
Содержание
- Что такое тензор и для чего он нужен?
- Векторные и тензорные операции. Ранги тензоров
- Криволинейные координаты
- Динамика точки в тензорном изложении
- Действия над тензорами и некоторые другие теоретические вопросы
- Кинематика свободного твердого тела. Природа угловой скорости
- Конечный поворот твердого тела. Свойства тензора поворота и способ его вычисления
- О свертках тензора Леви-Чивиты
- Вывод тензора угловой скорости через параметры конечного поворота. Применяем голову и Maxima
- Получаем вектор угловой скорости. Работаем над недочетами
- Ускорение точки тела при свободном движении. Угловое ускорение твердого тела
- Параметры Родрига-Гамильтона в кинематике твердого тела
- СКА Maxima в задачах преобразования тензорных выражений. Угловые скорость и ускорения в параметрах Родрига-Гамильтона
- Нестандартное введение в динамику твердого тела
- Движение несвободного твердого тела
- Свойства тензора инерции твердого тела
- Зарисовка о гайке Джанибекова
- Математическое моделирование эффекта Джанибекова
Введение
Прошлая статья должна была быть о численном моделировании эффекта Джанибекова, но мне внезапно пришла в голову мысль, что этот эффект можно исследовать качественно, пусть и довольно приближенным первым методом Ляпунова. Однако, численное моделирование тоже весьма интересный вопрос, тем более лежащий в плоскости моих исследовательских задач. Поэтому, сегодня мы
- Окончательно определимся с тем, как использовать параметры Родрига-Гамильтона для описание ориентации тела в пространстве
- Рассмотрим формы представления уравнений движения свободного тела: покажем как тензорные уравнения можно превратить в матричные и компонентные.
- Выполним моделирование движения свободного твердого тела при различных соотношениях между главными моментами инерции и покажем, как проявляет себя эффект Джанибекова.
1. Дифференциальные уравнения свободного движения в тензорной форме
Мы уже не раз рассматривали эти уравнения в векторном виде
Векторная форма записи удобна для общего анализа характера зависимостей, она привычна и в ней видно, что означает конкретное слагаемое. Однако, для дальнейшего преобразования уравнений в форму, удобную для моделирования, перейдем к тензорной записи
где
Система уравнений (2) уже является замкнутой, интегрируя её можно получить закон движения центра масс и зависимость угловой скорости тела от времени. Но, нас ещё будет интересовать ориентация тела, поэтому дополним данную систему уравнений
Уравнение (3) есть ничто иное как представление компонент угловой скорости через параметры ориентации Родрига-Гамильтона. Это выражение мы уже получали в предыдущих статьях. Теперь мы будем рассматривать его как дифференциальное уравнение, связывающее параметры ориентации с компонентами угловой скорости.
Однако, параметры Родрига-Гамильтона являются избыточными — их четыре, а для описания ориентации тела в пространстве достаточно трех координат. И число неизвестных в системе (2), (3) превышает число уравнений на единицу. Значит нам придется дополнить уравнения (2) и (3) уравнением связи между параметрами ориентации. В статье о параметрах Родрига-Гамильтона мы показали, что поворот тела удобно описывать единичным кватернионом, что есть
или, в тензорном виде
Продифференцируем (4) по времени
С учетом коммутативности скалярного произведения полагаем
и есть искомое уравнение связи. Полная система уравнений движения свободного твердого тела в тензорной форме будет иметь вид
Довольно страшновато — (6) содержит 13 нелинейных дифференциальных уравнений первого порядка с 13 неизвестными величинами. Страшно выглядит из-за общей тензорной записи, но при переходе к конкретным координатам, в нашем случае декартовым, система (6) значительно упростится.
2. Матричная форма дифференциальных уравнений движения твердого тела в декартовом базисе
Введем вектор-столбец фазовых координат тела
где
В декартовом базисе метрический тензор представлен единичной матрицей а символы Кристоффеля равны нулю, поэтому система уравнений (6) в матричной форме запишется так
где введены матрицы
Разрешая систему (7) относительно первых производных, получаем
систему уравнений движения в форме Коши.
