

В данном решении нет скелетной структуры, рука выполнена из мягких и гибких материалов, фаланги пальцев выполнены из трехмерной текстильной ткани с тактильными сенсорами и гибкими проводниками, которые могут сгибаться помощью пневматических модулей. В запястье руки установлен узел с клапанами, которые приводят в движение элементы руки при необходимости мелко моторных движений.
Движениями BionicSoftHand управляет искусственный интеллект, способный обучаться методом проб и ошибок, а после адаптации к задаче быстро и автономно выполнять необходимые действия с предметами, по аналогии как это делает человек

Ссылка на описание от производителя решения BionicSoftHand тут.

Роботизированная рука BionicSoftHand оснащена:
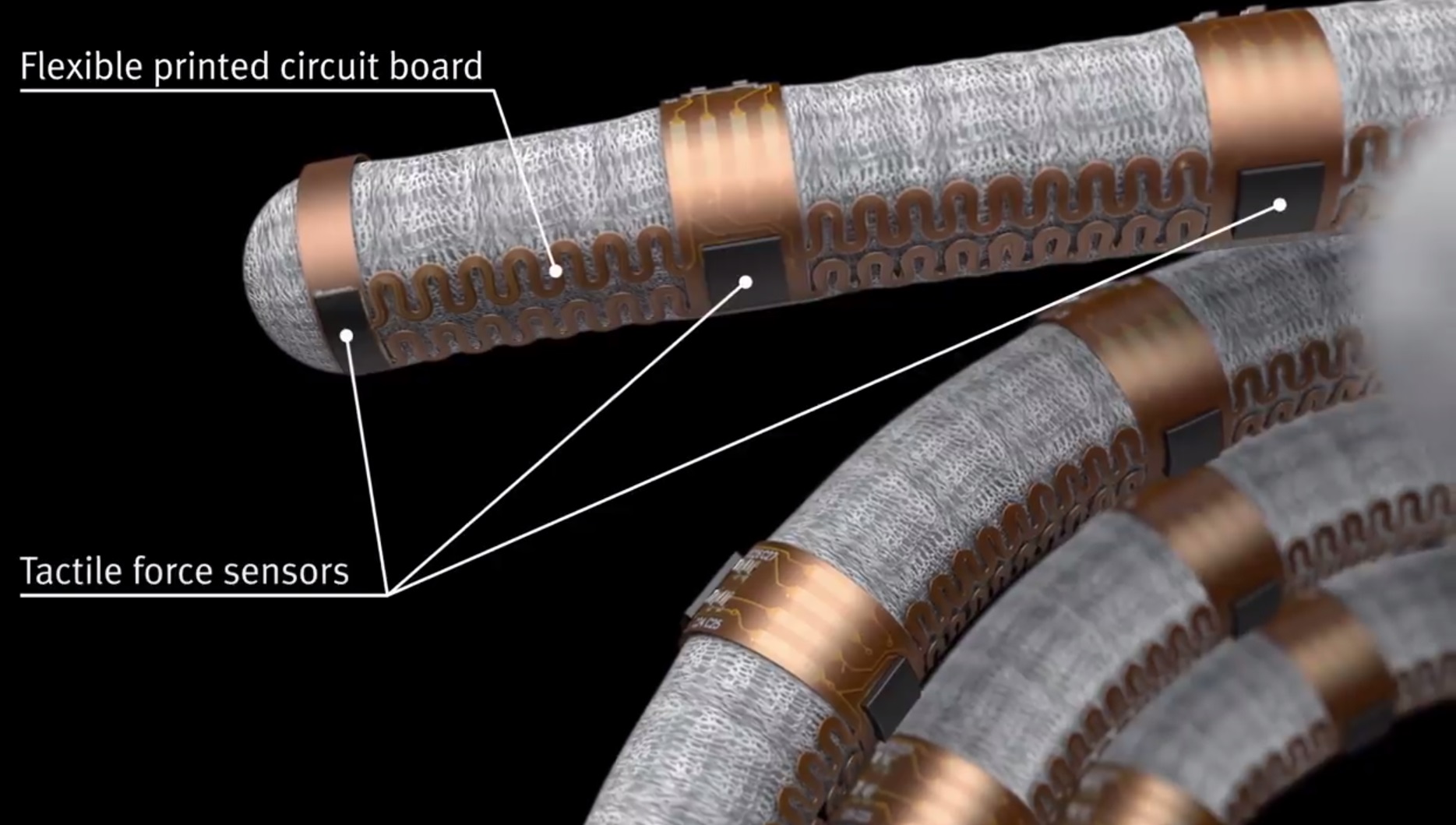
— надувными сильфонами, вокруг которых располагается созданная с помощью технологии 3D-печати трехмерная ткань из эластичных волокон, которая изгибается вместе с движениями руки, когда в сильфоны подается воздух, по аналогии с работой мышц и сухожилий;
— пневматическими поворотными модулями;
— пневмоостровом на 24 пьезо клапана;
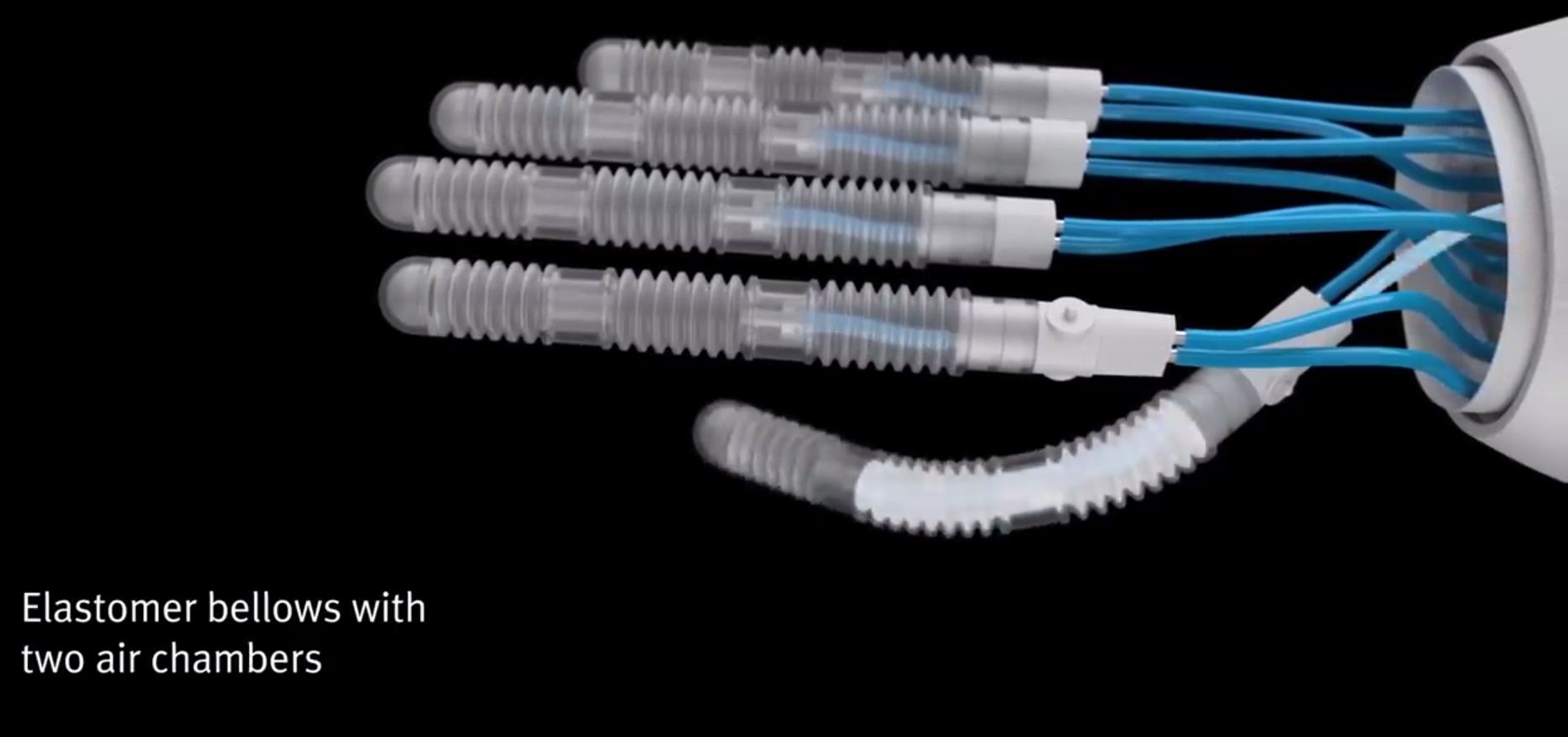
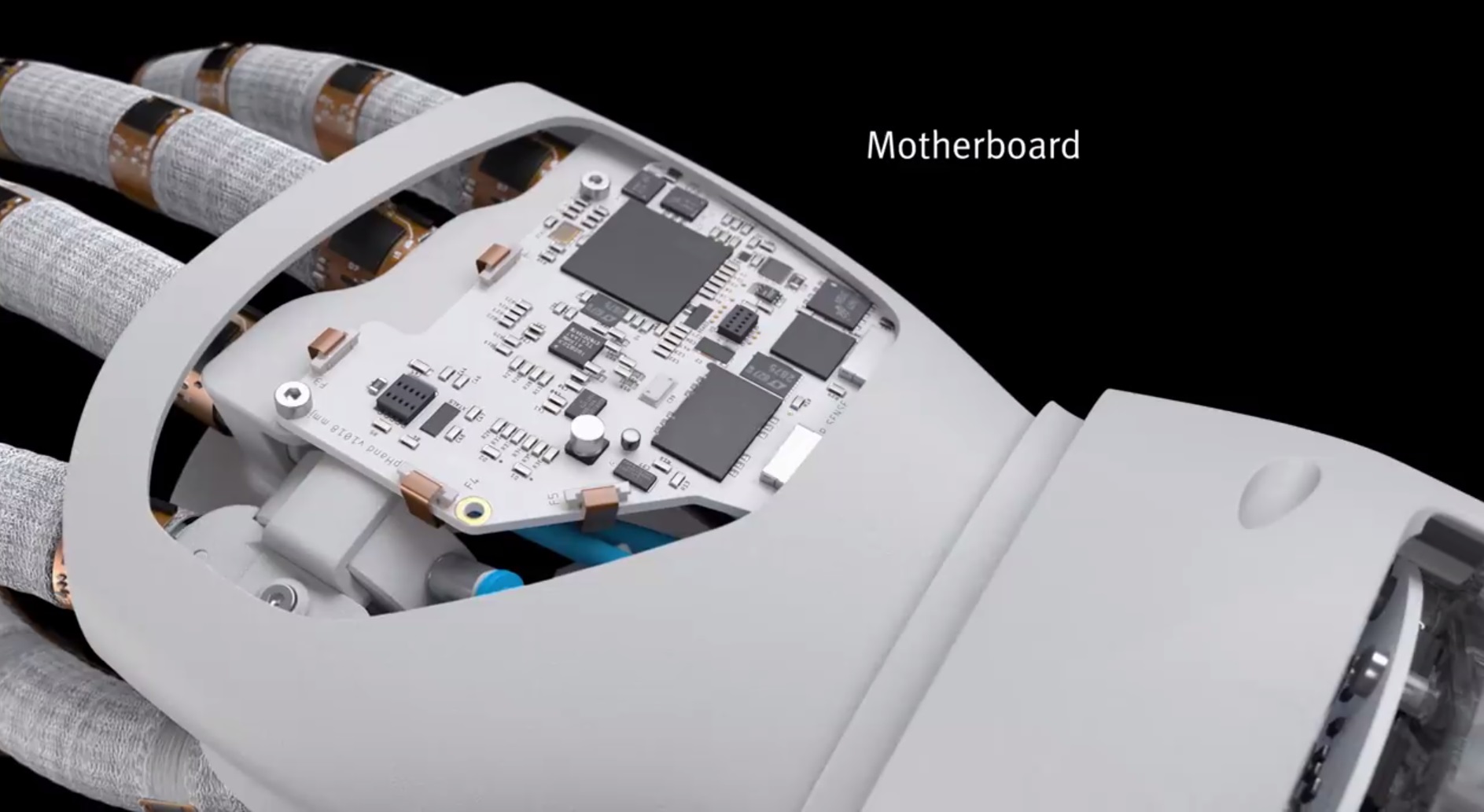
— бортовой материнской платой, в том числе для автономного управления движениями;
— датчиками инерции (движения) и силы (установлены в мягких пальцах), которые также созданные на базе гибких материалов и способны изгибаться в момент движения;
