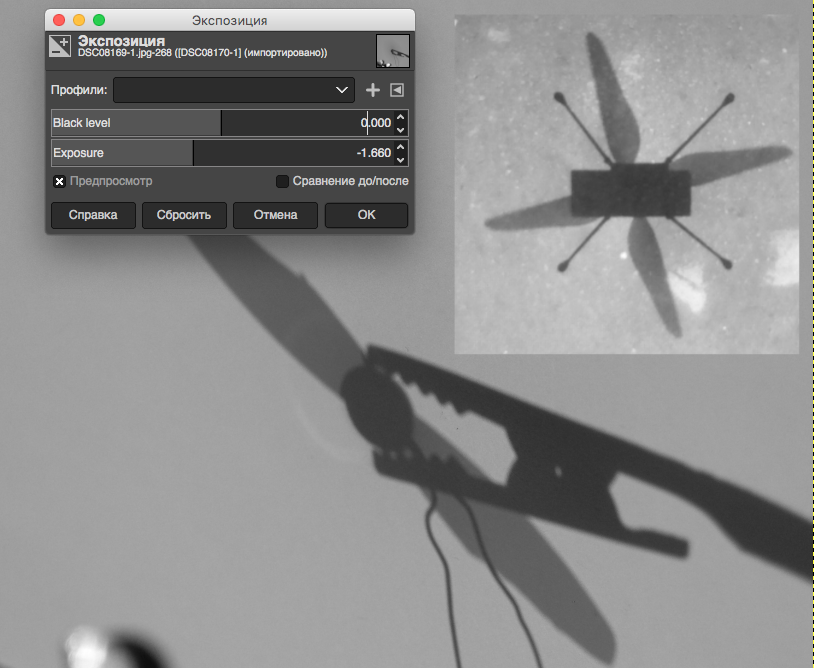
Осталось узнать площадь сечения. Это просто. Открываем 3д модельку и крутим ее до тех пор пока не будет похоже на на вертолет летящий прямо на нас:
Закрашиваем тень, потому что она темнее чем коробка вертолета, и двигаем белый маркер на гистограмме влево, чтобы он стал левее пика светлого фона:
Теперь гистограмма показывает количество пикселей темнее фона. Что, фактически, площадь сечения вертолета с этого ракурса. Правда она в пикселях. Но высота от дна до верхушки тут 100 пикселей, что дает 3.6мм на пиксель. Значит один пиксель это 13мм2, а 8051 пикселей - 104341мм2. Или 0.1м2.
(0.023.5^20.5*0.1)/2 = 0.01225 Ньютона
F = m*a
0.01225 = 1.8*a
a = 0.007м/с2
То-есть, за 27 секунд полета вертолет теряет всего 0.2 м/c скорости.
3. Вертолеты не отбрасывают тени
Вернемся к заглавной картинке (наконец-то!)

Четыре вещи на ней выглядят подозрительно:
Вертолет явно в воздухе, значит лопасти вращаются на 2500 RPM, а выглядят они очень четкими. Какая же там должна быть выдержка, диафрагма и ISO чтобы получить такую картинку с хорошей экспозицией и не утонуть в шумах и красивом бокэ?
Лопасти кажутся полупрозрачными. Странности добавляет и тень от ноги поверх тени пропеллера, которая прозрачной не выглядит.
Сверху лопасти более темные, чем снизу.
На переднем (более прямом) крае лопасти тень выглядит темнее. Причем на некоторых фото это заметно, а на других — нет:

Что за камера помогает Ingenuity ориентироваться на местности? Это OV7251. 640х480, отсутствие фильтра Байера, глобальный электронный затвор и до 120FPS в максимальном разрешении. Размер матрицы 1/7.5", а размер пикселя 3х3мкм. Эта камера бывает в двух исполнениях — для видимого света (с hotmirror, который отсекает ИК излучение), и для ближнего ИК (с полосовым фильтром на 830нм).
Надо заметить, что мне так и не удалось найти (или понять по фото) какая из двух версий камеры используется на Марсе. Далее я буду предполагать что обычная.
3.1 Гадание по фотографии
Попробуем оценить выдержку. Ищем какое-нибудь прямое место на лопасти и измеряем ширину полутени. Заодно, измеряем и ширину полутени от солнечной батарейки.

15 пикселей для винта и 10 пикселей для батарейки. Значит винт смазался вращением на 5 пикселей, что на таком расстоянии от оси вращения дает 1.5°. Но мы не учли искажения оптики: вещи на поверхности, ближе к краю кадра выглядят меньше, чем на самом деле. Пусть будет угол в ~2°, или 1/180 от полной окружности. Полную окружность лопасть проходит за 60000/2500RPM = 24мс, а 1/180 за 133мкс. Это и есть длительность выдержки. Ну или 1/7500, если вы фотограф.
Ошибка на 0.5° при измерении угла, дает примерно 33мкс разницы. К примеру если бы угол был в 1.5°, выдержка получилась бы 100мкс или 1/10000.
Теперь ISO. Хоть светочувствительность по ISO-12232 и не используется в этих камерах, её хорошо знать для сравнения с обычными фотоаппаратами. Когда камеры были большими, а экспонометры отдельными и дорогими, люди пользовались правилом «Sunny 16» чтобы подбирать выдержку. Правило гласит:
On a sunny day set aperture to f/16 and shutter speed to the [reciprocal of the] ISO film speed for a subject in direct sunlight
Сделаем поправку на то, что Марс дальше от Солнца и на него попадает в 2 раза меньше света. Делим 16 на и получаем Mars 11 rule. С диафрагмой f/11 и выдержкой 1/7500 матрице нужна будет чувствительность ISO 7500 чтобы получить нормальную экспозицию. Звучит как высокое и шумное ISO, но подождите.
Размер пикселя слишком мал, чтобы позволить диафрагму f/11: дифракционный предел размажет картинку.
Где d - минимальный размер пятна, N - диафрагма, а λ - длина волны света.
При диафрагме f/11 и λ = 550нм, d получается ~15мкм, целых 5 пикселей (размер пикселя у OV7251 - 3мкм).
Но на кадрах с камеры можно разглядеть отдельные детали в пару пикселей размером, значит d не сильно больше размера пикселя. Пусть будет как-раз 3мкм. Тогда:
N = 2.23
Чтобы дифракция не влияла на картинку, диаметр диафрагмы нужно увеличить в 11/2.23 = 5 раз. Поток света увеличится в = 25 раз, и ISO нужно уменьшить до 7500/25 = ISO 300. Хорошее, низкое ISO. И совсем не шумное.
Но хватит ли, при такой большой диафрагме, глубины резкости, чтобы без автофокуса снимать объекты на расстоянии от 15 сантиметров (когда вертолет приземлился) до десятков метров? Мы можем прикинуть гиперфокальное расстояние. Это расстояние H от камеры до точки фокуса, при котором в поле резкости попадает всё от H/2 до бесконечности:
Где H - гиперфокальное расстояние, f - фокусное расстояние объектива, N - диафрагменное число, а c - диаметр круга нерезкости. Круг нерезкости имеет тот-же смысл что и пятно в дифракционном пределе: мы не хотим чтобы он был больше пикселя.
Не хватает фокусного расстояния объектива. Но мы знаем, что размер матрицы 1/7.5", а угол зрения сильно больше 90° но меньше 180°. Пусть будет середина — 135°. Из справочных табличек (или опыта общения с зеркалками), можно узнать что для full frame матрицы угол в 130° получается при 10мм объективе. Диагональ full frame 1.7", а значит кроп-фактор для 1/7.5" матрицы 12.75. Фокусное расстояние получается 10/12.75 = 0.8мм.
Гиперфокальное расстояние:
H = 0.8^2/(2.23*0.003) = 95.6мм
0.003 - это 3мкм, размер круга нерезкости
Если сфокусировать объектив на 95мм, то резким будет всё от 47мм до бесконечности. Так что глубины резкости хватит с запасом.
Можно поискать модули с этой матрицей чтобы убедиться, что мы не сильно ошиблись. Вот модуль с фокусным расстоянием 1.3мм (и углом зрения в 86°), диафрагмой f/2.2 и фиксированным фокусом от 65mm до бесконечности. В целом сходится.
1/7500", ISO300, диафрагма f/2.2 и объектив с фокусным расстоянием 0.8mm. Странная конфигурация, если вы привыкли к большой фототехнике.
А если бы камера работала в ИК (λ = 850нм), то получилось бы: ISO120, диафрагма f/1.4 и гиперфокальное расстояние в 15 сантиметров.
3.2 Прозрачные лопасти
У этой части проблема с экспериментальными данными: проснувшись однажды утром после беспокойного сна, я обнаружил, что в доме нет ни одной камеры с глобальным электронным затвором, годной для переделки в ИК. Да и негодных нет. В конце мы компенсируем недостаток реальности численным моделированием (отвратительный код на питоне, да).
3.3 Потому, что прозрачные.
Самый очевидный вариант, объясняющий полупрозрачность теней, который приводят в каждом втором обсуждении этих фотографий: лопасти выглядят прозрачными потому-что они прозрачные. Логично.
Ведь OV7251 может работать в диапазоне ближнего ИК, где вещи выглядят неожиданно. Знаменитые примеры:
Тёмное, почти черное, небо. И чем дальше в ИК — тем темнее.
Яркие листья на деревьях, благодаря эффекту Вуда (не от слова "wood", а от слова Robert Wood)
Прозрачность разных пластиков и красителей
ИК-прозрачность тонкой одежды, приводящая к тому, что каждый выход инфракрасной камеры на массовый рынок сопровождается совершенно глупым скандалом и уходом камеры с рынка.
Может быть и с лопастями так же? Лопасти у Ingenuity карбоновые, и это хорошо: у меня есть такие-же. В этот раз не придется даже думать, хватаем пропеллер и смотрим на тень от солнца:
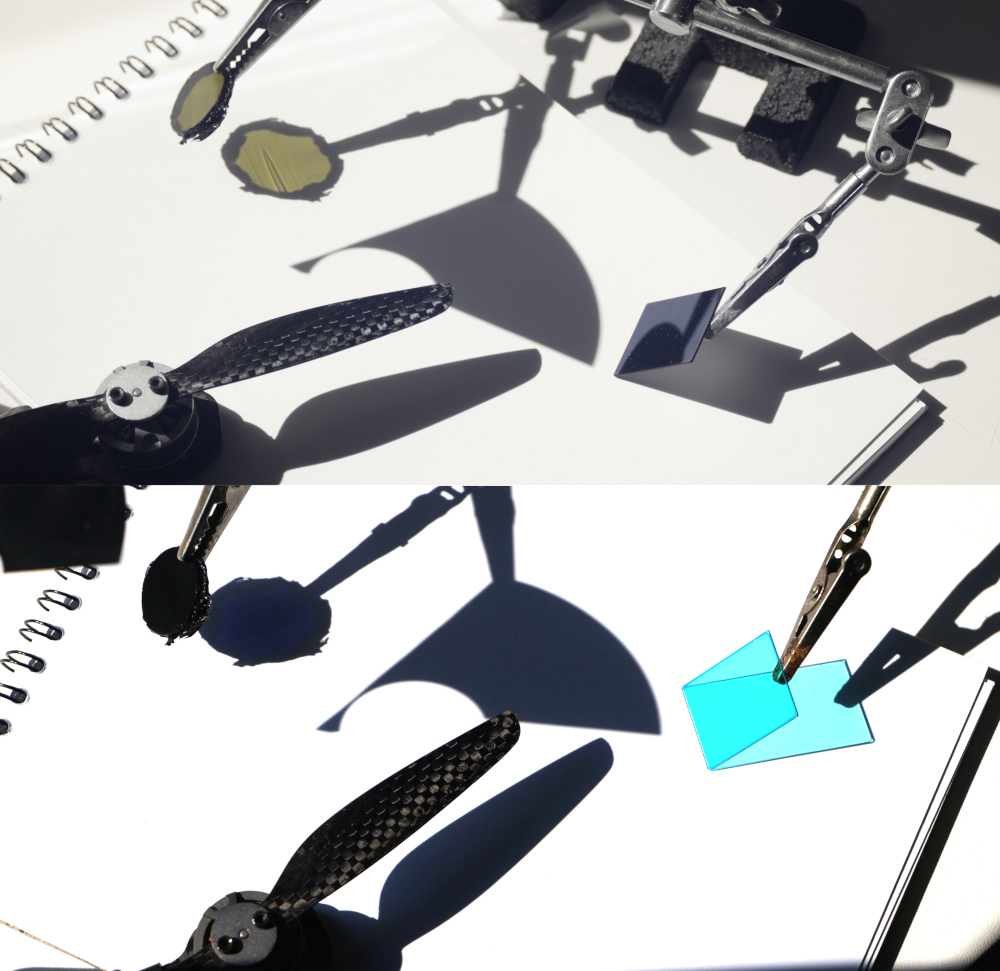
Рядом для сравнения светофильтр, прозрачный в ИК, hotmirror непрозрачный в ИК* но прозрачный в видимом свете и кусок дискеты. А снизу то же самое, но в видимом диапазоне.
Светлое пятно под hotmirror не от того, что оно пропускает ИК, а от того, что отражает вниз свет который попадает на его нижнюю сторону с яркой бумаги. Смотрите, как оно отражает держалку с круглым фильтром. Потому и "mirror".
Тень от пропеллера совершенно такой же яркости, как тень от мотора рядом:

3.4 Оффтоп 3: Инфракрасная фотография для бедных
А вот тень от дискеты чуть прозрачнее тени от держалки:

Дискета пропускает очень небольшое количество ИК и красного света. Она сойдет за lowpass-фильтр, если вы хотите попробовать ИК фотографию, а покупать нормальный фильтр не хотите.
Вот пара фоток на дискету:


Откуда берутся цвета на инфракрасных фото? Посмотрите на спектральную чувствительность фильтра Байера:

В серой части (как раз там работает ИК фотография) разные каналы всё еще дают разные значения, а значит есть цветовой контраст. Но чем дальше в ИК, тем меньше их различия. Начиная с 850нм, все каналы практически одинаковы. И действительно, чем дальше граница среза у lowpass фильтра, тем меньше насыщенность картинки:
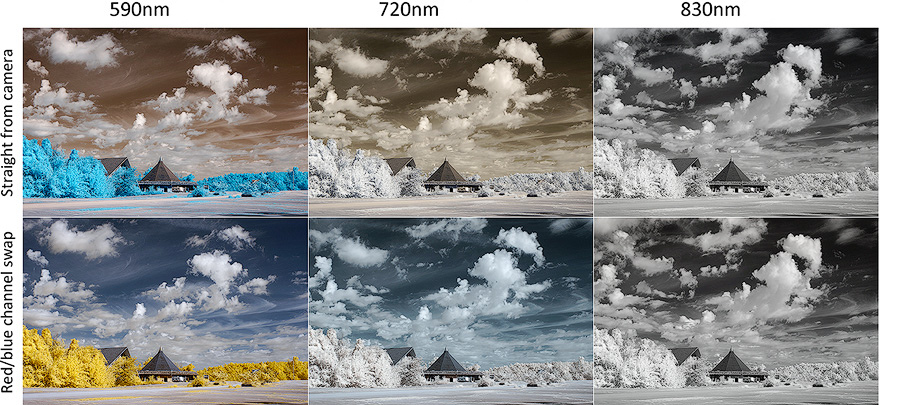
Конечно, производителей не волнуют характеристики фильтра Байера в ИК, поэтому цвета заметно меняются от камеры к камере.
В общем, карбоновые пропеллеры не относятся к вещам, предательски изменчивым в ИК. Приятно знать.
Ну и чтобы окончательно развеять сомнения, можно посмотреть вот эту фотографию:

Лопасти тут не вращаются и совершенно не прозрачны. А значит, дело в движении и таймингах.
3.5 Лопасти перемещаются во времени!
Помните эффект, возникающий при фотографировании со вспышкой чего-то шустрого? Рассмотрим фотографию комара:
Крылья получились четкими, но вокруг них смазанный след, потому что длительность вспышки гораздо меньше длительности выдержки. Но след полупрозрачный, потому что вспышка яркая и хорошо подсветила деревья.
Можно повторить то же самое с пропеллером:

Такой же эффект, как на фото Ingenuity! Но ведь у камеры вертолета нет вспышки, ему светит солнце. Откуда этот эффект получается у него?
Ответ скрывается в устройстве самой матрицы:
Данные считываются с CMOS матрицы построчно. Контроллер выбирает одну из строк, и АЦП через мультиплексор по очереди измеряет заряд на пикселях. Затем следующую.
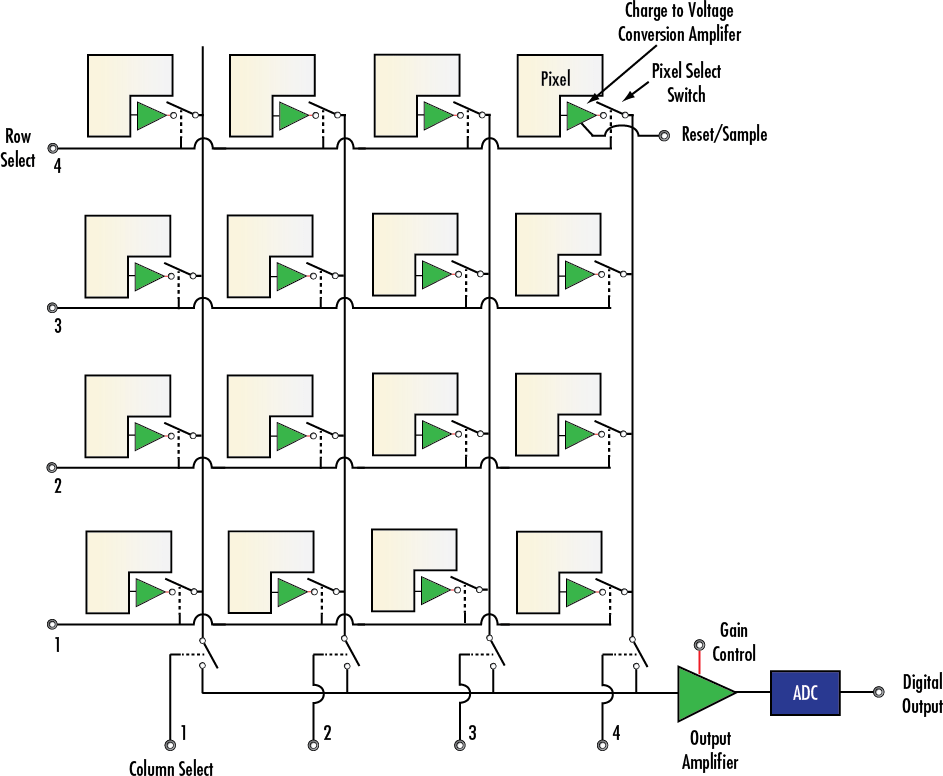
Процесс длится порядка миллисекунд, что сравнимо с длительностью выдержки или даже больше. Поэтому в классических цифровых фотокамерах, по завершении экспозиции матрица прикрывается от света механическим затвором.
А если механического затвора нет, можно экспонировать и считывать строки по отдельности. Тогда у вас не будет проблемы с тем, что другие строки ждут своей очереди под светом. Но будут другие проблемы: да, мы говорим о rolling shutter. Строки экспонируются в разное время, и объекты в кадре могут успеть переместиться.
Более сложной и дорогой альтернативой rolling shutter является global shutter. Тут вы экспонируете всю матрицу сразу, но по завершении экспозиции перемещаете накопленный пикселем заряд в защищенную от света область, называемую storage node.
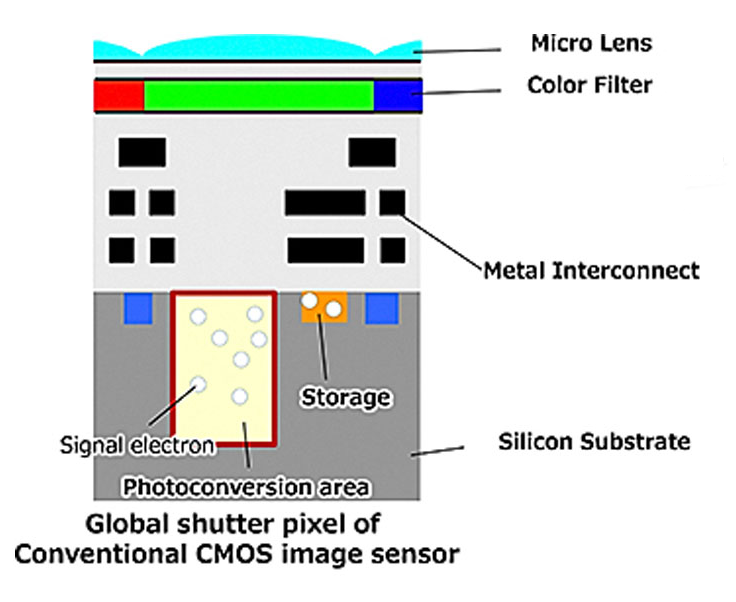
Она маленькая, находится вне фокуса микролинзы и прикрыта от света линиями управляющих сигналов, а то и отдельной крышечкой из металлизации. Перемещение зарядов со всех пикселей происходит одновременно, и уже после этого вы неспешно считываете заряды. Как-будто у вас механический затвор.
Вот только он не механический и не 100% эффективный. Крышка на storage node не может быть значительно больше самой storage node, и свет может под неё проникать за счет дифракции на всякой фигне вокруг. А еще электроны, выбитые фотонами, попавшими мимо фотодиода, могут долететь до storage node.

