
Обычно, когда речь заходит о роботах, мы представляем что-то либо человекообразное, либо похожее на танк или кран. Однако мир робототехники намного разнообразнее, ибо создатели таких устройств черпают вдохновение из самых разных источников: литература (особенно научная фантастика), природа, детские рисунки и многое другое. Практика показала, что у любого объекта (живого или нет) может появиться роботизированный аналог: робот-паук, робот-рыба, робот-вертолет, робот-пылесос, робот-лента для гимнастики. Последнее может и вызывает непроизвольное поднятие одной брови в гримасе удивления и непонимания, но как еще назвать творение ученых из Тяньцзиньского университета (Китай). Они разработали гибкого самоходного робота, созданного с помощью 4D-печати? В неактивном состоянии он похож на кусок плоской ленты, но при воздействии тепла его форма меняется на спиралевидную (становится похожа на липкую ленту для мух) или цилиндрическую. В таком скрученном виде робот способен передвигаться, реагировать на контакт с другими объектами и даже перемещать груз. Из чего же сделана эта чудо-лента, какие принципы заложены в ее трансформации, и где можно было бы применить эту разработку? Ответы на эти вопросы мы найдем в докладе ученых. Поехали.
Основа исследования
Одним из самых очевидных преимуществ гибких роботов перед «жесткими» является тот факт, что они могут ввиду своей изменчивой формы проникать в труднодоступные места. Это может пригодиться и при разборе завалов и поиске пострадавших, и при исследовании местности со сложным рельефом. А еще они куда безопаснее в аспекте взаимодействия с человеком. Проблема в том, что обычных роботов создавать намного проще, тогда как создание гибких до сих пор сопряжено с массой проблем, начиная подбором материалов и заканчивая сборкой.
И тут могут пригодиться технологии аддитивного производства, а именно 3D- и 4D-печать, отличающаяся от трехмерной тем, что форма созданных таким образом объектом может в последствии меняться, как запланировали создатели.
Однако и в 4D-печати есть свои проблемы, а именно ограничения в подборе материалов. Например, полимеры с памятью формы требуют механической обработки после печати для достижения деформирующей способности, что увеличивает нестабильность производства. В то время как деформация гидрогелей ограничивается тем фактом, что их можно использовать только в воде.
Интересным вариантом для гибких роботов, по мнению ученых, является жидкокристаллический эластомер (LCE от liquid crystal elastomer). LCE уже используются для разработки искусственных мышц благодаря своей уникальной анизотропии жидкокристаллической фазы и эластичности полимерных сеток. Но еще важнее то, что LCE в ответ на определенный раздражитель могут претерпевать обратимые и анизотропные деформации, т.е. временно менять форму.