— самообучающимся модулем ИИ, способным самостоятельно просчитывать оптимальный способ взаимодействия руки с разными предметами и совершения разных действий, причем в кратчайшие сроки, получающим данные так же от 3D-камер с восприятием глубины для анализа предметов и движений.
Технические характеристики компонентов устройства:
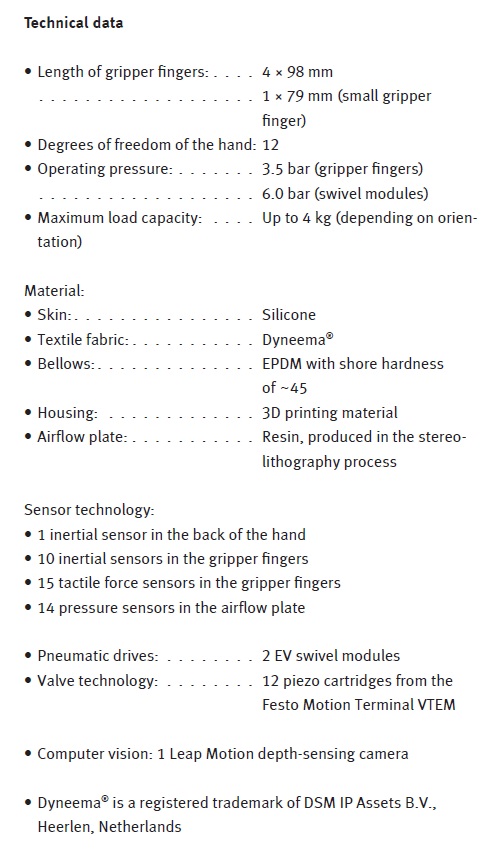







Массив сенсорных датчиков на пальцах руки обеспечивает обратную связь с системами управления рукой (с компонентами ИИ), сообщая о совершаемых движениях самой руки и пальцев, а также о способах и движениях при контакте с разными объектами, так же ИИ анализирует информацию о том, правильно ли расположен объект в руке для его манипуляции, используя матрицу контактного восприятия, имитирующую чувство осязания человека. Далее ИИ просчитывает какие усилия нужно приложить для удержания предмета, какая должна быть выполнена двигательная последовательность для положений и перемещений пальцев, насколько широко нужно раскрыть ладонь и так далее.

Первоначально рука BionicSoftHand не запрограммирована на какие-то конкретные движения, а подключённый к ее плате управления ИИ обучается в процессе выполнения тестовых задач с помощью использования технологии параллельного обучения, создавая в виртуальной среде, со временем позволяя роботизированной руке становится только «умнее», а для решения новых задач использовать уже ранее изученные и верифицированные при реальных действиях комбинации движений, которые далее оптимизируются под новые задачи.

