

Ранее в наших публикациях мы уже неоднократно поднимали тему применения квадрокоптеров в телекоммуникациях. Несколько материалов на эту тему, основанных на практических применениях появлялись в нашем блоге.
Однако сегодня речь пойдет о применении коптеров при организации беспроводных сетей. Об этом уже не раз говорилось и помнится фейсбук собирался раздавать интернет по всей планете с помощью беспилотников. Использовать дроны собирались и в МЧС, например, при организации кратковременного радиопокрытия при организации различных спасательных работ или иных мероприятий. В общем, во всех тех ситуациях, в которых необходимо быстрое развертывание беспроводных сетей.
В этом материале хотелось бы представить исследование зарубежных специалистов, в котором наглядно демонстрируются результаты эксперимента с дроном, выступающим в качестве точки доступа.
О методологии и особенностях устройств эксперимента
В качестве основного элемента системы использовалась плата Intel Galileo. Плата основана на основе 32-битного центрального процессора Quark SoC x 1000 Intel с тактовой частотой 400 МГц. В качестве программного обеспечения использовалась версия Linux quark 3.19.8 yocto-standard. Источник питания — аккумулятор 10400 мАч, способная обеспечить Galileo до 15 часов автономной работы. В плате Galileo через порт PCI Express была подключена беспроводная карта Intel Dual Band Wireless-AC 7260. Карта способна обеспечить скорость передачи данных до 867 Мбит/сек. Работает на нескольких стандартах Wi-Fi (802.11a/b/g/n/ac). К карте подключили две внешние антенны с усилением в 5 dBi. Общий вес платы Galileo, аккумуляторной батареи и всей антенной части составил 340 грамм.
Первый этап эксперимента заключался в исследовании теоретических возможностей покрытия беспилотника. Расчет производили с помощью моделей распространения радиосигнала: «Free Space» и модель «Wireless Initiative New Radio» –WINNER D1.
С помощью этих моделей рассчитали предполагаемые максимальные дальности распространения для восходящего и нисходящего канала связи нескольких версий Wi-Fi. Кроме того произвели замеры производительности платы Galileo в качестве промежуточного узла сети Wi-Fi.
В основу эксперимента легли два режима работы беспроводных точек доступа. Первый — “Инфраструктурный” — реализуется в большинстве коммерческих сетей Wi-FI. В таком режиме точка доступа — это центральный узел связи, соединяющий устройства в сети и выступающей вроде шлюза в интернет. В таком режиме точка доступа берет на себя все задачи по управлению сетью.
Второй режим — это «Ad-Hoc». Он не менее распространен и представляет из себя ячеистую сеть, где ни одна из точек доступа не является центровой. Все узлы равноправны и каждый берет на себя задачи хоста либо маршрутизатора. Узлы Ad-Hoc могут перемещаться, образуя так называемую мобильную сеть (Mobile Ad-hoc NETwork — MANET). Достоинство этого режима заключается в том, что соединение между узлами может быть динамически изменено при перемещении устройств. Но эффективная работа такой сети может сильно зависеть от алгоритмов маршрутизации, отвечающих за доставку пакет между узлами сети. Из-за динамического характера топологии сети «стоимость» пути между узлами должна периодически пересчитываться для поиска наилучших путей.
Для тестов в работу сети подключили два дополнительных устройства. В качестве узлов сети выступали два ноутбука с ОС Linux Ubuntu и Wi-Fi картой IEEE 802.11 a/b/g/n. На приемной стороне был установлен ноутбук с беспроводной картой Intel Centrino Advance-N 6230 и на другом конце ноутбук с картой Intel Dual Band 3160. Центральной частью системы всегда оставалась плата Intel Galileo, работающая в режиме AP (инфраструктурный режим), либо в качестве одного из промежуточных узлов (Ad-Hoc) между передатчиком и приемником. В последнем устройстве был использован протокол маршрутизации BATMAN, отлично зарекомендовавший себя. Получение метрик сети осуществлялось с помощью iPerf3. В этом эксперименте использовалась передача с постоянной скоростью между узлами сети со следующими параметрами: продолжительность передачи – 30 сек; скорость передачи: 1, 3, 5, 7, 9, 11 Мбит/сек; размер пакета: 512 и 1024 байта.
Измерения параметров реальной воздушной сети производились по следующей схеме:
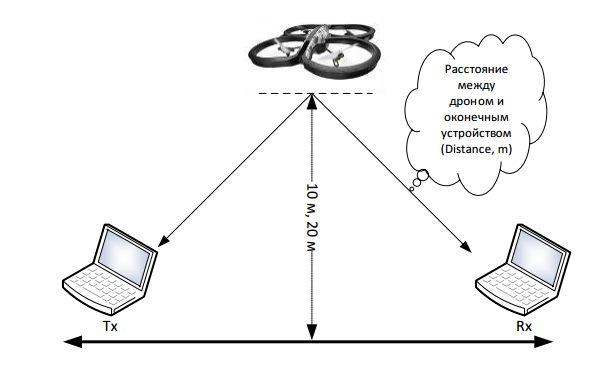
Два оконечных устройства постепенно удалялись друг от друга вдоль оси Х. В точках измеряли пропускную способность сети с помощью сетевого анализатора iPerf3, и максимальный уровень сигнала с помощью анализатора спектра Rohde&Schwarz FSH3. Квадрокоптер зависал на высоте 10 и 20 метров, на которых и производились измерения. Так выглядел беспилотник:

Радиус действия
Как мы уже отмечали в основе эксперимента проводилось измерение дальности связи и расчет покрытия согласно моделям распространения радиоволн «Free Space» (свободного пространства) и модель WINNER D1. Формулу Фрииса используют, когда нужно вычислить длину радиосигнала между передатчиком и приемников при отсуствии между ними препятствий.
Эта модель применяется только при расчете полей в дальней зоне, расчет производится по формуле:

Модель WINNER D1 — это стохастическая модель. Она учитывает потери в беспроводном канале связи. Определяется по формуле:

В ней неопределенные буквенные переменные имеют следующие значения A = 21.5, B= 44.2, и C = 20.
При расчетах мощность передатчика для Uplink и Downlink была принята равной 20 дБм (100 мВт). Расчет дальности связи производился для разных версий стандартов IEEE 802.11. В таблице ниже приведены результаты расчетов для нисходящего канала (Downlink) и для восходящего (Uplink). При расчетах было принято, что БПЛА находится на высоте 10 м.
В реальном эксперименте оценивался уровень принимаемого сигнала. На рисунке ниже приводится уровень сигнала в зависимости от расстояния для инфраструктурного режима работы (слева) и режима Ad-hoc (справа) при работе дрона на высоте 10 метров.

Те же экспериментальные данные но для работы дрона на высоте 20 метров:
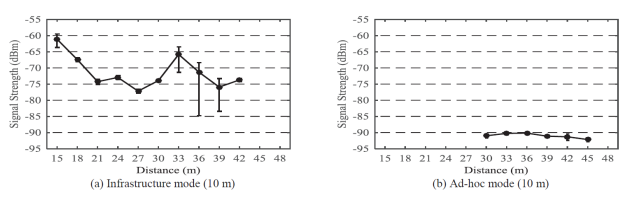
По результатам видно заметное различие между теоретическими и полученными на практике значениями. Они вызваны множеством дополнительных факторов. Однако в целом же уровень принимаемого сигнала значительно выше сигнала, полученного в Ad-hoc. На рисунках b и d изображено меньше измеренных контрольных точек, так как фиксировались только те измерения, которые были получены при работе беспилотника в качестве промежуточной точки между двумя оконечными устройствами. Результаты, полученные при непосредственном подключении передатчика и приемника ноутбука, в расчет не брались. Другими словами, когда расстояние между конечными точками доступа было меньше 60 метров (для высоты дрона 10 метров) или 80 метров (для высоты 20 метров), квадрокоптер не выступал в качестве промежуточного устройства в режиме Ad-hoc.