В рассматриваемом нами сегодня труде ученые создали гибкого робота именно на базе LCE. В случае термического воздействия робот способен менять свою форму без каких-либо дополнительных механических воздействий (1A). Напечатанные образцы прямоугольной формы превращаются в цилиндры при нагревании до температуры выше 160 °C и самостоятельно начинают передвигаться по нагревательной подложке. Полость внутри цилиндра позволяет наполнить робота каким-то грузом, при этом максимальная нагрузка может достигать 40-кратной массы робота.
Результаты исследования
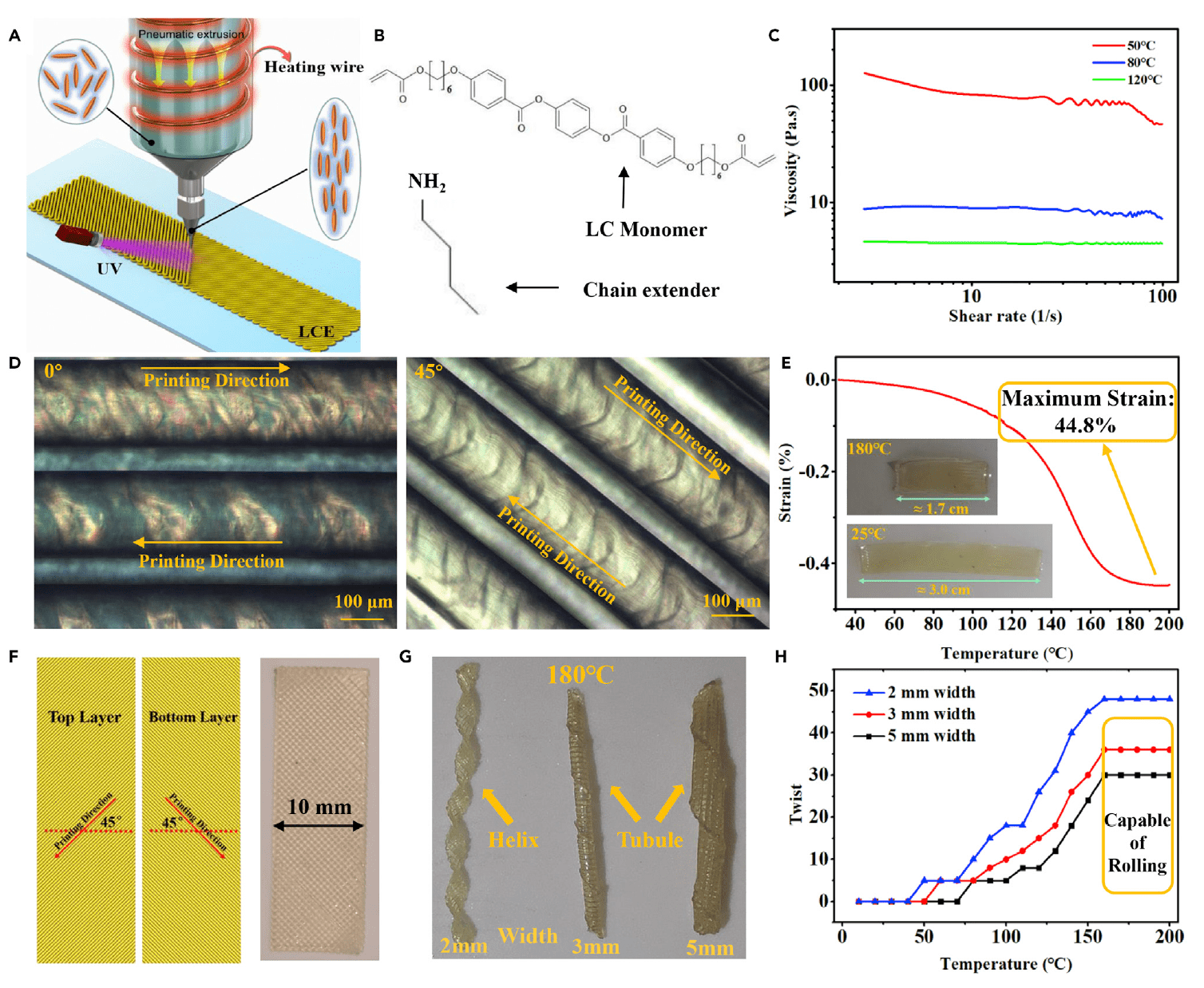
Основной метод, задействованный при создании робота, это HOT-DIW (от high-operating-temperature direct ink writing), позволяющий достигать изменчивости формы эластичных материалов при обработке. Краска, использованная при HOT-DIW, переставляла собой некаталитическую смесь (1B).
Изображение №1
Предварительно запрограммированный G-code* позволял изменять скорость и схему печати.
G-code* — язык программирования устройств с числовым программным управлением. Используется для создания команд, реализуемых различными станками.3D-принтер использовался для печати ЖК чернил (жидкокристаллических чернил) при температуре в диапазоне от -18 °C (Tg, температура стеклования) до 100 °C (TNI, температура перехода из нематической фазы в изотропную фазу). В этом диапазоне температур ЖК демонстрирует необходимую для печати вязкость (1C). Установка HOT-DIW состояла из воздушного насоса, дозатора, нагревательного цилиндра, платформы трехмерного позиционирования и УФ-лампы (1A). Ориентация LCE нитей во время печати регулировалась на основе изображений поляризационного микроскопа.
Для получения LCE образцов с тонкой морфологией необходимо было точно откалибровать параметры печати. Чтобы обеспечить согласованность между давлением экструзии и скоростью печати, давление воздуха поддерживалось на уровне 2.0 МПа. Сканирование поляризационным микроскопом показало, что образцы обладают правильной ориентацией, регулярной морфологией и приемлемо малым числом дефектов, если скорость печати не превышает 10 мм/с. При этом толщина образца уменьшается с увеличением скорости печати. Толщина образца наиболее правильной морфологии составила 0.25 мм.
Когда однослойные LCE образцы подвергались нагреву до температуры выше 160 °C, они сжимались в направлении печати и расширялись в направлении, перпендикулярном печати. Таким образом, при оптимальной скорости печати можно было получить максимальную деформацию вдоль направления печати более 40% (1E). Максимальная деформация перпендикулярно печати составила 25%.
Полученные в результате печати двухслойные LCE образцы представляют собой двухслойные прямоугольные структуры с разницей в 90° между верхним и нижним направлениями печати и общим направлением печати под углом 45° к длинной оси (1F).
