
Завершая неделю интернета вещей на хабре и в продолжение предыдущего поста о партнерстве с Arduino, расскажу вам о подключении устройств к Windows. Я уже писал про различные сценарии подключения датчиков к облаку, но бывают сценарии, когда нам хочется просто подключить датчики или устройства к нашему компьютеру и удаленно ими управлять. Например, мы хотим сделать приложение, которое будет включать и выключать настольную лампу. В этих случаях самым простым решение будет использование Windows Remote Arduino.
Windows Remote Arduino – это библиотека WinRT, которая позволяет управлять цифровыми и аналоговыми каналами платы Arduino из Windows/Windows Phone приложения, с помощью привычных команд типа digitalRead/Write и analogRead/Write. При этом сама плата может быть подключена к компьютеру по USB или Bluetooth – важно, чтобы обеспечивался последовательный канал передачи данных. Помимо простых команд включения/выключения входов/выходов, в том или ином виде предусмотрена работа с шиной I2C и (в перспективе) сервоприводами.

Для работы необходимо, чтобы на плате Arduino была запущена специальная программа, поддерживающая выполнение команд по протоколу Firmata. Библиотека Windows Remote Arduino обменивается командами с платой, предоставляя программисту высокоуровневые функции управления.
Windows Remote Arduino доступна для Windows 8.1/Windows Phone 8.1 и для универсальных приложений Windows 10. Чтобы использовать их в своем проекте, в настоящее время проще всего клонировать Git-репозиторий проекта и добавить необходимые проекты в своё решение (пример я опишу ниже).
В моём примере я буду разрабатывать интеллектуальное приложение, включающее настольную лампу. Для этой цели я использую плату Arduino Uno и реле, способное коммутировать 220В. Реле подключается к какому-нибудь цифровому выходу (например, 7). Также для обнаружения присутствия человека будем использовать инфракрасный датчик присутствия, который включим в аналоговый вход A0. Для удобства коммутации мы используем Troyka Shiled от Амперки. На приведенном выше видео смотрите подробнее про hardware setup, а также весь проект в действиии.
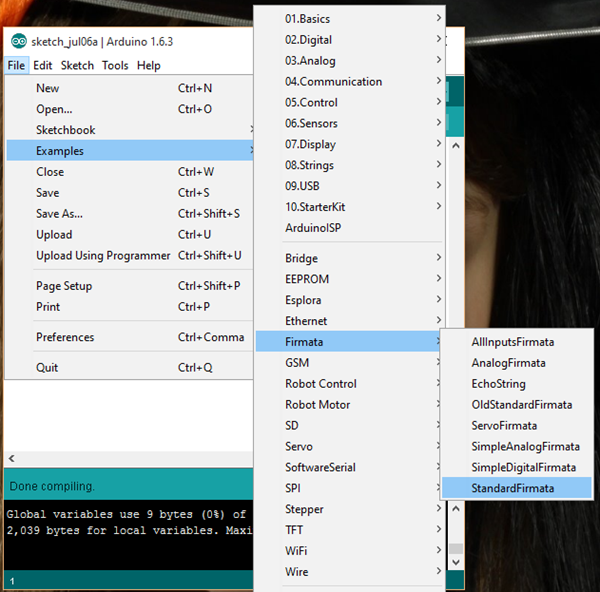
Первым делом необходимо установить на плату Arduino стандартный скетч для выполнения команд Firmata. Такой скетч уже включен в стандартную поставку Arduino IDE – достаточно выбрать в меню File –> Examples –> Firmata –> Standard Firmata. Открывшийся при этом скетч необходимо загрузить в плату обычным образом.
