

Одной из основных нужд человека является пища. Если быть точным, то нашему организму нужны питательные вещества, витамины и микроэлементы. А вот форма «подачи» всей этой полезности по сути не имеет значения. Мы вполне могли бы питаться одной и той же жижей на завтрак, обед и ужин, как в фильме «Матрица», главное, чтобы она содержала все, что нужно организму. Но стоит вспомнить сцену беседы Сайфера и Смита в ресторане, как приходит понимание, что вкус пищи для человека порой куда важнее. В реальности же, когда мы что-то готовим, то периодически пробуем свое творение на вкус, определяя тем самым необходимость внести какие-то изменения. Слюна во рту помогает доставить и распределить пробу по вкусовым рецепторам, которые передают сигналы в мозг, обрабатывающий их и принимающий решение (например, добавить больше соли или кориандра). Однако даже во время фактического употребления блюда процесс его дегустации не прекращается, так как жевание пищи меняет ее морфологию, что помогает определить не только вкус, но и состав (т. е. ингредиенты). И вот ученые из Кембриджского университета (Великобритания) решили создать робота, который будет имитировать этот процесс. Из чего состоит робот-дегустатор, каков принцип его работы, и в чем его практическая польза? Ответы на эти вопросы мы найдем в докладе ученых. Поехали.
Основа исследования
Кулинария всегда была неотъемлемой частью истории человечества. В разные времена различные народы придумывали свои уникальные блюда, основанные на ингредиентах, произрастающие в местности их обитания, культурных обычаях и технологическом прогрессе. Использование различных кулинарных инструментов, методов обработки и в будущем специй сделали из готовой еды (например, сырого мяса) лишь ингредиент более сложного, а потому и более вкусного блюда.
В современном мире кулинария превратилась и в хобби, и в технологию, и в искусство. Факт того, что отдельные народы более не разделены непреодолимыми расстояниями благодаря современным методам передвижения (самолеты, корабли, поезда), породил возможность обмениваться не только ингредиентами, но и кулинарными обычаями, знаниями и опытом. Наличие самого разного инвентаря на кухне также способствовало расширению мирового меню. Но, какой бы навороченной ни была кухня, какие бы ингредиенты не использовал повар, вкус будущего блюда определяется всегда по старинке, т. е. дегустацией.
В последние годы большой интерес уделяется робототехнике во всех ее проявлениях: от роботов-пожарных до микроскопических роботов, транспортирующих лекарственные препараты по кровотоку человека. Во всем этом многообразии нашли свое место и роботы-повара, способные самостоятельно готовить вполне сложные блюда. И тут начинают пересекаться две противоположности, а именно точность математики и хаос искусства. Любое блюдо можно разложить на ингредиенты, четко расписав их количество в граммах, что будет понятно роботу. Но, как знает любой, кто готовил когда-то по чужому рецепту, часто для достижения идеального вкуса списка ингредиентов недостаточно.
Одним из самых явных отличий между процедурой приготовления пищи роботами и людьми заключается в том, что мы постоянно пробуем пищу во время приготовления. Более того, процесс жевания усиливает вкусовые ощущения, так как позволяет ощутить изменение вкуса блюда во время механической обработки.
Выделение слюны также является частью процесса жевания, а потому влияет и на дегустацию. Слюна опосредует как минимум два эффекта: смачивание пищи и введение пищеварительных ферментов. Примерами таких эффектов являются таяние кусочка сахара во рту, при котором появляется сильный сладкий вкус, а также сладкий вкус, возникающий после удерживания хлеба во рту в течение умеренно долгого времени, что является эффектом воздействия ферментов слюны.
Попытки имитировать дегустационные способности человека в роботизированной форме были, некоторые из них даже коммерчески доступны. Проблема в том, что для всех «электронных языков» необходима точная и тщательная предварительная обработка любого нежидкого образца. Например, в одной из исследований электронный язык использовался для обнаружения фальсифицированного мяса, но образцы необходимо было измельчать в течение 3 минут. В другом опыте удалось определить вкус тушеной курицы, но для этого потребовалась гомогенизация с дистиллированной водой и центрифугирование.
И, как вы сами понимаете, использовать на реальной кухне центрифугу это уже перебор. Следовательно, вышеперечисленные методы, хоть и рабочие, но не подходят для практического применения в разработке полноценного робота-повара. Авторы рассматриваемого нами сегодня труда решили исправить эту печальную ситуацию, разработав робота, имитирующего процесс жевания, дабы собрать дополнительные данные о вкусе пищи во время ее измельчения.