Дабы реализовать термически-зависимое движение (перекатывание), необходимо было нагреть образец до образования цилиндрической формы (1G). Образцы шириной 2 мм демонстрировали изгиб 48° на длину, тогда как образцы шириной 5 мм демонстрировали изгиб 30° (1H).
Однако спираль, образованная из плоского образца, не обеспечивала устойчивое и стабильное перекатывание. Только когда отпечатанный образец был достаточно широким, чтобы образовать трубочку (цилиндр), наблюдалось устойчивое движение в направлении кривизны. Это связано с тем, что по окружности цилиндра существует растягивающая сила, создаваемая широким образцом под действием температурного градиента.
В частности, в прямоугольных структурах с разницей в 90° в ориентации между верхним и нижним слоями (2А) нагрев вызывает несовместимые деформации, что приводит к деформациям вне плоскости. Когда LCE образец помещается на нагревательную пластину с температурой 180 °C, возникает температурный градиент между нижней и верхней поверхностями цилиндра. Из-за наличия температурного градиента нижняя часть сжимается, а верхняя расширяется, тем самым нарушая баланс сил и придавая образцу способность перекатываться.

Изображение №2
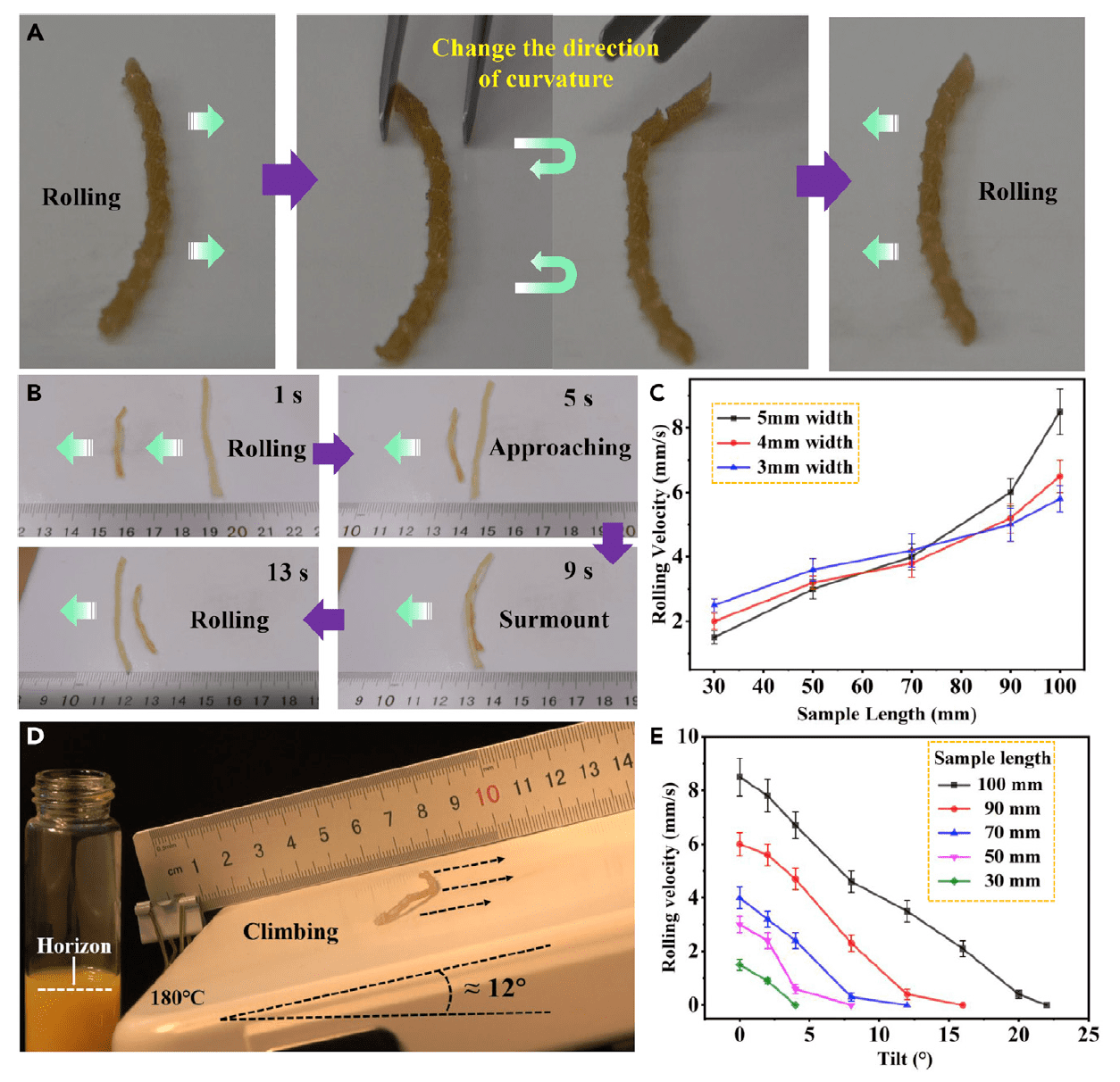
На изображениях 2B и 2C показаны процессы деформации и перекатывания соответственно. Образец LCE шириной 5 мм и длиной 10 см, помещенный на горячую пластину (180 °C) скручивается в трубочку в течение 20 секунд и начинает катиться автоматически (2B).