Эта нежелательная засветка при "закрытом" затворе называется Parasitic Light Sensitivity (PLS) и ужасно всех бесит уже много лет.
Пиксели будут засвечиваться, пока идет чтение, причем те которые считываются последними — засветятся больше всех. А если между завершением экспозиции и началом чтения есть пауза, то пиксели будут засвечиваться и в это время, но равномерно.
PLS, в различных статьях, как и другие специфичные вещи, выражается в чем угодно в зависимости от давности статьи и фазы луны на момент написания: Сначала это называли Shutter Efficiency и измеряли в процентах. 99% означает что закрытый затвор пропускает 1% света.
Когда отличать 99.98% от 99.99% стало слишком тяжело, ввели термин PLS ratio. Например 1/10000 означает что закрытый затвор пропускает в 10000 раз меньше света чем открытый. Иногда указывают 1/PLS, чтобы не писать "1/".
Но так-как писать 4-5 нулей довольно утомительно, PLS выражается еще и в децибелах, например -40dB = 1/10000. Или 1/PLS, чтобы не писать у децибелов минус.
Я же пойду еще дальше и буду говорить PLS, имея ввиду 1/PLS.
3.6 Попробуем оценить PLS у нашей камеры
Сколько времени занимает считывание кадра с матрицы? В даташите этого не написано, но можно примерно прикинуть из таймингов камеры:
На странице 31 указан System Clock в 48MHz. А на 20й странице — тайминги MIPI.

Полное время передачи одного фрейма (1) занимает 478848 тактов SysClock, или 10мс (что как раз дает 100 FPS). Но из этого времени только 445056 тактов (9.3мс), занимает передача самого фрейма. Потому что тайминги (2), (3), (5), (7) и (9) — не относятся к передаче полезных данных.
Можно убедиться, поделив 445056 на 928 (период передачи одного пакета) и получив 480 — количество строк сенсора. Значит в каждом пакете одна строка. А то, что из 928 тактов больше половины — пауза между пакетами, говорит о том, что строки действительно оцифровываются по ходу передачи. Так что ~9.3мс это время чтения сенсора.
Выдержка была ~133мкс, а значит, время чтения в 70 раз больше выдержки.
Можно вернуться к веселым экспериментам. Возьмем две фотографии тени от пропеллера: неподвижного и размазанного вращением.

Скомбинируем их в режиме Addition (попиксельное сложение яркости) и сравним с фотографией, где вертолет летит высоко над землей. Лопасти находятся примерно в центре кадра, так что отношение чтение/выдержка будет ~35.
Скажем, что фото с неподвижным винтом это идеальный затвор. А фото с размазанным - эффект от PLS. Тогда, если бы PLS была ровно 35, то простое сложение кадров дало бы такой-же эффект как у вертолета (экспозиция размытого кадра в 35 раз дольше, но сенсор в это время в 35 раз менее чувствительный):

Похоже? Да, но слишком прозрачно.
Покрутим экспозицию для слоя с размазанным пропеллером.
Ну вот, 1.66 ступени вниз и выглядит гораздо лучше. Это эквивалентно уменьшению светочувствительности в 2^1.66 = 3.17 раза. Значит, PLS примерно 35*3.17 ≈ 111.
Такое значение PLS кажется очень плохим по современным меркам. В работах 2018 и 2019 годов приводятся цифры на два порядка лучше для пикселей того же размера.

Даже в пресс-релизе 2019 года, где Omnivision анонсирует новую версию этой камеры - OV7251-1B, заявлена эффективность в 99.96% (PLS = 2500).
Но на всяческих видео и пресс-конференциях команда Ingenuity рассказывала, что работа над вертолетом велась 5-6 лет. В 2014 году вышел Snapdragon 801 который стоит в Ingenuity и моем телефоне, в 2014-же году вышла первая версия OV7251. И графики от 2013 показывают, что в те давние времена, PLS была довольно печальной:

Обратите внимание, что это график для пикселя размером 3.75мкм, а на OV7251 — 3мкм. И PLS очень стремительно ухудшается с уменьшением размера пикселя: примерно в 5 раз на 10% уменьшения размера. Между 3.75 и 3 — 20% разницы, что дает ухудшение в 10 раз и PLS порядка 100. Сходится.
3.7 Откуда на фото градиент яркости?

Потому, что разные строки ждут очереди на считывание разное время. Верхняя строка считывается первой, и PLS на неё не влияет: верхняя часть кадра самая темная. Нижняя строка считывается последней, а до этого засвечивается все 9.3мс. Средняя — в течении 4.65мс.
Попробуем получить PLS еще одним способом (с расстоянием до ровера ведь сработало!). Возьмем все фотографии c навигационной камеры и слепим из них одну:
convert -evaluate-sequence mean ./HELI_NAV/*.png ./heli_nav_mean.pngПолучилась вот такая красота:

Видно виньетирование от большой диафрагмы и широкого угла, ногу, пыль на стекле, еще ногу, и тень от вертолета по центру.
Теперь возьмем вертикальную полосу откуда-нибудь из центра кадра и построим график яркости:
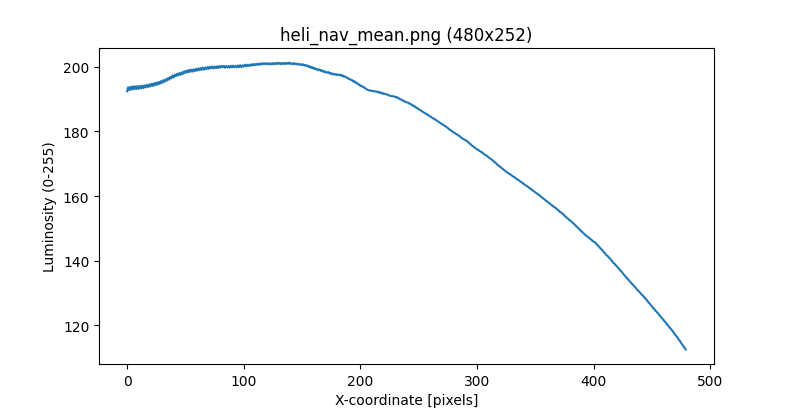
В центральной части (где не мешают искажения оптики и тень от вертолета) график более-менее линейный.
За 80 пикселей (360..280) яркость изменилась со 158 до 180. Или на (180-158)/158 ≈ 14%. 80 пикселей это 1/6 от полной высоты картинки, а значит PLS = 70/6/0.14 ≈ 83.
Можно снова взять что-нибудь среднее между 83 и 111: PLS ≈ 100 (или 99% эффективности затвора)
В данном случае эффект от PLS был так заметен только потому, что у нас есть быстро вращающиеся лопасти. Без них эффект выражался бы только в вертикальном градиенте яркости, который легко правится программно (с потерей динамического диапазона, но это не страшно).
3.8 Передний край
С градиентом понятно, но почему передний край на лопасти темнее, чем остальная часть?

В эксперименте со сложением двух фотографий пропеллера, мы упустили важную деталь: там пропеллер вращался быстро и успевал сделать много оборотов за время экспозиции, потому размазывался в аккуратный диск. Но с Ingenuity всё не так: за 9.3мс чтения лопасть проходит 140°. И это за полное время считывания. Для средних строк это будет уже 70°.
А если пропеллер не успевает сделать даже пол-оборота, тень от второй лопасти не дойдет до места, где была первая в момент начала экспозиции. А значит, тень не размажет в ровный круг, и то место откуда начала двигаться лопасть, будет светлее.
А то, что это заметно не на всех кадрах, объясняется вторым винтом: на 3 кадре угол между винтами около 22.5° и сектора, которые проходят лопасти за время засветки, полностью пересекаются, выравнивая яркость. А вот на двух первых кадрах угол >70° и винты не успевают долететь.

3.9 Ground truth
Можно ли проверить все эти домыслы, кроме как разглядывая фотографии с Ingenuity?
Я уже говорил, что подходящих камер у меня 0. Да и купить такую сейчас будет сложно — за 6 лет характеристики улучшились на порядки. К счастью, у нас есть ютуб, на котором иногда попадаются хорошие видео. Вот сегодняшнее хорошее видео:
(в комментах можно понаблюдать, как я упорно ничего не понимаю)
Это точно такая же камера как на Ingenuity, снимающая быстро вращающийся пропеллер. Идеально!

И на видео отлично видно, что лопасти выглядят прозрачными. Гораздо более прозрачными, чем тени от вертолета, но тут и выдержка короче (77 а не 133), и сцена гораздо более контрастная.
3.10 Симуляция неэффективного затвора
Это всё еще не выглядит убедительно. Да, мы знаем что у глобального затвора есть засветка, и примерно представляем её величину для OV7251. Но хочется проверить.

Я набросал контуры винта и коробки с ногами, и нагуглил текстуру песочка.
Загружаем всё это безобразие в Pillow:
blade1 = Image.open("blade.png").convert("RGBA")
blade2 = blade1.transpose(Image.FLIP_TOP_BOTTOM)
box = Image.open("box.png").convert("RGBA")
background = Image.open("sand.jpg").convert("RGBA")
w,h = blade1.size
center = (w//2, h//2)
Trow = 19Trow здесь — время оцифровки одной строки изображения в микросекундах. Оно же — минимальное время экспозиции. Оно же — шаг времени для нашей симуляции.
Функция для экспонирования кадра за один Trow:
def single_exposure(cx, cy, scale, a1, a2, shadow_alpha, gain):
shape = blade1.rotate(a1, center=center)
t = blade2.rotate(a2, center=center)
shape.paste(t, (0,0), t)
shape.paste(box, (0,0), box)
if scale != 1:
shape = shape.resize((int(w*scale), int(h*scale)), Image.NEAREST)
data = np.array(shape)
r, g, b, a = data.T
black = (r == 0) & (g == 0) & (b == 0) & (a == 255)
data[..., :][black.T] = (0, 0, 0, shadow_alpha*255)
shape = Image.fromarray(data)
bg = background.copy()
bg.paste(shape, (int(w/2 - w*scale/2 + cx), int(h/2 - h*scale/2 + cy)), shape)
return np.array(bg.convert("L")) * gainТут я безуспешно пытаюсь совладать с Pillow, вращаю лопасти на углы a1 и a2, собираю лопасти и коробку вместе, масштабирую и перемещаю, делаю их немного прозрачными (чтобы тень не была совсем черной) и прилепляю на песочек. В конце умножаю всё на gain — коэффициент, который поможет нам в итоге получать нормальную экспозицию.
Как живой!
Теперь, функция, собирающая кадр. Мы можем разделить всё происходящее на три этапа:
Сама экспозиция: кадр с выдержкой длительностью exposure_us, за время которой лопасти успевают немного сдвинуться.
Ожидание перед считыванием. Теперь длительность hold_us, и учитывается PLS - кадр во много раз темнее.
Считывание кадра. Тут вещи становятся хитрыми. Первая строка проэкспонируется в течение 1 лишнего Trow, а потом прочитается. 480я строка - в течение 480 Trow, причем в это время положение лопастей будет заметно меняться. Так что для кадра в 480 строк нам придется наплодить 480 фреймов для того чтобы брать с них строки для симуляции PLS.
def construct_frame(exposure_us, RPM, PLS, a1, a2, readout_us=h*Trow,
shadow_alpha=0.6, gain=None, hold_us=0, cy=0, cx=0, scale=1):
degrees_per_trow = RPM/60E6*360*Trow
exposure_trows = exposure_us//Trow
hold_trows = hold_us//Trow
kReadout = readout_us/h/Trow
if gain==None:
gain = 1/(exposure_trows + hold_trows/PLS + (h/2)/PLS*kReadout) * gain_correction
sensor = np.zeros((w,h))
if exposure_us != 0:
print("Building Base image")
for i in progressbar(range(exposure_trows)):
sensor += single_exposure(cx, cy, scale, a1, a2, shadow_alpha, gain)
a1 += degrees_per_trow
a2 -= degrees_per_trow
if hold_trows != 0:
print("Building Hold image")
for i in progressbar(range(hold_trows)):
sensor += single_exposure(cx, cy, scale, a1, a2, shadow_alpha, gain) / PLS
a1 += degrees_per_trow
a2 -= degrees_per_trow
if readout_us != 0:
print("Applying PLS frames")
PLS_frames = []
for line in progressbar(range(h)):
PLS_frames.append(single_exposure(cx, cy, scale, a1 ,a2, shadow_alpha, gain) / PLS * kReadout)
for t in range(-1, -line-1, -1):
sensor[line,:] += PLS_frames[t][line,:]
a1 += degrees_per_trow * kReadout
a2 -= degrees_per_trow * kReadout
return Image.fromarray(np.uint8(np.clip(sensor, a_min=0, a_max=255)), 'L')readout_us и, получаемый из него, kReadout нужны чтобы симулировать разную скорость считывания. А устанавливая exposure_us, readout_us или hold_us в 0 можно отключать соответствующие компоненты кадра.
sensor - массив в котором мы суммируем все экспозиции. Как и в реальности, каждая часть процесса просто насыпает заряд в его ячейки.
gain выбирается так, чтобы в середине кадра (h/2) экспозиция была нормальной.
Проверим, как этот ужас работает:
construct_frame(exposure_us=133, RPM=2537, PLS=100,
readout_us=9272, a1=-35, a2=90).save("test.png")
Чтобы было удобнее перебирать разные параметры, я написал обертку, которой можно задавать варианты для каждого из них. Посмотрим, как размывает лопасти при разной выдержке (без учета PLS):
Выдержка меняется от 19 до 12000 микросекунд
Интересно, что размывает их не просто в диск, а с паттерном из 4х светлых полос, который отмечает места пересечения лопастей при вращении. В любой точке за время экспозиции пролетает 2 лопасти (в разные стороны), но в точках пересечения — они пролетают одновременно, перекрывая свет на в 2 раза меньшее время.
Вот этот эффект на нашем соосном пропеллере из спичек и желудей
Интересно, что паттерн поворачивается, когда скорости винтов не совпадают:
Теперь, посмотрим на эффект от PLS. Если взять PLS=100, то разное время чтения сенсора будет выглядеть вот так:
Время чтения сенсора меняется от 19 до 24000 миллисекунд
Видно, как при увеличении соотношения Чтение/Экспозиция, PLS всё больше влияет на картинку. Если присмотреться, то можно увидеть размазанный след от того, что за время чтения лопасти успели повернуться:

В верхней части они успели повернуться меньше, чем в нижней. Потому что нижние строки засвечивались дольше.
Скажем, что длительность чтения была 9.3мс и посмотрим, что будет если менять PLS:
На низких PLS градиент практически пересвечивает нижнюю часть кадра, а кроме прозрачных винтов заметны и следы от их движения за время чтения. На PLS порядка 100, градиент выравнивается до приличного уровня. Интересно, что даже на PLS 2500 можно разглядеть разницу в тенях между винтом и ногами.
Мы забыли про паузу между экспозицией и чтением. Скажем, что PLS=100, выдержка 133мкс, а чтение 9.3мс. Тогда:
Пауза при неизменной PLS и времени чтения, влияет на общую яркость, при этом уменьшая градиент.
А вот так выглядит отдельно эффект от PLS при разном времени чтения:
Я выбрал несколько кадров с вертолета и попробовал воспроизвести их.




Выглядит похоже. Хотя симуляция кажется несколько темнее (PLS слишком большой?) и с менее заметными градиентами на передней части лопастей (выдержка должна быть по-меньше?). Но в целом это вполне убедительно доказывает, что параметры примерно верные.
4. Постскриптум
Вот так, с помощью спичек, желудей и школьного учебника геометрии, можно изучать космическую технику не вставая с дивана.
Если бы мне 10 лет назад сказали, что на Марсе будет летать вертолет на солнечной батарейке, а марсоход будет снимать его на видео со звуком, я бы не поверил по целому набору причин.
Но вот мы здесь. Ingenuity, который создавался как proof-of-concept и не был обременен излишней консервативностью при выборе оборудования, таскает камеру с самым большим разрешением из всех что были на поверхности Марса и кучу легкой и компактной industrial-grade электроники.

На вертолете нет научного оборудования, кроме камер. Но зато он может моментально слетать за пол-километра и пофоткать со всех сторон очередной очень интересный камень.
Каждый новый полет сложнее предыдущего, но если МиМи не решит сделать бочку, нас ждет еще много материала от маленького марсианского вертолета.