Опыты показали, что дегустация на нескольких стадиях механической обработки пищи может значительно повысить эффективность классификации пищи с разным количеством одних и тех же ингредиентов. Чтобы проверить концепцию, ученые построили роботизированную установку, оснащенную датчиком солености для измерения вкуса.
Моделирование дегустации
Моделирование процесса дегустации было выполнено в виде серии измерений в разные моменты времени и на разных этапах жевания. Также ученые учли тот факт, что язык человека оснащен множеством рецепторов, распределенных по его поверхности. Эта особенность представлена в эксперименте дегустацией в нескольких точках и представлением вкуса в виде набора измерений. Робот, оснащенный датчиком солености, также имел и роботизированную руку, что позволяло физически перемещать датчик в разные точки блюда.

Изображение №1
Стоит отметить, что пережевывание — это процесс дробления и измельчения пищи, основная цель которого — уменьшить средний размер пищевых частиц. Меньшие частицы представляют собой большую площадь поверхности для повышения эффективности пищеварительных ферментов. Однако жевание также играет важную роль в процессе дегустации, так как при жевании вкус меняется. Тестируемая установка имитирует это с помощью миксера (изображение №1).
Каждая модель дегустации нуждается в вычислительном компоненте для получения значимого сигнала, в противном случае он остается лишь набором измерений. В данном случае использовались ранее установленные вкусовые метрики («Closed-Loop Robotic Cooking of Scrambled Eggs with a Salinity-based ‘Taste’ Sensor») для уменьшения размерности данных. Эти вкусовые показатели относятся к средней солености и «смешанности» блюда. Затем различные подмножества этих выборок используются для обучения и проверки классификатора опорных векторов (справа на изображении №1).
Робот воссоздает вкус солености с помощью датчика проводимости. Датчик проводимости определяет степень легкости прохождения тока через образец. Это достигается путем измерения тока, протекающего через образец между двумя электродами при заданном напряжении. Доминирующим механизмом проводимости является движение ионов, поэтому соленость увеличивается с концентрацией ионов, подвижностью ионов и ионным зарядом.
Для данного опыта использовался стандартный датчик солености ExTech. Процесс калибровки был стандартным, как и размещение образца на непроводящую (керамическую) пластину.
Подготовка к опытам
Экспериментальная установка (изображение №2) состоит из робота-манипулятора UR5, оснащенного датчиком вкуса на основе проводимости. Датчик размещается на месте эффектора и управляется платой Arduino UNO, которая обеспечивает интерфейс к ноутбуку через USB.

Изображение №2
Датчик способен достигать частоты дискретизации 2 Гц, включая все сопряжения с ноутбуком и сохранение данных. Манипулятор UR5 также управляется ноутбуком, что фактически делает ноутбук центром всей системы. Для обработки информации с датчика, ее хранения и анализа использовался Python.
Образцы (т. е. яичница с томатами) готовились на сковороде на индукционной плите. Использованное количество соли было отмерено с помощью весов с точностью до 0.05 г. Фарфоровая тарелка использовалась в качестве водонепроницаемой и неэлектропроводной платформы для дегустируемого блюда. Процесс пережевывания имитировался с помощью миксера.
Приготовленные для тестов блюда содержали только три ингредиента (яйца, томаты и соль), т. е. масло для жарки не использовалось, чтобы блюдо получилось более однородное. Масса и габариты всех ингредиентов были измерены (таблица №1).