Видео №1: преобразование ленты в спиралевидный цилиндр.
Во время перекатывания слева на нагревательной пластине была размещена стеклянная трубка в качестве стартовой линии и визуального маркера (2C).
Видео №2: перекатывание робота на ровной и наклонной поверхности.
Когда нагревательная пластина была горизонтальной, образец LCE катился в направлении собственной кривизны со скоростью примерно 48 см/мин. Когда правая сторона пластины была поднята, образец продолжал катиться вверх по склону, а стеклянная трубка свалилась вниз. Ученые отмечают, что весь процесс передвижения образца был автоматическим без изменения факторов окружающей среды, что выгодно отличает данную разработку от других гибких роботов, способных двигаться только при наличии внешнего контроля.
Изображение №3
Благодаря гибкости материала и самой морфологии робота его самостоятельное движение можно было легко изменить активно или пассивно (3A).
Видео №3: перекатывание робота на плоской поверхности.
По сравнению с существующими мягкими роботами, управляемыми светом и магнитами, в которых направление света или магнитного поля должно изменяться для управления направлением движения, предлагаемый робот просто требует небольшого изменения направления кривизны без изменения факторов окружающей среды.
Образцы, чья длина не превышала 5 см, не могли сохранять стабильное направление движения и начинали катиться в противоположную сторону. Если же длина была более 5 см, то и движение совершалось стабильно по одному направлению. Посему для практических опытов были изготовлены образцы длиной от 7 до 10 см.
Во время перекатывания увеличение сопротивления снизу существенно меньше, чем напряжение термической усадки волокон для трубок разной длины, потому что цилиндрическая форма поддерживает контакт с горячей пластиной по единственной прямой линии. Следовательно, более длинные образцы с большей движущей силой катятся быстрее, чем более короткие образцы.
Максимальная скорость движения образца длиной 10 см может достигать 48 см/мин, что позволяет догнать образец длиной 7 см, как это видно на 3В.
Видео №4: гонка роботов длиной 7 и 10 см.
В аспекте ширины образца также наблюдалась некая корреляция: более узкие образцы двигались быстрее, если они были короче, а более широкие, если были длиннее. Оптимальный параметр ширины составил 5 мм, как показали сравнительные опыты.
Согласно термогравиметрической кривой, оптимальная рабочая температура образца составляет от 180 °C до 250 °C. Скорость образца длиной 10 см уменьшается с 48 до 36 см/мин после того, как он подвергался выдержке в печи при 180 °C в течение приблизительно 40 часов. При этом стабильность перекатывания оставалась на прежнем уровне.
Как уже упоминалось ранее, образцы были способны двигаться вверх по склону. Скорость движения уменьшалась с увеличением угла наклона. Более длинные образцы могли продолжать движение при большем угле, чем короткие (3E) из-за их большей движущей силы.
Видео №5: движение робота вверх по склону.
Ученые отмечают, что использование одного материала для производства всего робота плюс изменение его геометрии позволяют наделить его способностью интеллектуального восприятия. Поскольку легкое прикосновение может изменить направление кривизны для управления направлением перекатывания робота, он может автоматически реагировать на внешние силы при столкновении с препятствиями, подобно насекомому с парой антенн.
