
Далее длинное повествование о создании БТР с самого начала
Сделал модель бронетранспортера БТР-80 8х8 в масштабе 1/6.
Основные особенности:
Электрически изменяемый клиренс у каждого колеса
Бортовая трансмиссия с возможностью разворота на месте
Все колеса управляемые
Гиростабилизация
MIDI интерфейс для развлечения
Основные характеристики:
ВхШхД 1180x460x440мм (при максимальном клиренсе), колея 400мм
Клиренс меняется от 0 до 80мм.
Снаряженная масса 21кг
Масса стального корпуса 6кг
Пиковая мощность электромоторов 2kW
Питание два 6000mAh 3s LiPo аккумулятора для электромоторов, два 6000mAh 2s LiPo аккумулятора для сервоприводов.
Максимальная скорость 30км/ч, далее шины сильно раздуваются от центробежной силы и цепляются друг за друга. Теоретический предел шасси около 60км/ч
Рассказ об основных особенностях, для тех кому лениво читать
Трансмиссия
Трансмиссия бортовая — у левого и правого борта свой электромотор.
Это позволяет передавать необходимый момент на колеса в повороте без применения дифференциала, т.е. дифференциал реализуется программным образом в контроллере управления. Такой тип трансмиссии позволяет осуществлять разворот на месте. Не требуются дополнительные блокировки для повышения проходимости.
Колесные редукторы самодельные.




Получилась такая база для шасси
Далее установил два трехфазных сенсорных бесколлекторных электродвигателя


Шасси
Сделал управление клиренсом с помощью сервоприводов
Максимальный клиренс

Минимальный клиренс

Рулевые трапеции продольные, а не поперечные

Вот такой набор деталей из алюминия пришлось сделать самостоятельно

Шасси после сборки


Вот так можно независимо управлять колесами

Ускоренное видео сборки шасси — 18 минут
Корпус
Корпус из оцинкованной жести толщиной 0.4мм.
Сделан пайкой, паял припоем ПОС-61 с кислотным флюсом.


Что-то допиливаю )))

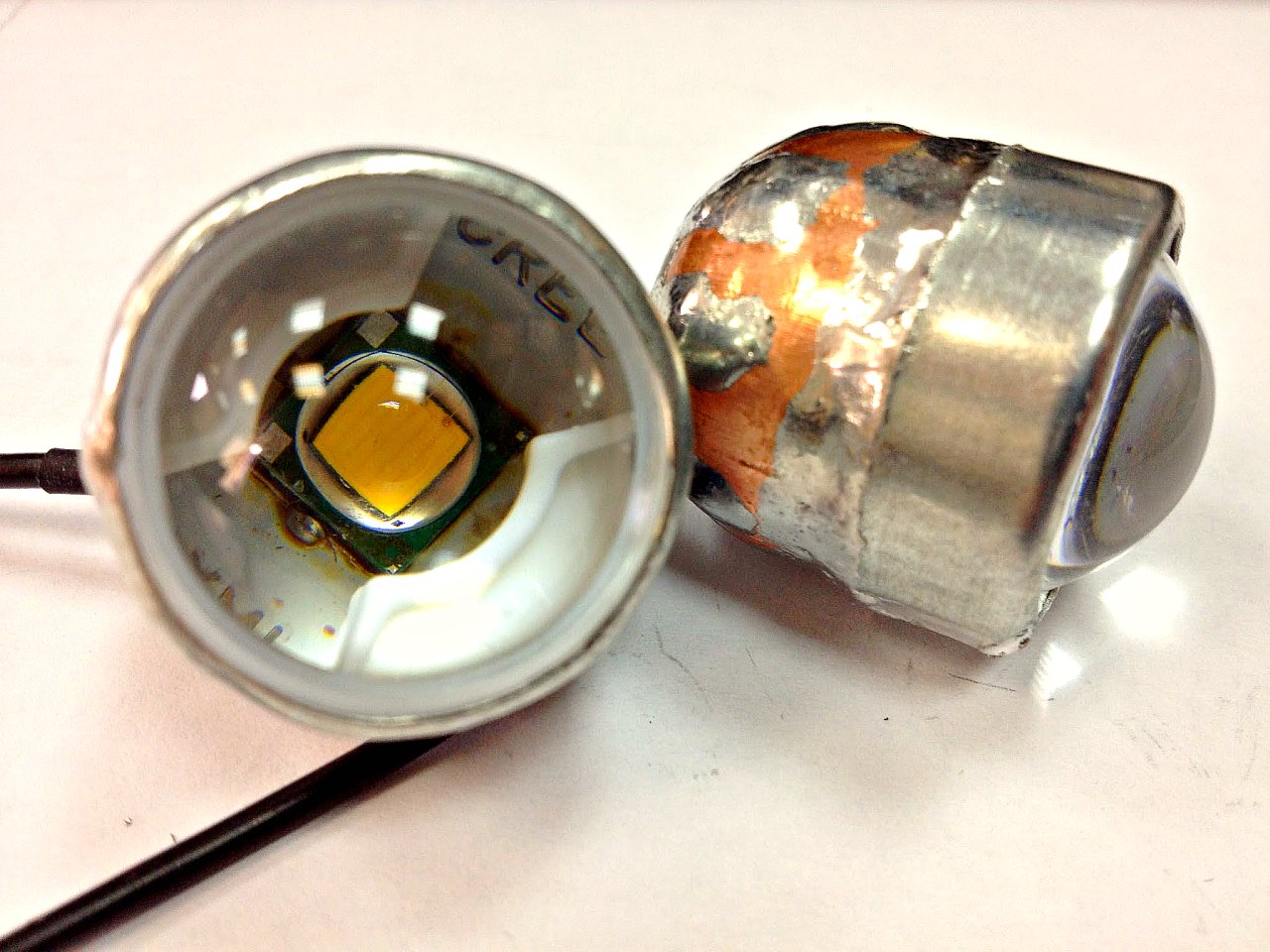
Фары из меди, внутри светодиод CREE XML T6 с драйвером
После покраски



