
В субботу команда Корейского ведущего научно-технического института (KAIST) из Южной Кореи стала победителем в DARPA Robotics Challenge (DRC) в городе Помона (Калифорния), когда их робот, адаптируемый гуманоид DRC-HUBO, победил 22 других роботов из пяти разных стран и выиграл главный денежный приз размером $2 миллиона.

Возможность трансформироваться из двуногого шагающего робота в машину на колесах сыграла важную роль в получении награды. Многие роботы потеряли баланс и упали на землю, открывая дверь или работая дрелью. Но не DRC-HUBO. Уникальный дизайн позволил ему выполнять задания быстрее и, что еще более важно, оставаться на ногах (и колесах).
Передвижение на двух ногах [для роботов] еще недостаточно стабильно, – сообщил Жун Хо О, профессор механической инженерии в Корейском ведущем научно-техническом институте, руководитель команды KAIST. – Если что-то одно сработает неправильно – результат может быть катастрофическим.

Он сказал, что робот-гуманоид имеет преимущества при работе в обществе людей, но он хотел разработать дизайн, который минимизировал бы риск падений: “Я думал о многих вещах, и самое простое было – колеса на коленях”.
DRC-HUBO может менять осанку, стоя на двух ногах, ходить, дотягиваться до предметов, которые находятся высоко, а также перемещаться в более устойчивом положении, на коленях.
DARPA решили организовать DRC после инцидента на Фукусиме в Японии, надеясь продвинуться в сфере робототехники. На соревнование DRC Finals были приглашены команды, разрабатывающие полуавтономных