

Одна из самых труднорешаемых задач в системах автоматизированного проектирования – скругления при моделировании объектов сложных форм. За построение скруглений, как и за всю геометрию в САПР, отвечает геометрическое ядро.
С точки зрения разработчика ядра охватить все варианты скруглений невозможно ввиду их бесконечного разнообразия. Наши математики постоянно добавляют в ядро C3D новые частные случаи, а недавно сделали скругление трех граней (или полное скругление).
В чем его сложность и как работает алгоритм, рассказывает Анна Ладилова, математик-программист C3D Labs.
Что такое «полное скругление»
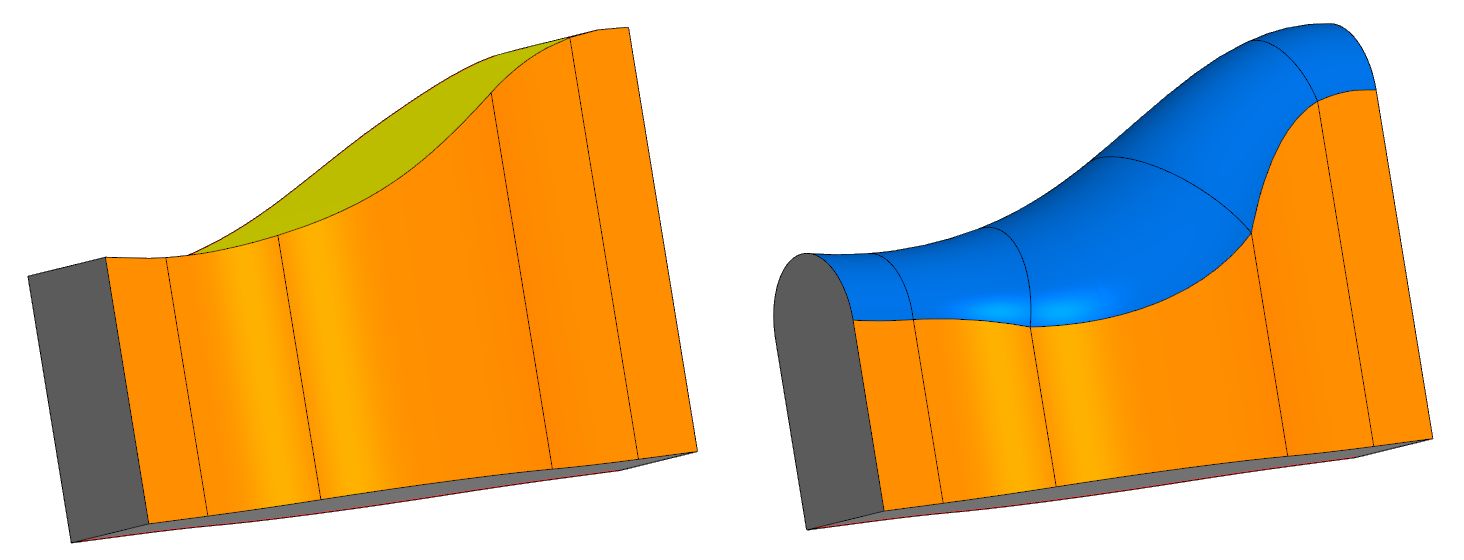
Допустим, у нас есть тело с тремя цепочками граней – центральной (верхней) и боковыми (правой и левой). Требуется заменить центральную грань поверхностью скругления, которая бы гладко стыковалась с соседними боковыми гранями. Эта новая поверхность и будет полным скруглением. В общем случае она имеет переменный радиус, определяемый автоматически.
Во многих известных CAD-системах операция полного скругления (full-round fillet) реализована, но ее математика не раскрывается.
