
" Вдохновение, которое искал все утро,
настигло в самый неудачный момент.
И как объяснить что я ухожу на SCRUM?
— Пойдем со мной ?! "
 Коммуникация в команде— суровая необходимость больших проектов. Это не должно выглядеть как эшафот или принудительное собрание анонимных алкоголиков. От команды нужно участие, нужен блеск в глазах, каждого должно рвать от желания высказаться, как от пафосности этого предложения. Постепенно наша команда эволюционировала до SCRUM-модели, во многом благодаря простым и наглядным наклейкам. Какой же SCRUM без наклеек? Почти у каждого в детстве были наклейки и, где-то глубоко в подсознании засели воспоминания, когда нас, еще будучи ребенком, учила клеить воспитательница и, если наклейка была приклеена ровно, в качестве поощрения, она не била по рукам. Но даже в нашем беззаботном детстве приходилось делать вещи, которые казались нам скучны и непонятны — убирать игрушки, оттирать стену от ручки или писать под диктовку. Повзрослев, у нас появляется выбор — мы можем переложить работу на других. А кто захочет за всех писать backlog (отчет) и потом переносить данные в Jira? Использование Jira непосредственно в процессе митинга выводит участника из обсуждения, поэтому, после принятие конвенции ООН об упразднении рабства, остается переложить эту задачу на роботов.
Коммуникация в команде— суровая необходимость больших проектов. Это не должно выглядеть как эшафот или принудительное собрание анонимных алкоголиков. От команды нужно участие, нужен блеск в глазах, каждого должно рвать от желания высказаться, как от пафосности этого предложения. Постепенно наша команда эволюционировала до SCRUM-модели, во многом благодаря простым и наглядным наклейкам. Какой же SCRUM без наклеек? Почти у каждого в детстве были наклейки и, где-то глубоко в подсознании засели воспоминания, когда нас, еще будучи ребенком, учила клеить воспитательница и, если наклейка была приклеена ровно, в качестве поощрения, она не била по рукам. Но даже в нашем беззаботном детстве приходилось делать вещи, которые казались нам скучны и непонятны — убирать игрушки, оттирать стену от ручки или писать под диктовку. Повзрослев, у нас появляется выбор — мы можем переложить работу на других. А кто захочет за всех писать backlog (отчет) и потом переносить данные в Jira? Использование Jira непосредственно в процессе митинга выводит участника из обсуждения, поэтому, после принятие конвенции ООН об упразднении рабства, остается переложить эту задачу на роботов.В результате родилась идея написать программу распознавания и отслеживания карточек задач на SCRUM-доске.
Постановка минимальной задачи видится так:
- прочесть изображение SCRUM-доски;
- выделить стикеры;
- сохранить изображения стикеров;
- определить зону доски, где находятся стикеры;
- определить, к какой задаче относится стикер;
- сформировать файл с информацией о статусе задач.
Собственно, задача выглядит достаточно элегантной и простой одновременно, и мы предлагали ее в этом году в качестве учебного задания во время нашей летней школы по программированию. В данной статье предлагается рассмотреть реализацию первых трех требований.
С оцифровкой изображения доски правило простое — последний вставший со стула фотографирует доску. В будущем его должен заменить робот.
Ниже фотография того, как может выглядеть упрощенная SCRUM-доска. Очень упрощенная.
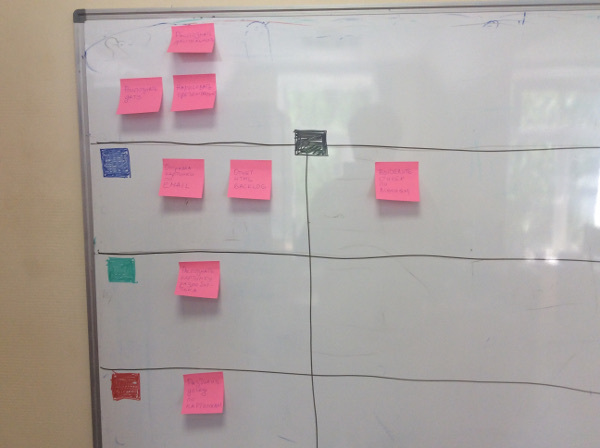
Рис.1. Пример SCRUM-доски.
Сверху стикеры для невыбранных задач, ниже области задач разработчиков (синего, зеленого и красного). Область каждого разработчика разбита на две части — слева находятся задачи, которые выполняются, справа — выполненные.