Таблица №1
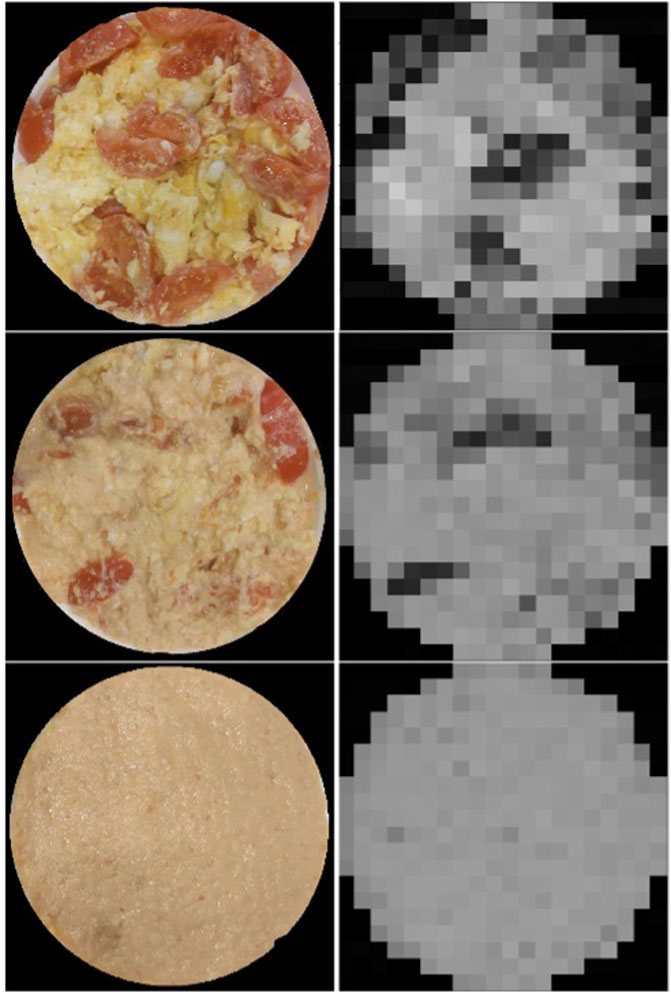
Информация о вкусе, полученная в ходе экспериментов, может быть картирована и показана в виде изображения, что упрощает анализ данных. Экспериментальная установка создает карту вкуса на основе двух параметров: количество контрольных точек и размер тарелки. Контрольные точки размещаются на квадратной сетке, которая создается путем построения квадрата вокруг пластины с длиной стороны, равной диаметру пластины. Затем внутри квадрата равномерно распределяется необходимое количество контрольных точек. Это число ограничено квадратами целых чисел, чтобы гарантировать размещение контрольных точек на квадратной сетке. На следующем шаге проверяется, какая из точек лежит внутри пластины, а не в той части квадрата, которая находится вне пластины. Отбираются только точки внутри пластины, а значение всех остальных точек устанавливается равным 0 (пример такого картирования показан ниже).

Изображение №3
Во время экспериментов была поставлена задача по классификации блюд, что позволяло оценить каждый из методов дегустации. Для опытов было приготовлено 9 вариантов блюд (таблица №2) с разным содержанием яиц, томатов (0, 3 или 6 шт.) или соли (0, 1.2 г или 2.4 г).

Таблица №2
Каждое из полученных блюд подвергалось обработке, показанной на схеме ниже.

Изображение №4
После охлаждения подготовленных блюд была проведена первая дегустация 400 образцов, разложенных на площади 16х16 см. Ученые уточняют, что это число является результатом компромисса между временем, необходимым для экспериментов, и созданием достаточно большого набора данных: 400 образцов достаточно для обучения, а сбор большего количества затруднен из-за размера зонда (расстояние между электродами около 1 см). Из этих 400 образцов 324 лежат внутри пластины и становятся контрольными точками.
Каждое блюдо дегустировалось трижды, но для классификации использовались только первая и последняя дегустации, чтобы улучшить воспроизводимость эксперимента. Первая дегустация проводилась на несмешанной пище, имитируя самое начало процесса жевания. Затем образец перемешивали в течение нескольких секунд. Это измерение использовалось только для визуализации. Еще через 60 секунд перемешивания на максимальных оборотах проводилась повторная дегустация, имитирующая последние этапы жевания.
Кроме того, данные обрабатывались для создания нескольких экземпляров для каждого из классов, соответствующих одному из типов блюда (коих всего девять). Экземпляры классов представляют собой подмножества образцов, собранных при дегустации блюда определенного класса. Экземпляр или подмножество представляет реальную дегустацию, которая проводится с меньшим количеством образцов. Эта процедура позволяет использовать данные, собранные из одной тарелки для каждого из классов. Поэтому было изготовлено 40 экземпляров каждого класса, каждый из которых содержал случайно выбранные 40% образцов, собранных при дегустации. Каждый из полученных экземпляров содержит 129 образцов, собранных до жевания, и столько же образцов, собранных после жевания. Полученные экземпляры затем разбиваются на наборы данных для обучения и тестирования в соотношении 4:1. Затем каждый экземпляр сводится к набору из 4 чисел — среднего и дисперсии, как до, так и после жевания. Все это является вводными данными для SVM (от support vector machine) классификаторов.
Далее было протестировано несколько методов классификации (изображение ниже).