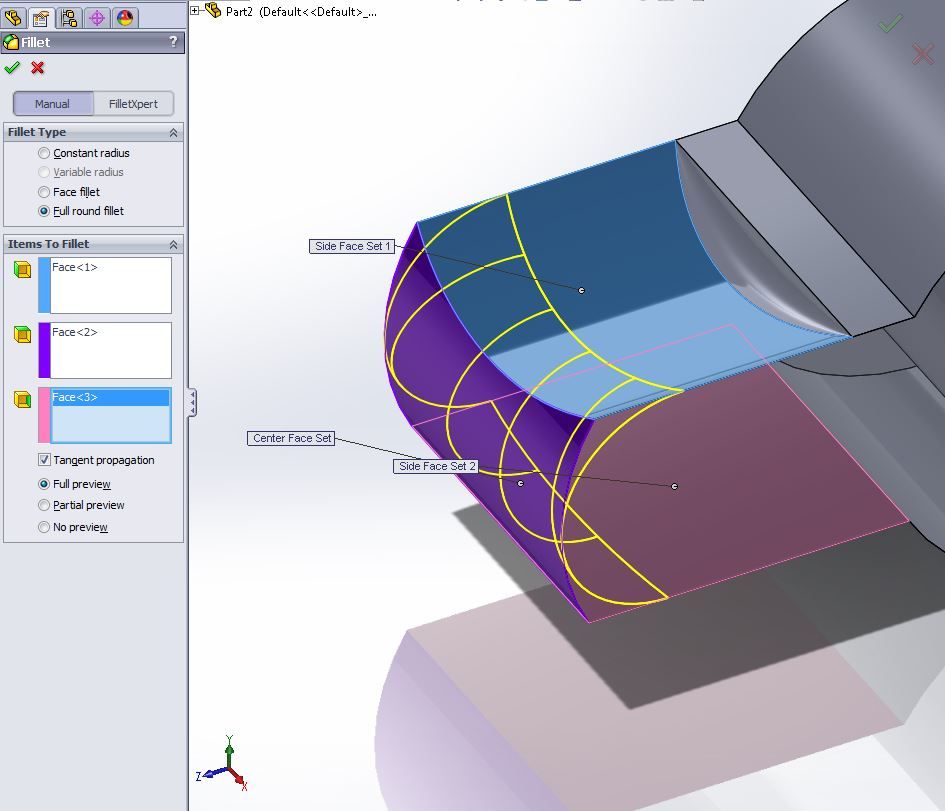
Операция Full round fillet в Solidworks
Поэтому мы разработали собственный алгоритм. И он отличается от алгоритмов других разработчиков.
Операции, хотя и называются одинаково, но приводят к немного разным результатам. Это говорит о том, что в SolidWorks скруглению трех граней дается другое определение.
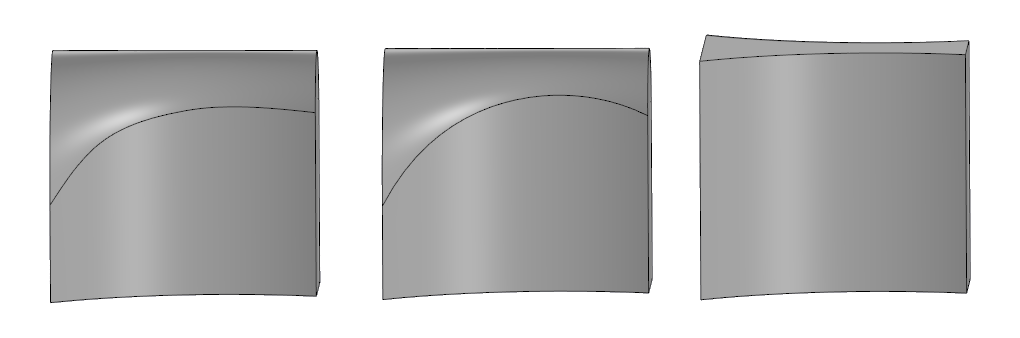
Справа — исходная модель, в центре полное скругление в SolidWorks, слева — в C3D.
Алгоритм построения полного скругления
Задача построения любого вида скруглений включает в себя несколько этапов:
- Разбить заданную цепочку на элементарные составляющие (для скругления трех граней это ровно три грани: левая, правая и центральная).
- Последовательно упорядочить элементарные составляющие.
- Построить поверхность скругления для каждой элементарной составляющей.