роботов, а люди-операторы должны были работать совместно над моделированием условий катастрофы. Роботы, созданные университетами и компаниями для соревнования сильно отличались по размеру и форме, среди них есть роботы с ногами, колесами, а также гибриды.
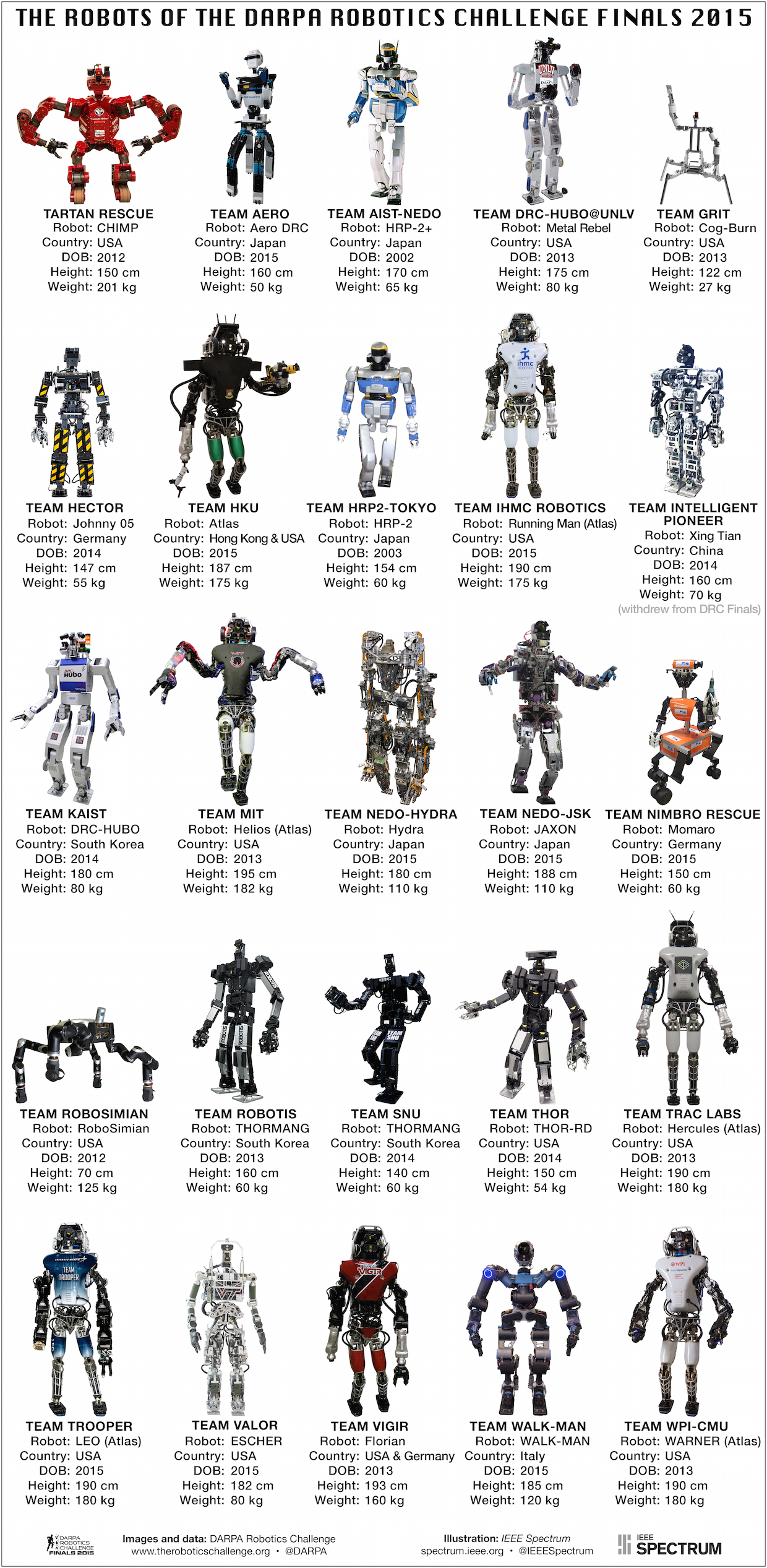
DRC-HUBO стал победителем, потому что смог выполнить все восемь заданий без ошибок за самое короткое время (44 мин. 28 с). Другие команды также хорошо показали себя, но из-за задержек их роботы потеряли время. Среди лучших – команда Tartan Rescue, ее CHIMP – робот с ногами и гусеничными лентами, который смог вернуться к заданиям после падения; Momaro от команды Боннского университета – простая и элегантная машина на колесах, с вращающейся головой и двумя