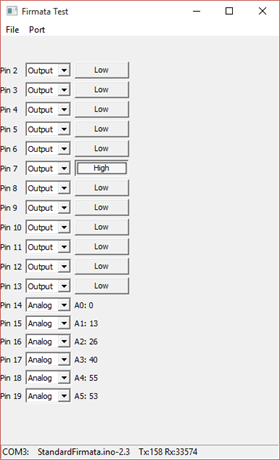
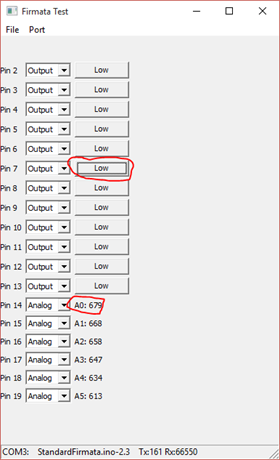
На этом этапе полезно будет убедиться, что все аппаратное обеспечение настроено правильно. Для этого можно использовать специальную программу firmata_test.exe (или любую из программ, описанных здесь) – вы должны быть в состоянии управлять лампочкой, переключая состояние цифрового выхода 7, а также на входе A0 вы должны получать значение 0, если движения вокруг сенсора нет, и большое положительное значение (около 600 и более) в противном
Чтобы использовать Windows Remote Arduino в своём проекте, необходимо подключить соответствующие библиотеки. На текущий момент технология достаточно молодая, и библиотеки существуют в виде исходных текстов. Мы надеемся, что со временем появятся пакеты NuGet, сейчас же процесс включения библиотек выглядит следующим образом:
Наше приложение будет иметь три кнопки: для включения лампочки, для выключения, и для авто-режима, в котором лампочка будет управляться датчиком присутствия. Для начала добавим на главную страницу приложения MainPage.xaml эти три кнопки, установив их в неактивное состояние:
Этот код добавляется внутрь того контейнера Grid, который уже по умолчанию есть у страницы. Также для каждой кнопки создадим функцию-обработчик на C# (кликнув дважды на каждую кнопку, или через окно свойств Visual Studio).
Для начала инициализируем объект Remote Arduino. Для этого в классе окна в файле MainPage.xaml.cs опишем две переменные:
Для подключение к Arduino опишем функцию connect(), которую затем вызовем из конструктора MainPage():
Здесь мы сначала определяем список доступных портов, куда может быть подключен Arduino, затем создаем последовательное соединение UsbSerial с этим портом, а затем поверх этого – объект RemoteDevice, который будет представлять собой виртуальный Arduino. После этого мы вызываем функцию begin, передавая параметры последовательного соединения.
ВАЖНО: Скорость последовательного канала, используемая протоколом Firmatа, задается в скетче StandardFirmata. По умолчанию она равна 57600, поэтому мы выбираем именно эту скорость в нашем приложении. Если скорости не будут совпадать, то соединение не будет работать.
При установлении соединения с платой, будет вызвана функция Comm_ConnectionEstablished, которую мы опишем следующим образом:
Основной код функции обернут в вызов диспетчера, который запускает его в потоке UI – это важно. Далее мы устанавливаем режимы основных используемых пинов Arduino, создаем таймер, который будет вызывать каждые пол-секунды функцию loop(), а также делаем кнопки видимыми.
Интересный момент – установка порта 14 в аналоговый режим. Дело в том, что аналоговые входы в Arduino нумеруются после цифровых, и входу A0 соответствует номер 14. Режим необходимо установить именно ANALOG, а не INPUT, который означает цифровой ввод.
Теперь для включения/выключения лампочки достаточно описать функции-обработчики событий кнопок следующим образом:
Функция off_Click делается по аналогии. Обратите внимание, что для работы с пинами удалённой платы Arduino используются привычные команды типа digitalRead/digitalWrite.
Переменная auto_mode – это переменная типа bool, которую нужно описать в нашем классе. Она нужна для того, чтобы обрабатывать автоматический режим. Кнопка AUTO будет устанавливать эту переменную в true:
Теперь дело осталось за малым – реализовать функцию loop, которая будет переключать лампу в зависимости от наличия сигнала с датчика присутствия. Делать это надо только в том случае, если auto_mode установлен:
ВАЖНО: Для более надежной работы прямо перед чтением порта лучше еще раз установить его режим в аналоговый. Так быть не должно, но на практике это улучшает стабильность. Также обратите внимание, что мы используем analogRead(0), хотя строчкой ранее указывали номер порта 14. В analogRead передается номер порта от 0 до 5, при установке режима порта надо прибавить к этим номерам 14.
