
Размещённые вакансии от подрядчика НАСА говорят о том, что начата разработка нового гуманоидного робота

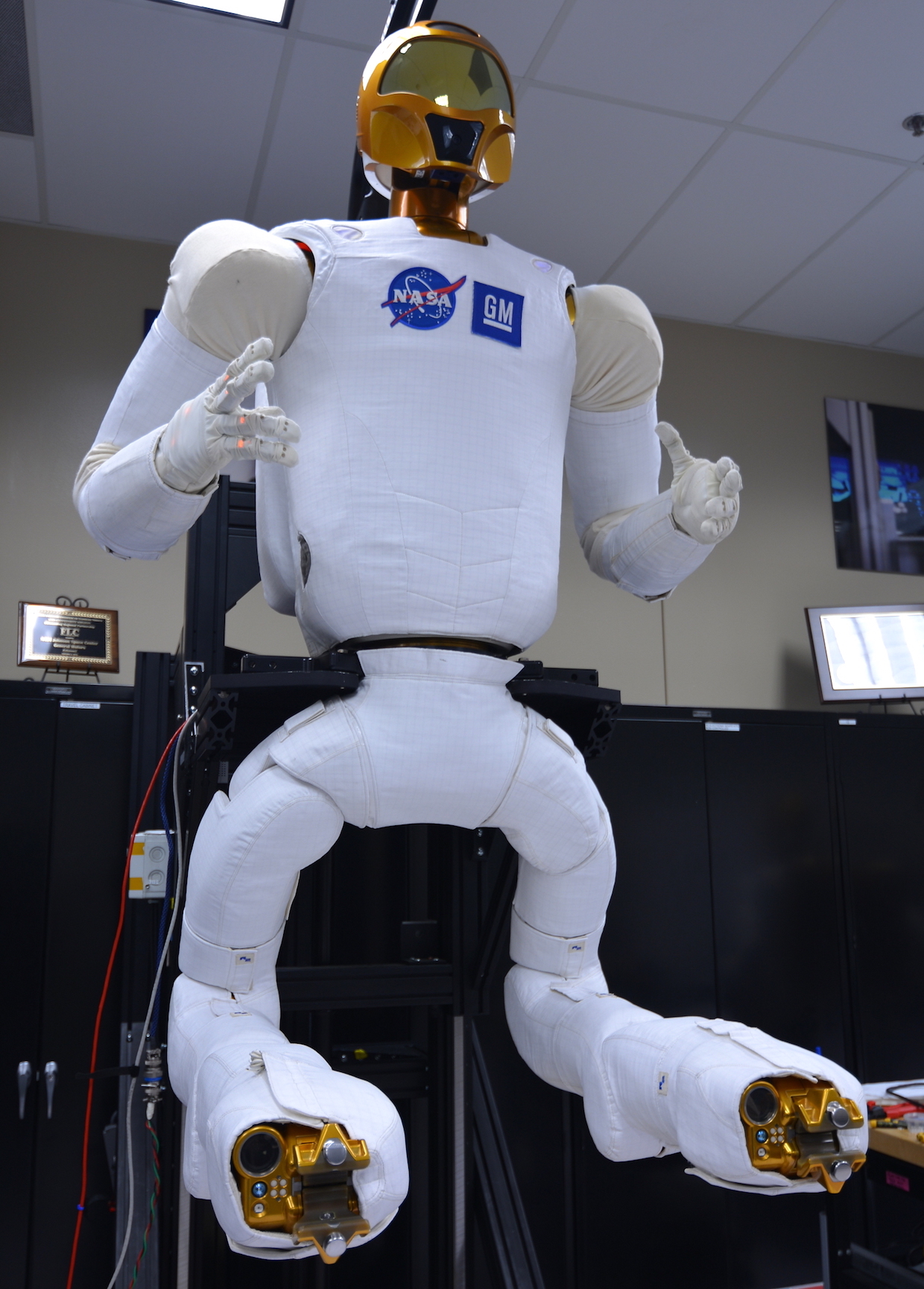
Прошло уже почти шесть лет с тех пор, как НАСА продемонстрировало «Валькирию», передового гуманоидного робота размером с человека. По окончанию соревнования DARPA Robotics Challenge НАСА продолжило работать над «Валькирией» в космическом центре имени Линдона Джонсона, а также обеспечило копиями роботов несколько университетов. И хотя эта платформа уже не считается новой (в робототехнике шесть лет – это приличный срок), «Валькирия» всё ещё способна на многое, и сохраняет большой потенциал для исследований в области робототехники.