Нет, вы только послушайте какая энергия у человека!
5. Ссылкография
https://github.com/dcoder-mm/heli-shadow-supplementary
Скрипты, видео и всякое прочее из статьи.
https://github.com/dcoder-mm/HELI_NAV
https://github.com/dcoder-mm/HELI_RTE_JPEG
Архивы фотографий с камер Ingenuity. Я прикручу автообновление, если будет не лень.
Марс и вертолеты
Mars Helicopter Technology Demonstrator PDF от вертолета. Довольно подробное описание железа, конструкции и испытаний от главного инженера проекта.
https://mars.nasa.gov/mars2020/multimedia/raw-images/ Всем известный каталог фотографий с марсохода и вертолета (архивы выше — оттуда).
https://forum.nasaspaceflight.com/index.php?topic=53277.0 API для него
https://archives.esac.esa.int/psa Чуть менее известный каталог от Европейского Космического Агентства, содержащий не только фото но и данные с инструментов. Там можно посмотреть, как Philae закатился в яму на комете и помер :(
https://mars.nasa.gov/technology/helicopter/status/298/what-were-learning-about-ingenuitys-flight-control-and-aerodynamic-performance/ Статья про то как летает вертолет на Марсе. С графиками и интересными подробностями.
https://mars.nasa.gov/technology/helicopter/status/ Статус апдейты вертолета.
https://en.wikipedia.org/wiki/Ingenuity_(helicopter)#List_of_flights Внезапно, википедия. Там отличная сводная таблица полетов с параметрами и описаниями.
https://mars.nasa.gov/rss/api/?feed=weather&category=mars2020&feedtype=json А это json с актуальной погодой на Марсе. Понятия не имею зачем, но сам факт!
Камеры
Даташит на OV7750, потому что она почти такая-же как OV7251. https://cdn.datasheetspdf.com/pdf-down/O/V/7/OV7750-OmniVision.pdf
https://datasheet.octopart.com/OV09716-B77Y-OE-Z-Omnivision-Technologies-datasheet-138897320.pdf Бумажка от OV9716. Да, тоже не та камера. Зато тут много подробностей которые общие для всех этих камер от Omnivision.
https://sst.semiconductor-digest.com/2014/09/global-shutter-image-sensors/ Сравнение разных архитектур глобальных затворов
https://www.imagesensors.org/Past%20Workshops/2013%20Workshop/2013%20Papers/Slides/12-1_Velichko_SLIDES.pdf Тоже сравнение разных архитектур, но в виде слайдов с картинками (отсюда был утащен график для PLS 2013 года)
https://www.imaging.org/Site/PDFS/Conferences/ElectroincImaging/EI2018/EI2017-IMSE-CIS_pixel_design_optimization_Boyd_v2.pdf И еще одна аналогичная презентация, от Omnivision
https://www.researchgate.net/publication/223133651_CMOS_Image_Sensors_for_High_Speed_Applications Хорошая, хоть и старая (2009) статья про высокоскоростные CMOS матрицы и их проблемы.
Комментарии (212)







anDron315
30.07.2021 22:34вертолеты не на Марсе жужжат а в пустыне в алабаме

dcoder_mm Автор
30.07.2021 22:34+6Н-но ведь первая часть как раз об этом!
Вы скажете, что вертолет в 1.5 раза меньше чем нам заявляют, да?
0serg
31.07.2021 10:40+1И звук еще надо подправить, а то для Земли слишком быстрое вращение пропеллера. И экспозицию тоже, чтобы снимки правильно вышли. И еще десяток вещей, наверное…

Drakosh
30.07.2021 22:44+11Поразительно, сколько всего можно вытянуть из фоток и звука. И с хорошей точностью. Наконец увидел ответ насчет отсутствия размытия лопастей, а то уже пытались приписать к конспирологам.
dcoder_mm Автор
31.07.2021 08:46+5а то уже пытались приписать к конспирологам
Ну их можно понять: совсем не очевидно, что на вертолете стоит камера семилетней давности, и что тогда электронные затворы были настолько хуже.

aivs
30.07.2021 22:57-28Так были америкосы на Луне?

Andy_Big
30.07.2021 23:42+27Не были, потому что и самой Америки нет, это выдумка тайного мирового правительства под патронажем рептилоидов.
dcoder_mm Автор
30.07.2021 23:46+27Дайте Зеленому Коту ракету, он вам всё покажет

Vsevo10d
31.07.2021 13:27+9Извините меня пожалуйста за оффтоп, но я вам плюсанул, а потом мой мозг сломался:
спойлер

dcoder_mm Автор
01.08.2021 02:21+9Да новый интерфейс хабра это чудо веб-технологий, удивляюсь как он вообще работает






dmitrytheman
31.07.2021 00:00по фото, где два движка с оранжевыми пропеллерами, обращаем внимание на закрутку лопастей, они просто раздувают воздух из "центра" в разные стороны. Это никак не вертолет с соосными винтами. Я сейчас вижу плоховато (после капель), но выглядит именно так. Если ошибаюсь, поправьте.
dcoder_mm Автор
31.07.2021 05:12+2А как вы это определили не зная направление вращения моторов? Всё правильно они дуют, я проверял. Но могу сказать, что даже если они раздувают воздух из центра, спектр получается таким-же. А вот если дуют друг-на-друга, то лишнего шума становится больше
dmitrytheman
31.07.2021 20:54+1винты зеркально симметричны. если нижний движок должен крутить по часовой судя по профилю винта и поток на наблюдателя. И судя по профилю "верхнего" винта он тоже должен по часовой, иначе просто турбулентность будет создавать. а раз зеркальные винты в одну сторону, то и потлк из центра в разные стороны

lorc
01.08.2021 00:47Не совсем понятно почему винты должны создавать турбулентность. На всех соосных схемах винты зеркально-симметричны и вращаются в разные стороны.
dcoder_mm Автор
01.08.2021 08:44Тут дело не во вращении, а в том что я поставил не тот винт и он, вращаясь в неправильную сторону, действительно скорее шумел чем дул. Теперь я сделал еще хуже (перевернул винт), и дуть стало сильнее. Поправил статью.
vibpelm
06.08.2021 12:05Реально возьмите винт в руки и переверните. Что получится? Ничего не изменится. Как был винт условно "правым" , так и останется "правым", и дуть будет в ту же сторону, пока не поменяете направление вращения. Это азбука! Не вводите народ в заблуждение.
dcoder_mm Автор
06.08.2021 12:16Окей, у меня получилась немного неправильная формулировка. Я не имел ввиду, что перевернутый винт дует в другую сторону, а имел ввиду, что переворачивание винта, который крутился в нужную мне сторону, но тягу не создавал, позволило получить тягу.
Убрал из текста про переворачивание.
dcoder_mm Автор
01.08.2021 02:33А вы правы! Один из винтов действительно создает гораздо меньше тяги. Не прям "только турбулентность", но разница очень большая.
Это не должно повлиять на BPF, но вот спектр может стать немного другим. Попробую найти правильный винт и проверить.
dcoder_mm Автор
01.08.2021 08:53Перевернул в итоге один из винтов, стало лучше. Спектр на вид изменился не сильно (поправил там картинки)

Tarakanator
02.08.2021 10:41А про луну серия будет?
dcoder_mm Автор
02.08.2021 11:15А там вроде и нету ничего настолько разрывающего шаблон, как прозрачные лопасти. Разве что пересказывать байки про то, как роняли РИТЭГ, прыгали в высоту по-приколу, и стреляли из мортиры.



Ermit
31.07.2021 02:10+6Так и Америки нет, ее придумали, чтобы РФ была в кольце врагов, а так, земной диск заканчивается границами Краснодарского края... кто там был, тот знает...

geher
31.07.2021 13:27+2СенсацияКатастрофа!!! Земной диск крошится по краям. Я точно был южнее Краснодарского края, а теперь там ничего нет!

vanxant
31.07.2021 03:22+42Это не торт, это бомба!
Спасибо, товарищ! Я прям как будто вернулся в молодость, когда на хабре не было переводов, гнуснохостингов и репостов ядзена, а из редакторов мы посмеивались только над Ализаром!

sergopl
31.07.2021 09:29+5Обалденный анализ, реально не знал что СТОЛЬКО информации можно вытащить из несколько фото...





ABConymous
31.07.2021 10:49+4Вот так космонавтика и популяризуется, когда любой человек может проанализировать фото/аудио/etc и получить кучу информации!

OnvogSGN
31.07.2021 10:58+1Вы серьёзно думаете, что любой человек будет этим заниматься? :) А не смотреть готовые новости про космос или, что ещё хуже, обзоры всяких недоблогеров?
ABConymous
31.07.2021 11:36+2Конечно нет, я не говорю, что любой человек будет этим заниматься, большинство даже интересующихся будет просто смотреть новости. Любой человек может это сделать, есть открытые данные, а дальше зависит от увлечённости.
dcoder_mm Автор
31.07.2021 11:43Открытые данные были всегда, но раньше это были в основном не самые качественные фото (мы говорим про цифру) и данные с инструментов. А теперь это более понятные простому человеку вещи: гора фоток с хорошим разрешением (там 13Мп цветная камера на вертолете!) и видео.
А вертолет еще и носится туда-сюда, за ним интересно наблюдать


VioletGiraffe
31.07.2021 11:24Если бы мне 10 лет назад сказали, что на Марсе будет летать вертолет на солнечной батарейке, а марсоход будет снимать его на видео со звуком, я бы не поверил по целому набору причин.
В 2011? Я бы поверил :) Расскажите, пожалуйста, про этот ряд причин.dcoder_mm Автор
31.07.2021 11:35+2Тут надо сделать поправку на то, что в 2011 году я не сильно интересовался космосом и наверное начал сомневаться бы даже в самой возможности полета вертолета на Марсе. Ну и такие вещи как "видео со звуком" и "всякие электрические леталки с камерами" у меня почему-то ассоциировались с тем этапом освоения планеты, когда там уже бегают люди.

SIMPLicity
31.07.2021 11:38"Тут вертолет быстро разгоняется до 200 метров в секунду, и пролетает мимо ровера..."
200 м/с это же 720 км/ч ... Точне не лишний ноль?
PS За статью спасибо,- обязательно вернусь и дочитаю...

mSnus
31.07.2021 13:17Простите за дурацкий вопрос: я думал, светодиод -- это который излучает свет, а тот, который принимает -- тот фотодиод. Я ошибался?
dcoder_mm Автор
31.07.2021 14:00+10Вы правы. Но их делают из одного теста (полупроводниковый pn переход), поэтому светодиоды могут генерировать ток, под ярким светом, а фотодиоды - светится в инфракрасном (я вам даже сфоткаю, когда темно станет). Обычные диоды в стеклянном корпусе тоже светятся в ИК.
А в посте я использовал именно светодиод (да и вообще делал тахометр из подручных средств) чтобы показать самый простой и доступный способ
mSnus
31.07.2021 14:09Спасибо, очень интересно! Я когда-то использовал динамик в качестве микрофона, оказывается, со светом так тоже можно.
dcoder_mm Автор
31.07.2021 14:18+1Моторы еще (но они те-же динамики: катушка да магнит) можно использовать как генераторы.

ksr123
31.07.2021 16:49Извините, но перед «же» дефис не ставится. В статье много такого.
dcoder_mm Автор
31.07.2021 16:56+4Да, мне уже накидали в личку этого.
Но беда в том, что WYSIWYG редактор хабра на таких длинных постах превращается в очень занимательное слайд-шоу с временем реакции порядка секунд. Не знаю, как они этого добились (ни в процессор, ни в память он, кажется, не упирается), видимо сами сделали себе боттлнек и залезли в него. В общем я очень не хочу лишний раз это трогать и внесу все правки за один заход чуть позже

bolk
31.07.2021 15:49+4Советская электробритва превращалась в динамик, если воткнуть её в радиоточку )
dcoder_mm Автор
31.07.2021 16:18+6Но превращался ли советский динамик в электробритву, если воткнуть его в 220В, вот в чем вопрос
bolk
31.07.2021 16:19+4Эксперименты в детстве показали, что он превращался в испорченный динамик.
dcoder_mm Автор
01.08.2021 02:36+1А мои эксперименты в детстве показали что тоненький проводок превращается в хлопок и вспышку света. Потом я пихать вещи в розетку уже опасался (даже те, которые для этого и предназначены)

Firsto
01.08.2021 08:33+2Я так старый домашний телефон взорвал, после чего месяц посещал кружок радиолюбителей.

AVX
01.08.2021 13:55+1Я в детстве сделал вилку из деталей конструктора "33 модели". Мощно, надëжно, и размер как раз подошëл. Ну и проверил... Бахнуло знатно, выгорела розетка, оплавилась вилка, свет отрубился, а я улетел на пару метров.
ClearAirTurbulence
02.08.2021 15:39Я как-то в детстве из любопытства велофару с маленькой лампой, ЕМНИП, на 2.5В, в 220 подключал. Потом долго разглядывал ее — спираль испарилась, и все стеклышко подверглось равномерной металлизации изнутри.
Пробки, что удобно, были автоматические, так что никто не узнал об эксперименте :)

begin_end
31.07.2021 16:28Хм, тогда в ИК должны светиться и переходы германиевых/кремниевых транзисторов, а также солнечные батареи. Интересно бы проверить...

engine9
31.07.2021 16:40+2Таки да, светятся солнечные элементы: https://www.youtube.com/watch?v=s9JZpPtHS1w

Demiurge067
04.08.2021 14:13Транзисторы не только светятся, но и успешно вырабатывают электричество. Особенно хорошо это получается у германиевых типа МП39-МП42.
dcoder_mm Автор
31.07.2021 18:35+7Обещанное инфракрасное диодобесие (я не дождался темноты).
Извращения с pn-переходом
Герои сегодняшнего выпуска:
Слева направо: какой-то фотодиод, какие-то самые обычные диоды, какой-то обычный инфракрасный 5мм светодиод, и бумажка. Но бумажка не участвует в фестивале.
Камера с lowpass фильтром на 720нм.
Контрольный снимок с ИК светодиодом на 20мА:

20mA f/2.8 1" ISO100 20mA f/2.8 1" ISO100
Фотодиод:

60mA f/2.8 1" ISO800 60mA f/2.8 1" ISO800
Обратите внимание что то через него — целых 60мА, а ISO в 8 раз выше. И всё равно он еле светится (но хоть как-то)
И наконец, то ради чего я всё это затеял: обычный диод

400mA f/2.8 5" ISO800 400mA f/2.8 5" ISO800

Ток 400мА (в 20 раз выше чем у светодиода), и выдержка целых 5 секунд. Желтая засветка сбоку — от дисплея БП, который я старательно пытаюсь прикрыть рукой.
В общем, оно светится, но настолько слабо что приходится превышать токи и выкручивать параметры съемки чтобы что-то разглядеть.






engine9
31.07.2021 16:38+9Хочу уснуть и проснуться в мире где все конспирологи будут как автор. Браво, я в восторге!
Настоящая цифровая криминалистика, потрясающая глубина проработки материала.Я сам увлекаюсь реконструкцией экстерьера зданий по фотографиям и это очень увлекательно.
dcoder_mm Автор
31.07.2021 18:41Я ведь эту шутку про конспирологию взял потому, что где-то давно видел тред в котором с маниакальной тщательностью измеряли пиксели на снимках с Луны и пытались доказать что снимки поддельные. Странные у людей развлечения: отвергать ground truth, которая позволяла проверить свои расчеты.
А в реконструкции зданий по фото используется какой-нибудь хитрый machine learning? Насколько точно можно автоматически реконструировать экстерьер по небольшому количеству фото (т.е. не point cloud с дрона, а например фотографии туристов)?
engine9
01.08.2021 09:42+1Всё проще, сопоставляю перспективу при помощи контрольных точек и подгоняю полученную камеру к 3Д сцене. Фотограмметрию тоже использую, но не специализированный софт который потом модели делает, а модуль в программе blender, который по трекам отмеченных точек реконструирует положение камеры в пространстве. А затем моделирую ручками, так получается менее точно, но чистая и легковесная модель.

Sercius
02.08.2021 14:39Влезу в ваш диалог. Коммерческие решения, типа Reality Capture, позволяют по сравнительно небольшому количеству фото достаточно точно реконструировать интерьеры. Что там под капотом конкретно у них не знаю, но у остальных различные вариации фотограмметрических алгоритмов.

AllexIn
31.07.2021 20:07+4Не понял голосования. Даже если земля плоская - у неё всё равно может быть радиус, если она диск.
dcoder_mm Автор
01.08.2021 02:38+1Надо было сделать два варианта с плоской землей, да. Не подумал.
Но в оправдание скажу, что опрос я добавил только потому хабр предложил мне его добавить (А отказываться было-бы некультурно!)

ZyXI
02.08.2021 01:33+1Вообще‐то не совсем так: для того, чтобы у земли был радиус ей достаточно всего лишь иметь точную верхнюю грань всевозможных расстояний между её точками. Впрочем, я не удивлюсь, если кто‐то утверждает, что земля плоская и бесконечная.

vvzvlad
31.07.2021 21:10+2Офигеть. Вот тебе и видео плохого качества, и пара фоток 640х480.
Мне вот даже неуютно стало от осознания, что дай мне в руки эти же фотки и видео — и я из них смогу вытащить информации на порядок меньше.
А вот у Sony ILCE-9 (https://prophotos.ru/reviews/19553-sony-ilce-9-nedelya-s-ekspertom/3) есть некий электронный затвор, который не подвержен rolling shutter, как они заявляют. Это тоже global shutter?dcoder_mm Автор
01.08.2021 03:09+1Ладно еще картинки и видео (я много раз видел как люди на них пиксели измеряют и делают далеко идущие выводы), но вот настолько хороший график доплера мне совсем шаблон порвал. Я ожидал что там будет, в лучшем случае "о, частота поменялась, значит вертолет летит".
Да, они в a9 сделали Global Shutter. А недавно вообще анонсировали здоровенную матрицу на 128Мп с глобальным затвором. Интересно, что у a9 размер пикселя почти 6мкм, а вот у этой уже 3.5мкм.
Я кстати был уверен что глобальный затвор у них и в более ранних камерах есть, но оказывается "silent shutter" это rolling.
Из других смешных вещей которые sony пихает в камеры: electronic variable ND filter сделанный из ЖК экрана
vvzvlad
22.08.2021 22:14Помучал представителей сони на фотофесте, все в один голос утверждают, что в девятке нет глобального затвора, а есть очень быстрое считывание с матрицы, и зная как, поймать эффект rolling shutter на фото вполне возможно. Но утверждают, что по сравнению с eos R, на котором бесшумный затвор слабоюзабелен даже просто «на ходу» (после чего я прекратил его использовать), просто небо и земля.
dcoder_mm Автор
22.08.2021 22:56Хм, похоже и правда. Я видимо еще до выхода A9II прочитал где-то жареные слухи, о том что в ней будет глобальный затвор.
зная как
Быстро мигать лампочкой

BMXer_V
31.07.2021 21:19+1Обалденно! Вот это мозги и увлечённость у человека! Мне б такие! Ладно, буду утешать тем, что я хотя бы всё прочитанное понял и получил от него наслаждение

nickolas059
31.07.2021 21:21+5Сергей Попов в одной из своих лекций приводил аналогию про работу астрофизиков. Он говорил, что в темной комнате человек ударился головой об стену и по эху учёные пытаются определить объем головы. Может неточно, но что-то в этом духе. Браво Вам!
dcoder_mm Автор
01.08.2021 08:46+4Кстати да, астрофизика это отличный пример высасывания максимума данных из 2,5 пикселей. И Сергей Борисович хорошо это показывает в своих лекциях.