Изображение №5
Методы отличаются только типом данных, доступных классификатору, но это вносит существенное изменение. С точки зрения классификатора, оно приносит дополнительные данные о каждом классе, и эти данные добавляют дополнительные измерения в пространство, где SVM находит границу между классами. Каждая из конфигураций представляет собой отдельный метод дегустации, даже если все данные собираются в одном эксперименте.
Первая конфигурация воссоздает современный метод дегустации однородного образца. Это делается путем вычисления среднего значения показаний для смешанного образца, что является приближением идеально гомогенизированного образца. Вторая и третья конфигурации используют обе вкусовые метрики, используя преимущество пространственного распределения вкуса, как для смешанных, так и для несмешанных блюд. Это является имитацией дегустации только в один момент процесса жевания. Последняя конфигурация использует обе метрики, рассчитанные как до, так и после смешивания. Именно этот вариант конфигурации и является наиболее близким к реальной дегустации человеком, а также реализует подход, показанный на изображении №1.
Результаты экспериментов
Изображение №6
Сначала ученые построили карты вкуса для отдельных образцов (изображение выше). В несмешанном образце были отчетливо видны участки с пониженной электропроводности и четкими границами между этими областями и яичницей. «Полусмешанный» образец показал меньше таких областей, а те, что все еще присутствуют, менее четко определены. Более того, сама «область» яичницы-болтуньи стала менее проводящей, возможно, из-за подмешивания томатного сока в эту область. Наконец, последний образец показал довольно однородное распределение проводимости. Из этого следует, что каждая стадия жевания предоставляет новый набор вкусовых карт, что дает дополнительную информацию для классификации и анализа.
Изображение №7
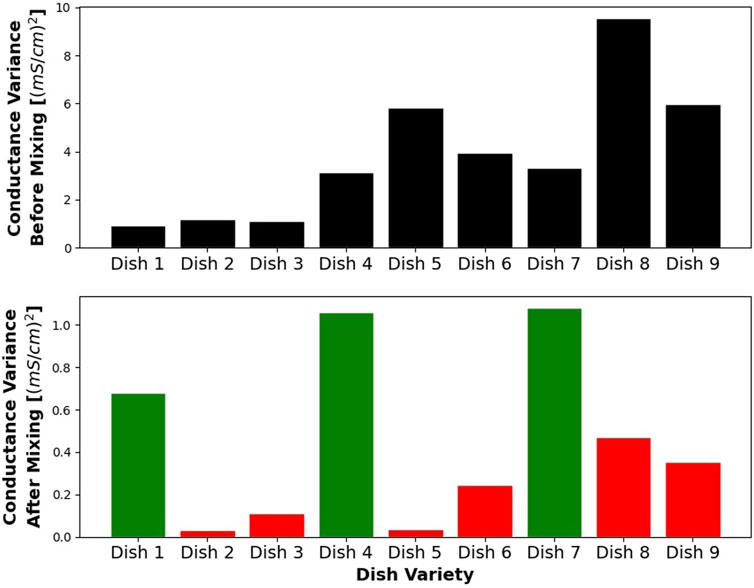
График выше показывает отклонения измерений проводимости для каждого из блюд. Их анализ показал, что добавление помидора значительно снижает дисперсию после пережевывания. Многомерная линейная регрессия показала, что добавление помидоров (любого ненулевого количества) снижает дисперсию после жевания на 0.73 мСм/см и является статистически значимым с p-значением 0.000019. Количество соли, еще одна переменная в этой модели, имело гораздо меньший размер эффекта: 0.1 мСм/см и p-значение 0.013. Это показывает, что добавление помидора действительно является доминирующим фактором, уменьшающим дисперсию измерений.
В ходе опытов наблюдался еще один эффект — повышение проводимости в процессе жевания. Однако он был только в случаях, когда томаты были частью дисперсии блюда.