руками; RoboSimian от Лаборатории реактивного движения НАСА, с четырьмя ногами и движениями, напоминающимим йогу; ATLAS от команды IHMC – большой электрический робот-гуманоид, разработанный компанией Boston Dynamics.
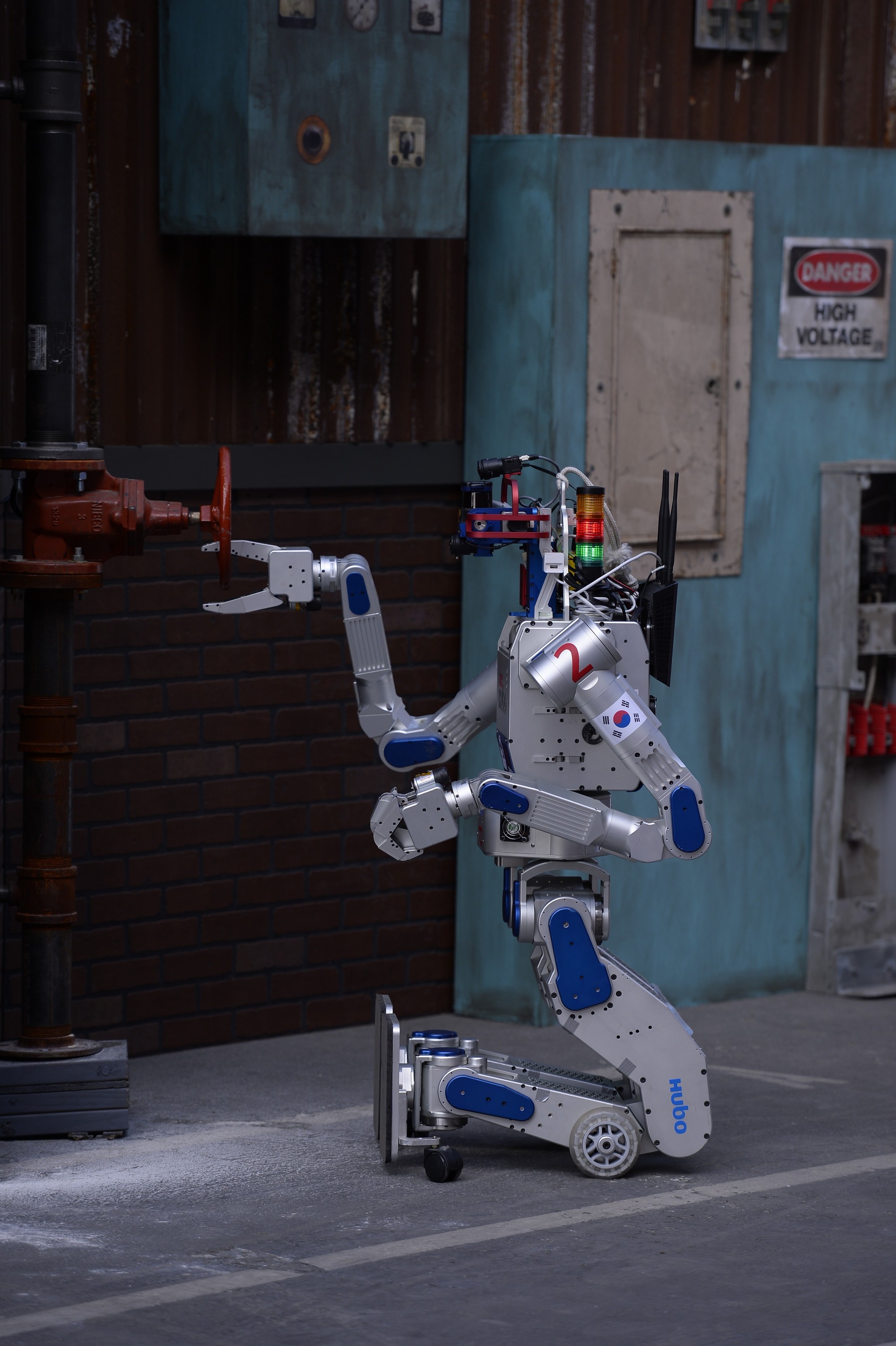
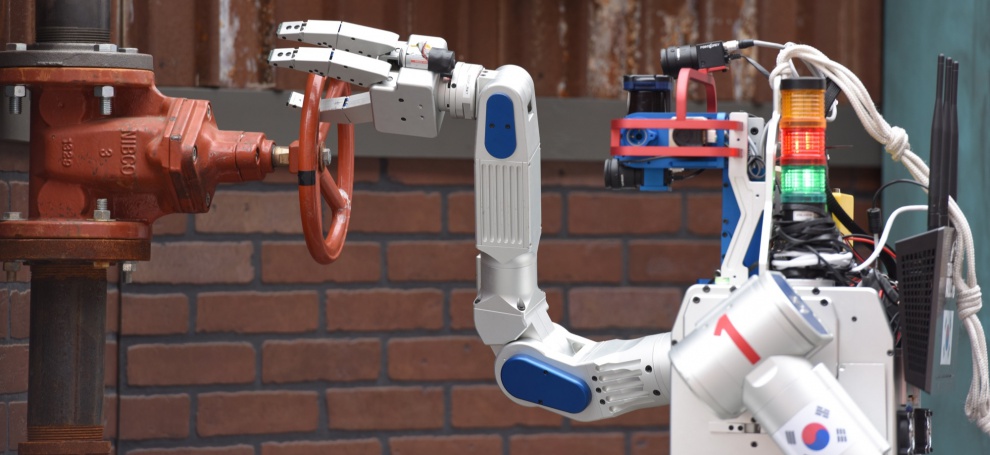
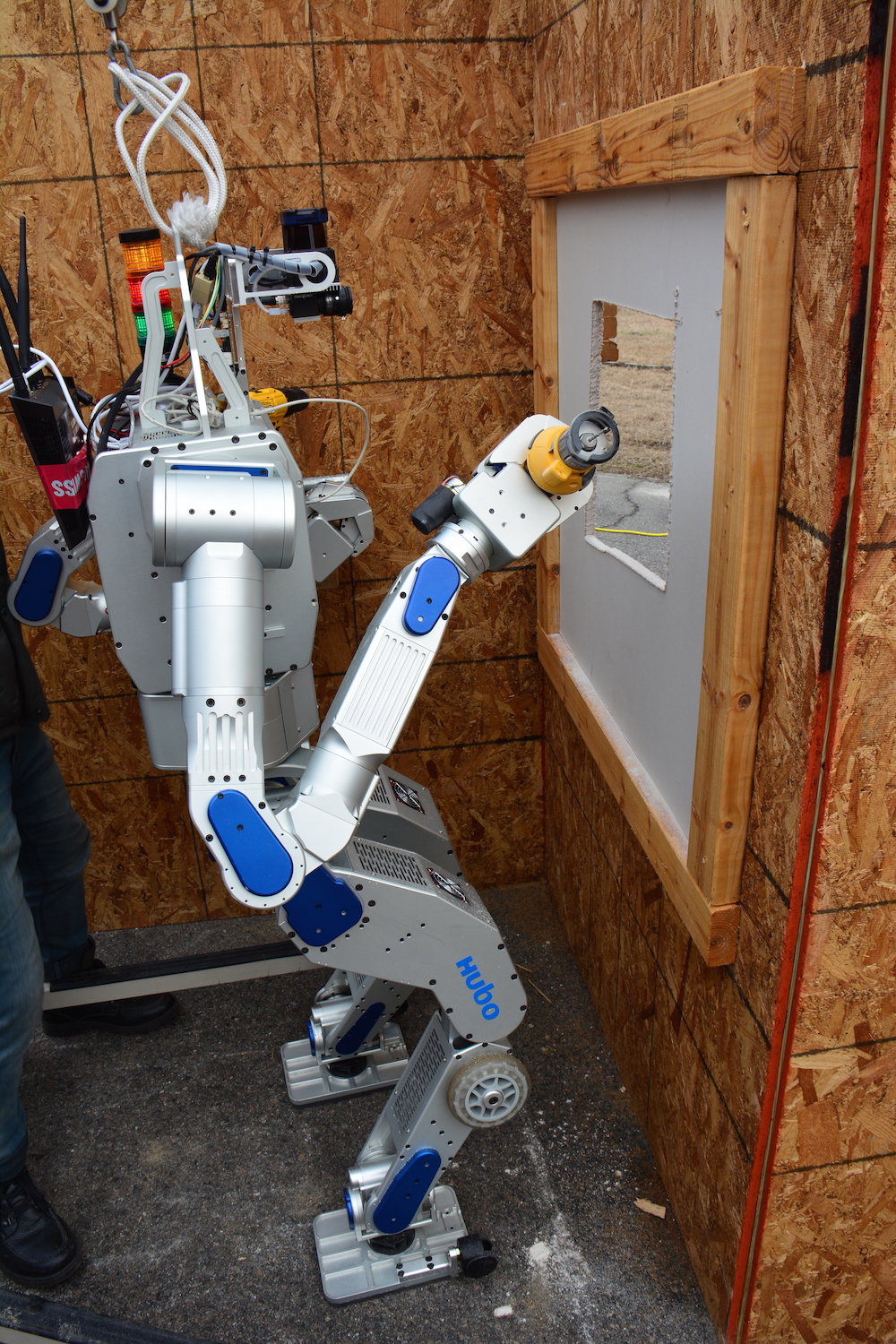
DRC-HUBO выполняет задание по закрытию клапана. Обратите внимание, что верхняя часть его тела повернута на 180 градусов.
Гибкость – это самое важное, – сказал менеджер DARPA и организатор DRC Джил Пратт на встрече с журналистами, комментируя дизайн роботов. – Робот, который способен менять конфигурацию от использования ног к использованию колес, может иметь более сложную конструкцию и больший вес, но он даст вам эту гибкость.