3. Моделирование эффекта Джанибекова
В отсутствие внешних силовых факторов правая часть системы (8) равна нулю, и уравнение движения центра масс интегрируется легко, с учетом начальных условий
Вращение гайки описывается системой семи уравнений первого порядка, которые получаем из (8), вводя безразмерные моменты инерции
Для численного интегрирования системы (9) зададим начальные условия
где
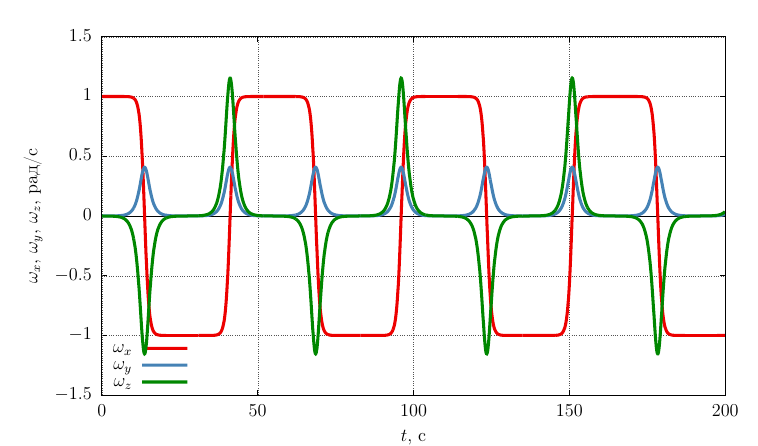
При значениях параметров
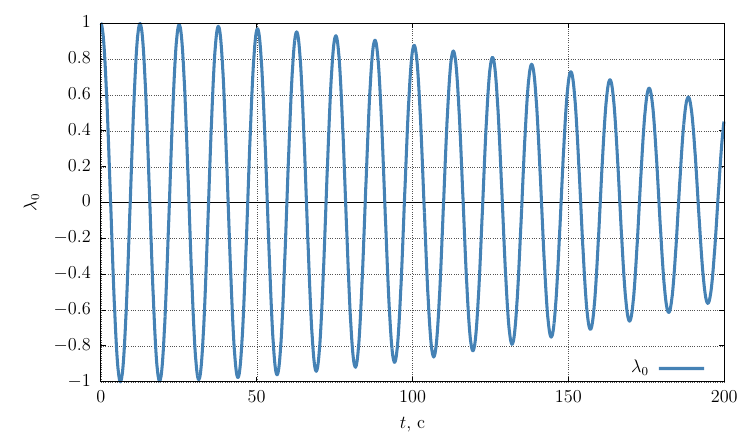
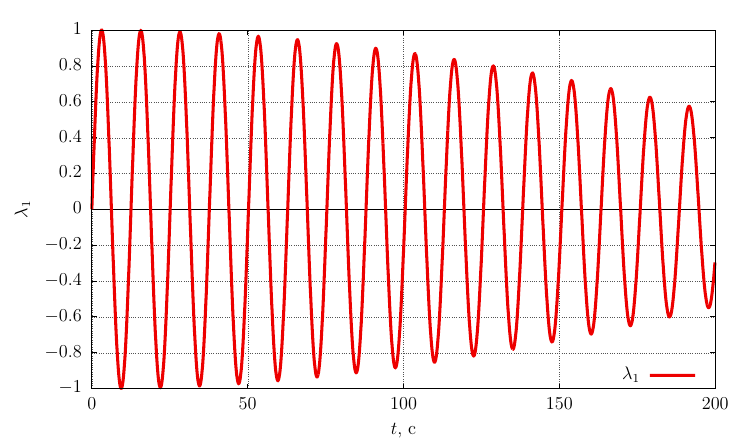
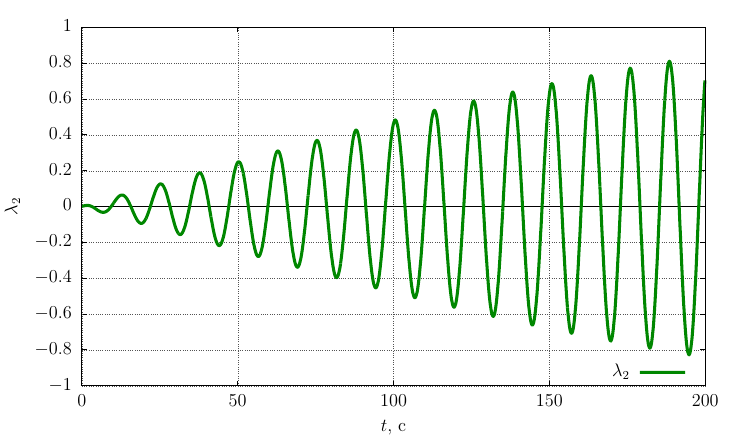
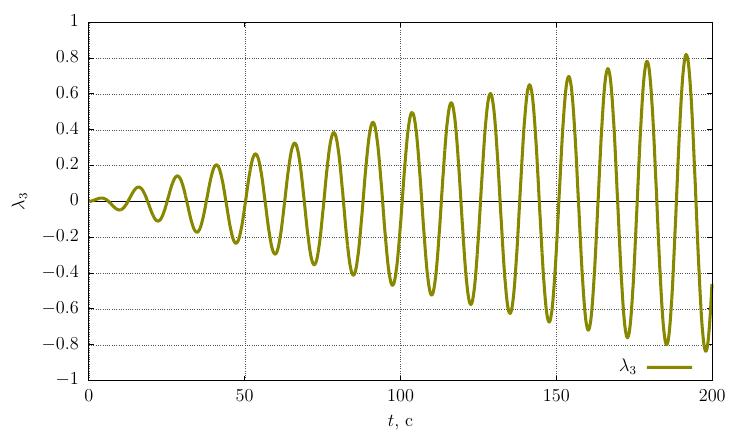
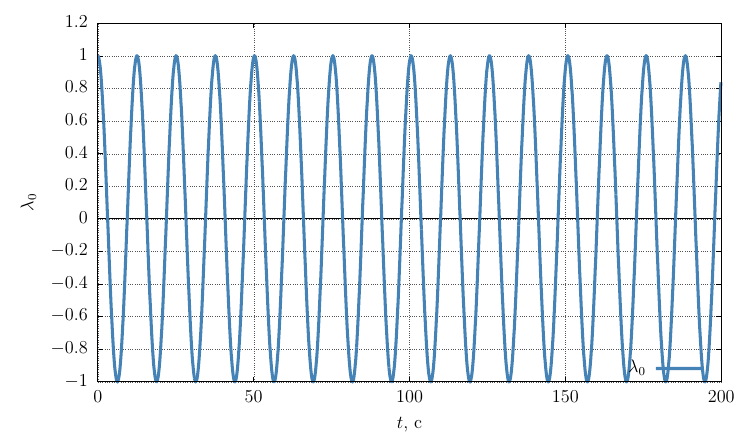