VT100
31.07.2021 22:15+3Люто плюсую. Так держать!
NSFW"Воткнём пылающий факел знаний в тёмную задницу невежества!"
P.S. К опросу надо бы добавить вариант "Начал обдумывать"?
dcoder_mm Автор
01.08.2021 08:51+6Поправил всякие мелочи. Спасибо людям, которые присылали очепятки в личку (особенно @maxzhurkin, который прислал приблизительно 65536 неправильных дефисов).
Отдельное спасибо @dmitrytheman за то что увидел неправильное расположение винтов на моем самопальном соосном пропеллере и защищал свою точку зрения, когда я пытался чото-там возражать. Поправил в статье.

isden
01.08.2021 10:30+1Вы знаете как измерить радиус Земли, не выходя из дома?
А так таки как его посчитать не выходя из дома?
Вспоминается очень старый "греческий" способ, но нужно как минимум две точки на поверхности.dcoder_mm Автор
01.08.2021 10:55+2Это вариант греческого способа, но с поправкой на то, что в день весеннего/осеннего равноденствия солнце находится ровно над экватором, и нужно знать расстояние от себя до экватора (что делает способ не таким красивым)

korva
01.08.2021 12:57Вроде есть ещё вариант с тенью земли на луне.
dcoder_mm Автор
01.08.2021 13:07Но тут надо знать расстояние до луны (а я не могу придумать как его измерить, не зная радиус земли) и ждать гораздо больше чем пол года
isden
01.08.2021 15:01а я не могу придумать как его измерить, не зная радиус земли
Насколько помню, зная массы обоих тел и период обращения/орбиту, можно посчитать. Но это тоже не так красиво :)
Плюс еще можно напрямую измерить отражением радиосигнала.dcoder_mm Автор
01.08.2021 17:37К черту массы, это не красиво. А вот с радиосигналом интересно. EME, пишут, работает на мощностях уже в 100Вт с направленной антенной. А у всякого радио мощность гораздо выше. Можно ли поймать отражение от Луны условного "радио маяк" с его сигналами точного времени?
isden
01.08.2021 18:32Читал где-то, что в районе 70-80 радиолюбители игрались со связью через отражение от Луны на частоте 144МГц. И можно просто тупо считать время от отправки до приема эха.
dcoder_mm Автор
01.08.2021 18:52Ну это же нужен передатчик, и лицензия радиолюбителя. А чтобы поймать радио Маяк — RTL-SDR свисток и LNA
isden
01.08.2021 19:17Я так подозреваю, что FM станции в основном "светят" в плоскости поверхности. Может быть побочно что-то и вверх идет, и можно попробовать поискать направленной антенной.
Можно кстати и не обязательно Маяк. Возможно что-то сильнее светит вверх. Ловим самое сильное эхо и прямой сигнал, и считаем задержку.dcoder_mm Автор
01.08.2021 19:26Но ведь земля круглая, и поверхность расположена по-разному. На ±90° по долготе, параллель к поверхности уже будет для вас смотреть прямо в космос (см. Рис. 1). Там конечно гораздо толще атмосфера, да и ионосфера под острым углом получается, но вдруг сработает
Рис. 1

isden
01.08.2021 19:31Может быть, но расстояние заметно больше будет, и рельеф поверхности еще.
В общем надо собирать большую тарелку и пробовать :)dcoder_mm Автор
01.08.2021 19:42Не, расстояние будет больше всего на радиус Земли. Это 6к километров, а до Луны 380к. 1.6%
isden
02.08.2021 09:57Квадрат расстояния. Лишние 6к км — это таки 6к км.
Плюс в этом случае мы не сможем принять прямой сигнал от станции, она должна быть в пределах прямой видимости.
dcoder_mm Автор
02.08.2021 11:16Квадрат 1.6% это 2.5%, всё еще терпимо.
А прямая видимость не нужна, если по радио передают сигнал точного времени в начале часа, например
isden
02.08.2021 11:24А прямая видимость не нужна, если по радио передают сигнал точного времени в начале часа, например
Там погрешность плюс-минус лапоть. Для бытового применения сойдет, а вот для точных измерений уже нет.
dcoder_mm Автор
02.08.2021 11:36А, да? Я где-то слышал давно что оно очень точное, но не проверял. Там 2.5 сек должно быть туда-обратно, так что если радио не врет больше чем на 0.25 сек, то можно уже с точностью в 10% оценить расстояние
isden
02.08.2021 12:24+1Я в интернетах читал, что заявленная точность — доли секунды (не уточнялось, правда, сколько именно). А на практике народ пишет что секунды выходят.
Demiurge067
05.08.2021 11:06+3Это должна быть очень большая тарелка...
Чтобы получить значимый Ку такой тарелки на верхней частоте (108 МГц), например, 20 dBi, диаметр тарелки должен быть 12 метров. Или антенная решетка.
Но что такое 20 dBi, если сигнал до Луны затухает на 183 дБ (только туда!)?
Какая часть отразится - непонятно (Котр=0,1, но это при угле падения 90 градусов).
И на столько же сигнал ослабнет по дороге "домой"... Нетривиальная задача.
Погуглил, применительно к ветке обсуждения, поделюсь. https://www.rlocman.ru/review/article.html?di=334789
isden
05.08.2021 11:11Да, вот я как раз читал давно про эпичные волновые каналы для связи через отражение.
Demiurge067
05.08.2021 10:48Они действительно светят в горизонтальной плоскости, Энергоэффективность никто не отменял. Причем диаграммы направленности в горизонтали производители пытаются сделать как можно уже - применяются антенные решетки в виде массива дипольных антенн.
Вопрос приема УКВ/FM больше упирается в ионосферу,которая отражает радиоволны. Особенно - приходящие под острым углом.
isden
05.08.2021 10:52УКВ же вроде должны нормально проходить и эти эффекты ближе к КВ проявляются?
UPD: гугл подсказывает, что отражение начинает происходить где-то в районе 30 МГцDemiurge067
05.08.2021 17:17Давно, в детстве/юности, я выписывал журнал Радио и читал про эти экзотические виды связи). Даже, в последствии, получив категорию, и имея поддержку единомышленников на коллективной КВ-радиостанции я не рискнул собирать систему - понимая, насколько все непросто.
Да, с ростом частоты, эффект отражения ослабевает, но давайте вспомним, что существуют и неплохо работают аналоговые и цифровые тропосферные связные системы, разрабатываемые как у нас, так и в США. А они работают именно на принципе отражения ЭМВ от слоёв заряженных частиц в тропосфере (отсюда и название).
Для тропосферы есть несколько окошек в районе ДМВ, сантиметровых волн и были попытки использования миллиметровых волн, но безуспешно.
Впрочем это всё оффтоп)))




iStorm
01.08.2021 11:46Подошли очень серьезно и с разных сторон. Спасибо - очень интересно.
С первого раза даже не смог дочитать, отложил на вдумчивое прочтение ))



Aquahawk
02.08.2021 10:56Вот это настоящий ответ, почему лопасти прозрачные, а не то, что мне в комментах пытались написать. Спасибо.
dcoder_mm Автор
02.08.2021 11:17А расскажите, что вам отвечали? Что они полупрозрачные потому что полупрозрачные?
Aquahawk
02.08.2021 11:40+1https://habr.com/ru/news/t/561808/comments/#comment_23129984 вот что отвечали. Да про сенсор там сказали, но понимание пришло только с вашей статьёй.

arxz
02.08.2021 13:27+1Вы знаете как измерить радиус Земли, не выходя из дома?
Можно ли измерить радиус плоской земли, не выходя из дома?


usa_habro_user
03.08.2021 22:03"Зачётная" статья, и прекрасная работа! По прочтении, "перемотал" вверх, думая найти, как обычно под статьями такого качества, слово "перевод", но не нашел. Как там "в этих ваших интернетах" пишут? "Аффтар жжот, пеши исчо!"

Serzsh
08.08.2021 22:11Модели "Валькирии" из фильма "Аватар" отлично летают. Это говорит о реальности Пандоры? Нет, это говорит о развитии компьютерной техники и тщательной проработке деталей :-)
dcoder_mm Автор
08.08.2021 22:13+2Вы написали комментарий в интернете. Это говорит о реальности Вас? Нет, это говорит о развитии компьютерной техники и тщательной настройке модели GPT-3 :-)
Serzsh
09.08.2021 01:08-1Ответ немного некорректен. Я не ставлю под сомнение Вашу реальность, как автора статьи. Просто, если у Вас есть программы для анализа видео, то и у создателей видео они тоже есть. Вполне возможно, что у создателей видео есть и прототип вертолета в уменьшенном масштабе. Да и видео на несколько минут - это не полнометражный фильм - можно и постараться. Сам факт функционирования такого агрегата в разреженной, но, как ни странно, очень пыльной марсианской атмосфере с жуткими перепадами температур вызывает сильные сомнения. По легенде, у марсохода есть изотопный источник для подогрева, а у вертолета - нет. А как летать на литиевых аккумуляторах в мороз, знаю не понаслышке - дохнут они от мороза. Впрочем, факт удержания огромного количества пыли в настолько разреженной атмосфере, что впору говорить о ее почти полном отсутствии, который смогли зафиксировать только американские спускаемые аппараты, также, вызывает сомнение. А, ведь, именно благодаря пыли марсианские пейзажи так поразительно похожи на земные. Это, даже, если не упоминать о сусликах и других посторонних предметах на архивных "марсианских" фото НАСА.
0serg
09.08.2021 07:47+2Когда человек пишет про «сусликов на марсианских фото» мне вседа хочется спросить, что ж никто и никогда этих «сусликов» не показывает. Впечатляет и то что Вы верите в то что американцы создавая фото, видео и аудиоподделки учли такие ньюансы как меньший угловой размер Солнца, но а то же время не заметили сусликов на фото?
Сам факт функционирования такого агрегата в разреженной, но, как ни странно, очень пыльной марсианской атмосфере с жуткими перепадами температур вызывает сильные сомнения. По легенде, у марсохода есть изотопный источник для подогрева, а у вертолета — нет. А как летать на литиевых аккумуляторах в мороз, знаю не понаслышке — дохнут они от мороза.
Ну так это повод почитать про то как устроен вертолетик а не сидеть и сомневаться не имея материала для анализа. Основная идея: аккумулятор на вертолете теплоизолирован и примерно половину собранной электроэнергии вертолет тратит на его подогрев (и подогрев электроники)Serzsh
09.08.2021 10:03-2Что касается сусликов - это архивные фото НАСА. Подробнее эти моменты разобраны в ролике: https://www.youtube.com/watch?v=7fr8LLvZUdM&t=1084s, фото с марсианским суликом 16:49
Что касается видео полета вертолета - да, проработано тщательно. За исключением детали, которую Вы проигнорировали - цвет неба. Во время пылевой бури - согласен, рассеивание света будет, но, для поднятия пыли должна быть турбулентность возле поверхности, то есть, ветер, и достаточно сильный, исключающий возможность полетов. При отсутствии турбулентности в разреженной атмосфере пыль быстро осядет и небо станет черным.
Что касается подогрева за счет солнечной батареи - подумайте сами, насколько можно гарантировать ее работоспособность при наличии пыли, поднимаемой винтами и оседающей на горизонтальных поверхностях случайным образом. Это игра в русскую рулетку. При том, что размер изотопного подогревателя в сторону уменьшения не ограничен - изотопные батарейки для кардиостимуляторов - это давно не новинка. Если пыль засыпала батарею, то, при наличии изотопного подогрева, можно дождаться, когда ветер сдует пыль или заряжать аккумуляторы несколько марсианских суток. При отсутствии изотопного подогрева - неблагоприятное стечение погодных условий и вертолет промерз. Космическую технику так не делают - это не детское техническое творчество.
Возможно, эти аргументы покажутся Вам неубедительными. В таком случае - подумайте, согласятся ли вообще спонсоры запускать дорогостоящее оборудование в космос без большого количества проверок. Большие барокамеры для создания разреженной атмосферы у НАСА есть, облегчить вертолет, для полета в условиях земной гравитации - вообще не проблема. Но, где испытания? Самая рекламообильная страна в мире засекречивает свои прорывные разработки, которые затем транслирует на весь мир? Вы серьезно в это верите?
dcoder_mm Автор
09.08.2021 11:15+4По последнему абзацу: они довольно долго только и занимались тем что учились летать в барокамере на земле используя облегченную модель вертолета. Если вы не можете это найти, значит вам не очень и интересно (буквально один запрос в гугл, или полистать PDF на вертолет, которая у меня в конце статьи в ссылках).
0serg
09.08.2021 11:58+1Номер у фото какой? Проверка первоисточников — это основа основ, а в Вашем случае первоисточник — это отнюдь не НАСА а некий мужик на видео обещающий что он взял свою картинку с сайта НАСА. Будет номер — можно будет что-то обсуждать. Например взять предыдущие и следующие картинки в серии и посмотреть на то же самое место в другое время и под другим углом. Велика вероятность что «суслик» будет там же, но под другим углом окажется камнем, такое бывало не раз.
При отсутствии турбулентности в разреженной атмосфере пыль быстро осядет и небо станет черным.
Я так не думаю. Скорость оседания пыли зависит от ее размеров. Достаточно мелкая пыль может долго летать даже в разреженной атмосфере. Из земных примеров можно вспомнить извержение Кракатоа, забросившего пыль в стратосферу где она летала потом над земным шариком целый год.При отсутствии изотопного подогрева — неблагоприятное стечение погодных условий и вертолет промерз. Космическую технику так не делают — это не детское техническое творчество.
Вертолет был опытным образцом и рассчитывался на 1 месяц работы. За это время вероятность быть «засыпанным пылью» мала, серьезные бури способные это сделать случаются на Марсе нечасто
Про барокамеру уже написали.
dcoder_mm Автор
09.08.2021 11:07+1Да и видео на несколько минут - это не полнометражный фильм - можно и постараться.
Но там ведь еще почти 1000 фотографий* с навигационной камеры, и сотня с цветной (с 13Мп разрешением). Если бы создание каждой фотографии было сопряжено с такими трудностями и риском раскрытия заговора из-за суслика, они бы просто не ставили цветную камеру на вертолет. Да и на марсоходе не было бы столько камер: Curiosity (или MER? Я забыл) чуть было не отправили на Марс без большой цветной камеры из-за недостатка финансирования, и разработчики её буквально из своего кармана оплачивали. Зачем так делать, если это всё хитры заговор? Кроме того, много космических аппаратов по стоимости сравнимых с марсоходами, летает вообще без камер.
* Если вам интересно: тут я собрал в удобном для скачивания виде (Зеленая кнопка Code -> Download Zip) фотографии с навигационной камеры вертолета и с цветной камеры. Можете поискать сусликов (я нашел только землянку дяди Джо)
Про работу вертолета вам уже ответили (подъемную силу можно посчитать, зная площадь винтов и обороты).
Небо на марсе кстати довольно черное, если смотреть в зенит (раз, два) и на фото горизонта видно, как оно стремительно темнеет.
VT100
11.08.2021 22:19+1Это, даже, если не упоминать о сусликах и других посторонних предметах на архивных "марсианских" фото НАСА.
"Ложечки нашлись… но осадочек — остался". Так?
https://habr.com/ru/post/383691/
Serzsh
09.08.2021 01:18-1Не держится пыль в настолько разреженной атмосфере при отсутствии пыльной бури, а небо без пыли на Марсе будет черным - плотность марсианской атмосферы и рассеивание соответствуют земной атмосфере на высоте 29 км. А если небо не черное, то, значит, пыльная буря и о полетах можно даже не мечтать.
Serzsh
09.08.2021 19:35+1Фото с сусликом: https://www.jpl.nasa.gov/images/rocknest-from-sol-52-location расположение фрагмента 0,049 ширины кадра от левой границы, 0,413 высоты от нижней границы. На других фото этот участок местности отсутствует - сравнивать не с чем. Но, это не единственное фото - в ролике их много и с указанием их номера.
Вертолету не нужна пыльная буря для того, чтобы засыпать пылью неподвижную горизонтальную панель над винтами: https://helico-russia.ru/upload/medialibrary/e76/e76f01ace5f24114476cc493eec2e71b.jpg Впрочем, даже посадки на наклонную поверхность достаточно, чтобы угол падения солнечных лучей и мощность, вырабатываемая батареей изменились. О какой "половине мощности на подогрев" идет речь?
Небо на марсе кстати довольно черное, если смотреть в зенит (раз, два) и на фото горизонта видно, как оно стремительно темнеет.
Спасибо за ссылку. Очень убедительная картинка, если не знать, что двигатели "небесного крана" в этот момент должны работать. Топливо для двигателей "небесного крана" НДМГ+ТА - на таком же топливе работает первая ступень РН "Протон". Посмотрите на старт "Протона" днем: https://www.youtube.com/watch?v=cMJIHoUJXdw старт, разворот по тангажу и на 14:14 с расстояния в несколько километров мы видим, как сияют шесть сопел. А у "небесного крана" двигатели холодные, хотя и повернуты соплами на камеру, факелы пририсуют позднее.
dcoder_mm Автор
09.08.2021 19:51Топливо для двигателей "небесного крана" НДМГ+ТА
Неправильно.
Остальные аргументы у вас, к сожалению, на том-же уровне. Вернитесь, когда найдете в себе силы потратить немного времени на фактчекинг

artemerschow
10.08.2021 01:37Простите, но вы реально считаете, что это настоящий живой суслик?
В таком случае, моя рабочая гипотеза, что на Марс попадают ожившие детские рисунки.
artemerschow
10.08.2021 01:47Да там ещё лиса выглядывает!
Череп виднеется. Даже два
Что творится то!..
Serzsh
10.08.2021 02:55+1Нет, суслик не там )))
0,413 высоты от нижнего края - это чуть ниже середины высоты кадра, а 0,049 ширины от левого края - это почти левая кромка

dcoder_mm Автор
10.08.2021 08:03+1Ну потому что надо было пиксельные координаты давать, а не какие-то странные дроби (вы их линеечкой измеряли?). Всё еще не вижу суслика. Вижу осколки камней