Изображение №4
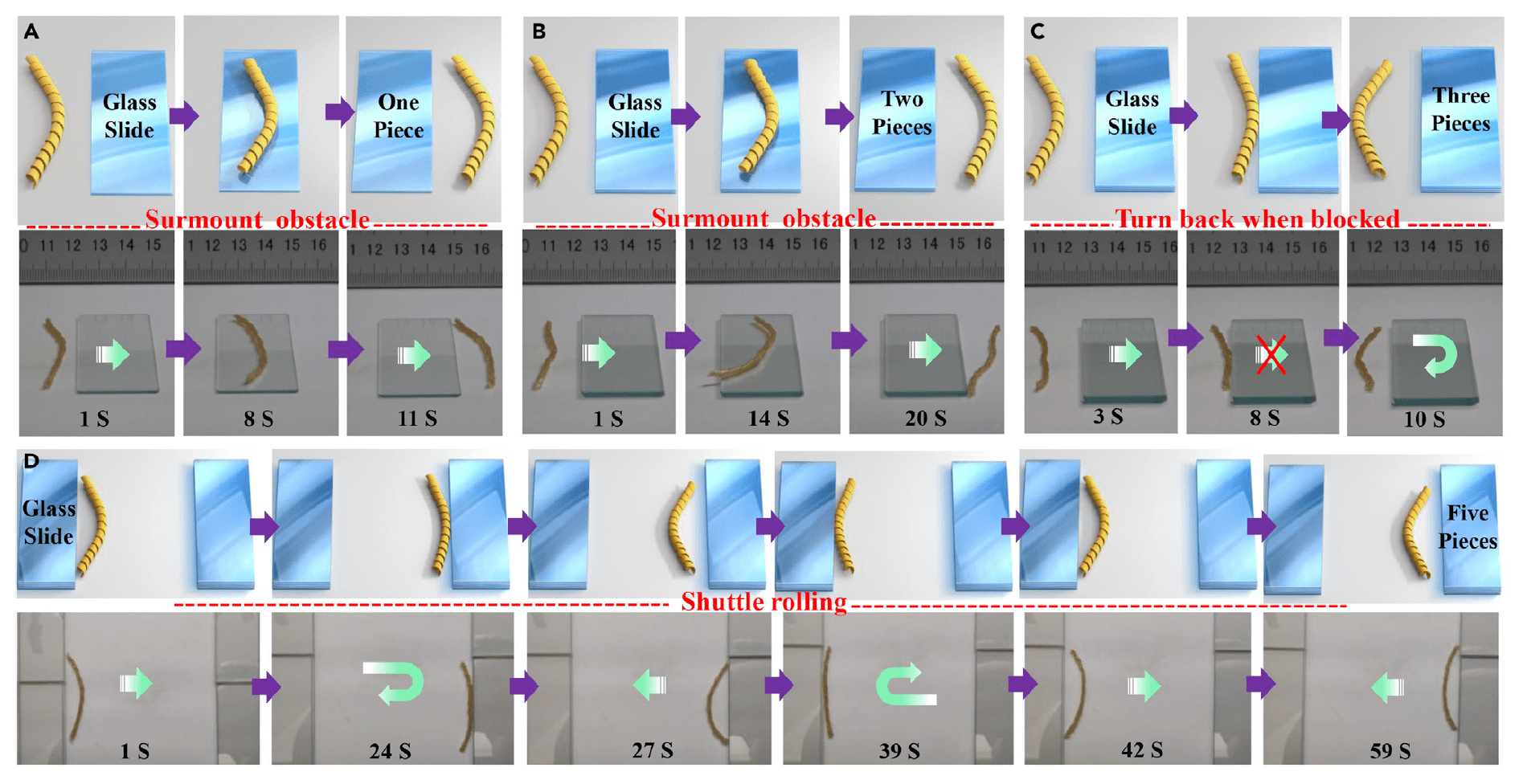
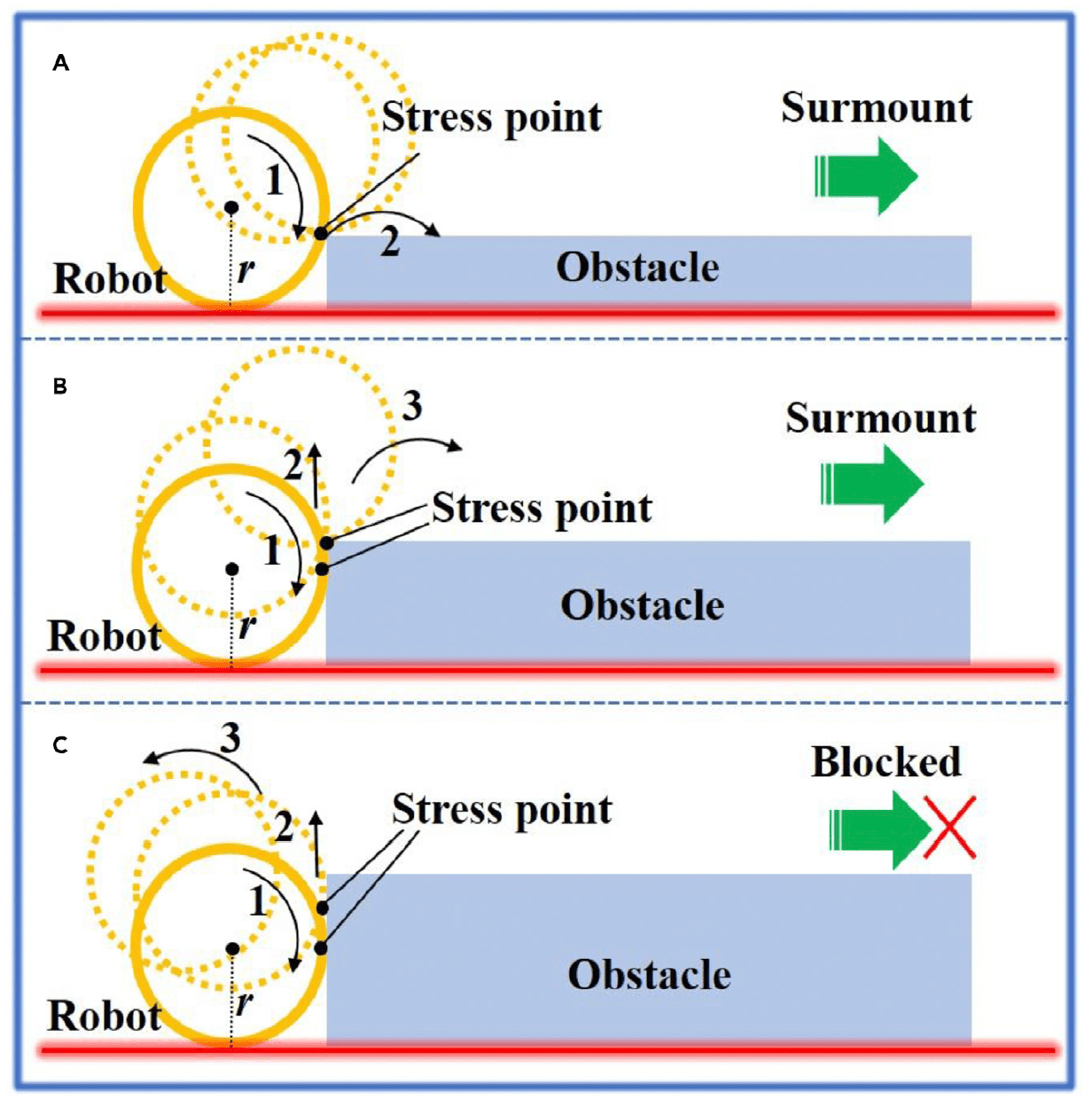
На снимках выше показаны предметные стекла (слайды), установленные на пути движения робота в качестве препятствия. Когда робот длиной 10 см сталкивается с одним (4A) или двумя (4B), он спокойно их преодолевает и движется дальше. Но при встрече с тремя слайдами (4C), робот застревает, направление кривизны меняется, и он начинает двигаться в обратную сторону.
Видео №6: преодоление препятствия (1 слайд и 2 слайда) и смена направления движения (3 слайда).
Видео №7: движение при наличии слайдов по бокам от робота.
Дополнительно был проведен опыт, в котором более трех слайдов было помещено по обеим сторонам от робота длиной 10 см (4D). Результаты опыта подтверждают, что робот автоматически меняет свое направление после столкновения с препятствиями на обоих концах, и этот процесс продолжается до тех пор, пока образец случайно не отклонится от центра нагревательной пластины. В теории, при идеальных термических условиях робот будет перекатываться туда-сюда бесконечно.
Схема данного процесса показана на изображении 5A. Радиус цилиндра составляет примерно 1.2 мм, тогда как толщина предметного стекла составляет примерно 1.1 мм. Чтобы преодолеть предметное стекло, требуется точка напряжения, позволяющая поднять образец над стеклом. Следовательно, радиус образца должен превышать толщину предметного стекла.
Изображение №5
Если робот катится по нагревательной поверхности достаточно близко к стеклу, то ему не удастся преодолеть два сложенных слайда (один на один), так как их высота будет больше его радиуса. Однако, если робот изначально был заблокирован двумя слайдами, его передняя часть поднималась (5B) из-за возникновения точки напряжения, позволяющей преодолеть препятствие.
Но в случае с тремя слайдами робот, хоть и приподнимался, но преодолеть столь высокое препятствие не мог, так как не было создано точки напряжения (5C). Опыты также показали, что роботы длиной более 5 см куда лучше справлялись с препятствиями, чем более короткие роботы, которые даже при небольшом препятствии меняли направление движения.