Учитывая всё это, мы удивились, увидев, что инженерная компания Jacobs из Далласа, оказывающая технические услуги широкого спектра всем желающим, опубликовала несколько вакансий на должность робототехника в Хьюстоне, Техас, для людей, которым было бы интересно работать вместе с НАСА над «следующим поколением гуманоидных роботов».
Вот выдержка из одной из вакансий:
- Работать непосредственно в космическом центре имени Линдона Джонсона для разработки следующего поколения гуманоидных роботов.
- Присоединиться к команде, создавшей робота «Валькирия» в технологическом отделе робототехники НАСА.
- Основываясь на успехах созданных гуманоидных роботов «Валькирия» и "Робонавт-2", расширять возможности НАСА по внесению человеческого присутствия и возможностей работы с объектами в сложные, опасные и удалённые окружения, как в космосе, так и на Земле.
Вопрос состоит в том, почему НАСА опять берётся за разработку гуманоидного робота, вместо того, чтобы сэкономить кучу времени и денег, используя уже существующую платформу – Atlas, Digit, «Валькирия», другие более или менее доступные гуманоидные роботы? Единственный ответ, который приходит в голову мне – ни одна из существующих платформ не удовлетворяет требованиям НАСА, какими бы они ни были. И если так, о каких требованиях идёт речь? Очевидным требованием была бы способность работать в окружениях, на которых НАСА специализируется – космос, Луна и Марс.

Гуманоидный робот «Валькирия» на Марсе в представлении художника
Существующие у НАСА гуманоидные роботы, включая «Робонавт-2» и «Валькирия», были разработаны для работы на Земле. В итоге «Робонавт-2» всё равно отправился в космос (его недавно вернули на Землю для починки), однако его оборудование определённо не предназначалось для работы вне МКС. Для работы в вакууме приходится учитывать гораздо более строгие требования окружающей среды, а на Луне или Марсе ситуация становится ещё хуже – там всюду проникает абразивная пыль.
Мы знаем, что можно разрабатывать роботов для работы в такого рода окружениях, потому что нам это уже удавалось. Но если вы не собираетесь отправлять робота за пределы планеты, нет смысла обеспечивать его работоспособность, допустим, в условиях 300-градусных перепадов температур, какие случаются на Луне. В прошлом НАСА концентрировалось на проектировании роботов, которые в будущем можно было использовать в качестве платформ для разработки ПО и технологий, которые однажды можно будет применить для работы вне планеты. Агентство не занималось излишними инженерными изысканиями в проектах конкретных роботов для того, чтобы они могли функционировать в таких условиях, в которые, скорее всего, не попадут. Но, поскольку НАСА всё сильнее склоняется к возвращению на Луну, возможно, настало время задуматься о создании гуманоидного робота, который мог бы делать что-нибудь полезное на лунной поверхности.
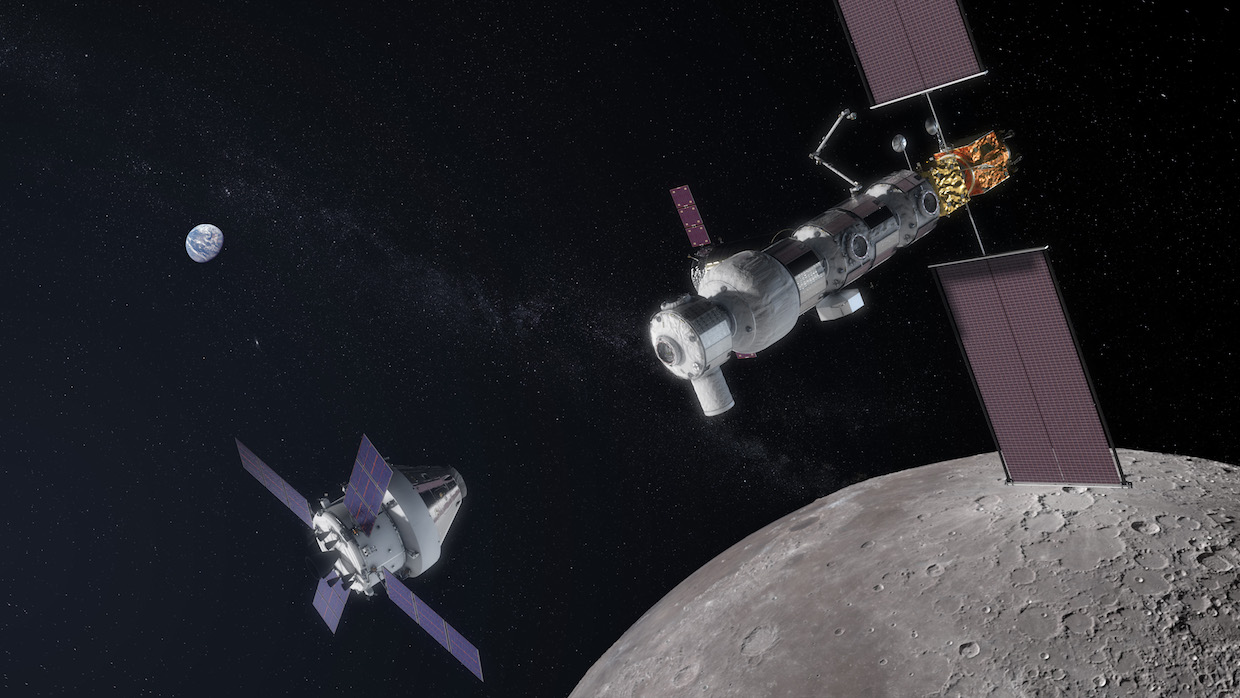
Орбитальная лунная станция «Шлюз» (справа) и приближающийся к ней спускаемый аппарат «Орион» в представлении художника