Профессор O является международно признанным экспертом по роботам-гуманоидам. Он и его студенты из KAIST в Тэджоне (Южная Корея) улучшали свою платформу HUBO на протяжении нескольких поколений. Ниже представлено видео, которому уже несколько лет: тогда профессор О продемонстрировал HUBO 2:
Для DRC Finals он решил значительно модифицировать робота, чтобы подготовить его к возможным заданиям. На мастер-классе после соревнования профессор О сказал, что DRC-HUBO “ничем особенным не отличается, это просто робот-гуманоид”. Но на самом деле его команда из KAIST тщательно проработала каждую деталь. Он оценил стоимость каждого робота примерно в $500000 и $1 млн. Ниже представлены основные особенности, которые помогли DRC-HUBO справиться с заданиями:
1. Колеса на коленях: DRC-HUBO имеет колеса на обоих коленях и ролики на ногах. Колеса позволяют роботу двигаться быстро и устойчиво. Передвигаясь по земле, он использует оптические сенсоры на голенях для измерения расстояния с помощью оптического потока.

2. Мощные двигатели: так же, как SCHAFT — робот, победивший в предварительном соревновании DARPA и приобретенный компанией Google, DRC-HUBO имеет очень мощные двигатели (у него их 33, с 31 градусом свободного движения). Благодаря специализированным двигателям и системе охлаждения воздуха (вентиляторы и лопасти) робот может пользоваться напряжением в 3-4 раза больше, чем указано в спецификации двигателя, с максимальным показателем в 30 ампер в некоторых случаях.
3. Совместимость: команда хотела сделать робота совместимым без использования силомоментных датчиков и обычного автоматического регулятора (боялись, что это приведет к нестабильности). Поэтому с помощью специального усилителя задачу совместимости перенесли на драйвер двигателя.
4. Вращающийся торс: DRC-HUBO може поворачивать верхнюю часть своего тела на 180 градусов. Это значит, что колени робота могут быть развернуты в одну сторону, а смотреть он при этом способен в противоположную (сами попробуйте!). Эта способность работает не только когда когда он стоит, но и когда находится на коленях. Робот пользовался этой возможностью в нескольких заданиях, когда нужно было: водить транспортное средство, перфорировать стену, продвигаться через завалы и подниматься по ступенькам.
5. Длинные руки: члены команды KAIST поняли, что руки HUBO 2 слишком короткие для некоторых заданий, поэтому они сделали более длинные, поворачивающиеся на 7 градусов. Также они запрятали все кабели внутрь, чтобы те не цеплялись за окружающие предметы. Каждая рука может держать вес до 15 кг, а также имеет «адаптируемое захватное устройство», которое может хватать твердые и мягкие предметы.
6. Упрощенное зондирование: Вместо того чтобы заполнять голову датчиками, стереоскопическими камерами и лидарами, которые постоянно сканируют окружающую обстановку (данную технологию использует робот ATLAS, например), DRC-HUBO имеет упрощенную систему технического зрения; операторы полагаются на обычную камеру большую часть времени, а лидар, прикрепленный к сервоприводу, сканирует окружающую обстановку только по необходимости. Фактически у робота нет головы — “только глаза”, отметил один из студентов KAIST.
7. Мощность: когда двигатели требуют большой мощности, главная система питания, возможно, не сможет предоставить достаточно энергии важным компонентам машины. Чтобы избежать этого, команда использовала суперконденсатор, который поставляет энергию компьютерам, каналам передачи и некоторым сенсорам и гироскопам, даже если главная система питания отказывает.
8. Специальное ПО: команда использует ОС реального времени Xenomai для Linux и специальный фреймворк контроля движения, который называется PODO (разработка KAIST). Они также задействует среду моделирования Gazebo. Команда разработала свое ПО с фокусировкой на низкую пропускную способность и нестабильную связь между операторами и роботом.

А теперь давайте ближе рассмотрим DRC-HUBO и то, как он проходил все восемь заданий, что принесло победу команде из KAIST (если вы хотите посмотреть все полностью, это можно сделать по ссылке; ускоренный вариант здесь):
1. Задание по управлению автомобилем.