В нашем случае мы написали универсальное приложение, которое можем разместить на Windows Phone 10. Однако это бесполезно, поскольку подключить плату Arduino по USB к смартфону невозможно. Однако если мы будем использовать Bluetooth вместо USB-соединения, подключив к Arduino bluetooth-плату, то мы сможем этим же приложением управлять нашей конструкцией со смартфона. В этом случае в манифест приложения необходимо добавить следующие строчки для разрешения коммуникации по Bluetooth:
Мы не будем сейчас рассматривать использование bluetooth – это тема для отдельной статьи. Однако заметим, что с точки зрения программирования разницы почти нет – надо использовать объект BluetoothSerial вместо UsbSerial, а все остальные конструкции остаются без изменений.
Исходный код моего проекта по традиции доступен на GitHub: https://github.com/evangelism/RemoteArduinoLamp/tree/v1.0-serial. Пожалуйста, берите его, экспериментируйте, если найдете ошибки – делайте pull requests.
Windows Remote Arduino – достаточно молодая и сырая технология, но уже сейчас она может упростить решения ряда задач, в которых необходимо напрямую управлять входами/выходами платы Arduino, подключенной к компьютеру. Конечно, всё тоже самое можно запрограммировать вручную, написав свой скетч и используя последовательный канал для взаимодействия с ним, но почему бы не использовать уже готовые наработки и сложившиеся стандарты (Firmata), чтобы не изобретать велосипеды.
Я надеюсь, вы будете использовать Windows Remote Arduino в своих проектах, и если вы сделаете что-то интересное – мне будет приятно об этом узнать! Пишите в комментариях, в твиттере или вконтакте!
Что такое Windows Remote Arduino
Windows Remote Arduino – это библиотека WinRT, которая позволяет управлять цифровыми и аналоговыми каналами платы Arduino из Windows/Windows Phone приложения, с помощью привычных команд типа digitalRead/Write и analogRead/Write. При этом сама плата может быть подключена к компьютеру по USB или Bluetooth – важно, чтобы обеспечивался последовательный канал передачи данных. Помимо простых команд включения/выключения входов/выходов, в том или ином виде предусмотрена работа с шиной I2C и (в перспективе) сервоприводами.
Для работы необходимо, чтобы на плате Arduino была запущена специальная программа, поддерживающая выполнение команд по протоколу Firmata. Библиотека Windows Remote Arduino обменивается командами с платой, предоставляя программисту высокоуровневые функции управления.
Windows Remote Arduino доступна для Windows 8.1/Windows Phone 8.1 и для универсальных приложений Windows 10. Чтобы использовать их в своем проекте, в настоящее время проще всего клонировать Git-репозиторий проекта и добавить необходимые проекты в своё решение (пример я опишу ниже).
Пример – включатель лампочки
В моём примере я буду разрабатывать интеллектуальное приложение, включающее настольную лампу. Для этой цели я использую плату Arduino Uno и реле, способное коммутировать 220В. Реле подключается к какому-нибудь цифровому выходу (например, 7). Также для обнаружения присутствия человека будем использовать инфракрасный датчик присутствия, который включим в аналоговый вход A0. Для удобства коммутации мы используем Troyka Shiled от Амперки. На приведенном выше видео смотрите подробнее про hardware setup, а также весь проект в действиии.
Устанавливаем скетч Firmata на плату Arduino
Первым делом необходимо установить на плату Arduino стандартный скетч для выполнения команд Firmata. Такой скетч уже включен в стандартную поставку Arduino IDE – достаточно выбрать в меню File –> Examples –> Firmata –> Standard Firmata. Открывшийся при этом скетч необходимо загрузить в плату обычным образом.