Другая возможность, приходящая мне в голову, и, возможно, более вероятная – что этот новый гуманоидный робот будет прямым потомком «Робонавта-2», предназначенного для работы на орбитальной лунной станции «Шлюз». Некоторые из робототехников НАСА, с которыми мы беседовали в последнее время, подчёркивали, насколько важной будет робототехника для работы «Шлюза»:
Трей Смит, Исследовательский центр Эймса: в НАСА все предвкушают работу над космической станцией «Шлюз», которая будет располагаться на орбите вокруг Луны. У нас пока нет точных планов того, что будет происходить на станции «Шлюз», однако в общем все согласны с тем, что роботы для работы внутри космических станций очень важны. Поэтому неудивительно будет увидеть на «Шлюзе» мобильный манипулятор типа «Робонавта» или свободно перемещающегося робота вроде Astrobee.
Если к «Шлюзу» пристыкуется беспилотный грузовой корабль, до потолка набитый грузом, а в «Шлюзе» в этот момент не будет команды, будет очень полезно иметь на станции робота, который сможет принять весь этот груз, распаковать его, убрать все вещи, и потом ещё осуществить расстыковку грузового корабля до того, как прибудет команда, чтобы членам команды не пришлось тратить на это своё время.
Джулия Баджер, НАСА, JSC: Одной из систем, присутствующих на станции «Шлюз», будут станционные роботы. Они не обязательно будут похожи на «Робонавта», однако их функциональности будут схожими – они будут мобильными, будут способны переносить грузы между разными модулями, осуществлять сложные манипуляции с объектами, инспектировать внутренности панелей, и подобные вещи.

Гуманоидный робот «Валькирия» работает на станции «Шлюз» (представление художника)
Поскольку на станции «Шлюз» люди будут не всегда, очень важно будет обеспечить постоянное роботизированное присутствие, чтобы на станции всё работало, когда никого нет дома, и при этом экономить ресурсы на том основании, что роботы не едят, не пьют, не потребляют кислород, не требуют особенно высокой температуры и не выделяют всяких противных отходов. Робот, очевидно, будет не настолько способным, как человек, но если он сможет решать хотя бы основные задачи по обслуживанию станции (скорее всего, благодаря хотя бы частичному удалённому управлению), он будет весьма полезен там.
Команда «Робонавта» из НАСА планирует выполнение различных экспериментов по мобильности и планированию движений с использованием новых ног робота, которыми он может хвататься за поручни на МКС
Вопрос того, попадут ли роботы, разрабатываемые для «Шлюза», в категорию «гуманоидных», связан с тем, что «Шлюз» разрабатывается для людей, поэтому эффективной роботизированной системе придётся взаимодействовать со станцией примерно так, как это делал бы человек. Поэтому стоит ожидать роботов с руками, рабочие органы на концах которых смогут хватать объекты и нажимать на кнопки, а также некими системами для передвижений – вероятным прототипом кажется версия «Робонавта-2» с ногами, однако его придётся переработать так, чтобы он смог работать в космосе; а для этого нужно будет использовать все прорывы в оборудовании для робототехники и в вычислительной технике, произошедшие за последние десять лет.