- «Сшить» ребрами соседние поверхности скругления.
- Обработать торцевые участки цепочки скруглений, т. е. корректно соединить их с модифицируемым телом.
Ключевым моментом в этой процедуре является третий шаг: построить поверхность скругления для трех заданных граней.
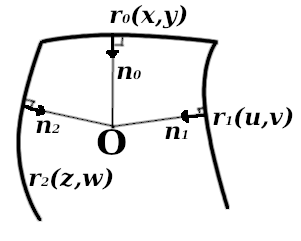
Для построения искомой поверхности первоначально необходимо определить кривые, по которым скругление касается каждой из трех граней. В общем случае эти кривые можно построить только как сплайны, проходящие через известные точки, которые рассчитаны заранее.
Рассмотрим, как можно вычислить тройку точек – по одной на каждом сплайне.
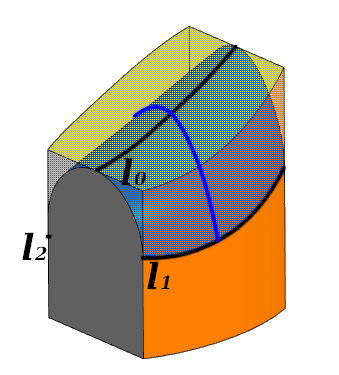
Обработка элементарной составляющей. Скругление касается каждой из трех граней по кривым l0; l1; l2. Синей линией изображено поперечное сечение
В каждом поперечном сечении :
- – рассчитывается автоматически
- ортогональны касательным плоскостям поверхностей в соответствующих точках
- 0 – точка привязки, лежит в плоскости .
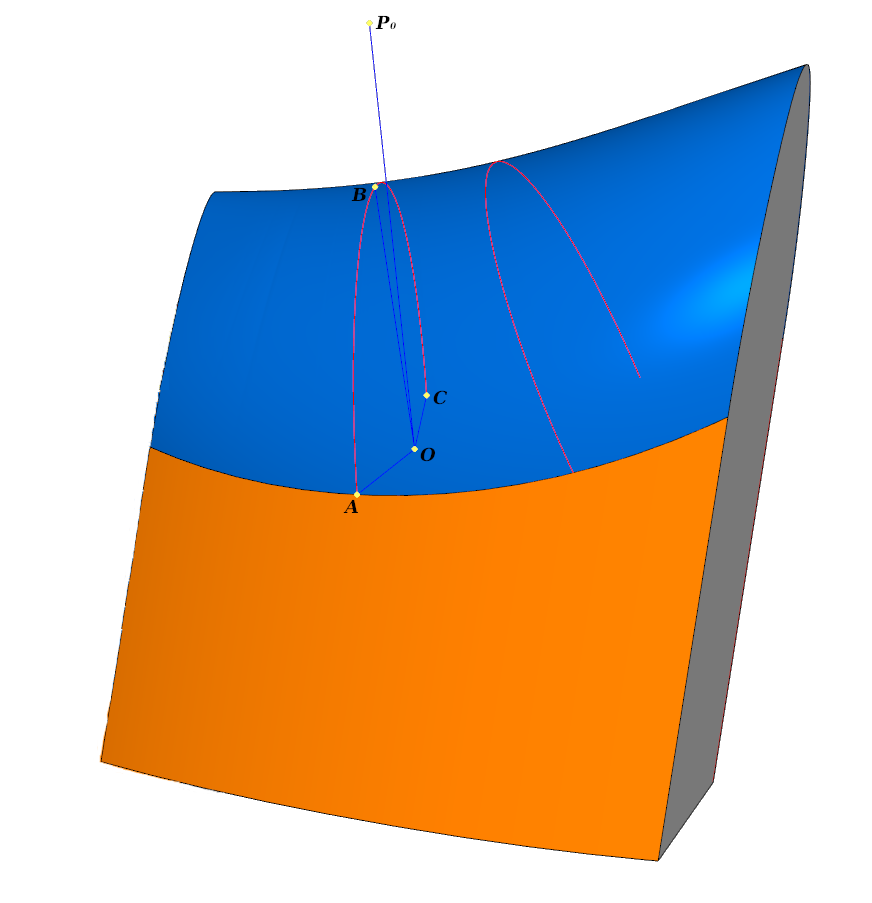
Определим исходные поверхности центральной, левой и правой граней радиус-векторами в некоторой области определения. Пусть боковые поверхности задаются радиус-векторами 1 и 2, а центральная – 0. Введем положительный числовой параметр .