Командам разрешили произвести модификации в транспортном средстве Polaris, чтобы их роботам было легче вести авто и выходить из него. Команда KAIST установила металлическое устройство с двумя рычагами на дне автомобиля; когда DRC-HUBO нажимал на один из рычагов, кабельная система работала так, что второй рычаг нажимал на акселератор. Левой рукой робот держался за машину, а правой управлял рулем. Он выполнил это задание очень быстро (процесс занял немного больше минуты) и, в отличие от других команд, не останавливался, проходя препятствия.
2. Задание по выходу из транспортного средства.
Это было одно из самых сложных заданий. Готовясь к нему, профессор О, как он нам рассказал, сам выходил из машины несколько раз, чтобы понять, какие движения и части тела использует для этого. Он сделал вывод, что потребуется “динамический подход”. Его команда запрограммировала DRC-HUBO так, чтобы он поднял руки и держался за раму машины. Робот использует 100 ньютонов силы тяги для каждой руки. Когда руки поднимают тело робота, он по большому счету выпадает из машины, хотя движение контролируется (благодаря “динамическому подходу”). Обратите внимание на его прекрасный маневр по выходу из машины на отметке 1:00!
Профессор О сообщил, что во время отработки данного движения сгорело несколько моторов, но проблема была решена с использованием самых мощных, специально изготовленных двигателей. На данный момент робот может выйти из машины менее чем за 4 минуты, а когда он уже на земле, то садится на колени и уезжает.
3. Задание с дверью.
В отличие от других роботов, которые должны были стоять (и балансировать на двух ногах), чтобы выполнить это задание, DRC-HUBO мог стоять на коленях, поворачивая ручку двери. Он ловко использует вторую руку, чтобы держать дверь открытой, пока вращает дверную ручку. За менее чем 2 минуты он проехал через дверной проем.
4. Задание с задвижкой.
Заметьте, что в начале видео лидар двигается вверх и вниз, чтобы дать операторам возможность просканировать местность перед роботом. Потом, когда DRC-HUBO приближается к задвижке, он поворачивает верхнюю часть тела на 180 градусов. Обратите внимание на его движения на 0:20, потому что вы можете не заметить (угол съемки не показывает нижнюю часть тела робота, к сожалению). В данном положении, все еще на коленях, робот может поднять тело настолько, чтобы было легче управляться с задвижкой (зачем стоять, если в этом нет необходимости?). Робот сканирует местность с помощью лидара, определяет положение и через 3 минуты выполняет задание. Обратите внимание, что требовался лишь один поворот, но DRC-HUBO сделал два полных поворота! На 2:01 вы можете видеть как робот “возвращает” торс в обычное положение.
5. Задание со стеной.
Это было сложное задание для большинства команд, потому что робот должен был держать дрель и нажимать на кнопку вкл./выкл., чтобы использовать устройство. DRC-HUBO применил силомоментные датчики на каждой руке, чтобы лучше захватить инструмент. Вы можете видеть, как робот двигается сам и даже передвигает дрель на полке (сбивая другую дрель на пути), чтобы лучше захватить ее. Когда роботу удается захватить инструмент, операторы показывают место для перфорации, а все остальное робот выполняет сам. Он применяет 20 ньютонов силовой тяги, и вы можете увидеть, как он использует свое тело, чтобы двигать дрель идеально по кругу. Выполнение задания занимает у робота 11 минут.
6. Задание-сюрприз.