Система управления
За аппаратную основу взят мультикоптерный контроллер Crius All in one pro на базе Arduino Mega 2560.
В контроллере много портов ввода/вывода и готовая трехосная гиро система.
Контроллер находится в центре шасси сверху в герметичном алюминиевом корпусе, вместе с ним восьмиканальный приемник системы радиоуправления.

За программную основу взят код Arduino Multiwii 2.2.
Увеличил количество количество каналов серв до 15, используя софтовый метод генерации ШИМ сигнала для сервоприводов.
Сделал четыре функции в рулевом управлении:
1. Бортовое управление, при нулевой скорости разворот на месте, все колеса повернуты плугом.
2. Бортовое управление, при нулевой скорости разворот на месте, все колеса по центру.
3. Поворот передних колес, дифференциал мотора.
4. Поворот всех колес, задние зависят от скорости, дифференциал мотора.
И четыре функции работы электроподвески:
1. Все сервоприводы подвески отключены.
2. Статический клиренс и горизонт шасси.
3. Прогрессивный наклон шасси в повороте, как у мотоциклистов.
4. Гиростабилизация шасси.
В качестве пульта используется стандартная 8-ми канальная самолетная радиоаппаратура.
Проверка на ходу
Достаточно сухих описаний — пора бы и прокатиться!
Без пушки грустный вид, пришлось для безопасности сделать ее быстросъемной на магните, чтобы не покалечить детей.



БТР-80 барабанщик
Решил пошалить — скрестить ужа с удавом.
Помимо RC моделирования увлекаюсь музыкой — а пускай БТР будет играть своей шибко навороченой подвеской на барабанной установке.
Сделал MIDI адаптер и написал подпрограмму преобразования нот в перемещение сервоприводов подвески.