Изображение №8
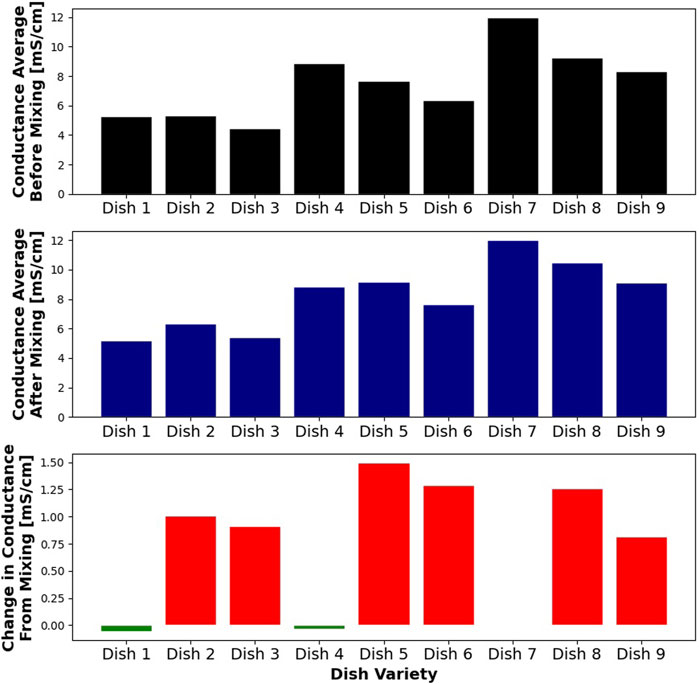
На графике выше показана разница между дисперсией после пережевывания и дисперсией до пережевывания для разных видов блюд. Сопоставление данных с многомерной линейной моделью показало, что добавление помидоров увеличивает это значение на 1.15 мСм/см. А вот изменение количества соли не имело какого-либо статистически значимого эффекта.
Изображение №9
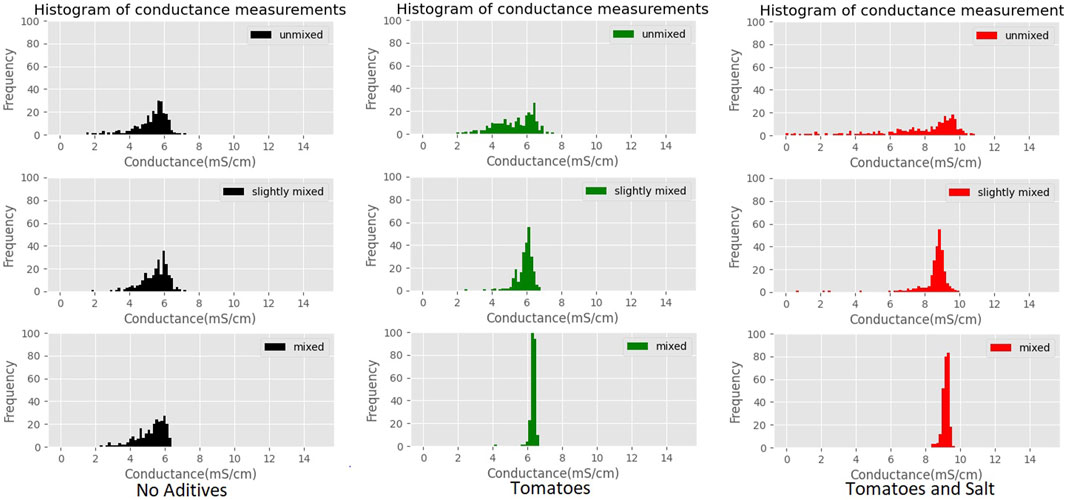
Выше представлены гистограммы, показывающие влияние добавления дополнительных ингредиентов. Блюдо без каких-либо дополнительных ингредиентов существенно не меняется при смешивании. Смешивание начинает иметь гораздо больший эффект, если добавить помидор, сжимая гистограмму на более поздних этапах смешивания. Наконец, добавление соли сдвигает гистограмму к более высоким значениям, существенно не меняя ее форму.
Качество классификации измерялось с помощью меры F1, поскольку она исключает как ложноотрицательные, так и ложноположительные ошибки при оценке классификатора.

Изображение №10
Результаты классификации «один против всех» для каждого из вариантов яичницы-болтуньи показаны на графике выше. Каждая из четырех конфигураций дегустации показана отдельным столбцом.
Анализ графика показывает, что вариативность легче классифицировать, чем другие показатели. Однако добавление дополнительных данных повышает точность классификации в целом. Более четкие тенденции видны при просмотре средних показателей F1 (изображение №11).

Изображение №11
Тут четко видно, что первый метод (дегустация гомогенизированного образца) дает самый низкий результат, в то время как последний метод (дегустация как до, так и после жевания) дает самый высокий.