На этом этапе полезно будет убедиться, что все аппаратное обеспечение настроено правильно. Для этого можно использовать специальную программу firmata_test.exe (или любую из программ, описанных здесь) – вы должны быть в состоянии управлять лампочкой, переключая состояние цифрового выхода 7, а также на входе A0 вы должны получать значение 0, если движения вокруг сенсора нет, и большое положительное значение (около 600 и более) в противном
Готовим проект с Windows Remote Ardunio
Чтобы использовать Windows Remote Arduino в своём проекте, необходимо подключить соответствующие библиотеки. На текущий момент технология достаточно молодая, и библиотеки существуют в виде исходных текстов. Мы надеемся, что со временем появятся пакеты NuGet, сейчас же процесс включения библиотек выглядит следующим образом:
- Создайте новый проект – в нашем случае это будет универсальное приложение Windows 10
- Клонируйте GitHub-репозиторий проекта Windows Remote Arduino в какую-нибудь локальную папку:
git clone https://github.com/ms-iot/remote-wiring/
ВАЖНО: в репозитории имеются несколько версий библиотеки. На момент написания статьи последняя ветка master содержала много ошибок при работе с аналоговыми и цифровыми входами, поэтому я использовать наиболее стабильную ветку revert-18-develop. Очень надеюсь, что в скором времени выйдет еще более стабильная версия, и клонировать можно будет как показано выше, без указания ветки. - В получившемся дереве проектов есть папки Microsoft.Maker.Win10 и Microsoft.Maker.Win8_1. Мы будем использовать вариант для Windows 10, но проект поддерживает и универсальные приложения Windows 8.1
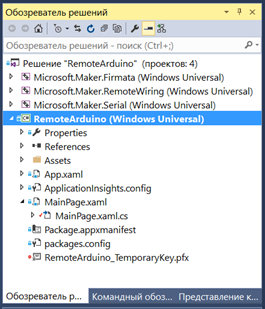
- В папке Microsoft.Maker.Win10 есть три проекта: Microsoft.Maker.Firmata, Microsoft.Maker.Serial и Microsoft.Maker.RemoteWiring. Эти три проекта нужно добавить в созданный нами проект (Add Existing Project)
- В результате получится следующее дерево проектов:
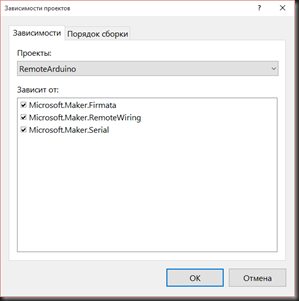
- Чтобы проекты компилировались в правильном порядке, необходимо установить правильные зависимости проектов. Нажмите правой кнопкой на наш проект, выберите “Зависимости сборки –> Зависимости проектов”, и установите галочки напротив всех трех добавленных проектов. Остальные зависимости должны быть уже установлены, но вы можете их проверить: проект Firmata зависит от проекта Serial, проект RemoteWiring – от проектов Firmata и Serial. Соответственно, на вкладке “Порядок сборки” проекты должны собираться в таком порядке: Serial, Firmata, RemoteWiring и наше приложение.
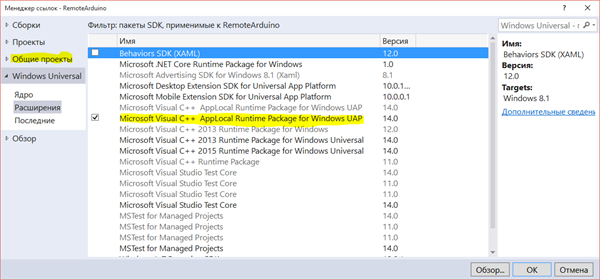
- В нашем основном проекте правой кнопкой нажмите на References и добавьте расширение Microsoft Visual C++ AppLocal Runtime Package for Windows UAP. Там же в пункте “Общие проекты” выберите все три добавленных проекта Windows Remote Arduino.
- ВАЖНО: Чтобы наше приложение могло использовать возможности работы с последовательным портом, необходимо в манифест приложения (файл Package.appxmanifest) в раздел
<Capabilities>
добавить следующий код:
<DeviceCapability Name="serialcommunication"> <Device Id="any"> <Function Type="name:serialPort"/> </Device> </DeviceCapability>
- Мы готовы к созданию нашего приложения, которое будет использовать библиотеки Windows Remote Arduino! Чтобы убедиться, что всё работает правильно, попробуйте выполнить сборку получившегося приложения.