Данное задание состояло в том, чтобы вытянуть вилку и вставить ее в другую розетку. Обратите внимание, как DRC-HUBO сканирует пол и замечает, что дрель, котрую он отбросил ранее, лежит на его пути. Робот поворачивается и отодвигает инструмент коленями. Потом он пытается повернуться и кажется, будто он врезается в стену. Операторы, очевидно, замечают проблему, он выезжает немного вперед и тогда может развернуться. В конце концов робот приближается к стене с розеткой, которая установлена выше, чем задвижка и дверная ручка. Пришло время подняться на ноги, и вы можете наблюдать за этим, начиная с отметки 3:05. DRC-HUBO делает несколько шагов вперед и через некоторое время начинает выполнение задания. Он хватает вилку за кабель; мы считаем, что так было задумано, чтобы операторы могли лучше рассмотреть вилку и рука робота не заслоняла ее, что сделало бы выполнение задания невозможным. По времени вы можете видеть это на отметке 7:47, как робот старается вставить вилку и промахивается мимо розетки. После нескольких корректирующих движений, задание выполнено! Прошло 13 минут и 30 секунд — больше, чем для выполнения всех остальных заданий.
7. Задание по продвижению через завалы.
DRC-HUBO может двигаться коленями вперед или повернуть торс на 180 градусов и ехать ногами вперед, действуя как ковш бульдозера. И вот что он делает, чтобы выполнить задание. Вы можете видеть, как он поворачивает корпус на отметке 0:28. Это выглядит круто. Робот поднимает руки вверх — вероятно, чтобы они не запутались в мусоре. Потом начинает двигаться через завалы. Он останавливается лишь на секунду, когда кажется, будто кусок дерева застрянет в шлакоблоке, поэтому он немного поворачивает влево, чтобы убрать его с пути. Отодвигает пластиковую трубу вправо. На отметке 4:14 он поворачивает торс еще раз и становится напротив ступенек. Выполнение задания занимает менее 5 минут.
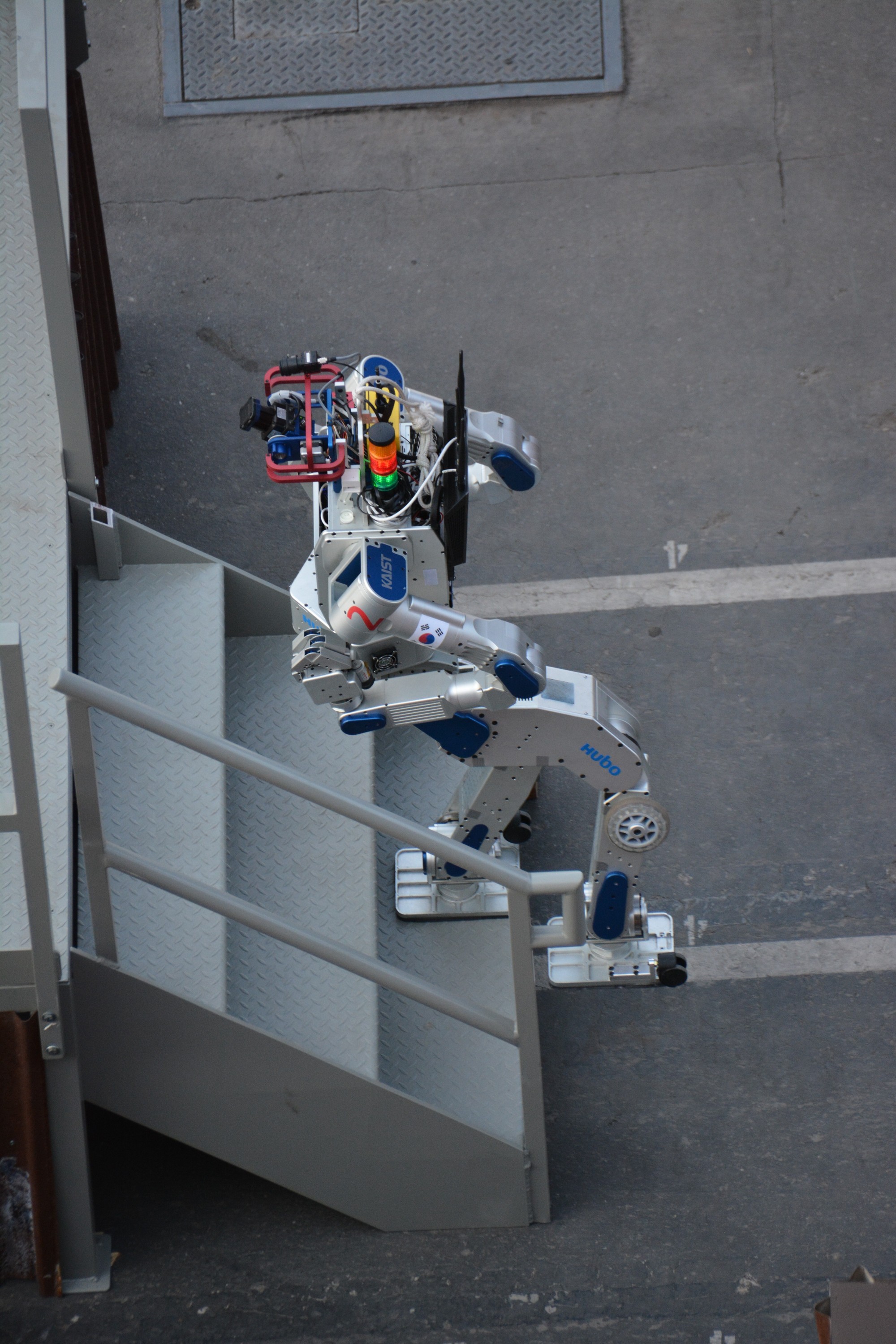
8. Задание со ступеньками.
Профессор О сказал, что для выполнения многих заданий, особенно это касается поднятия по ступенькам, важно, чтобы робот мог видеть свои ноги. Большие роботы типа ATLAS с трудом могут это делать, им нужно сгибать тело, что усложняет балансирование. DRC-HUBO решает эту проблему очень умным способом. Он взбирается по ступенькам задом наперед! Таким образом его колени