Обозначим через 0, 1, 2 единичные нормали к соответствующим поверхностям, направленные «внутрь».
Поперечное «сечение» при построении скругления
Потребуем, чтобы концы этих нормалей, растянутых в раз, попали в одну точку – точку .
В терминах дифференциальной геометрии наши требования можно сформулировать системой из семи уравнений с семью параметрами:
0 = 1,
0 = 2,
(0 — 0, 1 — 0, 2 — 0) = ,
где
- — переменный радиус
- 0 — точка привязки
- — переменные из области определения параметров.
Используя алгоритмы численных методов (например, метод Ньютона), мы находим решение этой системы: 0, 0, 0, 0, 0, 0, 0.
Решение определяет точки касания с поверхностями:
- 0(0, 0),
- 1(0, 0),
- 2(0, 0),
а также радиус 0.
Пробегая некоторый набор точек 0, мы получаем наборы троек точек касания с поверхностями, по которым можно восстановить «кривые касания» 0, 1, 2 как сплайны Эрмита, проходящие через рассчитанные точки.
Область определения [min, max] у всех кривых одна и та же, причем параметру i соответствуют точки 0i, 1i, 2i. Далее по этим кривым производится расчет нужного сечения скругления.
Зафиксируем некоторый параметр и вычислим для него точки:
- 0
- 1
- 2.
Построим сплайновую кривую, проходящую через эти точки и ортогональную в них векторам нормали 0, 1, 2 соответственно.
Если слегка изменить постановку задачи и искать кривую по заданным точкам и касательным векторам в этих точках, то методы, которыми можно реализовать такой сплайн, можно найти, например, в книге Николая Голованова «Геометрическое моделирование».
В книге подробно описаны методы скругления ребра тела, в частности, показано, что поперечное сечение скругления может быть реализовано как NURBS-кривая, определенная тремя точками. В случае скругления трех граней аналогичная кривая будет определяться пятью точками.
Итак, для каждого параметра мы можем определить набор точек для построения NURBS, а следовательно, определить каждую точку поперечного сечения поверхности скругления. Таким образом, задача построения поверхности полностью решена.
В описании этой части алгоритма остался небольшой вопрос — как «правильно» выбрать набор точек 0, соответствующих поперечному сечению, по которым можно будет легко восстановить «кривые касания» 0, 1, 2?
Представляется разумным брать их с некоторой заранее выбранной кривой. В детали построения этой кривой мы вдаваться не будем, отметим только, что она должна быть гладкой, без самопересечений и «усреднять» цепочки ребер, ограничивающих слева и справа центральную грань.