Serzsh
09.08.2021 21:00Спасибо за подсказку. Я действительно ошибся. В двигателях "небесного крана" применяется не горение, а каталитическое разложение гидразина. Но, картина не сильно меняется:
"Гидразин в присутствии катализаторов разлагается с выделением тепла и образованием газообразных продуктов, в которые входят аммиак, азот и водород [50]. Так, из 1 кг гидразина образуется 2,9 м чистого неконденсированного газа с температурой примерно 1380° С, который создает удельную тягу примерно 2400 (Н.с)/кг." (Энциклопедия по машиностроению XXL)
При разложении гидразина, пористый катализатор так же нагревается до температуры продуктов реакции, как и стенки сопла в критическом сечении. Для сравнения, температура плавления чугуна 1350 С и он ярко светится даже днем. А что с двигателями? Куда делось свечение на фоне "почти черного" марсианского неба? Да, в процессе расширения температура продуктов распада снижается, и стенки соплового насадка на выходе светиться не будут, но, раскаленный катализатор и критическое сечение "смотрят " в камеру. Да и снижение температуры - вещь относительная - молекулы на выходе соплового насадка движутся в одном направлении и слабо взаимодействуют с боковыми стенками, но, при столкновении с частицами пыли, кинетическая энергия моментально превратится в тепло и раскаленная пыль будет "сиять", что и рисуют в анимации.
dcoder_mm Автор
09.08.2021 21:25К сожалению вы снова не хотите потратить время на работу с источниками.
За 5 минут гуглится pdf с описанием конструкции и результатов тестирования того самого двигателя skycrane. Возможно, она вам поможет. Я не буду приводить ссылку, потренируйтесь.
Serzsh
09.08.2021 22:40+1Так сами и посмотрите, как выглядит работающий MR80B с одним соплом: http://matthewwturner.com/uah/IPT2008_summer/baselines/LOW%20Files/Payload/Downloads/AIAA-2007-5481-979.pdf Figure 11—MLE Engine Demonstrates Pulse Mode Operation at Sea Level. Понятно, что продукты разложения гидразина гореть в марсианской атмосфере не будут, но, обратите внимание, как светятся наружная поверхность двигателя и сопло в районе критики. И это при ярком свете, а не на Марсе. Вместо фото лучше рассматривать видео: https://www.youtube.com/watch?v=kVsTIfl843s начиная с 2:31 На видео хорошо видно, как движется пыль под двигателями - нет выхлопа, ни холодного ни раскаленного, есть внешний боковой источник ветра.
dcoder_mm Автор
09.08.2021 23:28Мне кажется вы уже издеваетесь, поэтому предлагаю на этом и закончить.
Можете еще посмотреть больше одной картинки из этой PDF и обратить внимание на то, чем двигатель на стенде отличается от двигателя на skycrane. И перестаньте смотреть видео на ютубе, а смотрите оригиналы фото. Можете собрать цвета сами или найти в том-же архиве цветные фреймы из видео, и убедиться что та часть камеры сгорания, которая видна, светится красным.
Serzsh
09.08.2021 23:54Определитесь, что для вас важнее - истина или чувство собственной важности. Если считаете, что человек ошибается - просто, объясните, в чем ошибка. Фразы из серии "я знаю, но не скажу" придают некую пикантность вашей позиции.
dcoder_mm Автор
10.08.2021 00:12+1Я считаю что человек должен сам убедиться что он не ошибается, перед тем как опровергать общепринятые вещи. У меня вообще нет никакой позиции, какая тут может быть позиция-то? Небо голубое, вода мокрая, марсоходы на Марсе.
Но давайте попробуем еще раз.
Figure 11 это тест проводимый в режиме, отличном от режима skycrane, и мы не знаем ничего об этом тесте (возможно двигатель тестировали на износ).
Мы не знаем яркий ли там свет (тест явно в помещении, и судя по тому что металл ярко светится розовым - не такой уж свет и яркий).
Температура в камере, в обычном режиме работы не 1300 а 850-950.
Вот тут видно кусок самого двигателя под защитным кожухом, и он явно горячий. (примите во внимание комментарии про температуру и яркость света и то, что к тому моменту, как ровер опускается на тросах, большая часть топлива уже потрачена и двигатели работают на низкой мощности)
Не очень понимаю что вам не понравилось с пылью на видео: она движется ровно так как должна двигаться (представьте куда, относительно кадра приходятся струи от двигателей). А самого выхлопа и не должно быть видно.
Serzsh
10.08.2021 02:00+1Хорошо, давайте попробуем. На Figure 8 отображено изменение температуры катализатора во времени. Катализатор выполнен в виде цилиндров с каналами. Такая конструкция позволяет передать тепло от внешней поверхности цилиндра, омываемой нагретыми продуктами распада к внутренней, омываемой сравнительно холодным гидразином с целью повышения времени работоспособности катализатора. Никаких возражений.
Возражения возникают в другом месте - внешний корпус и сопло. В отличие от катализатора, внешний корпус и критика омываются только продуктами распада. Под кожухом охлаждение минимально, да и разреженная атмосфера - хороший теплоизолятор. Также следует учесть, что корпус двигателя и сопло максимально облегчены, что влечет за собой снижение толщины стенки и времени прогрева до температуры омывающих продуктов распада.
Температура продуктов распада практически сразу достигает 1380 С - это необходимо для сохранения удельного импульса и снижения погрешностей при расчете длительности импульсов тяги. Если температура будет ниже, то и скорость истечения будет ниже, что ведет к перерасходу топлива и недопустимо для космических аппаратов.
Итого, катализатор разогревается до 1500 F (815 С) за счет охлаждения гидразином. Но, корпус двигателя и сопло не охлаждаются и греются почти до температуры продуктов распада, которыми интенсивно омываются, а это почти 1380 С.
Далее, по освещенности на Figure 11.Температуру горения гидразина в воздухе не нашел, но на фото факел почти белый. При этом, дополнительное освещение позволяет избежать засветки кадра светом факела. И на фоне свечения факела, свечение корпуса и сопла отлично видно.
Теперь о марсианском фото. Можно говорить о каком - либо свечении корпуса из под теплозащитного кожуха, но, сложно определить, свечение это или блик от поверхности сопла. А вот на фоне внутренней поверхности сопла, свечение внутренней поверхности критического сечения должно быть очень четко видно, тем более, что материал сопла - практически зеркало. При работе двигателя сопла не могут не светить, пусть, даже, розовым или красным. Но, увы, сопла черные.
Далее, по свечению пыли, попадающей в выхлоп. Продукты распада вылетают из сопла со скоростью около 2400 м/с - эта скорость, практически, и есть скорость теплового движения молекул продуктов распада гидразина при температуре 1380 С. Торможение молекул, разогнанных до такой скорости о частицы пыли приводит к нагреву частиц пыли до исходной температуры - около 1300 С. Похожую картину, только, ярче, можно наблюдать при работе автогена в запыленном помещении. Но, увы, мультипликаторы вынуждены пририсовывать несуществующие факелы.
dcoder_mm Автор
10.08.2021 07:52+1Итого, катализатор разогревается до 1500 F (815 С) за счет охлаждения гидразином. Но, корпус двигателя и сопло не охлаждаются и греются почти до температуры продуктов распада, которыми интенсивно омываются, а это почти 1380 С.
Термопары с которых взяты эти 1500°F расположены на внешних стенках камеры сгорания (из описания Figure 8). Причем тут "катализатор нагревается до 1500 F"?
но, сложно определить, свечение это или блик от поверхности сопла
У вас есть еще много фото, чтобы определиться: https://mars.nasa.gov/mars2020/multimedia/raw-images/?af=EDL_RUCAM#raw-images (можете нажать там show movie frames, чтобы увидеть несколько цветных фреймов, но лучше соберите цвета сами). Обратите внимание, что оно не просто светлое, а красное.
Если вас не убедит ни одна из фотографий, можно взять какой-нибудь Blender и попробовать смоделировать такой же блик от солнца. Положение солнца известно, свойства материалов наверняка можно прикинуть по разным фото, где двигатели видно лучше.
Продукты распада вылетают из сопла со скоростью около 2400 м/с
Нет, скорость 2100 даже на максимальной тяге. На этапе спуска ровера на землю, тяга уже меньше 50%. Подкрепите рассуждения про свечение пыли какими-то расчетами (все необходимые цифры вроде-бы есть), без них сложно о чем-то говорить.
Кстати, а о какой анимации с факелами вы все время говорите? Если это что-то из пресс-релизов, для широкой аудитории, то их решение вполне понятно: люди привыкли видеть огонь из ракет, и пустые сопла сломают им мозг. А еще факелами хорошо показывать что двигатели сейчас работают
dcoder_mm Автор
10.08.2021 08:33Кстати, если вы так уверены в своей правоте, и можете приводить аргументы в свою пользу, почему бы вам не написать об этом пост?
Возьмите несколько ключевых моментов (ну вот двигатели эти, и невозможность полета вертолета на марсе) и разберите их. С расчетами, графиками и ссылками на источники.
Я не пытаюсь издеваться. Вас, конечно-же, заминусуют, но суть не в этом. Суть в том, что (я уверен) если вы достаточно тщательно подойдете к проблеме и поиску материала, то никакого поста и не будет, потому что в процессе исследования вы обнаружите, что никакой проблемы и нет
Serzsh
10.08.2021 17:33+1Спасибо, что помогли разобраться! По катализатору ввело в заблуждение название Figure 8. Catalyst Bed Temperature Distribution
На цветных фреймах действительно видно свечение корпусов двигателей и отраженное свечение на внутренней поверхности сопел.
Со свечением пыли будет проблематично обосновать - слишком много неизвестных параметров.
О невозможности полета вертолета я не говорил. Как ни странно, но летать в условиях марсианской атмосферы и гравитации может большинство доступных в свободной продаже электрических моделей вертолетов.
Вполне возможно, что это инерция после множества кино- и фото-ляпов с лунной эпопеей.
И еще, удивляет низкая степень надежности применяемых технических решений, начиная от самой идеи спуска массивного марсохода на тросах под реактивным "квадриком" (точнее, октакоптером). Реально - совершенно необоснованное решение, зато, очень эффектное. Мой технический опыт просто кричит, что такие решения нежизнеспособны - это просто показуха для рекламы. Я бы проталкивал рекламу такого технического решения с целью дезинформации конкурентов. Поэтому и придираюсь к фото и видеоматериалам. Увы, получается, необоснованно, в плане фото и видео цепляться не к чему. Остается лишь иррациональное ощущение обмана без доказательств.
Еще раз, спасибо за помощь и терпение.
dcoder_mm Автор
10.08.2021 19:23Со свечением пыли будет проблематично обосновать - слишком много неизвестных параметров.
Почему? Скажите, что температура вокруг 240K (-33°C), давление 650 Па, скорость потока на выходе из сопла 1000-2100м/c, температура потока на выходе 202K* (ваш пример с автогеном немного не работает), давление на выходе 3кПа. Скажите, что пыль имеет какой-нибудь размер и сделана из оксида кремния (или из чего там делают пыль на Марсе, не знаю?). И посчитайте, можно ли столкновениями молекул газа с пылью нагреть её до заметного свечения.
*- https://www.researchgate.net/publication/274623278_Thruster_Plume_Surface_Interactions_Applications_for_Spacecraft_Landings_on_Planetary_Bodies (стр 5, Table 1)
О невозможности полета вертолета я не говорил
Ну мы же начали разговор о двигателях после того как вы сказали, что на марсе недостаточно света для солнечной батарейки.
летать в условиях марсианской атмосферы и гравитации может большинство доступных в свободной продаже электрических моделей вертолетов
У них точно есть запас по подъемной силе в 25 раз (соотношение плотностей атмосфер и сил тяжести)?
после множества кино- и фото-ляпов с лунной эпопеей.
Ну вот вы, теперь, помня о том, как много можно упустить если подходить к вопросу предвзято, можете пересмотреть ваши любимые лунные ляпы. Уверен, они тоже перестанут таковыми быть.
удивляет низкая степень надежности применяемых технических решений, начиная от самой идеи спуска массивного марсохода на тросах под реактивным "квадриком"
Почему? Тормозить двигателями и зависать на них — не проблема. Всё что садилось на Луну — садилось именно так. Во время спуска ровера двигатели работают на низкой мощности, так что в случае выхода из строя одного, можно отбалансировать другими.
Реально - совершенно необоснованное решение
Я плохо помню, но кажется там была идея в том, что инача достаточно аккуратно посадить такую громадину с тонким научным оборудованием, не добавляя еще кучу веса, было невозможно. Кажется об этом писал Rob Manning или Emily Lakdawalla в книгах про Curiosity.
Мой технический опыт просто кричит, что такие решения нежизнеспособны
Ну вот про двигатели ваш опыт тоже кричал, а вышло как вышло
Я бы проталкивал рекламу такого технического решения с целью дезинформации конкурентов
Ну то есть вы хотите сказать, что они разрабатывали, строили и испытывали skycrane в надежде на то что кто-то, абсолютно не думая, построит то же самое? При том что по-вашему, даже вы способны заметить, что оно не надежное. Вы считаете себя умнее тех, кого NASA собирается дезинформировать?
Serzsh
10.08.2021 23:45Ну мы же начали разговор о двигателях после того как вы сказали, что на марсе недостаточно света для солнечной батарейки.
Я сказал о том, что литий - ионные аккумуляторы плохо переносят мороз.
Вы сказали, что половина мощности солнечной панели тратится на подогрев аккумуляторов и электроники.
У меня возникло недопонимание: на какую половину мощности можно рассчитывать от источника, чья мощность зависит от степени запыленности и угла наклона поверхности?
У них точно есть запас по подъемной силе в 25 раз (соотношение плотностей атмосфер и сил тяжести)?
А зачем 25 кратный запас? Если на обычный соосник - электричку с бесколлекторыми движками поставить метровые лопасти с тихоходным профилем, увеличив ометаемую площадь и КПД винта, но, потеряв пилотажные характеристики, снять декоративный фюзеляж и лишние аккумуляторы, снизив время полета до 5 минут - для Марса сойдет.
dcoder_mm Автор
11.08.2021 00:01+1на какую половину мощности можно рассчитывать от источника, чья мощность зависит от степени запыленности и угла наклона поверхности?
Не понимаю в чем проблема? Угол наклона не меняется сильно, потому что вертолет не садится на склоны. И что вы так привязались с запыленностью? Покажите, что лопасти могут при посадке накидать столько пыли, чтобы это на что-то повлияло.
Вот тут в конце стр 15 пишут немного про энергетический бюджет. А на следующей странице — про обогрев.
Если на обычный соосник...
И получится
корабль Тезеямарсианский электрический вертолет. Вы же утверждали про доступные в свободной продаже модели вертолетов.Serzsh
11.08.2021 00:49+1Не понимаю в чем проблема? Угол наклона не меняется сильно, потому что вертолет не садится на склоны. И что вы так привязались с запыленностью? Покажите, что лопасти могут при посадке накидать столько пыли, чтобы это на что-то повлияло.
Если вертолет висит над поверхностью, то вокруг винта образуется вихревое кольцо, которое поднимает пыль с поверхности и закидывает ее сверху над винтами.