Команда журнала Spectrum IEEE уже некоторое время докучает НАСА с вопросами об этом проекте, но представители агентства пока не готовы комментировать ситуацию или даже подтверждать существование этого проекта. Всё в данной статье является лишь нашими домыслами (кроме самой вакансии, которую вам, возможно, стоит рассмотреть), и мы можем оказаться неправы по всем пунктам. Как только мы узнаем больше, мы обязательно дадим вам знать.
trofimovep
Вряд ли этим можно кого-то "впечатлить", есть же Фёдор
slovak
Пришел, чтобы увидеть этот комментарий Ж)
trofimovep
даже карма убавилась… и так невелика была)
DesertFlow
Строго говоря, результат в итоге может оказаться таким же бесполезным, как от Федора. Просто от NASA традиционно лучшие ожидания. Что может что-то получиться полезное. С Федором изначально было ясно, что это просто на орбиту и обратно свозили 160 кг железа за счёт налогоплательщиков. Подтверждением чему было, когда в эфире во время демонстрации как робот Федор умеет обращаться с мелкими инструментами своей человекообразной рукой, если присмотреться, то можно было заметить, что отвёртка примотана к руке изолентой. Даже не напрягаются, чтобы не палиться.
slovak
>> Даже не напрягаются
А что инженерам напрягаться то? Вышестоящий дядя, в форме, привыкший к бездумным выполнениям его приказов, поставил нереальную задачу в нереальные сроки. Также, вероятно, понадеялся, что позор общественной огласки ускорит процесс разработки.
Но метод методу рознь.
Одна из причин упадка рабовладельческого строя была в трудности заставить раба делать что-то чуть более сложное нежели «камни тесать и капусту садить». Мотивация не того рода. Из-под палки сложные вещи не разрабатываются.
Valerij56
И никто не стремился притащить в космос опоры для 160 кг Робонавта, и никто, почему-то, не пытался показать, как Робонавт ползает или стреляет по македонски.
ProtoFaust
давно пора было сделать
NotThatEasy
Если не секрет, почему такой интерес в гуманоидном роботе?
pda0
Ну это как бы очевидно. Чтобы мог работать в местах, рассчитанных на людей, с предметами, рассчитанными на людей, инструментами, предназначенными для людей. Ну и главное, чтобы при удалённом подключении оператор испытывал минимальный дискомфорт, управляя фигурой у которой такая же голова и две руки, а не набор щупалец.
Gurturok
Wikipedia говрит, что Федор по английски будет: Theodore, Theo, Ted, Teddy. Хорошо хоть не Томми.
solariserj
Да оно уже стало нарицательным
saag
На планете все же колесо лучше, во всяком случае прямоходящий там будет, ну в общем если так хочется конечностей то лучше присмотреться к паукам или скорпионам, последний готовая машина с манипуляторами.
Zmiy666
Тут просто возникает еще один извечный вопрос, в плане того, что лучше — разработать помещение и его начинку под робота, или разработать робота под человека, имитируя работу человека. Колесо хорошо для внешней среды, но вот в модуль заталкивать неудобно — проход узкий и прямоугольный, под человека. — делать ангар с пандусом? Гораздо дороже. Если взять скорпиона… то с ним те же проблемы — он низкий и широкий, тогда как человек — высокий и узкий. В помещения модуля, где на счет каждый квадратный сантиметр — такой робот сможет двигаться только по стенке и никак иначе, либо надо сильно его уменьшить, до размеров кошки, но тогда можно забыть о силовой поддержке — электроприводы робота пока что по эффективности сильно проигрывают мышцам, а гидравлика высокого давления в разы сложнее, дороже и требовательней к обслуживанию и условиям среды. В этом плане гуманоидный робот более универсален — он может сделать все то же самое что и человек и пролезть там, куда и человек пролезет. Но все это применимо, только если модуль будет сделан для людей… если он изначально будет делаться под роботов, то тогда да — там простор фантазии компоновки куда шире и роботы могут быть самых необычных форм. На той же луне — людям вообще не место — связь все еще позволяет управлять роботами удаленно, а условия для постоянного проживания человека — ужасны, не говоря уже о стоимости доставки живых людей на луну и их вывозе обратно.