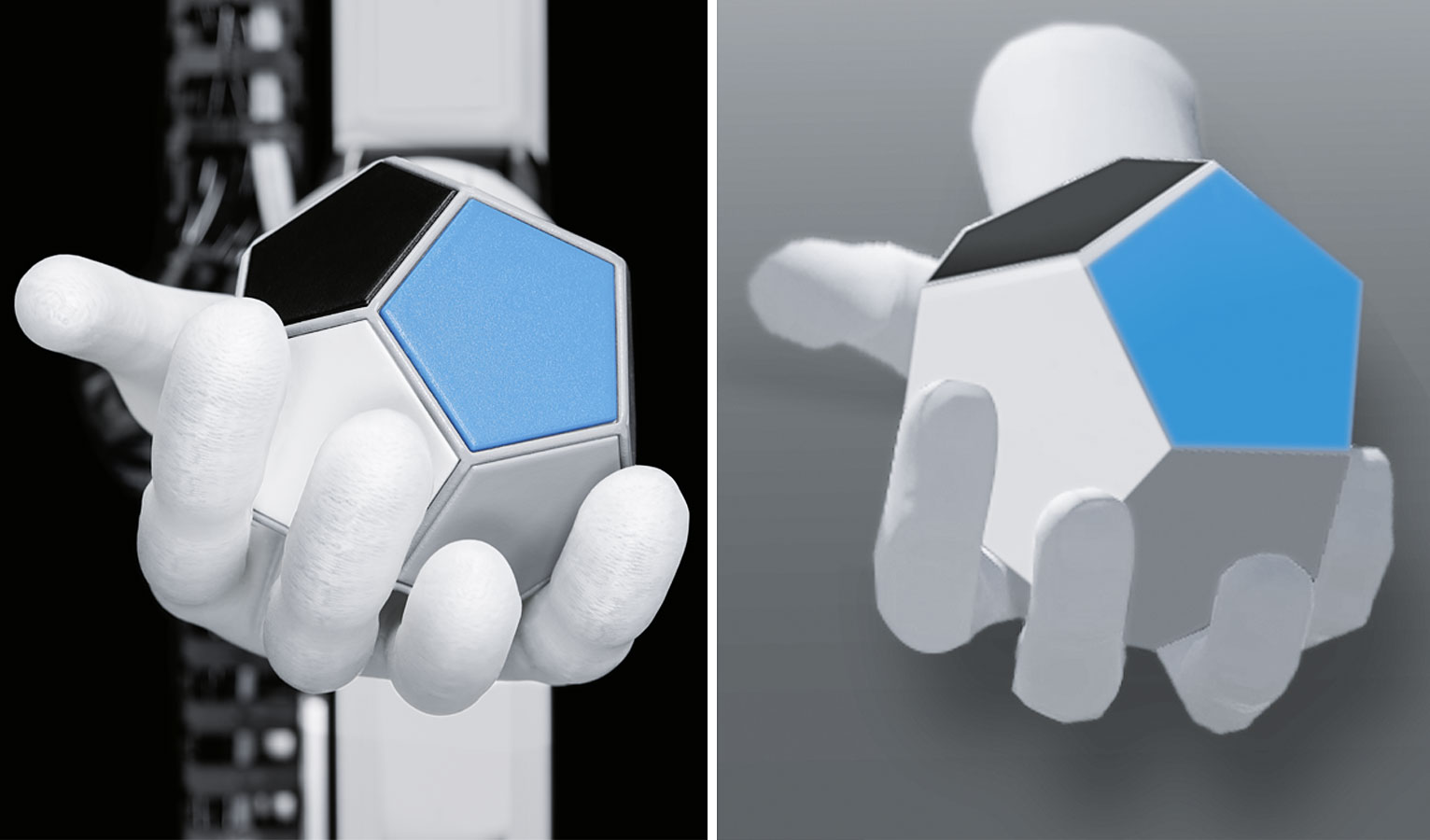
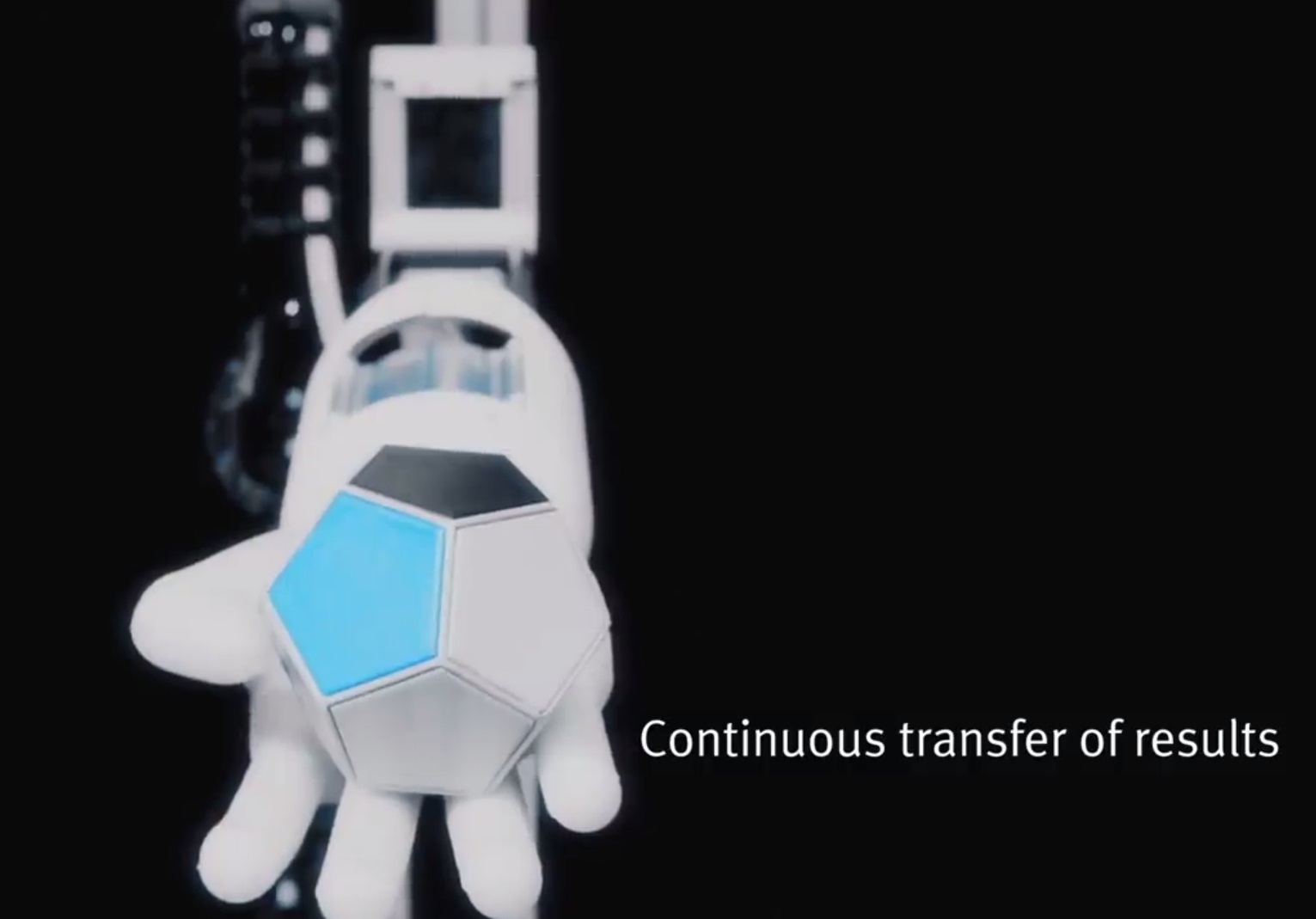

В демонстрационном видео ниже ИИ с роботизированной рукой дали задачу переместить помещенный в руку 12-гранный объект таким образом, чтобы определенная грань смотрела вверх, без объяснения действий по выполнения этой задачи.