не блокируют камеры и можно видеть ноги и землю. Но как он может видеть ноги, если поднимается задом наперед? Повернув торс, конечно же! Вы можете видеть весь процесс, начиная с отметки 0:26. Робот становится на колени перед лестницей, и тут внезапно поворачивается к ней спиной. Потом встает, и на 0:55 вы увидите, как он поворачивает торс на 180 градусов. Теперь он может просканировать ступеньки и начать подниматься. Но обратите внимание, что перед этим он делает два шага в сторону, влево (1:45)! Через пару минут — которые показались вечностью для зрителей — робот наконец-то начинает подниматься, преодолевая последние три ступеньки одна за другой. Четко! За менее чем 7 минут DRC-HUBO стоит на платформе. На видео нет звука, но в этот момент команда и зрители взорвались аплодисментами.
KAIST сделали четыре экземпляра DRC-HUBO и практиковались без страховочных тросов более месяца перед соревнованием. Они тренировались на улице, на парковке с неровной поверхностью и в разных погодных условиях, включая сильный солнцепек и ветер. “Если мы не уберем страховочные тросы, операторы будут бояться”, — сказал профессор О на мастер-классе после соревнований.
Он добавил, что во время тренировок они выполняли все задания в обоих режимах – стоя и на коленях (средний показатель времени составлял 30 минут). У команды хорошо получалось расчищать завалы руками DRC-HUBO, что им не удалось продемонстрировать на DRC Finals, и они также могли выполнять задания на более сложной поверхности, чем та, которая была на соревновании.
Жаль, что мы не смогли показать все способности робота на соревновании… все было слишком просто! - сказал профессор О, спускаясь со сцены под аплодисменты.
Комментарии (7)

Darth_Biomech
12.06.2015 20:32Хм, мне казалось я где-то читал что телеуправление операторами на этом конкурсе как раз таки запрещено, и что мол робот должен все или почти все сделать самостоятельно. Я что-то неправильно прочел, или просто правила с той поры поменялись?




batja84
14.06.2015 03:21Выглядит очень интересно. Но местами совсем не понятно где вмешивается человек, где робот сам принимает решение.
Хотелось бы увидеть сравнительную таблицу с результатами конкурентов во всех конкурсах.

Scorpi
Есть ещё очень забавная подборка фейлов роботов с этого конкурса:
www.youtube.com/watch?v=g0TaYhjpOfo