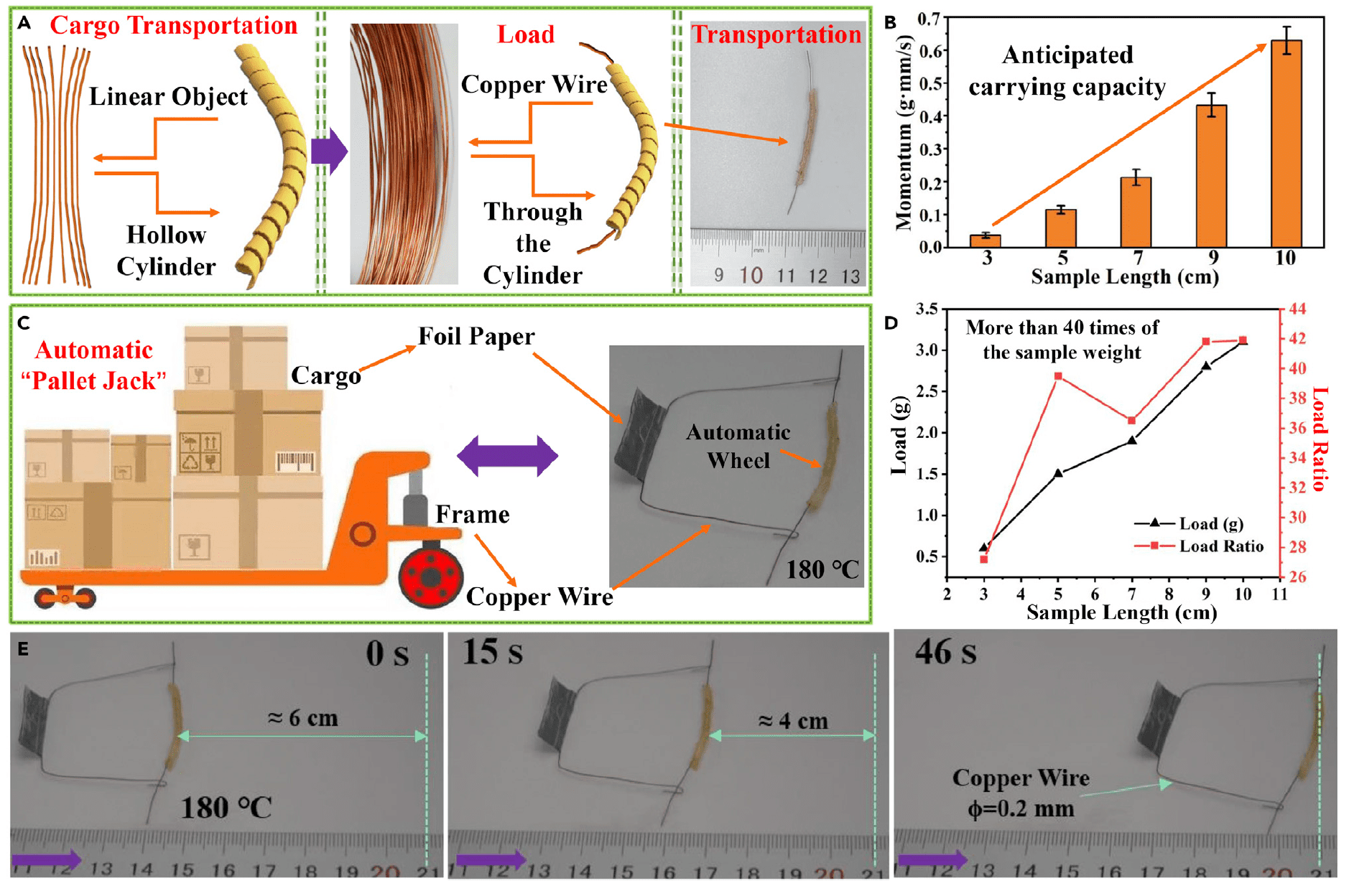
Учитывая полую форму робота (6A), ученые предположили, что его можно использовать для транспортировки грузов.
Изображение №6
Опыты показали, что размещение в полости нескольких медных проводов никак не влияло на динамику движения робота.
Видео №8: перетягивание груза.
Более длинные образцы с большей скоростью и массой (6B) демонстрируют больший импульс. Это указывает на то, что они теоретически могут обладать большей нагрузочной способностью. Максимальная масса, которую может перемещать робот длиной 10 см, составляет 6 грамм, что примерно в 100 раз больше его собственной массы.