На картинке вертолет летит горизонтально и достаточно высоко над поверхностью, поэтому завихрения остаются за ним. А когда вертолет садится, то он сам в этих завихрениях купается.
А теперь поставьте над винтами неподвижную горизонтальную панель.
Да, я не знаю точно, сколько пыли на ней осядет. Но, я бы так не делал. Или заставил бы эту панель крутиться вместе с верхним винтом для возможности очистки.
И получится
корабль Тезеямарсианский электрический вертолет. Вы же утверждали про доступные в свободной продаже модели вертолетов.Так и лопасти из свободной продажи. И, вообще, лопасти - это расходники.
А то, что надо немного руки приложить - так это к любой модели, будь она хоть трижды "реди ту флай" - не приложишь руки - будешь эту "редьку" из земли по частям выковыривать.
dcoder_mm Автор
11.08.2021 01:20Зачем вы показываете мне вертолет на Земле? Покажите то-же самое на Марсе, оцените сколько пыли падает на батарею и сколько с нее сдувает на следующем полете.
Но, я бы так не делал.
Это не имеет отношения к вопросу.
А то, что надо немного руки приложить
Утверждение было про доступный в продаже вертолет.
Serzsh
11.08.2021 02:02Зачем вы показываете мне вертолет на Земле? Покажите то-же самое на Марсе, оцените сколько пыли падает на батарею и сколько с нее сдувает на следующем полете.
Затем, что характер обтекания винтов одинаков, что на Марсе, что на Земле, в противном случае этот вертолет не смог бы летать.
Данных для оценки количества пыли, падающего на батарею не имею. Могу дать только качественную оценку - расположение неподвижной горизонтальной панели над винтами наиболее благоприятно для сбора на ней пыли. При сборе достаточного количества пыли при посадке, последующих полетов просто не будет.
Утверждение было про доступный в продаже вертолет.
Замена лопастей и изменение количества аккумуляторов не является переделкой модели. Для доступных в продаже моделей вертолетов существуют различные по размеру и профилю лопасти, к тому же, лопасти от разных моделей зачастую взаимозаменяемы. Тип и емкость аккумуляторов выбираются в зависимости от задач. Так, например, для тренировок рекомендуется использовать LiFePO4, а для соревнований Lipo. Полет без декоративного фюзеляжа обычно производится при настройке модели вертолета. Также, для многих моделей вертолетов выпускаются наборы для апгрейда - двигатели, шестерни главного редуктора с различным передаточным числом, контроллеры управления, различные модификации автоматов перекоса и т.д.
dcoder_mm Автор
11.08.2021 11:12+1При сборе достаточного количества пыли при посадке
Ну так покажите, для начала, на сколько нужно снизить поток энергии от солнечной батареи, чтобы баланс стал отрицательным и вертолет замерз ночью. Для этого не нужно знать ничего о пыли.
Потом уже можно поговорить о пыли (вот видео где вертолет раскидывает пыль на Марсе, я до последнего надеялся что вы его найдете сами).
В итоге, чтобы сказать что миссия обречена на провал, вам нужно показать что вертолет не смог бы совершить 5 полетов по 90 секунд в течении 30 дней. Именно такие были изначальные цели миссии. Обратите внимание, что погода на Марсе довольно предсказуема, а вертолет был именно техническим демо, так что аргумент "а вот если бы началась песчаная буря он бы помер" — не аргумент.
Только пожалуйста, не ссылайтесь на ваш опыт, неуместные аналогии и "всем очевидно". О вашем опыте я ничего не знаю (и не хочу знать, это не имеет отношения к делу). Приводите цифры и данные для Марса, проверьте их несколько раз. Тогда этот разговор будет продуктивным и интересным.
dcoder_mm Автор
11.08.2021 11:52+1А вот еще одно видео, чуть лучше. Тут видно и взлет и посадку.
А вот так выглядели панели сразу после отделения вертолета от ровера (3 апреля). Первый полет был 19 апреля, до него пару раз тестировали моторы, без взлета. Обратите внимание, что такое количество пыли этому не помешало.
Вот здесь цитируют брифинг, в котором говорят, что после полета пыли стало меньше. А значит куча пыли не мешающая работе вертолета еще и не задерживается на батареях.
Serzsh
11.08.2021 17:30Спасибо, видео полетов, на которых вертолет поднимает пыль я и сам нашел, а вот фото панели с пылью - нет.
Если исходить из утверждения, что "на подогрев тратится половина мощности", то, для гарантированного переохлаждения необходимо снижение мощности более, чем на 50%, но, обычно закладывают запас по мощности, величина запаса неизвестна, так же, как и требуемая мощность на подогрев (по крайней мере, я таких данных не нашел).
Фото панели показывает тридцать элементов. Логично предположить соединение в три параллельных группы по десять последовательно включенных элементов в каждой. Судя по расположению пыли (весьма благоприятному), батарея работоспособна на 2/3 - первая группа выдает напряжение меньше, чем две других и в обеспечении питания не участвует. Пациент скорее жив, чем мертв.
Если бы пыль накрыла еще одну группу - скорее всего, вертолет бы переохладился, хотя, опять таки, неизвестна схема подключения и запас по мощности. Может, надо накрыть более 60% площади панели.
Что касается попыток численно оценить степень запыленности, то для этого требуется, как минимум, знать толщину слоя пыли и ее гранулометрический состав в местах посадок вертолета. Предполагаю, что этого не знали и сами американцы.
Но, предусмотреть элементарные меры для возможности очистки панели или изотопного подогрева, американцы не сочли нужным. Зачем? Они ведь и так знали, что все будет "Окей".
Панель расположена в зоне, которая не обдувается винтами, но обильно осыпается пылью, поднимаемой винтами.
Подумаешь, какая ерунда, американцы ведь сказали, что при полете панель очистилась, так что "чииз" и аплодисменты ушами.
Это даже круче, чем игра с шулером.
dcoder_mm Автор
11.08.2021 17:49+1Вы действительно считаете что существует заговор государственного масштаба, раскрытие которого ставит под удар весь престиж NASA/JPL, и вы один из немногих (иначе бы об этом трубили все вокруг) людей, которые смогли это заметить?
Serzsh
11.08.2021 19:53-3Как бы понятнее сформулировать...
Мне не хочется уходить в дебри, но, похоже, придется немного отвлечься.
Что означает термин "заговор"?
Да, любое соглашение между группой лиц, которое не афишируется, попадает под определение заговора. Негласные соглашение правительств, договоры спецслужб, соглашения между руководителями нефтяных и других компаний, даже, извините, договоренность двух товарищей с целью разыграть третьего - это тоже заговор.
Вся история войн и революций - это история заговоров. Та же холодная война - тоже заговор, что мы можем наблюдать по ее результатам.
Как можно отрицать негласные межправительственные соглашения, глядя на ситуацию в мире с локдаунами, модной болезнью, добровольно - принудительным иглоукалыванием экспериментальными препаратами, которое фактически переходит из области медицины в область ветеринарии, так, как права животных никого не интересуют?
Все еще сомневаетесь?
Посмотрите замечательный ролик: https://www.youtube.com/watch?v=pd9ADQ-kuVQ особенно, концовку, начиная с 25:37 Одна минута в конце не отнимет много Вашего времени.
Ссылка на сам патент: https://pubchem.ncbi.nlm.nih.gov/patent/US-2020279585-A1
Вспоминается анекдот - одна овца говорит другой: "Мне кажется, что собаки и пастух действуют заодно", вторая отвечает: "Как ты уже достала со своей теорией заговора".
То, что принято называть заговорами - это обыденность, просто, надо смотреть, кому это выгодно.
Существует много статей и видеороликов, показывающих кино- и фото-ляпы в американской лунной программе. Казалось бы, зачем делать такие глупости, которые так легко разоблачаются? Ведь действительно, большинство материалов по лунной программе настолько явно фальсифицированы, что сегодня даже космонавты открыто говорят о том, что многое пришлось доснимать на Земле, "да, американцы на Луне были, но, не совсем так, как показывают" и т.д. Зачем было рисковать престижем? Оказывается, было зачем.
Успех в Лунной гонке послужил достаточно мощным психологическим фактором воздействия на сознание советских людей и немало помог осуществить развал Союза, что после принесло немалые доходы Америке путем установления гегемонии доллара. А в тот момент достичь реального успеха НАСА просто физически не могло, но, выбора не было, время поджимало, советская лунная программа была на подходе. Вот и пришлось пойти на риск, который себя оправдал. Падение престижа НАСА в будущем - это ничто по сравнению со своевременным подъемом престижа Америки. Впрочем, Вы правы, сегодня мало кто задумывается над реальностью программы полетов "Апполонов" и развал системы образования немало этому способствует.
А что касается марсианской программы... Данные, получаемые из одного источника без возможности проверки из альтернативных источников однозначно вызывают сомнение, так как велика вероятность обмана.
Да, НАСА, наверняка запустило аппараты на Марс. Эти данные подтверждаются альтернативными данными - Союз также запускал аппараты на Марс. Советские, аппараты на орбите Марса функционировали и смогли даже осуществить посадку, что совсем не удивительно, ведь в Союзе массово применялась система десантирования БМД на парашютах с применением тормозных двигателей мягкой посадки. Но, с передачей видеоданных не вышло. То ли техника подвела, то ли договоренность по лунной программе уже действовала.
А дальше все данные идут только от американских аппаратов. Чего только стоит замечательное рассеивание света на пылевых частицах, делающее марсианские пейзажи так похожими на земные. Да, развитие компьютерной техники позволяет изобразить все, что угодно, предварительно создав непротиворечивую модель. Так, что, невозможно проверить, действительно ли роверы ездят по Марсу или по Шпицбергену.
Но, "единожды солгавший, кто тебе поверит?"
dcoder_mm Автор
11.08.2021 21:02+2https://www.reuters.com/article/uk-factcheck-patent-idUSKBN27C34O
У вас довольно очаровательная каша в голове, но меня это уже утомило, простите. На этом всё.
Serzsh
11.08.2021 22:01-1Для кого каша, для кого - сопоставление косвенных данных. Впрочем, Вы правы. Пора завершать.
0serg
11.08.2021 22:02Ведь действительно, большинство материалов по лунной программе настолько явно фальсифицированы,
Ни одного не видел. Я видел очень много бреда от «разоблачателей лунного заговора» и лишь несколько стоящих возраженийА в тот момент достичь реального успеха НАСА просто физически не могло
Это довольно странное утверждение учитывая что НАСА опередило СССР отнюдь не во времена «Аполло» а еще за несколько лет до этого в ходе «Джемини». После Аполло американцы тоже демонстрировали уверенное лидерство, так что говорить о том что они растеряли задел тоже не приходится.
Serzsh
12.08.2021 00:49-3Это довольно странное утверждение учитывая что НАСА опередило СССР отнюдь не во времена «Аполло» а еще за несколько лет до этого в ходе «Джемини». После Аполло американцы тоже демонстрировали уверенное лидерство, так что говорить о том что они растеряли задел тоже не приходится.
Конечно, жестянка "Джемини", собранная на шурупах - это явный прорыв )))
А блестящие, без следов обгорания "Аполлоны" выглядят намного лучше, чем какие - то обгорелые советские спускаемые аппараты.
Физическая подготовка астронавтов, гордо идущих "с корабля на бал" вообще выше всяческих похвал, не то, что у чахлых советских космонавтов, которые еле шевелятся )))
Ну, и, конечно, точность посадок "Аполлонов" должна вызывать зависть у бездарных "совков", ищущих свои "огарки" то в степи, то в тайге.
И даже чистый кислород в "Аполлонах" никогда не сможет причинить вреда бравым американским астронавтам.
0serg
12.08.2021 01:44+4Конечно, жестянка «Джемини», собранная на шурупах — это явный прорыв )))
Эта жестянка позволяла делать больше чем советские КА того времениНу, и, конечно, точность посадок «Аполлонов» должна вызывать зависть у бездарных «совков», ищущих свои «огарки» то в степи, то в тайге.
Совершенно верно, ибо это была одна из технологий отработанных как раз на Джемини и неоднократно использовавшихся в дальнейшем (скажем для Шаттлов промах в десяток км мимо полосы == катастрофа). На Джемини пока шла отработка было подряд несколько неудачных посадок, но в итоге технологию отладили и на Аполло она работала уже безупречно. То что наши осилили повторить эту технологию лишь десятилетия спустя в Буране, причем эта технология были успешно, эм, утрачена при распаде СССР весьма ярко характеризует отставание советской космонавтики тех летФизическая подготовка астронавтов, гордо идущих «с корабля на бал» вообще выше всяческих похвал, не то, что у чахлых советских космонавтов, которые еле шевелятся
Вы вроде большой мальчик а в сказки верите. Вас никогда не удивляло что в штатную программу российских космонавтов в обязательном порядке входит курс выживания в зимней тайге, причем в составе типового курса экипаж из трех человек должен не только выжить, но и вытащить силами двоих третьего «раненого» из леса? Вы когда-нибудь пробовали тащить человека, пусть даже вдвоем, по лесу? Ну так вот тонкий намек: это даже здоровому человеку сделать сложно, а «чахлому и еле шевелящемуся» — невозможно. Между тем столь «невозможное» задание в программу подготовки входит не просто по прихоти: это наследие Восхода-2 который в марте 1965 реально приземлился в зимней тайге. Как ни удивительно, но «полудохлые» космонавты 1) самостоятельно выбрались через люк неудачно оказавшийся «на крыше» аппарата 2) нарубили дров и развели костер 3) вытащили через тот самый люк тяжелую рацию дабы связаться со спасателями 4) пережили две ночевки и 5) самостоятельно вышли в итоге на лыжах из леса. Проблемы с физической формой есть лишь у космонавтов пробывших на орбите полгода и больше, да и у тех в общем-то, нужды в медиках не так много, это больше перестраховка.И даже чистый кислород в «Аполлонах» никогда не сможет причинить вреда бравым американским астронавтам.
При нормальном парциальном давлении — не сможет.А блестящие, без следов обгорания «Аполлоны» выглядят намного лучше, чем какие — то обгорелые советские спускаемые аппараты.
Там другая технология, другие теплоизоляционные материалы, другой характер обтекания — удивительно, да? Капсулы вполне себе обгорелые, просто это не так заметно как у наших.
Serzsh
12.08.2021 05:54-3Полет Восхода-2 длился 26 часов 2 минуты, а после восьмисуточных полетов "зайчиками" прыгали только "бравые астронавты".
Что касается длительно дыхания чистым кислородом без последствий, то это допустимо при 0,21 кг/см2, но не при 0,35.
Обсуждать вымышленную технику не интересно.
0serg
12.08.2021 11:21+1По восьмисуточным полетам есть прекрасная статистика полета Шаттлов. Там типовые миссии были как раз по 7-12 дней и в каждой летало обычно 6-7 человек. Какое объяснение вы предлагаете для наблюдаемого факта что из Шаттлов все они выходили бодрыми?
Что касается длительно дыхания чистым кислородом без последствий, то это допустимо при 0,21 кг/см2, но не при 0,35.
Кислород токсичен лишь при парциальном давлении выше 0.5 кг/см2.Обсуждать вымышленную технику не интересно.
А мне довольно интересно, т.к. я не вижу никакой реальной возможности создать Шаттл не создав до этого Аполло. Технология точной посадки которую вы затронули в этом плане очень хороший маркер. В «официальной» версии истории четко виден период создания технологии критически превосходящей то чем располагал на тот момент СССР, этапы ее взросления и конечный результат в виде критически зависящего от технологии Шаттла. А у вас что взамен? Американцы провалили Аполло, но каким-то образом внезапно создали Шаттл на 10 лет раньше чем наши осилили (вдобавок более простой) Буран?
dcoder_mm Автор
12.08.2021 15:32я не вижу никакой реальной возможности создать Шаттл не создав до этого Аполло
Немного оффтоп, но вы мне напомнили про путешествие двигателя AJ-10. Он, в разных модификациях, был и двигателем Apollo CSM и двигателем OMS у шаттла и теперь его собираются ставить на Orion.
Serzsh
12.08.2021 19:51Какое объяснение вы предлагаете для наблюдаемого факта что из Шаттлов все они выходили бодрыми?
Уровнем максимальной перегрузки на этапе атмосферного торможения. Для Аполлона 6,2 G, для Шаттла 1,5 G. После недельного полета снижается тонус сосудистой системы и снижается способность организма переносить перегрузки. Поэтому 1,5 G не вызывают проблем, а после 6,2 G "бодрячок" сдувается у всех кто эту неделю реально отлетал.
Это, если не учитывать, что на Союзах стоят двигатели мягкой посадки, а Аполлон бьется широким плоским дном об воду на 30 км/ч.
С кислородом - ладно, пусть будет, правда, летчики говорят, что сушит сильно, но при влажности 70% - может и сойдет.
я не вижу никакой реальной возможности создать Шаттл не создав до этого Аполло.
Перед Шаттлами американцы проводили испытания гиперзвуковых планеров, так, что, Аполлон с его максимальным аэродинамическим качеством 0,368 (у Союза 0,3) для создания Шаттла с максимальным аэродинамическим качеством 1,3 на гиперзвуке и 4,4 на дозвуке - не совсем удачный пример.
А у вас что взамен? Американцы провалили Аполло, но каким-то образом внезапно создали Шаттл на 10 лет раньше чем наши осилили (вдобавок более простой) Буран?
В Союзе в рамках программы Спираль были построены и испытаны ракетопланы - беспилотный Бор (первый успешный полет Бор -2 в 1970 году) и пилотируемый МиГ105.11 (дозвуковой аналог орбитального самолета). В 1976—1978 гг. в ЛИИ было проведено 7 испытательных полётов Миг-105.11. Разработки жаростойких теплозащитных материалов типа «пенокерамика» в рамках проекта «Спираль» велись за 15 лет до начала полётов по американской программе «Спейс шаттл», а также за 16 лет до первого испытания советских кварцевых плиток на космическом корабле БОР-4 и за 22 года до полёта «Бурана» (на БОР-4 отрабатывалась теплозащита для «Бурана»
Кстати, по словам Леонида Каденюка, совершившего полет в 1997 году на Колумбии, по сравнению с Бураном, Шаттл - дикое старье.
0serg
12.08.2021 22:12+1Уровнем максимальной перегрузки на этапе атмосферного торможения.
И так методом последовательных исключений («это не перегрузка», «это не длительность полета») мы пришли к непроверяемому утверждению т.к. примеров полетов длительностью 8 дней с посадкой при перегрузке 7g у нас кроме Джемини/Аполло и Союзов нет.После недельного полета снижается тонус сосудистой системы и снижается способность организма переносить перегрузки
По моим сведениям этот процесс идет не настолько быстро. У нас есть две реперные точки с которыми согласны оба: 2 дня — способнсть переносить перегрузки сохраняется, 6 месяцев — нарушена. На мой взгляд точка «8 дней» гораздо ближе к «2 дням» чем «6 месяцам» и способность переносить перегрузки при этом остается на высоком уровне.Перед Шаттлами американцы проводили испытания гиперзвуковых планеров,
Да, но мы говорим про систему управления с инерциальным датчиком положения обеспечивающую высокую точность приземления. На Союзе ее так и не осилили, вы почему-то решили что на Аполло/Джемини это тоже не возможно, но при этом мы достоверно знаем что на последовавших за ними Шатллах американцы ее точно использовали и она сработала с первого раза, что на мой взгляд, реалистичнее в «официальной» версии где технологию отрабатывали на Джемини и там было несколько неудач прежде чем начались успехине совсем удачный пример
Понимаете в чем дело, мы создали Буран только после Восхода, Союза, ТКС на которых было отработано много технологий. У американцев аналогичная цепочка состоит с ваших слов из «несуществующих» Джемини, Аполло. Но это значит что на Шаттлах надо было отрабатывать не только технологию гиперзвукового планера, но и все остальное — навигацию, жизнеобеспечение, маневрирование, управление. И все получилось с первого раза, причем с человеком на борту. Мне не очень понятно почему вы считаете что подобное создание с нуля сразу всего более реалистично чем официальная версия что к созданию Шаттлов американцы шли через пару поколений более простых аппаратов.Разработки жаростойких теплозащитных материалов типа «пенокерамика» в рамках проекта «Спираль» велись за 15 лет до начала полётов по американской программе «Спейс шаттл»
Но Шаттл полетел все равно на 8 лет раньше Бурана что ярко противоречит вашей вере в то что американцы отставали в создании космической техники.Кстати, по словам Леонида Каденюка, совершившего полет в 1997 году на Колумбии, по сравнению с Бураном, Шаттл — дикое старье.
Старье, не старье, но Шаттл был полноценной многоразовой системой, а гораздо более поздний Буран — нет. Что опять же ставит мягко говоря под вопрос тезис о лидерстве советской космонавтики.
Serzsh
14.08.2021 00:37-1По моим сведениям этот процесс идет не настолько быстро.