Вся схема поместилась в разъем

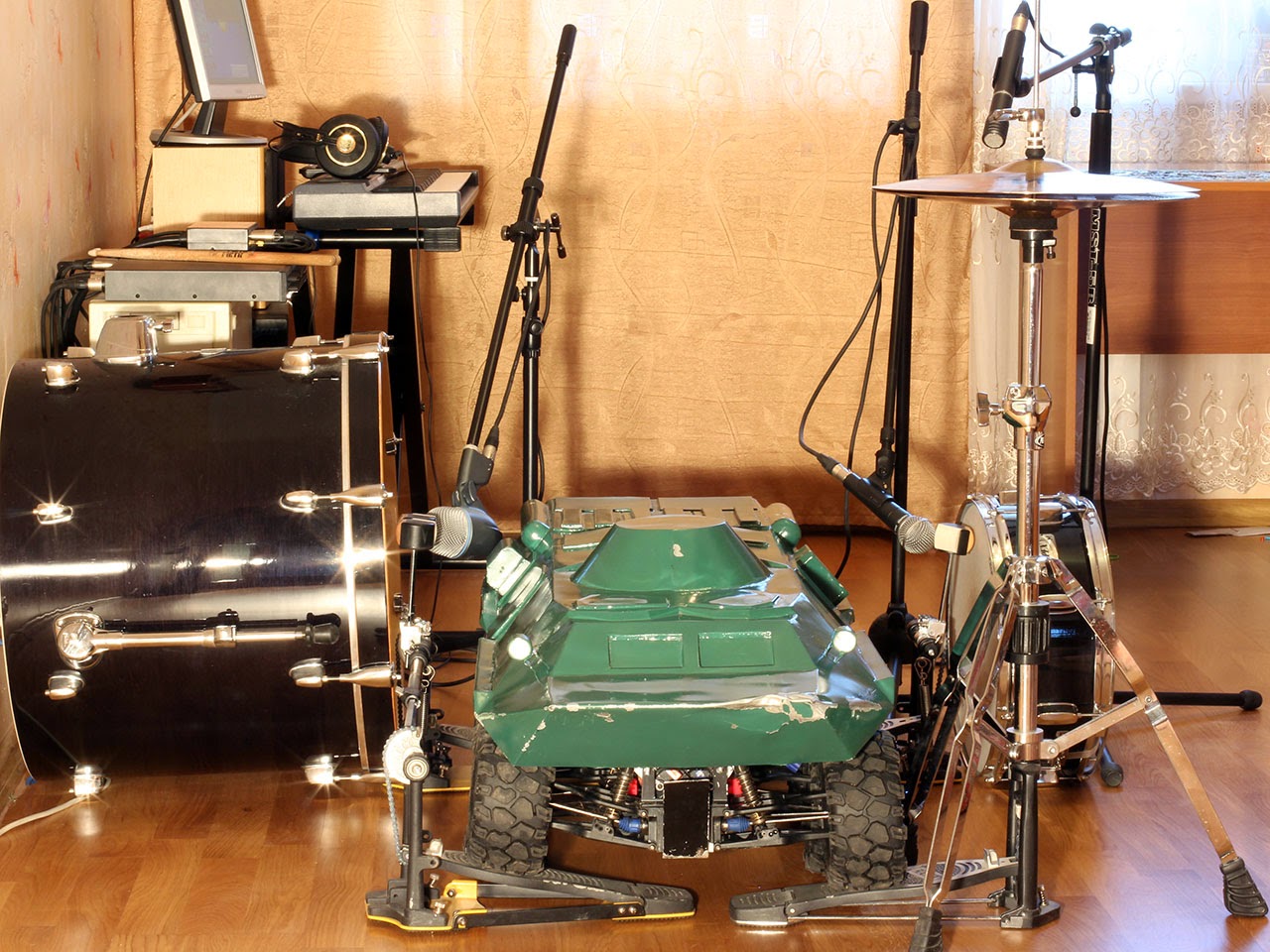

Колесо ставится на педаль барабана, которая осуществляет удар по барабану.
Каждое колесо будет ударять по своему барабану в соответствии с записанной нотной партией. Ноты передаются от компьютера или синтезатора посредством стандартного музыкального MIDI интерфейса.
Для игры использованы четыре колеса: два колеса для двойной кардан педали бас бочки, одно колесо для педали ведущего барабана и одно для педали тарелки хай-хэт. Пятое колесо нажимает педаль квакушку для гитары.

Вот что получилось
Опять же для ленивых читателей видео
На этом все! БТР разобран для создания нового проекта, но об этом в другой раз…
P.S. Музыканты начнут сомневаться в правдивости видео.
Да, это полуфейк.
К сожалению, идею не всегда с легкостью можно реализовать на практике, у меня получилось наполовину.
По сути, это мое шуточное видео завершающее работы с БТР.
БТР конечно барабанит, но не так как необходимо для нормальной звукозаписи.
Барабанный трек все-таки пришлось записывать с синтезатора, основные причины:
1. Мала масса модели и начинаются паразитные резонансы, т.к. стоят пружины в подвеске и в барабанных педалях, получается каша.
Обратите внимание в видео, где БТР без корпуса стал еще легче — колотушки почти не ударяют в барабаны.
2. Слабые сервоприводы, которые быстро перегреваются, либо срываются шестерни.
Комментарии (19)

artty
16.05.2015 21:53+4Какой примерный бюджет сего творения? Не думаете продавать?

krohpit Автор
17.05.2015 01:10Точно не подсчитывал — думаю покупные элементы около 2к$.
Это мое хобби — не для продажи.
Что-то я сомневаюсь, что есть желающие такое покупать ))
Шасси изначально сделал модульным, поэтому сборка новой модели (Тополь-М) идет с наименьшими затратами.

xforce
16.05.2015 22:25+5Очень круто.
Один вопрос, на шасси видны вентиляторы. Каким образом получилось при этом сделать его водонепроницаемым? Или вентиляторы оказались не нужны в итоге?krohpit Автор
17.05.2015 01:15Монтаж был очень плотным, поэтому поставил вентиляторы, но использовать не пришлось, т.к. ездил не на пределе возможностей.
Все остальное герметичное.
На другой машине у меня было расплавление обмоток мотора от перегрева при экстремальной езде.