saag
Ну что же, ровер на Луну возили и его просто разместили снаружи Лэндера, долетел и работал, если нужен ремонт робота, то он будет блочным, проще отсоединить мотор-колесо со встроенным контроллером, нежели тащить внутрь всего робота, то же самое и с приборами, робот должен быть быстроразборным и модульным. Насчет ужасности условий во внеземелье для людей — так оно и есть — ужасны, роботами на расстоянии поуправлять можно, но вот результат как обычно получится не такой объемный, если взять Марс или астероиды для примера, это если касаться не фотокартирования, а реальной работы на поверхности, все будет медленно, а вон астронавты сели на ровер, намотали километров 30, разведали куда большую территорию, получили больше информации за короткий срок. Конечно сложностей больше, когда летит человек, но при это решается и больше задач, решение которых находит применение не только в космонавтике, опасно, да, многие профессии опасны, но думаю это не должно быть тормозом. Зачем человеку лететь? Ну во первых человек существо любопытное, познание окружающего мира и есть цель его жизни, во вторых сделать больше за короткий срок, роботы ему в помощь, выкопать котлован под базу, управляя на месте лунным эскаватором на месте человек сумеет быстрее, чем если это делать дистанционно. Такой пример один луноходов прекратил свою работу потому что лунная пыль засыпала ему солнечную батарею, это даже не поломка, а вот поди же некому было расчистить солнечную батарею и продолжить работу.
DesertFlow
С одной стороны, гуманоидный робот нужен только для одной цели — управления им как аватаром. И то достаточно только торса с руками. Многорукие и многоногие роботы в виде пауков намного лучше, но только если у них есть свой интеллект. Чего в ближайшие годы явно не предвидится.
Здесь можно возразить, что в невесомости даже для телеметрии было бы лучше иметь торс с четырьмя руками — оператор может просто переключаться между ними. Двумя руками держаться за поручни, например, а ещё двумя делать работу. Однако двурукого гуманоидный робота можно рассматривать как минимальную версию в этой концепции.
Так что из этого заказа НАСА на разработку именно гуманоидного робота можно сделать два вывода: 1) они не ожидают появления достаточно сильного ИИ в ближайшие годы, который смог бы управлять роботом-пауком, 2) задача стоит сделать минимальную рабочую версию, поэтому только две руки.
Vsevo10d
И в ближайшие годы будут высаживаться только на Луну, потому что осваивать Марс роботом -аватаром бессмысленно из-за времени прохождения сигнала.
fruit_cake
почитайте что ли уже про квантовую телепортацию, китайцы вон на свою космическую станцию смогли перенести запутанные частицы и осуществить передачу данных мгновенно
Valerij56
И где это пишут?
Quiensabe
почитайте что ли уже про квантовую телепортацию, она не позволяет передавать данные быстрее скорости света (по крайней мере сейчас).
DesertFlow
Квантовая телепортация позволяет только защитить линию от взлома, так как любая попытка прочитать квантовое состояние изменяет данные. Сигнал там передается обычным способом, со скоростью света. Точнее, вообще параллельным потоком по обычным каналам. Квантовая телепортация используется потом только для расшифровки и проверки, что никто в канал не влез и не подслушал. Так что на Марсе с двадцатиминутной задержкой смогут действовать только автономные роботы.
fruit_cake
да, я перепутал, но китайцы запустили запутанные частицы в космос и осуществили изменение состояния в 2017 году
Everm
Прям передачу данных без классического канала связи? Хотелось бы почитать подробнее.
potan
Можно управлять нескольким операторам. Один своими руками выбирает, как лучше держаться, второй своими — орудует инструментами.
Valerij56
DesertFlow
Ну да, речь о полной автономности нескольких паукообразных конечностей. И ног, и рук. В невесомости нужны три опоры (ноги) для фиксации и два манипулятора (руки) для работы. Не очень похоже на гуманоида. Нет, можно конечно одной рукой держаться за поручень и фиксировать себя этим по всем направлениям. Но там нагрузка на сустав огромная. Три разнесенные опоры лучше.
С другой стороны, может в невесомости нагрузки никакие? С инерцией можно бороться медленностью движений. Но подозреваю, что грубая физическая сила в космосе тоже нужна. Чтобы прижать дрель когда сверлишь обшивку, например.
Valerij56
Подпись к одной из картинок:
Было бы более естественно написать «космический корабль», так как «спускаемый аппарат» у Ориона отсутствует, вместо него командный модуль, который отделяется от служебного модуля в процессе посадки на Землю. Кроме того, создаётся ложная аналогия с лунным лендером.