Скорость передачи данных
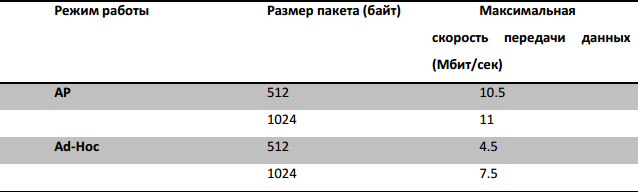
Для оценки производительности инфраструктурного режима работы и режима Ad-hoc с точки зрения максимальной пропускной способности использовалась программа iPerf, с помощью которой запускались пакеты между оконечными точками доступа. Первые измерения провели в лабораторных условиях. Мерялась скорость в нескольких режимах работы и пакетах размером 512 и 1024 байт.
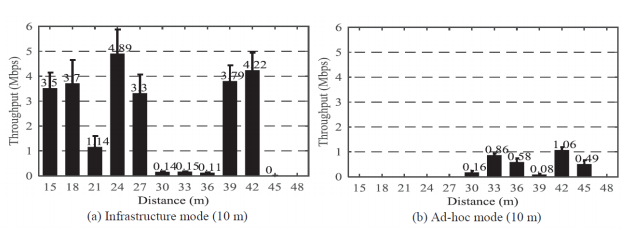
Следующие измерения провели в реальных условиях. Скорость в инфраструктурном режиме выше скорости в Ad-hoc сети.
Для инфраструктурного режима работы (слева) и режима Ad-hoc (справа) при работе дрона на высоте 10 метров:
Те же экспериментальные данные но для работы дрона на высоте 20 метров:
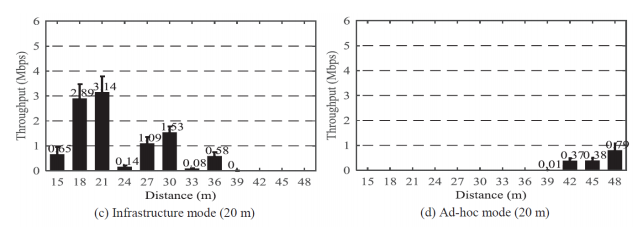
Максимальная скорость передачи данных по Wi-F различна в зависимости от версии стандарта 802.11. Главным образом она определяется методами модуляции, шириной канала, количеством пространственных потоков, кодированием и методами расширения спектра.
Максимально достижимые скорости для рассматриваемого эксперимента приведены ниже:
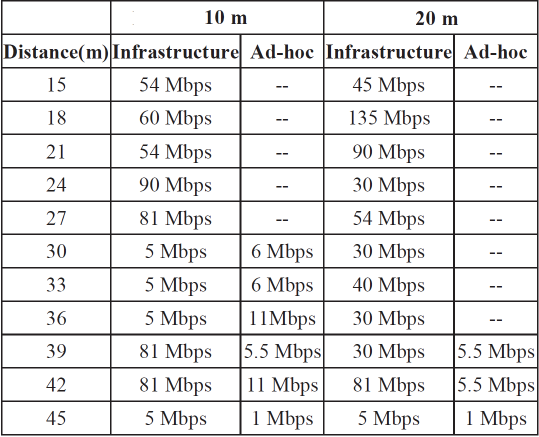
Увеличение расстояния влияет на качество связи. В свою очередь это вынуждает сетевые карты прибегать к более консервативным методам модуляции и уменьшению скорости передачи данных. В инфраструктурном режиме получается выдерживать более высокие скорости передачи.
Выше в ходе экспериментов было наглядно показано какие возможности открываются при использовании квадрокоптеров для развертки беспроводных автоматически конфигурируемых mesh-сетей. С развитием технологий связи и беспилотных летательных аппаратов возможностей для развития именно такого способа построения сети станет в разы больше
Комментарии (24)


Dmitry_5
08.09.2017 14:45Нет ли усилителей для лучшей связи с коптером?
Чтобы поставить антенну удочкой в землю и репитер, сам видел такие системы у моделистов
superhimik
08.09.2017 14:48+1Напишите, пожалуйста, статью, как во время несанкционированных мероприятий сделать так, чтобы можно было пользоваться интернетом и власти тебя не заглушали. Поможет ли в этом дрон?