Создаем приложение с Windows Remote Arduino
Наше приложение будет иметь три кнопки: для включения лампочки, для выключения, и для авто-режима, в котором лампочка будет управляться датчиком присутствия. Для начала добавим на главную страницу приложения MainPage.xaml эти три кнопки, установив их в неактивное состояние:
<StackPanel Orientation="Horizontal" HorizontalAlignment="Center" VerticalAlignment="Center">
<Button x:Name="on" IsEnabled="False" Content="ON" FontSize="30" Width="150" Height="150" Click="on_Click"></Button>
<Button x:Name="off" IsEnabled="False" Content="OFF" FontSize="30" Width="150" Height="150" Click="off_Click"></Button>
<Button x:Name="auto" IsEnabled="False" Content="AUTO" FontSize="30" Width="150" Height="150" Click="auto_Click" ></Button>
<TextBlock x:Name="txt"/>
<ListBox x:Name="lst"/>
</StackPanel>
Этот код добавляется внутрь того контейнера Grid, который уже по умолчанию есть у страницы. Также для каждой кнопки создадим функцию-обработчик на C# (кликнув дважды на каждую кнопку, или через окно свойств Visual Studio).
Для начала инициализируем объект Remote Arduino. Для этого в классе окна в файле MainPage.xaml.cs опишем две переменные:
UsbSerial usbcomm;
RemoteDevice arduino;
Для подключение к Arduino опишем функцию connect(), которую затем вызовем из конструктора MainPage():
private async void connect()
{
var dev = await UsbSerial.listAvailableDevicesAsync();
usbcomm = new UsbSerial(dev[0]);
arduino = new RemoteDevice(usbcomm);
usbcomm.ConnectionEstablished += Comm_ConnectionEstablished;
usbcomm.begin(57600, SerialConfig.SERIAL_8N1);
}
Здесь мы сначала определяем список доступных портов, куда может быть подключен Arduino, затем создаем последовательное соединение UsbSerial с этим портом, а затем поверх этого – объект RemoteDevice, который будет представлять собой виртуальный Arduino. После этого мы вызываем функцию begin, передавая параметры последовательного соединения.
ВАЖНО: Скорость последовательного канала, используемая протоколом Firmatа, задается в скетче StandardFirmata. По умолчанию она равна 57600, поэтому мы выбираем именно эту скорость в нашем приложении. Если скорости не будут совпадать, то соединение не будет работать.
При установлении соединения с платой, будет вызвана функция Comm_ConnectionEstablished, которую мы опишем следующим образом:
private void Comm_ConnectionEstablished()
{
Dispatcher.RunAsync(Windows.UI.Core.CoreDispatcherPriority.Normal,new Windows.UI.Core.DispatchedHandler(() =>
{
arduino.pinMode(14, PinMode.ANALOG);
arduino.pinMode(relay_pin, PinMode.OUTPUT);
dt = new DispatcherTimer() { Interval = new TimeSpan(500) };
dt.Tick += loop;
dt.Start();
on.IsEnabled = true;
off.IsEnabled = true;
auto.IsEnabled = true;
}));
}
Основной код функции обернут в вызов диспетчера, который запускает его в потоке UI – это важно. Далее мы устанавливаем режимы основных используемых пинов Arduino, создаем таймер, который будет вызывать каждые пол-секунды функцию loop(), а также делаем кнопки видимыми.
Интересный момент – установка порта 14 в аналоговый режим. Дело в том, что аналоговые входы в Arduino нумеруются после цифровых, и входу A0 соответствует номер 14. Режим необходимо установить именно ANALOG, а не INPUT, который означает цифровой ввод.
Теперь для включения/выключения лампочки достаточно описать функции-обработчики событий кнопок следующим образом:
private void on_Click(object sender, RoutedEventArgs e)
{
auto_mode = false;
arduino.digitalWrite(relay_pin, PinState.HIGH);
}
Функция off_Click делается по аналогии. Обратите внимание, что для работы с пинами удалённой платы Arduino используются привычные команды типа digitalRead/digitalWrite.