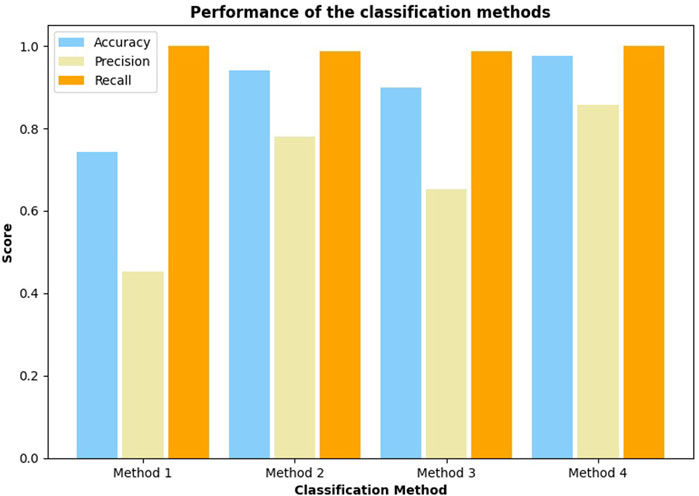
Изображение №12
Далее были оценены точность, прецизионность и полнота каждого из тестируемых методов классификации (график выше). Анализ показал, что точность варьируется от 75% до 90%, а полнота всегда держится на достаточно высоком уровне, что говорит о том, что классификатор почти всегда распознает блюдо тестируемого класса. По мнению ученых, такая тенденция связана с тем, что их метод дегустации добавляет дополнительные функции и помещает блюда в пространство более высокой размерности, что упрощает SVM классификацию.
Для более детального ознакомления с нюансами исследования рекомендую заглянуть в доклад ученых.
Эпилог
В рассмотренном нами сегодня труде ученые смоделировали процесс жевания с помощью роботизированной установки, а затем использовали ее для получения дополнительной информации путем взятия образцов, разделенных в пространстве и во времени. Визуализация полученных данных была выполнена методом картирования, который показал, что на каждом этапе жевания проявляется дополнительная вкусовая информация.
Ранее попытки роботизированной дегустации проводились с использованием гомогенизированных (т. е. однородных) образцов. Однако разработанный учеными метод, имитирующий жевание, дает куда более высокую эффективность классификации блюд.
В будущем ученые намерены исследовать влияние смачивания пищи на оценку ее вкуса, т. е. изучить как слюна влияет на дегустацию. Перевести этот аспект в рамки роботизированной установки будет гораздо сложнее. Возможно, говорят ученые, получится использовать химические реагенты для воссоздания липазы и амилазы, присутствующих в слюне человека.
Кроме того, авторы разработки намерены проверить ее и на других блюдах. В глобальном масштабе есть вопрос, на который ученые хотели бы получить ответ, — будет ли достаточно такой дегустации для оценки вкуса блюда или же стоит использовать измерение его точного химического состава.
Как бы то ни было, подобного рода исследования помогают понять и математически описать процессы, которые протекают в организме человека естественным путем, что, в свою очередь, помогает воссоздавать эти процессы в исполнении роботов. Современные роботы-повара вызывают восхищение и удивление, но они не могут сравниться в своем мастерстве с людьми, которые годами оттачивают навыки не только приготовления изысканных блюд, но и восприятии их вкуса. В робота можно загрузить рецепт какого-либо блюда, и он приготовит его с точностью до миллиграмма. Но, пока он не сможет оценить свое творение на вкус, он не сможет довести его до совершенства и превратиться из очень дорогого кухонного инвентаря в настоящего художника кулинарии.
Немного рекламы
Спасибо, что остаётесь с нами. Вам нравятся наши статьи? Хотите видеть больше интересных материалов? Поддержите нас, оформив заказ или порекомендовав знакомым, облачные VPS для разработчиков от $4.99, уникальный аналог entry-level серверов, который был придуман нами для Вас: Вся правда о VPS (KVM) E5-2697 v3 (6 Cores) 10GB DDR4 480GB SSD 1Gbps от $19 или как правильно делить сервер? (доступны варианты с RAID1 и RAID10, до 24 ядер и до 40GB DDR4).
Dell R730xd в 2 раза дешевле в дата-центре Maincubes Tier IV в Амстердаме? Только у нас 2 х Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 ТВ от $199 в Нидерландах! Dell R420 — 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB — от $99! Читайте о том Как построить инфраструктуру корп. класса c применением серверов Dell R730xd Е5-2650 v4 стоимостью 9000 евро за копейки?
phanerozoi_evidence
Вспомнился бендер из футурамы и его чудесные блюда