Однако, полость достаточно мала, чтобы загрузить ее большим грузом. Потому ученые создали «прицеп» (6C). Робот длиной 10 см мог переместить на расстояние в 5 см прицеп массой 3 грамма, а робот длиной 5 см мог тянуть груз, масса которого превышала его собственную в 40 раз (6D). При этом все варианты прицепов двигались со стабильной скоростью и направлением (6E).
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых и дополнительные материалы к нему.
Эпилог
Создание роботов присутствует в списке желаний человека уже очень давно. Даже Леонардо да Винчи экспериментировал с подобными технологиями. В 50-ых годах прошлого века были найдены чертежи его механизированного робота, датируемые 1495 годом. С развитием научной фантастики в литературе и кинематографе интерес к роботам только возрос. Однако, многие футуристичные концепции роботов оказались либо слишком сложными для реализации, либо не особо практичными. К примеру, когда-то ученых спросили, можно ли создать робота-трансформера, как в одноименном фильме. Ученые ответили утвердительно, дополнив свой ответ встречным вопросом: «а зачем?». Ибо создать робота и машину отдельно будет куда проще и практичнее.
Хоть желание построить универсального робота и велико, но реализовать это в «жесткой» оболочке сложно. Именно по этой причине внимание сместилось в сторону гибких роботов, которые могут менять свою форму без необходимости в механическом воздействии. В рассмотренном нами сегодня труде ученые создали действительно уникального робота, состоящего из одно материала, который меняет свои свойства при термической обработке. В результате этого меняется и форма робота, что позволяет ему перекатываться, преодолевая небольшие препятствия.
Конечно, данная разработка находится на зачаточной стадии, и ученым предстоит проделать еще немало работы, прежде чем их детище сможет обзавестись практическим применением. Тем не менее теоретически такие гибкие роботы могут пригодиться и в исследовании труднодоступных для человека регионов, и в поиске пострадавших в случае каких-либо бедствий, и даже в медицине.
Многие люди с опасением относятся к ИИ и роботам (особенно после выхода к/ф «Терминатор»). Если же учесть, как инженеры из Boston Dynamics «издеваются» над своими стальными подчиненными, то подобные опасения становятся не такими уж и надуманными. Данные ролики являются пародией, созданной с помощью компьютерной графики ребятами из Corridor Crew (в ходе съемок ни один робот не пострадал).
Благодарю за внимание, оставайтесь любопытствующими и отличных всем выходных, ребята! :)
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?
Комментарии (9)

LordCarCar
09.10.2021 18:14Если на наклонную плоскость положить шарик, то он покатится? Это тоже робот?

untilx
11.10.2021 14:38Все эти 4D-печати очень сильно напоминают курортные города. Почему только 4? Почему не 8D? Что их останавливает?

Dmytro_Kikot Автор
11.10.2021 17:40+1Если с 3D-печатью все ясно (печать трехмерного объекта методом удаления или добавления материала), то вот 4D-печать подразумевает, что этот объект в последствии может менять свою форму каким-то образом в ответ на изменение параметров окружающей среды (влажность, температура и т.д.). В данном труде печатается пленка (плоская, прямоугольная), но во время воздействия температуры пленка скручивается в цилиндр, т.е. меняет форму.
5D-печать (да, есть и такая) подразумевает печать объекта с пяти осей: печатающая головка установки способна передвигаться по 5 осям, как и основа, на которой печатается объект.
6D-печать подразумевает использование чувств человека и его нейронной активности мозга в печати объектов. Человек подумал про яблоко — принтер его напечатал.
Посему разные цифры обозначают немного разные направления одной технологии, либо сами ученые используют приставку nD для обозначения конкретно своей разработки и того, с чем она связана.untilx
19.10.2021 23:24Это был сарказм. Я понимаю, что все эти приставки означают, но они от этого не выглядят менее забавно
akryukov
Новую серию Терминатора с таким роботом я бы посмотрел с интересом.
Думаю для него подходит название Т999 или даже Т666
Dmytro_Kikot Автор
Сцена, в которой Т1000 проходит сквозь прутья в больнице, преследуя героев, выглядела бы любопытно (мягко говоря) в исполнении робота из данного исследования. :)
akryukov
Я думаю что с такой формой можно придумать что-нибудь поинтереснее. Например что-нибудь в духе Лавкрафта: живет себе ГГ, телохранитель после предыдущего вторжения роботов работает где-нибудь грузчиком. И тут появляется неведомая хрень, про которую никто ничего не знает. А когда все выясняют, то сходят с ума вместо со зрителями в кинозале.
drWhy
Боглодиты вымерли.

2M-Ch
Арнольд Шварценеггер спасает мир в новом триллере "Живая вермишель"