Сегментация
Начнем с банальностей — загрузка исходного изображения с фотографией доски делается средствами OpenCV очень просто:
int main(int argc, char** argv) {
vector<cv::Mat> stickers;
cv::CommandLineParser parser( argc, argv, keys );
String image_path = parser.get<String>( 0 );
if( image_path.empty() ) {
help();
return -1;
}
cv::Mat image = cv::imread(image_path);Для представления изображений в OpenCV используется класс cv::Mat. Это интересная структура данных и подробную информацию про этот класс можно найти туточки.
Далее необходима основная функция для выделения изображений стикеров:
recognizeStickers(stickers);В первой версии мы просто сохраним найденные стикеры в файлы с именами sticker1.jpg … stickerN.jpg:
saveStickers(stickers);
}Рассмотрим более подробно функцию выделения изображений стикеров. Прототип функции может быть таким:
void recognizeStickers(vector<cv::Mat> &stickers);Алгоритм решения задачи выделения контрастных объектов на однородном фоне может быть реализован различными способами:
- Алгоритм 1. Выделение объектов (стикеров), имеющих заданный цвет при помощи функции inRange;
- Алгоритм 2. Выделение ярких объектов (стикеров) из S-канала HSV-изображения при помощи функции threshold;
Алгоритм 1
Выделение стикеров при помощи inRange может быть следующим:
- определить диапазон цветов, характерных для стикера (в первой реализации зададим диапазон явно, константами) ;
- выделить точки, цвет которых отличается от цвета фона, при помощи ступенчатого преобразования;
- при помощи фильтра объединить точки предполагаемого стикера для получения сплошного изображения;
- выделить границы непрерывных областей;
- определить границы по вертикали и горизонтали для групп точек предполагаемых стикеров.
Ниже грубый набросок, иллюстрирующий идею алгоритма:
void recognizeStickersByRange(cv::Mat image,std::vector<cv::Mat> &stickers)
{
cv::Mat imageHsv;
std::vector< std::vector<cv::Point> > contours;
// Преобразуем в hsv, чтобы точнее вылавливать цвет стикера
cv::cvtColor(image, imageHsv, cv::COLOR_BGR2HSV);
cv::Mat tmp_img(image.size(),CV_8U);
// Выделение подходящих по цвету областей
cv::inRange(imageHsv,
cv::Scalar(key_light-delta_light,key_sat-delta_sat,key_hue-delta_hue),
cv::Scalar(key_light+delta_light,key_sat+delta_sat,key_hue+delta_hue),
tmp_img);
// "Замазать" огрехи при выделении по цвету
cv::dilate(tmp_img,tmp_img,cv::Mat(),cv::Point(-1,-1),3);
cv::erode(tmp_img,tmp_img,cv::Mat(),cv::Point(-1,-1),1);
// Выделение непрерывных областей
cv::findContours(tmp_img,contours,
CV_RETR_EXTERNAL, CV_CHAIN_APPROX_NONE);
for (uint i = 0; i<contours.size(); i++)
{
cv::Mat sticker;
//Для каждой области определяем ограничивающий прямоугольник
cv::Rect rect=cv::boundingRect(contours[i]);
image(rect).copyTo(sticker);
//Добавить к массиву распознанных стикеров
stickers.push_back(sticker);
}
} После ступенчатого преобразования и растягивания области с использованием фильтра для объединения областей, разделенных шумом (метод cv::dilate), получим:
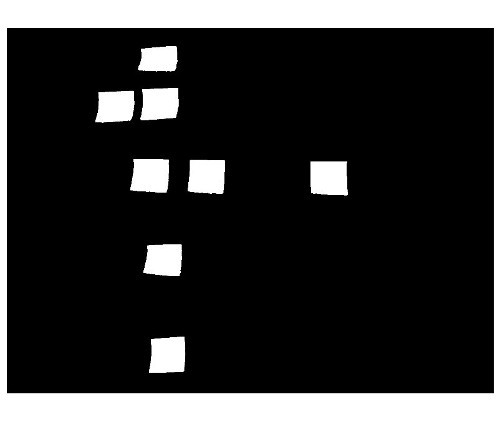
Рис.2. Изображение после бинаризации.
Отправим бинаризованное изображение на вход алгоритма выделения контуров сv::findConturs и для каждого контура найдем ограничивающий прямоугольник при помощи cv::boundingRect. Для наглядности нарисуем ограничивающие прямоугольники зеленым цветом на исходном изображении.
В результате выделения областей получаем успешно выделенные стикеры. Ниже результат работы алгоритма на тестовом изображении.