По моим сведениям, неделя - это предел, до которого среднестатистический космонавт способен без применения тренажеров и достижений космической медицины вернуться и не стать инвалидом. Да, бывают и уникумы, которые намного легче переносят перегрузки после невесомости.
Что касается шестимесячных полетов, то достижения космической медицины и специальные тренажеры на МКС позволяют космонавтам остаться в живых при посадке и большинству из них - не стать инвалидами. У меня хороший знакомый во время второго полета чуть не загнулся. После посадки - срочная операция (почки).
Тот же Мельдоний, который допингом не является, но, ВАДА назначило его допингом, пришел в спорт из космической медицины. В аптеках продается под названием Милдронат - почитайте инструкцию, кому и зачем его назначают (о космонавтах там не сказано )))
Да, но мы говорим про систему управления с инерциальным датчиком положения обеспечивающую высокую точность приземления. На Союзе ее так и не осилили, вы почему-то решили что на Аполло/Джемини это тоже не возможно, но при этом мы достоверно знаем что на последовавших за ними Шатллах американцы ее точно использовали и она сработала с первого раза
Шаттл в автоматическом режиме выполняет только торможение. до тех пор, когда можно будет опустить нос без риска прогорания иллюминаторов. Все остальное - вручную. Это не "отсталый" Буран, который садился на автомате.
Для стабилизации при автоматическом торможении более, чем достаточно систем, отработанных на баллистических ракетах, а системы жизнеобеспечения можно и на подводных лодках отрабатывать - смысл тот же.
После торможения Шаттл имеет скорость в несколько М, что позволяет маневрировать на несколько сотен км за счет аэродинамики. Это и есть та самая "система точной посадки" - пилот в кабине за ручкой управления.
На Джемини и Аполлонах не было никакой "системы точной посадки" - была лапша на ушах, суборбитальные прыжки и сбросы с самолетов. А у Аполлона, в отличие от Шаттла и Союза два устойчивых положения - вверх конусом и вниз конусом. Глюканула на секунду ориентация и п-ц котятам, обратно уже не выведешь.
Посмотрите, сколько астронавтов гробанулось на реально летавших на низкой орбите Шаттлах. А на Аполлонах, летавших на Луну, только один экипаж, да и то на старте. По сравнению с Аполлонами, Шаттлы - это деградация. А, вот, если Шаттлы - первые, тогда все понятно.
на Шаттлах надо было отрабатывать не только технологию гиперзвукового планера, но и все остальное — навигацию, жизнеобеспечение, маневрирование, управление
Все это можно отрабатывать на автоматических КА, самолетах и подводных лодках. Пока космонавт не взялся за ручку управления, Шаттл от автомата отличается только типом груза.
Но Шаттл полетел все равно на 8 лет раньше Бурана что ярко противоречит вашей вере в то что американцы отставали в создании космической техники.
Программа "Спираль" делалась на 15 лет раньше Шаттлов. Просто, Спираль - это орбитальный перехватчик, а, Шаттл, что бы ни говорили - орбитальный ракетоносец. Просто, во времена разработки Спирали перехватывать было еще некого, поэтому и отложили "до лучших времен", а после появления Шаттла лихорадочно схватились за Буран и создали универсальную систему Энергия, которой Шаттл и в подметки не годится.
Шаттл был полноценной многоразовой системой, а гораздо более поздний Буран — нет.
Шаттл был орбитальным ракетоносцем, как и Буран, все остальное - лапша на ушах. Да, то, что нам рассказывали про невозможность орбитального нырка и сброса бомбы - правда, но, та же бомба с небольшим тормозным блоком обеспечивает доставку намного быстрее, чем межконтинентальные ракеты.
На химических двигателях любая многоразовая система будет неполноценной в соотношении цена - качество.
Вывод грузов с помощью Шаттлов - идиотизм. Каждый килограмм получается золотым. Ради вывода спутника доставлять на орбиту стотонный челнок? А снятие поломавшихся спутников с орбиты себя никак не окупает.
Что спасает Шаттл? Бак? - Нет. Ускорители? - Теоретически, да, но в реальности ускорители повторно ни разу не использовались. Три движка? - Да!!! И ради этого огород городить?
Единственное реальное назначение Шаттлов, как и Бурана - военное.
А, вот, система Энергия - это реальная рабочая лошадка - тяжеловоз.
0serg
14.08.2021 14:57+2По моим сведениям, неделя — это предел, до которого среднестатистический космонавт способен без применения тренажеров и достижений космической медицины вернуться и не стать инвалидом
За счет чего он станет инвалидом, простите? Биологические механизмы деградации организма на орбите известны и ни один из них не работает настолько быстро.Шаттл в автоматическом режиме выполняет только торможение. до тех пор, когда можно будет опустить нос без риска прогорания иллюминаторов. Все остальное — вручную.
Это неверно. Шаттл может идти на автомате вплоть до последних метров захода на полосу. Пилот выполняет вручную только финальное касание, аналогично современным авиационным ILS cat 2. Собственно ничего особенно в автоматической посадке нет, англичане еще в 60х годах ее на своих Trident успешно эксплуатировали, и Шаттл в этом смысле не исключение — там такую возможность тоже предусматривали. Но поскольку в отличие от самолета возможности уйти на второй круг у Шаттла нет, то на ранних стадиях испытаний когда отрабатывались сценарии возможных отказов, в т.ч. отказа autoland, стало понятным что проще заранее дать пилоту управление чем просить его следить за работой автопилота и пытаться успеть перехватить его в случае ошибки. Заход там все равно строится по приборам, пилот выдерживает ту глиссаду которую ему показывает компьютер, просто он включен в цепь управления сразу же — и это разумно.После торможения Шаттл имеет скорость в несколько М, что позволяет маневрировать на несколько сотен км за счет аэродинамики.
У Шаттла L/D ratio = 2, он летит как утюг. Это не авиалайнер с L/D = 17 способный улететь с 10 км высоты на 170 км. С L/D=2 Шаттл способен улететь с 10 км только на 20 км в сторону. Штатный маневр «захода на посадку» у Шаттла правда начинается с 25 км что дает ему чуть больше дальности планирования — примерно 50 км, но промах в 100 км так невозможно исправить.
Кроме этого элементарного соображения есть и второе: Шаттл не очень хорошо управляется. Представьте себе что Вы вышли на высоте 25 км прямо над полосой. Вы с одной стороны уже «так где нужно», но с другой — Вам надо погасить эти 25 км высоты и 2 маха скорости. Придется это делать снижаясь по спирали и делать это так чтобы ее конец точно уперся в полосу. Это довольно сложный и опасный маневр и хорошо известно что в реальных полетах подобные трюки не выполнялись что говорит о том что точность выхода на финальный участок траектории значительно выше чем плюс-минус 50 км.Все это можно отрабатывать на автоматических КА, самолетах и подводных лодках.
Совершенно неясно что мешало это отрабатывать на пилотируемых КА если это так просто :)Шаттл был орбитальным ракетоносцем, как и Буран, все остальное — лапша на ушах
Полный бред, уж извините.та же бомба с небольшим тормозным блоком обеспечивает доставку намного быстрее, чем межконтинентальные ракеты.
Видите ли в чем дело: как вы верно заметили для этого просто не нужен Шаттл. Одноразовая ракета справится с задачей вывода подобного блока намного проще. Он будет летать себе по орбите в пассивном режиме а если нужно — внезапно войдет в атмосферу.Что спасает Шаттл? Бак? — Нет. Ускорители? — Теоретически, да, но в реальности ускорители повторно ни разу не использовались.
Неверно, ускорители постоянно использовались повторно. Это требовало их полной переборки с частичной заменой компонентов, да, но большая часть летала множество раз. К концу программы были компоненты отлетавшие аж по 59 стартовТри движка? — Да!!! И ради этого огород городить?
Конечно! Ведь движки — это 70% стоимости ракеты.Вывод грузов с помощью Шаттлов — идиотизм. Каждый килограмм получается золотым. Ради вывода спутника доставлять на орбиту стотонный челнок?
Почему бы и нет, если в пусках расходуется не дорогостоящая ракета а лишь дешевый одноразовый бак?А снятие поломавшихся спутников с орбиты себя никак не окупает.
Там идея была немного в другом: 100 тонный челнок включал в себя не только спутник, но и экипаж. А это возможность, к примеру, починить сломавшийся спутник на орбите (что реально использовалось пару раз для ремонта Хаббла). Или собрать спутник из нескольких деталей прямо на орбите (что тоже потом реально использовалось для сборки МКС).
Serzsh
14.08.2021 20:59-1За счет чего он станет инвалидом, простите? Биологические механизмы деградации организма на орбите известны и ни один из них не работает настолько быстро.
Не буду спорить с экспертом )))
Шаттл может идти на автомате вплоть до последних метров захода на полосу.
В теории может, но на практике маневры в атмосфере выполняли астронавты по данным с земли.
...У Шаттла L/D ratio = 2, он летит как утюг...
...Представьте себе что Вы вышли на высоте 25 км прямо над полосой. Вы с одной стороны уже «так где нужно», но с другой — Вам надо погасить эти 25 км высоты и 2 маха скорости.
Утюг, летящий горизонтально на высоте 50 км со скоростью 7 - 10 Махов и способный выполнять аэродинамические маневры - это совсем не то, что утюг, сброшенный с высоты 25 км )))
И еще момент - и Шаттл и Буран имели возможность активного полета в атмосфере на высоте 50км. Два движка возле киля применялись не только в космосе, на борту перед посадкой имелся обязательный запас топлива для активного полета в атмосфере.
Одноразовая ракета справится с задачей вывода подобного блока намного проще. Он будет летать себе по орбите в пассивном режиме а если нужно — внезапно войдет в атмосферу.
Не справится.
Термоядерные боеголовки требуют регулярного обслуживания, поэтому для их базирования на орбите необходимы челноки. Челнок после завершения дежурства садится с боеголовками и экипажем.
Базирование на орбите в то время позволяло нанести внезапный ядерный удар и не дать противнику времени на развертывание средств ПВО.
К тому же, спутник с атомной боеголовкой при падении на чужой территории, даже если и не сдетонирует, может стать поводом для войны. Инциденты со спутниками бывали, правда, там были только изотопные источники, но шума было много.
Второе преимущество - челноки позволяют оперативно менять состав и численность орбитальной группировки.
Программа "Спейс шаттл" была одной из главных компонент военной доктрины США - нанесение внезапного первого удара.
Неверно, ускорители постоянно использовались повторно. Это требовало их полной переборки с частичной заменой компонентов
Из ускорителей есть смысл повторно использовать только секции корпуса, скатанные из титановой фольги. Но, при посадке на воду они тоже немного деформируются. Может, некоторые из них и использовались повторно, но это не целиком ускорители.
Может и болты с гайками, стягивающие секции тоже использовались повторно)))
0serg
14.08.2021 22:45В теории может, но на практике маневры в атмосфере выполняли астронавты по данным с земли.
Нет. В третьем полете Шаттла к примеру автопилот работал практически до касания. Потом любой челнок садится «по данным с земли» (наводится по радиомаяку).Утюг, летящий горизонтально на высоте 50 км со скоростью 7 — 10 Махов и способный выполнять аэродинамические маневры — это совсем не то, что утюг, сброшенный с высоты 25 км )))
Хитрый утюг или простой, но с таким L/D улететь «на сотни километров» он физически не мог :)Два движка возле киля применялись не только в космосе, на борту перед посадкой имелся обязательный запас топлива для активного полета в атмосфере.
Эм нет. У Бурана планировалось создать что-то подобное в одной из версий (11Ф35). В таком варианте он мог бы лететь довольно долго, да. Но это на Буране так и не сделали а на Шаттле никогда и не предусматривали. Все посадки обоих аппаратов идут в режиме чистого планированияТермоядерные боеголовки требуют регулярного обслуживания
Да. Раз в несколько лет. А Шаттл летает максимум две недели. Постоянно вы его на орбите держать не сможете, а для «угрожаемого периода» или там когда планируется нападение целесообразнее запустить пачку беспилотных зарядов способных там провисеть не пару недель а пару лет. В теории челноки конечно могли бы этот флот годами летающий в космосе обслуживать, да, но это явно уже ближе к стратегии ответного удара возмездия а отнюдь не «внезапного первого» о котором пишете вы. Для «внезапного первого» челнок совершенно не нужен.К тому же, спутник с атомной боеголовкой при падении на чужой территории, даже если и не сдетонирует, может стать поводом для войны.
Это точно так же верно и для Шаттла упавшего с боеголовкой.Второе преимущество — челноки позволяют оперативно менять состав и численность орбитальной группировки.
Любые ракеты позволяют менять состав и численность орбитальной группировки. И большинство из них позволяют это делать оперативнее чем Шаттлы.Может, некоторые из них и использовались повторно, но это не целиком ускорители.
Там весь ускоритель — это корпус, система управления и топливо. Корпус и систему управления использовали повторно. Топливо да, приходилось заменять :).
Serzsh
15.08.2021 01:50Нет. В третьем полете Шаттла к примеру автопилот работал практически до касания. Потом любой челнок садится «по данным с земли» (наводится по радиомаяку).
И что с того, что автопилот работал по радиомаякам? Это маневры планера в атмосфере, а не мифическая "система точной посадки" с Аполлонов.
Хитрый утюг или простой, но с таким L/D улететь «на сотни километров» он физически не мог :)
Вольфрамовые стержни из рельсотронов планируют "пулять" на сотни км. А если есть возможность маневра, то можно выбирать, где садиться на этих сотнях км. Шаттлы это делали, Буран это делал, гиперзвуковые планеры это делали, а Аполлоны и Союзы это делать не могут. Или вы считаете, что при сходных L/H система управления современных Союзов отстает от Аполлонов?
Эм нет. У Бурана планировалось создать что-то подобное в одной из версий (11Ф35). В таком варианте он мог бы лететь довольно долго, да. Но это на Буране так и не сделали а на Шаттле никогда и не предусматривали. Все посадки обоих аппаратов идут в режиме чистого планирования
Эм, да. Пустотные движки на 50 км спокойно работают. И на Шаттлах и на Буране они стояли и запас топлива на борту был. Эм, просто, я эту информацию изучал в 80-е, когда Шаттлы летали, а сейчас можно рассказать, что угодно. Второй вопрос, что необходимости не возникало - хватало дальности на гиперзвуке, но, возможность была и там и там изначально.
Да. Раз в несколько лет. А Шаттл летает максимум две недели. Постоянно вы его на орбите держать не сможете, а для «угрожаемого периода» или там когда планируется нападение целесообразнее запустить пачку беспилотных зарядов способных там провисеть не пару недель а пару лет. В теории челноки конечно могли бы этот флот годами летающий в космосе обслуживать, да, но это явно уже ближе к стратегии ответного удара возмездия а отнюдь не «внезапного первого» о котором пишете вы. Для «внезапного первого» челнок совершенно не нужен.
Раз в несколько лет - это сейчас. Но, даже сейчас нужно обслуживать, а не ронять на Землю или оставлять на орбите после завершения срока хранения. Шаттл может и обслуживать, но, удобнее не гоняться за каждым зарядом, а возить их в контейнере на дежурство.
Смысл зарядов на орбите - быстрый первый удар. Для ответного и наземных средств хватит. Да и Спираль была наготове - если Союз планировал бы первый удар, то Шаттлы ссадили бы с орбиты перед запуском ядерных ракет наземного базирования.
Это точно так же верно и для Шаттла упавшего с боеголовкой.
Шаттлы падают реже, чем спутники и на борту челнока есть персонал.
Любые ракеты позволяют менять состав и численность орбитальной группировки. И большинство из них позволяют это делать оперативнее чем Шаттлы.
Ракеты не позволяют уменьшать состав группировки - посадить десяток боеголовок на парашютах - экстрим еще тот.
Там весь ускоритель — это корпус, система управления и топливо. Корпус и систему управления использовали повторно. Топливо да, приходилось заменять :).
Ускоритель - это корпус, собранный из секций, сопло, топливный заряд, бронирование и воспламенитель. Нет там системы управления.
Сопло повторно не используется. Корпус разбирается на секции, секции очищаются и отбраковываются. Те, которые прошли отбраковку бронируются, затем заливаются твердым топливом. Ни один ускоритель повторно не летал - в каждом были поврежденные секции.
0serg
15.08.2021 11:59Это маневры планера в атмосфере, а не мифическая «система точной посадки» с Аполлонов.
Маневры планера в атмосфере позволяют исправить ошибку порядка 50 км. Но без системы точной посадки вы с такой точностью в заданный район не выйдитеВольфрамовые стержни из рельсотронов планируют «пулять» на сотни км
Да, только летят они при этом через космосА если есть возможность маневра, то можно выбирать, где садиться на этих сотнях км
Разумеется нет. Точка падения определяется на 95% скоростью старта и углом возвышения при выстреле из рельсотрона. Аэродинамическая коррекция обеспечивает лишь точное прицеливание на конечном этапе.Шаттлы это делали, Буран это делал, гиперзвуковые планеры это делали, а Аполлоны и Союзы это делать не могут.
Вы собственно принцип посадки Аполлонов и Союзов неверно себе представляете. Это ровно те же гиперзвуковые планеры. Вся разница с Шаттлом в том что у них на сверзвуке подъемная сила уже слишком мала чтобы улететь дальше нескольких километров тогда как Шаттл снижает угол атаки увеличивая L/D и еще километров 50 может планировать. Но на гиперзвуке управляются они по одинаковым принципамЭм, да. Пустотные движки на 50 км спокойно работают. И на Шаттлах и на Буране они стояли и запас топлива на борту был
Нет. Для «полета на дальность» и «главных двигателей» запаса топлива там не было. Топливо физически там как правило оставалось (гарантийный остаток от маневрирования на орбите на случай если это самое маневрирование потребует больше топлива чем планировалось) но при спуске оно никогда не использовалось. Ну и еще топливо для газодинамической системы управления (RCS) штатно оставалось — на большой высоте аэродинамические поверхности не очень эффективны.Второй вопрос, что необходимости не возникало — хватало дальности на гиперзвуке
Вопрос не в «дальности», вопрос в «точности». Но да, точности управления на гиперзвуке (та самая «система точной посадки») хватало.Раз в несколько лет — это сейчас.
Ну так у американцев сейчас те же заряды что и в 80х.Но, даже сейчас нужно обслуживать, а не ронять на Землю или оставлять на орбите после завершения срока хранения.
Если вы планируете первый удар, то вам ничего оставлять не нужно. Создали ударную группировку перед нанесением удара и сразу за этим — собственно наносите удар. А для ответного удара как вы сами заметили такие сложности не нужны.Шаттлы падают реже, чем спутники и на борту челнока есть персонал.
Примерно так же часто. А наличие персонала вообще не вижу на что влияет при обнаружении радиоактивных осадков или обломков заряда после катастрофы.Ракеты не позволяют уменьшать состав группировки — посадить десяток боеголовок на парашютах — экстрим еще тот.
А зачем вам уменьшать группировку, тем более готовящуюся к нанесению удара?Нет там системы управления.
Разумеется есть. Она отвечает за обеспечение безопасности при аварийных режимах, отделение ускорителей от Шаттла и безопасную посадку.Ни один ускоритель повторно не летал — в каждом были поврежденные секции.
Целиком — нет, не летал. Но я собственно и написал с самого начала что ускоритель разбирался и частично заменялся. Reuse наличествует, большая часть ускорителя летала повторно.
Serzsh
15.08.2021 14:47Маневры планера в атмосфере позволяют исправить ошибку порядка 50 км. Но без системы точной посадки вы с такой точностью в заданный район не выйдите
Посадка "Колумбии".
При перегрузке 0,176 и скоростном напоре 19,53 кгс/кв.м, когда высота полета соответствовала 78,9 км, а скорость - числу М=24, система управления начала рассчитывать углы разворота, необходимые для достижения базы ВВС Эдвардс (находившейся в этот момент в 5864,5 км) и расстояние до нее. Автоматическая система управления обеспечила также отображение траектории полета ВКС на экране электронно-лучевого индикатора в кабине экипажа.
Основная задача экипажа заключалась в контроле системы управления и изменение лобового сопротивления ВКС в соответствии с его эталонным значением, отображаемым на экране дисплея.
При достижении скоростного напора 97,65 кгс/кв.м на высоте 73,5 км и скорости, соответствующей числу М=23, экипаж ожидал бафтинга элевонов. Это явление имитировалось на тренажере ВКС в процессе предполетной подготовки, однако при спуске в атмосфере никаких колебаний элевонов не наблюдалось.