QDeathNick
08.09.2017 15:10+1Если уж есть полномочия выключать базы ОпСоСов, то и сбить дрон тоже не будет проблемой.
Ну разве что дрон будет активно прятаться от сбивающих, но это не так и просто.
Но зачем дроны, бюджетнее цепочка из дешёвых роутеров повторителей, та же mesh, но на земле, развернуть проще, питание наладить проще.superhimik
08.09.2017 15:13а можно всё то же самое, только словами как для
суперхимика? :)QDeathNick
08.09.2017 17:08Ну и задачу вы задаёте, на химическом уровне объяснить как развернуть Wi-Fi сеть.
Думаю лучше зайти тогда со стороны биологии. Находите биологического субъекта умеющего в сисадмина, покупаете кучу Wi-Fi репитеров, с питанием от USB, втыкаете в банки, как показано на одной из картинок.
И просите его настроить все на повторение сети, которую гарантировано не заблокируют, а вот с этим уже сложнее. Надо искать какую-то проводную и чтобы провод сразу за границу :).
Потом раздаёте своим волонтёрам и учите как надо ходить, глядя на уровень сигнала, чтобы сеть работала.
Гарантий, что всё сразу заработает я не дам, надо тестировать, как это всё будет работать с большим количеством перемещающихся повторителей в одном месте. Но думаю это дешевле и проще, чем если вместо волонтёров будут дроны.
technomancer
08.09.2017 18:53Кажется, господин химик имел в виду простых граждан, проживающих в непосредственной близости от мест проведения таких мероприятий.
QDeathNick
11.09.2017 12:13Тем кто там проживает проще, дешевле, выгоднее по массе пунктов, провести проводной инет. Готовить дрон на случай крайне редкого глушения ни как не имеет смысла. Гарантий мало, а затрат много.
mike_y_k
08.09.2017 16:10Если начнут активно глушить радиосигнал — только проводами.
Постановщиков помех — вагон и тележка самых разных.
Будет интересен вариант взаимного глушения в более широком диапазоне ;).
Разрушить систему передачи приказов… правда у них может быть весьма неадекватная инструкция на такой случай.superhimik
08.09.2017 16:21ну, все инструкции, кроме одной, уже были опробованы. провода — не вариант.
mike_y_k
09.09.2017 00:23Как альтернатива — оптический диапазон ;).
Или резко снижать частоту расширяя спектр.
Получится медленно, но с очень большими проблемами для постановки помех. В таком варианте глушения уже никакая и ничья связь не будет работать.superhimik
09.09.2017 05:13оптический диапазон — это как? флажками?
mike_y_k
09.09.2017 13:37Флажки и семафор слишком медленно :D.
Соответствующая модуляция оптического излучения — наше все ;).
Собственно нужная база уже практически есть — ВОЛС. Да и работающая замена WiFi с использованием оптического диапазона тоже вполне работоспособна.
Остаётся развернуть инфраструктуру и позаботится о клиентском оборудовании.
Ну и продумать защиту потоков данных. Наверное на сессионных ключах будет оптимальнее. Это уже аспекты выбора реализации.
Остаётся вопрос с энтузиастами и бюджетом.
mike_y_k
08.09.2017 16:05Хорошая работа в академическом стиле.
Собственно для полученного результата не стоило столько возиться, особенно при отсутствии данных и выводов для корреляции расчётов для поля.
Странен выбор круговых антенн — там бы 180° больше подошли.
В плане реализации покрытия при ЧС — шары со всех позиций сильно выигрывают, а уже имеющиеся тросы позволят питать всю систему с земли.
Как версия для небольшого междусобойчика на природе разве только, но это уже для ограниченного числа желающих.
Кстати в реализации не учтены ещё и накладные расходы на защиту трафика (WPA2, VPN, …).
SandroSmith
09.09.2017 01:52+1Мне одному кажется, что с последней табличкой что-то не так? Сначала скорость растёт с увеличением расстояния. Потом резко падает до 5 Мб/с. Потом опять 81. Потом опять 5.
Ну либо я чего-то совсем не понял.

technomancer
Плата с аккумулятором, а на фотографии снизу провод — вероятно, питающий коптер, который держит в воздухе этот же аккумулятор. Неоднозначное решение.
Rumlin
Сначала понял «питающий коптер» как второй коптер-дозаправщик, питающий эту летающую точку и сменяющийся другим при израсходовании заряда.
Имхо при высотах 10-20 метров имеет смысл разворачивать телескопическую мачту или поднимать станцию на шаре, например для метеозондов, и удерживаемую тросиком. Надежность выше.
technomancer
Тоже сначала хотел предложить шар, но шару потребуется несколько тросиков-растяжек, а это подразумевает дополнительную возню и изымаемое из использования пространство. Ради мероприятий на час-два коптеры могут показаться удобнее. Другое дело, у шара не сдохнет движок :-)
А мачта тяжеловата будет. И те же самые растяжки. И персонал на разворачивание. И стоит, кстати (я одно время просматривал варианты) огогошеньки.
А если растяжки не выдержат, и ветер их оборвет? Коптер при поломке прихлопнет не больше одного человека, шар, скорее всего, просто ляжет к земле. Зато вот мачта…
Rumlin
Если речь об МЧС, то им стоимость не критична. И персонала у них полно. За счет бюджета можно и мачту и коптеры новые покупать, как только один движок сломается.
technomancer
Вряд ли МЧС понадобится изобретать что-то, чтобы получить связь на 60 метрах. Тем более — на основе роя дронов. А проблема смерти движка больше из-за отказа коптера в полете (падения куда-то), чем в замене детали на новую.