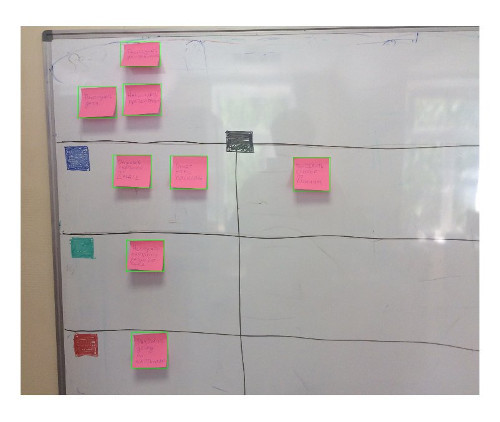
Рис.3. Стикеры выделены.
Зная параметры ограничивающих прямоугольников, легко вырезать и сохранить изображения стикеров на диск в виде отдельных файлов:
for (uint i = 0;i < stickers.size();i++) {
cv::imwrite("sticker"+toString(i+1)+".jpg",stickers[i]);
}В результате, на диске будет сформированы файлы sticker1.jpg … stickerN.jpg. Пример содержимого файла-стикера приведен ниже:
Рис.4. Изображение выделенного стикера.
Необходимо отметить, что в вышеприведенном примере мы не реализовали алгоритма определения цвета стикера, а задали его константами key_light, key_sat, key_hue в HSV-пространстве, что в нормальных условиях нехорошо. И если вдруг стикеры будут другого цвета, алгоритм надо будет перенастраивать. Граничные прямоугольники для областей разработчиков (синий, зеленый, красный) не выделены. Принципиально возможно задать константами цвета, а для них уже выделить аналогичным алгоритмом, что позволит автоматически определять границы областей и определять статус задач.
Алгоритм 2.
Воспользуемся функцией cv::threshold, как показано в примерах /1/ и /3/. Для начала мы перевели входной кадр в HSV-формат с помощью функции cv::cvtColor, а результат разбили с помощью cv::split. Результат ниже:
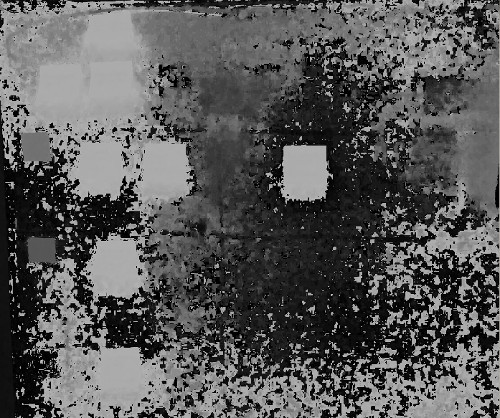
Рис.5. H-канал изображения.
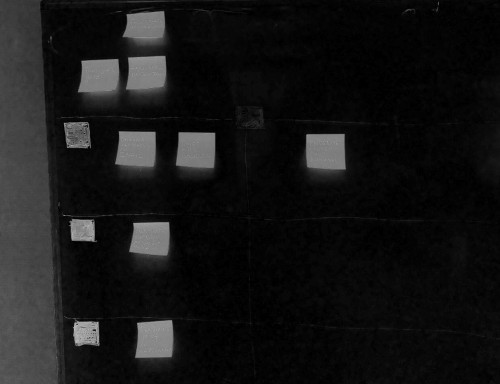
Рис.6. S-канал изображения.
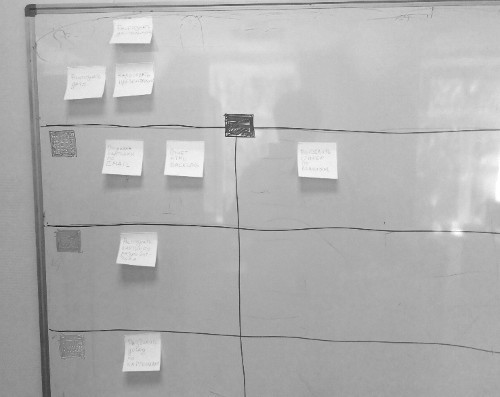
Рис.7. V-канал изображения.