Сперва, с помощью 3D-камеры с восприятием глубины, ИИ создает цифровую копию объекта, а затем помещает ее в виртуальную симуляцию со множеством виртуальных рук, которые манипулируют объектом до тех пор, пока не будет подобрана правильная комбинация.
Затем ИИ просчитывает варианты, чтобы найти и выполнить быстро оптимальные действия с предметом, а потом выполняет их в реальности, управляя элементами BionicSoftHand.
Компоненты для создания Электроника Евгения Велтистова все ближе и ближе к реальности.
Комментарии (16)

ProLimit
18.03.2019 14:37Круто, прям придраться не кчему — все правильно спроектировали. Единственное, пневматика медленная и не сильно точная. Ближе к оригиналу были бы тяги и суставы. Электромоторы сейчас компактные и мощные, позволят собрать все 24 тяги в запястье.
kirillskiy
18.03.2019 17:17+1Вы можете привести пример таких моторов? Насколько я знаю, ни у кого пока не получилось сделать кисть наподобие человеческой по функционалу и массогабаритам. Самое близкое — John Hopkins MPL.
ProLimit
18.03.2019 17:32Именно повторить кисть без искуственной мышцы невозможно, а пока таких не изобрели, насколько я знаю. Я же имел ввиду моторы, которые по габаритам будут примерно как блок «24 piezo valves» с тросиками вместо трубок. Такая конструкция наиболее популярна, и на мой взгляд точнее пневматики.
alexk24
19.03.2019 06:16Клапаны вероятно получаются компактней моторов. Собственно плюс пневматики в том что можно поставить один мощный насос и от него питать множество исполнительных механизмов.
ProLimit
18.03.2019 17:37+1вот пример: www.youtube.com/watch?v=x6u_5-rbU1g
GokenTanmay
19.03.2019 16:38«Тяги» на пальцы человеческой руки идут почти от локтя, т.е. за сгиб 5 пальцев отвечает объем почти всего предплечья. Разместить в таком объеме сервы для каждого пальца «протеза» вполне реально.
nafnaf21
19.03.2019 05:27придраться всегда есть к чему, как я понял усилие пневмы реализовано только на сжатие, расжатие определено свойствами материала из которого изготовлена рука, эти движения с усилием не часто требуется, но всё же.
wilderwind
19.03.2019 14:02Если подумать и сравнить, то современный смартфон или топовый ПК с жидкостным озлаждением не сильно проще такой руки (по технологиям), а стоят вполне приемлемо. Весь вопрос в массовости производства. Штучные изделия и прототипы всегда были дорогими.
Эх, если бы люди вкладывали деньги не в вооружения, а в развитие технологий, науки и медицины — давно бы уже бегали на робоногах и видели киберглазами…

BandGsharp0
20.03.2019 18:31Прекрасная рука, скорее похожа на руку из Звездных войн, если бы не ИИ.
Есть несколько вопросов:
— рука сделана из эластичной текстильной ткани и мягких материалов, то есть будет подаердена разрушению температурой (тепло/холодно). Плюс на местах сниба будут разрывы, со временем. Не лучше ли было сделать сшивки на каждую фалангу, и на местах со сгибом?
— скорость реакции ИИ с такими руками будет отличной от человеческой. Это скорее неудобство, чем большая проблема, если вы, например, захохотите пожать ИИ руку
Baigildin
Похоже что он будет стоить как крыло самолета.