esc
17.05.2015 09:53+2А не пробовали такие модели в гоночном режиме? Интересно, улучшится ли прохождение поворотов, если вместе с поворотом колес еще и клиренс на внутренней стороне опускать, а на внешней поднимать.
krohpit Автор
17.05.2015 13:09Такой функционал у меня заложен, но практическое преимущество так и не выяснял.
В силу семейных обстоятельств, у меня практически нет времени на хобби. Я показал любителям RC, то что еще не использовалось в моделях машин, может это создаст новое направление в моделизме. Конструировать могу поздними вечерами, а покатушки очень редко с детьми.


nehyrb
17.05.2015 12:15+1Великая постройка!
Вы не читали про вездеходы Грачева? Конструктивным решением сделать привод колес по бортам, Вы повторили его основную идею. Почитайте, в частности, про а/м «Синяя птица», который использовался для эвакуации космонавтов.krohpit Автор
17.05.2015 13:14Очень давно в детстве слышал про бортовую трансмиссию на колесной технике, вот и отложилось.
Когда сделал свою модель, узнал и про «Синюю птицу» )) Интересный вездеход, там еще в спасательном комплексе «шнекоход» есть.
Только сейчас эта техника не применяется, т.к. балистики научились достаточно точно приземлять спускаемые аппараты.
А еще есть небольшие амфибии на колесах с бортовой трансмиссией (6х6, 8х8), но у них колеса не поворачиваются.

BubaVV
17.05.2015 12:44Не могу отделаться от впечатления, что корпус сплющен по вертикали и вообще мельче по масштабу, чем колеса. И были ли реальные машины с таким управлением колесами?
krohpit Автор
17.05.2015 13:23Корпус действительно приплющен, но масштаб соответствует колесам.
Колеса шире.
Просто когда делал шасси я не планировал делать БТР, Это получилось много позже.
Рама моего шасси выше чем надо для БТР, поэтому у кузова сильно подрезан низ.
С бортовым управлением существуют, а вот со всеми отдельно рулевыми не встречал.
Кстати БТР-90 с может на месте разворачиваться, видимо у него то же бортовая трансмиссия.

mm_aa
17.05.2015 20:48Очень впечатлят. Расскажите, если не сложно, про ваш процесс механического дизайна. В чем, как? Много ли приходилось переделывать? Интересно же!
mm_aa
17.05.2015 20:53+1Кстати, как барабанщик, я сразу понял что это не он играет :) Шутку оценил.
krohpit Автор
18.05.2015 00:06У меня небольшой опыт работы в CAD приложениях, но даже не это основной фактор, а то что я много работаю с компьютерами — машины придумываю карандашом на бумаге ))
У меня есть и готовые RC машины, основываясь на готовых решениях и своих идеях делаю наброски основных узлов, далее оптимизирую с точки зрения ремонтопригодности, удобства монтажа, модульности(для последующих разработок) и технологии производства.
Когда все придумано черчу карандашом на миллиметровой бумаге. Вот такой архаизм.
Конечно в CAD приложениях можно все хорошо спроектировать и проще скомпоновать сложные агрегаты, но у меня ушел бы год только на проектирование. Я же не занимаюсь коммерческим производством.
По максимуму стараюсь использовать готовые детали, не изобретая велосипедов. Например детали подвески, шестерни, коробки скоростей.
Очень важна технологичность — у меня к сожалению пока нет своего фрезерного и токарного станка, приходится заказывать на производстве у знакомых, поэтому никаких лишних усложнений в обработке.
Насчет переделок — это первая моя полностью самодельная машина и мне по большей части все понравилось. Были и аварии и поломки, но мне не приходилось для ремонта разбирать пол машины. Например разбившийся подшипник в одном из средних мостов заменил не снимая редуктор (что потребовало бы разбора пол машины), на обычной RC машине такого сделать не получится.
Во второй машине (Тополь-М) еще оптимизировал трансмиссию, там вместо карданчиков муфты от CNC станков — теперь можно всю трансмиссию перебрать/починить/заменить не разбирая машину.
Про Тополь-М сюда писать статью вряд ли буду, RC модели не очень вписываются в тематику geektimes. Разве что про его силовую установку. Он гибридный.
Я так то тоже на барабанах играю, но для этой композиции мне друг написал забористый MIDI трек, а вот гитары и клавиши сам записывал.
Очень много пришлось всего осваивать за 2,5 года работы с БТР:
Проектирование механической части, изготовление различных алюминиевых деталей, пайка корпуса из жести, покраска, программирование микроконтроллера, видеосъемка, звукозапись.
Все это не сильно профессионально вышло, главное, что мои машины нравятся моим детям.
bockra
Коммент про троллейбус и буханку хлеба