Как видно из рис.5 — рис.7, наибольший интерес для обработки стикеров на белом фоне представляет S-канал изображения, где значение насыщенных цветом стикеров будет максимальным, а белого фона — минимальным. Наиболее наглядно это показано здесь. Можно предположить, что используя функцию cv::threshold с правильным значением границы, мы получим желаемое бинарное изображение с выделенными стикерами, из которого стикеры могут быть выделены при помощи функции cv::findContours, аналогично алгоритму 1.
std::vector<cv::Mat> hsvPlanes;
cv::split(inputHsvImage, hsvPlanes);
cv::Mat image = hsvPlanes[1];
double thresh = 110;
double maxValue = 255;
threshold(image,image, thresh, maxValue, cv::THRESH_BINARY);В приведенном примере значение границы в 110 приводит к желаемому результату бинаризации. Как и в случае с алгоритмом 1, мы опять сталкиваемся с необходимостью подбирать значение границы, которое можно вычислить путем анализа гистограммы изображения.
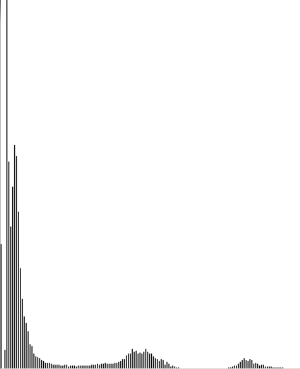
Рис.8. Гистограмма для S канала изображения.
Так как стикеры светлые, то цветам стикера соответствует самый правый пик на гистограмме S-канала. Определив его границы при помощи алгоритма /4/, мы получим искомое значение границы для ступенчатого преобразования.
int findMostRightExtremum(cv::Mat histNorm)
{
vector< float > data;
for (int i=0; i<histNorm.rows; i++)
data.push_back(histNorm.at<float>(i));
// Поиск экстремумов функции.
Persistence1D p;
p.RunPersistence(data);
// Получить все экстремумы больше 0,002.
vector< TPairedExtrema > Extrema;
p.GetPairedExtrema(Extrema, 0,002);
sort(Extrema.begin(),Extrema.end(),
[](const TPairedExtrema &a, const TPairedExtrema &b) -> bool
{
return (a.MaxIndex) > (b.MaxIndex);
}
);
// Используем левую границу самого правого экстремума на графике
return (Extrema[0].MinIndex)*(255/histNorm.rows);
}
В результате бинаризации при помощи функции cv::threshold получим:
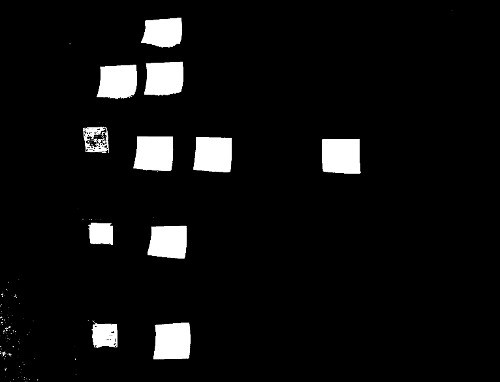
Рис.9. Бинаризация при помощи cv::threshold для рассчитанной границы.
Как можно увидеть, выделены и стикеры, и цветные граничные маркеры, определяющие границы областей разработчиков, что позволит выделить зоны доски для каждого из разработчиков.
Это первая статья из цикла статей о внедрении технологии компьютерного зрения в SCRUM-процесс. Остались вне рассмотрения следующие задачи:
- выделение зон доски («зона невыбранных задач», области «в процессе » и «выполнено» для разработчиков");
- определения зоны доски, в которой находится стикер;
- сопоставление стикеров после перемещения на доске;
- распознавание текста задачи;
- взаимодействие с jira.
Кстати, скоро у нас намечается серия бесплатных вебинаров, посвященных программированию на C++11/14, с примерами из области обработки изображений и дополненной реальности.
Источники
Поделиться с друзьями
azrael
Спасибо за статью, но она производит впечатление небольшого извращения :)
Во-первых, за рамками остались самые сложные, на мой взгляд, вопросы — как вы все-таки будете распознавать тексты с фоток такого качества, как на рис. 4?
Во-вторых,
… поэтому может стоит исключить из процесса что-то одно, доску или Jira? Или может не надо одного человека заставлять за всех переносить, а, например, предложить людям самим внести свои задачи в багтрекер?
OvO
Хочется иметь и jira и естественное общение. Попробуем и в следующей статье напишем, что получается, а относительно распознавания есть следующее варианты:
madkite
А у нас JIRA c плагином для канбан доски, которую на стендапе мы выводим на стену через проектор. Вроде бы никого это не выводит из обсуждения и естественного общения. Но, конечно, это намного скучнее, чем заниматься таким вот.