Следующий автоматический разворот ВКС влево был выполнен экипажем на высоте 66 км при скорости, соответствующей числу М=18.
Через 15 мин полета в атмосфере на высоте 63,9 км и при скорости, соответствующей числу М=18 (аппарат в этот момент находился в 1609 км от авиабазы Эдвардс), начался квазистационарный участок планирования ВКС, на котором система управления обеспечивала постоянство подъемной силы и перегрузки ВКС. На высоте 56,4 км начался участок полета с постоянным лобовым сопротивлением.
При скорости 2,88 км/с снова последовал правый разворот с креном 70º. Характеризуя гиперзвуковой участок полета в атмосфере, Янг заявил, что ВКС на гиперзвуковом режиме оказался более устойчивым, чем предполагалось.
Связь с экипажем была восстановлена, когда ВКС находился на высоте 56,4 км и имел скорость, соответствующую числу М=10,8. Наземные станции сопровождения обнаружили ВКС на высоте 50,3 км, когда он находился на расстоянии ~760 км от места посадки. По данным наземных средств сопровождения и бортовых систем все параметры были в норме.
ВКС пересек Калифорнийское побережье между городами Сан-Франциско и Лос-Анджелес на высоте 41,6-42,3 км при скорости, соответствующей числу М=6,5-6,6. Когда скорость ВКС снизилась до 1,44 км/с (М=5), а высота уменьшилась до 34,5 км, Янг перешел на ручное управление и выполнил левый разворот ВКС. На высоте 25,5 км (скорость ВКС соответствовала числу М=2,8) был выполнен правый разворот.
От Эдвардса до Лос Анджелеса по прямой 123 км, от Эдвардса до Сан-Франциско 513 км. Среднее значение 318км До побережья - дальше.
Только на ручном управлении Колумбия прошла около 300 км.
На высоте 63,9 км и расстоянии 1609 км от авиабазы Эдвардс, начался квазистационарный участок планирования ВКС с выполнением маневров без применения реактивных двигателей системы коррекции.
Аполлон без применения реактивных двигателей маневрировать не мог.
Так, что, обеспечить фантастическую точность приземления Аполлонов было невозможно.
Считаю, что это достаточным основанием для признания программы полета Аполлонов фейком.
0serg
15.08.2021 14:51Аполлон без применения реактивных двигателей маневрировать не мог.
Мог разумеется. Он менял угол атаки с помощью перемещения расположенного внутри специального груза менявшего центровку.При достижении скоростного напора 97,65 кгс/кв.м на высоте 73,5 км и скорости, соответствующей числу М=23
Это тот самый этап полета где и Аполло и Шаттл управлялись одинаково. Управление у Аполло было более грубым и давало контроль только по дальности, но зато ему было намного проще гасить скорость. Все эти повороты туда-сюда у Шаттла делались специально чтобы максимально замедлить его поскольку без подобных хитростей подъемной силы Шатлла с избытком хватало для отскока от атмосферы обратно в космос
Serzsh
15.08.2021 17:51Мог разумеется. Он менял угол атаки с помощью перемещения расположенного внутри специального груза менявшего центровку.
Вы действительно считаете, что можно управлять конусом, имеющим два стабильных положения, на гиперзвуке путем перемещения центра тяжести без риска опрокидывания?
Я, конечно, люблю фантастику, но не настолько.
0serg
16.08.2021 12:15+1В пределах изменения угла наклона ±30 градусов от стабильного нейтрального положения — разумеется. У конуса собственно все возможное пространство положений делится на два диапазона: в одном конус стремится к равновесию «дном вниз», в другом — «дном вверх». Диапазон углов ±30 — это всего 7% от общего пространства возможных положений капсулы. Вы же не собираетесь задвигать версию о том что сходимость к положению «дном вверх» охватывало подавляющее (>90%) большинство исходных положений капсулы?
Вообще подход с управляемой центровкой не является чем-то уникальным. Его используют SpaceX Dragon, Starliner, будет использовать Orion и наша будущая Федерация. И везде он дает стабильно хорошие результаты.
Serzsh
16.08.2021 16:39Диапазон углов ±30 — это всего 7% от общего пространства возможных положений капсулы.
Вы еще от объема атмосферы посчитайте.
Отклонение в 60 градусов вряд ли можно считать стабильным, а 30 - это половина от 60. Малейшая турбулентность - и привет.
Вообще подход с управляемой центровкой не является чем-то уникальным. Его используют SpaceX Dragon, Starliner, будет использовать Orion и наша будущая Федерация.
Все они имеют одно устойчивое положение. Сама идея спускаемого аппарата с двумя устойчивыми положениями - это русская рулетка.
0serg
16.08.2021 17:13+1Вы еще от объема атмосферы посчитайте.
Нечего возразить по существу? Анализ пространства возможных положений — стандартная практика в изучении свойств динамических систем и их устойчивости.Отклонение в 60 градусов вряд ли можно считать стабильным, а 30 — это половина от 60. Малейшая турбулентность — и привет.
Вы пальцем в небо тыкаете, простите. Внезапного изменения угла атаки на 30 градусов хватит чтобы гражданский авиалайнер уронить в сваливание. Подобное как хорошо известно случается исключительно редко, при исключительно сильной турбулентности и только на малых скоростях где изменение угла соответствует небольшому изменению вертикальной компоненты скорости. На скорости в несколько Махов изменение угла атаки даже на 10 градусов соответствует изменению компоненты скорости встречного ветра на многие сотни км/ч, это очень и очень много, так что чем выше скорость — тем меньше влияние турбулентности на угол атаки. Я уж промолчу про то что на высоте 50 км где идет данный этап полета турбулентности просто нет т.к. это сильно выше тропопаузыВсе они имеют одно устойчивое положение
Все они конструктивно основаны на усеченном конусе и, естественно, имеют два устойчивых положения, с чего вы взяли обратное? Капсула Starliner собственно вообще отличается от Apollo по сути только размерами. Вообще устойчивость капсулы обеспечивается во многом ее правильной центровкой, я уж не стал на этом заострять внимание, но Apollo гораздо устойчивее в «правильном» положении чем в «неправильном» и из положения «отклонение на 60 градусов» вполне себе вернется в исходное, там просто теплозащита на подобные трюки не рассчитана.
Serzsh
16.08.2021 20:39Нечего возразить по существу? Анализ пространства возможных положений — стандартная практика в изучении свойств динамических систем и их устойчивости.
Да, профессионально устойчивостью динамических систем не занимался, для меня более наглядно сравнивать величину "рабочих" отклонений с допустимыми.
Внезапного изменения угла атаки на 30 градусов хватит чтобы гражданский авиалайнер уронить в сваливание.
Авиалайнер имеет отклоняемые аэродинамические поверхности, позволяющие парировать возникающие отклонения. Недостаточная управляемость может стать причиной аварии. Балансирное управление спускаемым аппаратом не позволяет вернуть спускаемый аппарат в нормальное положение при опрокидывании. Причиной опрокидывания может послужить не отделившийся элемент, механическое повреждение, нарушающее симметрию, кратковременный сбой системы коррекции - все эти и многие другие причины могут завершиться аварией.
Невозможность вывести аппарат из нештатной ситуации, не доводя ее до аварийной было, есть и будет причиной аварий.
Да, все причины аварий устранить невозможно, но, закладывать в конструкцию их специально - верх непрофессионализма или открытое признание того, что этот аппарат для реального полета не предназначен.
Все они конструктивно основаны на усеченном конусе и, естественно, имеют два устойчивых положения, с чего вы взяли обратное?
С того, что все они имеют соотношение высота - площадь основания приближенное к СА Союза, который тоже основан на усеченном конусе, но, имеет одно устойчивое положение - конусом вверх, в которое возвращается при любых отклонениях. А соотношение размеров СА Аполлона делает положение конусом вниз устойчивым при всех возможных реальных вариантах расположения центра тяжести.
0serg
16.08.2021 21:28Авиалайнер имеет отклоняемые аэродинамические поверхности, позволяющие парировать возникающие отклонения.
Ну так у Apollo тоже была возможность парировать возникающие отклонения. Без отклоняемых аэродинамических поверхностей, но он управлялся и возмущения умел парировать.Невозможность вывести аппарат из нештатной ситуации, не доводя ее до аварийной было, есть и будет причиной аварий.
В свою очередь скажем конструктивные особенности Ту-154 таковы что после сваливания его аэродинамические поверхности зачастую уже не могут вывести его из нового устойчивого состояния («плоского штопора»). Возмущение на 30 градусов для него будет фатальным. Тем не менее Ту-154 весьма успешно летали много лет и по описанной причине было потеряно всего несколько машин, причем все — из-за ошибки пилотов выводивших машину вплотную к диапазону сваливания а не случайных возмущений.Да, все причины аварий устранить невозможно, но, закладывать в конструкцию их специально
Списываем Ту-154 в утиль или как?С того, что все они имеют соотношение высота — площадь основания приближенное к СА Союза
Starliner — это копия Аполло по указанному соотношению «высота-площадь основания». «Федерация» — на полпути к Аполло. Некоторое сходство с Союзом только у Дрэгона, но и он ушел по данному критерию в «худшую» сторону по сравнению с Союзом. Проще говоря никто не пытается копировать Союз, но многие подражают Аполло.кратковременный сбой системы коррекции
Ну и завершим тем что вы полностью проигнорировали мои возражения по тому что внезапное отклонение на 30 градусов на высокой скорости невозможно. Как впрочем и замечание что из положения «отклонение на 60» аппарат естественным образом вернется обратно в 30.
Serzsh
16.08.2021 23:32Ну так у Apollo тоже была возможность парировать возникающие отклонения. Без отклоняемых аэродинамических поверхностей, но он управлялся и возмущения умел парировать.
Насколько я понял, вы ни разу не управляли ни одним летательным аппаратом. Управляемость - она разная бывает. Даже при балансирном управлении. Кирпич с изменяемым центром тяжести - это не дельтаплан. Говорить о способности что - либо парировать у конуса с изменяемым центром тяжести - это даже не анекдот, а плоская шутка.
В свою очередь скажем конструктивные особенности Ту-154 таковы что после сваливания его аэродинамические поверхности зачастую уже не могут вывести его из нового устойчивого состояния («плоского штопора»).
Самолеты и планеры сваливаются только при потере скорости. Но, без скорости они и не летают. Перед потерей скорости у пилота более, чем достаточно времени и средств для предотвращения данной ситуации. В отличие от спускаемого аппарата, который может изначально оказаться в критической ситуации.
Starliner — это копия Аполло по указанному соотношению «высота-площадь основания». «Федерация» — на полпути к Аполло. Некоторое сходство с Союзом только у Дрэгона,
То то я смотрю, что Дрегон летал успешно )))
Ну и завершим тем что вы полностью проигнорировали мои возражения по тому что внезапное отклонение на 30 градусов на высокой скорости невозможно. Как впрочем и замечание что из положения «отклонение на 60» аппарат естественным образом вернется обратно в 30.
Да вы, батенька, оптимист )))
К сожалению, а, иногда и к счастью, в жизни очень многое возможно, что выходит за рамки расчетов. Конструирование ЛА - это, кроме всего прочего, попытка угадать, где заранее "соломки подстелить", а, вовсе не "ямку вырыть".
0serg
17.08.2021 12:48Самолеты и планеры сваливаются только при потере скорости. Но, без скорости они и не летают
Совершенно верно. В обсуждаемом случае проблем с недостатком скорости, мягко говоря, нет.В отличие от спускаемого аппарата, который может изначально оказаться в критической ситуации.
Вы упорно игнорируете банальную вещь: сваливание происходит не при недостатке скорости. Оно происходит при выходе на углы атаки больше угла сваливания. Это азы аэродинамики. Скорость в этом уравнении возникает потому что в точке где наступает сваливание достигается и максимум подъемной силы а чем медленнее летит самолет — тем подъемная сила меньше, соответственно на низких скоростях пилотам чтобы не упасть приходится использовать углы атаки которые все ближе и ближе к углу сваливания. Но первична не скорость (она на разной высоте будет разной вплоть до сверхзвуковой на достаточно большой высоте) а угол атаки. И внезапное изменение угла атаки на 30 градусов — это гарантированное сваливание. А на большой скорости — гарантированная катастрофа из-за перегрузок. Но ваш вариант «было 30 и ВДРУГ стало 60» к счастью в реальной жизни не встречается, иначе бы катастрофы случались ежедневно. И уж точно подобное не вызывается турбулентностью, поскольку чем выше скорость и высота — тем меньше влияние турбулентности, а на обсуждаемом диапазоне ее влияние практически равно нулю.Конструирование ЛА — это, кроме всего прочего, попытка угадать, где заранее «соломки подстелить», а, вовсе не «ямку вырыть».
Конструирование ЛА — это поиск компромисса между противоречивыми требованиями. За устранение теоретической возможности входа в атмосферу неверной стороной Союз заплатил худшей точностью посадки и большими перегрузками. Для Аполло возращающегося с лунной орбиты на большой скорости вопрос перегрузок был приоритетнее так что выбор выглядит разумным. Собственно это и по остальным кораблям видно — все то что изначально планируется именно для полетов к Луне активно косплеит именно Аполло.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Serzsh
10.08.2021 22:46+1Не совсем понял, почему вы берете скорость истечения 1000 – 2100 м/с? По данным, приведенным в Таблице 1: MSL Requirements vs. Demonstrated и на Figure 7. Qualification Test Specific Impulse vs. Thrust, удельный импульс меняется в пределах от 204 до 223 sec при изменении тяги от минимальной до максимальной, что соответствует изменению скорости истечения от 2001 до 2188 м/сек.
При торможении продуктов разложения гидразина, летящих со скоростью U = 2000м/с, приращение температуры составит (упрощенно) : ΔT = µU2/2Cp (U2 - это Uквадрат)
Если считать разложение гидразина полным, то N2H4 = N2 + 2H2. Молярная масса продуктов разложения µ = 0,0107кг/моль, молярная теплоемкость при постоянном давлении Cp = 2702,5 Дж/кг*К, ΔT = 741,6К.
Осталось прибавить приведенные Вами 202К и получить 943К или 670С.
На максимальной тяге скорость истечения 2188м/с и разогрев при торможении до 1097К, или 816С, что хорошо согласуется с данными измерений на Figure 8: 815С на стенке КС после 40 секунд работы. (Процесс разгона в сопле Лаваля адиабатический и нагрев при торможении равен охлаждению при разгоне).
Теперь понятно в чем «фокус» - американцы решили потерять в двигателях MR80B 9% скорости истечения (максимальные 2188м/с против возможных 2400м/с) и тащить дополнительно 34 кг топлива для снижения температуры в КС с 1380С до 815С и продления ресурса катализатора.
Получается, что при 670С пыль светиться будет (немного ярче, чем двигатели на фото "крана" – у пыли степень черноты больше, чем у нержавейки). Вопрос только в том, при какой освещенности это будет видно?
dcoder_mm Автор
10.08.2021 23:08-2ΔT = µU2/2Cp
Вместе с формулами принято писать что значат разные буквы в них, и что именно это за формула и где она применима. Я вот уже успел забыть то немногое, что знал о газодинамике и не помню что это за формула.
Вы говорите о том, что газ нагреется до 670°С когда потеряет всю кинетическую энергию. Но мы не видим этого момента: поток газа отражается от земли и разлетается в разные стороны.
На максимальной тяге скорость истечения 2188м/с
Когда была максимальная тяга, камеры еще не работали. То что мы видим на фреймах — это половина тяги.
Serzsh
11.08.2021 00:24+1Вместе с формулами принято писать что значат разные буквы в них, и что именно это за формула и где она применима. Я вот уже успел забыть то немногое, что знал о газодинамике и не помню что это за формула.
описание букв находится в тексте:
При торможении продуктов разложения гидразина, летящих со скоростью U = 2000м/с, приращение температуры составит (упрощенно) : ΔT = µU2/2Cp (U2 - это Uквадрат)
Если считать разложение гидразина полным, то N2H4 = N2 + 2H2. Молярная масса продуктов разложения µ = 0,0107кг/моль, молярная теплоемкость при постоянном давлении Cp = 2702,5 Дж/кг*К, ΔT = 741,6К.
Формула - кинетическая энергия одного моля, деленная на теплоемкость одного моля. Энергия, деленная на теплоемкость дает температуру нагрева
Е = mV2/2 (е равняется эм вэ квадрат пополам) = энергия, выделившаяся при торможении массы m а если вместо m подставить µ, то будет энергия торможения одного моля. А если эту энергию разделить на теплоемкость одного моля то получится температура нагрева этого моля.
Вы говорите о том, что газ нагреется до 670°С когда потеряет всю кинетическую энергию. Но мы не видим этого момента: поток газа отражается от земли и разлетается в разные стороны.
Мы видим этот момент, когда в сверхзвуковой поток попадает частица пыли, скорость которой пренебрежимо мала по сравнению со скоростью потока. При соударении с ней кинетическая энергия молекул газа переходит в тепловую. При этом происходит кратковременный нагрев до температуры заторможенного потока. После разгона до скорости потока, нагрев прекращается и частица пыли остывает до температуры движущегося потока.
Когда была максимальная тяга, камеры еще не работали. То что мы видим на фреймах — это половина тяги.
Правильно, при минимальной тяге скорость истечения 2001 м/с (Table 1), расчет нагрева при торможении дает 670 С , поэтому и двигатели светят так тускло.
А расчет при максимальной тяге и скорости истечения 2188 м/с сделан для проверки.
dcoder_mm Автор
11.08.2021 00:34Мы видим этот момент, когда в сверхзвуковой поток попадает частица пыли, скорость которой пренебрежимо мала по сравнению со скоростью потока
Какая масса газа передает энергию одной частице? Какую часть энергии она успевает передать, перед тем как частица улетит из фрейма?
Serzsh
11.08.2021 00:44+1Какая масса газа передает энергию одной частице? Какую часть энергии она успевает передать, перед тем как частица улетит из фрейма?
А вот это и есть те самые "многие неизвестные", которые радикально меняют всю картину в зависимости от массы пылевой частицы )))
Но, дело даже не в этом - короткое и тусклое свечение камера вряд ли успеет зафиксировать.
dcoder_mm Автор
11.08.2021 00:48Да какие многие неизвестные? У вас есть скорость потока, плотности, возьмите массу частицы какую-нибудь.
Serzsh
11.08.2021 01:26Осталось только посмотреть в справочнике формулу коэффициента сопротивления для микрочастиц при ударном обтекании их сверхзвуковым потоком.
dcoder_mm Автор
11.08.2021 01:28Тогда к чему были все эти ваши утверждения выше, о том что она обязана нагреваться до известной вам температуры?
Serzsh
11.08.2021 02:09К тому, что обычно так и происходит. А расчет позволяет определить граничные параметры, подтверждающие ваши утверждения о том, что на фотографиях это явление отображено не будет.
dcoder_mm Автор
11.08.2021 11:27+1обычно так и происходит
Это не аргумент, вы же понимаете? Я не каждый день вижу как холодные сверхзвуковые потоки тормозятся о всякое. Вы бы лучше не автоген а SR-71 как пример привели: летает высоко, где холодно, а греется как черт. Звучит более убедительно. Но опять-же, пыль унесет раньше чем мы что-то заметим.
подтверждающие ваши утверждения о том
Вы поймите, нет у меня никаких утверждений. Вы за все эти три дня ни разу не спорили со мной: вы спорили с парой PDF документов и ссылок из гугла. У меня нет никаких экспертных знаний, которых не было бы у вас, понимаете? Вы должны были найти всё это и проверить свои утверждения, а не перекладывать эту простую (но несколько рутинную) работу на других. Продолжать разговор про двигатели мне было интересно только потому, что я ничерта о них не знал, и было интересно почитать.
P.S. Пожалуйста, отвечайте на комментарий а не на саму статью. Так все комментарии соберутся в одну ветку, и те люди, которым не интересно читать нас, смогут её свернуть одним нажатием.
Serzsh
11.08.2021 17:51-1Вы за все эти три дня ни разу не спорили со мной
А в чем спорить с Вами? Статью Вы сделали отлично, никаких замечаний по самой статье нет. Я высказал сомнения только по поводу реальности пребывания на Марсе объекта анализа, проведенного в статье, а не по поводу самого анализа.
Вы должны были найти всё это и проверить свои утверждения, а не перекладывать эту простую (но несколько рутинную) работу на других.
Если у меня есть ссылки на источники - я ими с удовольствием делюсь. Мы ведь не в молчанку играем. Или я должен радоваться тому, что собеседник потратит несколько лишних часов на поиск тех данных, которые я уже нашел?
v1000
Немного напомнило nVidia с ее демкой трассировки лучей в реальном времени для визуализации посадочного модуля Аполлона 11.