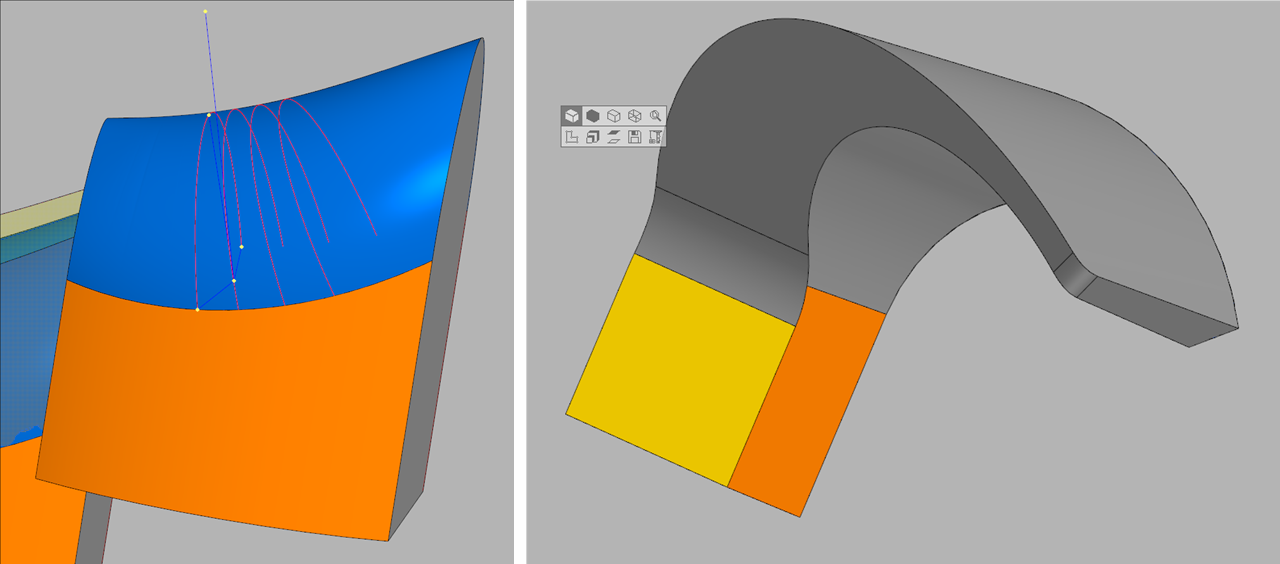
Слева поперечные сечения, зависящие от точки 0.
Справа фигуры могут быть достаточно сложными, поэтому правильно выбрать «вспомогательную» кривую — это отдельная задача.
Теперь, когда мы умеем строить поверхности скругления для простейших элементарных случаев, можно перейти к более сложной задаче: построить поверхность для цепочки граней.
Здесь основная проблема — «сшить» соседние поверхности гладким образом. Это четвертый шаг алгоритма.
Трудность заключается именно в гладкости сшивки, поскольку поверхности построены при разных начальных данных. Чтобы обеспечить гладкость, приходится прибегать к различным ухищрениям: менять направление и длину векторов производных в продольном направлении на некотором расстоянии от границы, менять значения производных весовых функций на границах и т.д. Результаты видны на рисунке: более гладкие линии «зебры» соответствуют более гладкой поверхности.


Вверху модель без алгоритма сглаживания. Внизу — после применения алгоритма.
Итог
В результате наших изысканий геометрическое ядро C3D умеет строить поперечное сечение скругления, опорные кривые, скругление трех граней; умеет сглаживать поверхность за счет выбора параметризации; частично умеет гладко стыковать соседние поверхности скругления.

Автор — Анна Ладилова, к.ф.-м.н., математик-программист C3D Labs
Комментарии (5)

Rikhmayer
08.11.2019 13:57После фразы
В терминах дифференциальной геометрии наши требования можно сформулировать системой из семи уравнений с семью параметрами
В третьем уравнении явно лишняя скобка. И там же все стало окончательно непонятно :)
Как там получается 7 уравнений (я правильно понимаю, все, что через запятую = О)? И какой смысл у точки привязки?
ladilova
09.11.2019 15:16+1В первом и втором уравнениях ni и ri — это векторы в пространстве.
Если задано уравнение x = a, где x=(x1,x2,x3) и a =(a1,a2,a3), то оно эквивалентно системе из трех линейных («обычных») уравнений:
x1=a1,
x2=a2,
x3=a3.
Таким образом, первые 2 строчки системы дают 6 уравнений, а последнее — седьмое.
В последнем уравнении слева — смешанное произведение трех векторов, которое приравнивается к 0.
ladilova
09.11.2019 15:41+1Последнее уравнение утверждает, что точка p0 лежит в плоскости, определенной точками r0(x,y), r1(u,v) и r2(z,w). Без этого условия (соответственно, без этого уравнения) система будет иметь бесконечное (однопараметрическое) семейство решений. Точка «привязки» p0 как раз выступает в роли параметра.
Newm
Нескромный вопрос… Есть ли что-то подобное для openscad?