Переменная auto_mode – это переменная типа bool, которую нужно описать в нашем классе. Она нужна для того, чтобы обрабатывать автоматический режим. Кнопка AUTO будет устанавливать эту переменную в true:
private void auto_Click(object sender, RoutedEventArgs e)
{
auto_mode = true;
}
Теперь дело осталось за малым – реализовать функцию loop, которая будет переключать лампу в зависимости от наличия сигнала с датчика присутствия. Делать это надо только в том случае, если auto_mode установлен:
private void loop(object sender, object e)
{
if (auto_mode)
{
arduino.pinMode(14, PinMode.ANALOG);
var on = arduino.analogRead(0) > 512;
arduino.digitalWrite(relay_pin, on ? PinState.HIGH : PinState.LOW);
}
}
ВАЖНО: Для более надежной работы прямо перед чтением порта лучше еще раз установить его режим в аналоговый. Так быть не должно, но на практике это улучшает стабильность. Также обратите внимание, что мы используем analogRead(0), хотя строчкой ранее указывали номер порта 14. В analogRead передается номер порта от 0 до 5, при установке режима порта надо прибавить к этим номерам 14.
Как подключить Arduino по Bluetooth и управлять со смартфона
В нашем случае мы написали универсальное приложение, которое можем разместить на Windows Phone 10. Однако это бесполезно, поскольку подключить плату Arduino по USB к смартфону невозможно. Однако если мы будем использовать Bluetooth вместо USB-соединения, подключив к Arduino bluetooth-плату, то мы сможем этим же приложением управлять нашей конструкцией со смартфона. В этом случае в манифест приложения необходимо добавить следующие строчки для разрешения коммуникации по Bluetooth:
<DeviceCapability Name="bluetooth.rfcomm">
<Device Id="any">
<Function Type="name:serialPort"/>
</Device>
</DeviceCapability>
Мы не будем сейчас рассматривать использование bluetooth – это тема для отдельной статьи. Однако заметим, что с точки зрения программирования разницы почти нет – надо использовать объект BluetoothSerial вместо UsbSerial, а все остальные конструкции остаются без изменений.
Где взять исходный код
Исходный код моего проекта по традиции доступен на GitHub: https://github.com/evangelism/RemoteArduinoLamp/tree/v1.0-serial. Пожалуйста, берите его, экспериментируйте, если найдете ошибки – делайте pull requests.
Выводы
Windows Remote Arduino – достаточно молодая и сырая технология, но уже сейчас она может упростить решения ряда задач, в которых необходимо напрямую управлять входами/выходами платы Arduino, подключенной к компьютеру. Конечно, всё тоже самое можно запрограммировать вручную, написав свой скетч и используя последовательный канал для взаимодействия с ним, но почему бы не использовать уже готовые наработки и сложившиеся стандарты (Firmata), чтобы не изобретать велосипеды.
Я надеюсь, вы будете использовать Windows Remote Arduino в своих проектах, и если вы сделаете что-то интересное – мне будет приятно об этом узнать! Пишите в комментариях, в твиттере или вконтакте!
BOBS13
Может мой вопрос дурацкий, можно ли будет подключить Windows Remote Arduino к не универсальному приложению, допустим к веб серверу на ASP.Nt?
shwars Автор
Хм, вопрос интересный! В смысле, что Arduino будет физически подключена к такому серверу? Думаю, что такой сценарий изначально не рассматривался, но учитывая открытость исходного кода можно будет ре-использовать какой-то процент кода чтобы его реализовать. Но думаю правильнее все-таки в этом случае использовать что-то типа SignalR или Azure Queue, а для управления Arduino использовать связку, например, с Raspberry Pi.
BOBS13
Конечно, такой поход не есть хороший вариант, но просто с использованием через Raspberry Pi есть свои порблемы. Если хочется запустить маленький веб сервер на нем использовать .NET будет проблематично если даже установить Windows 10 IOT Core она (судя по всем описаниям) не сможет поднять такой сервер и придется возвращаться к связки через Linux
shwars Автор
Идеальный вариант — поднять веб-сервер в облаке, а данные с RPi отправлять туда. Или если нужно в обе стороны — использовать SignalR.