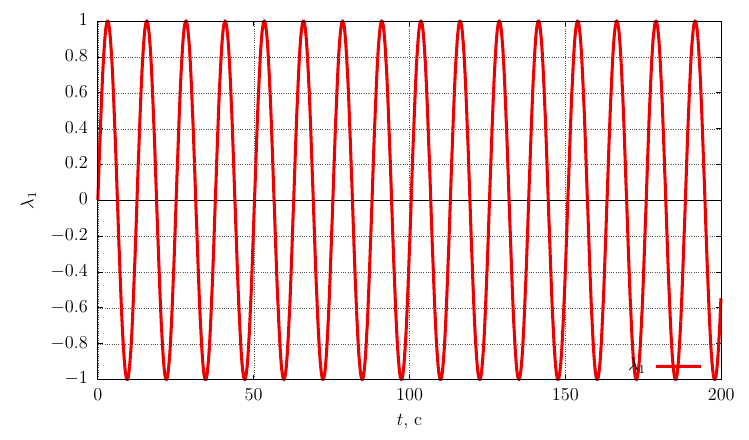
Параметры ориентации Родрига-Гамильтона
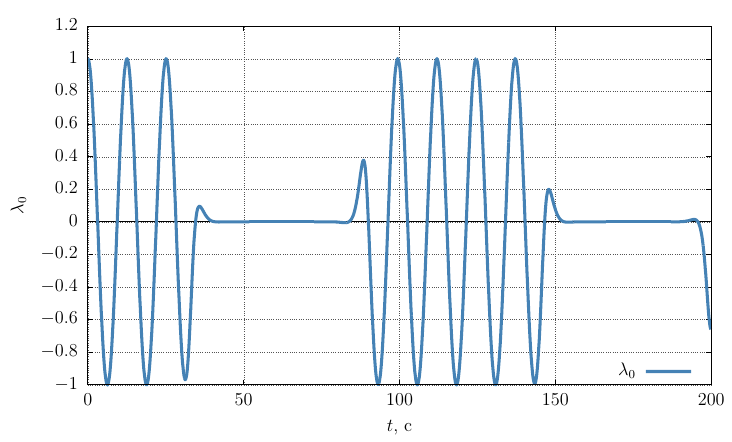
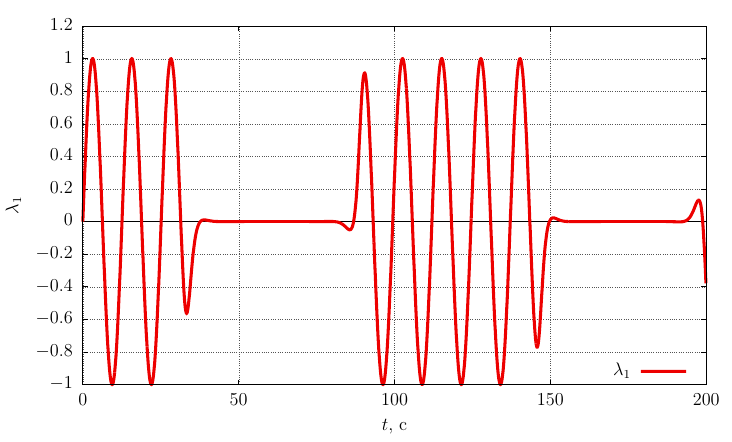
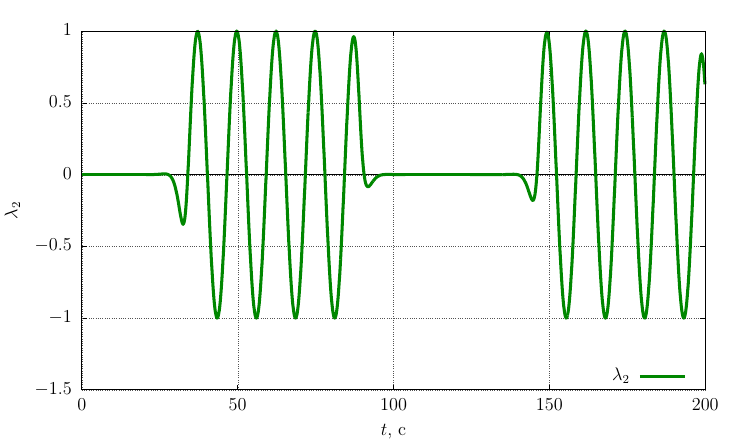
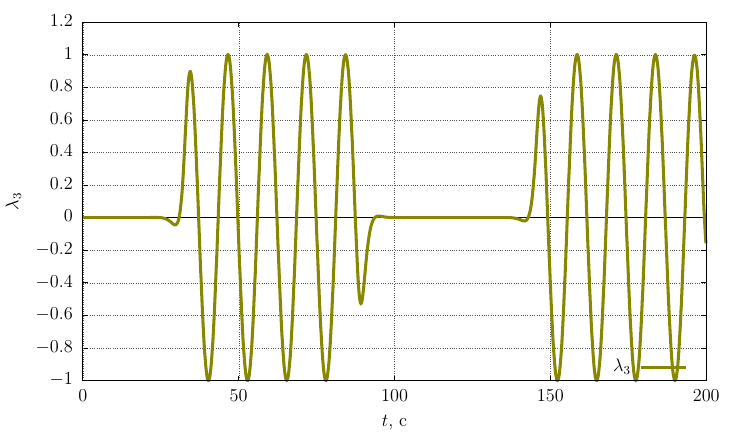
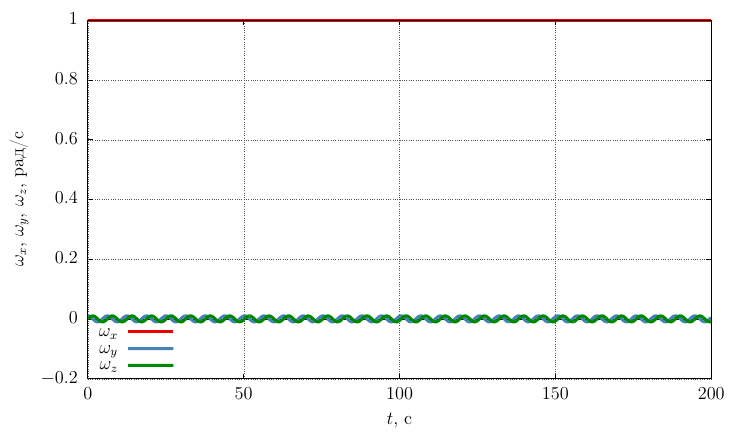
Проекции угловой скорости на собственные оси
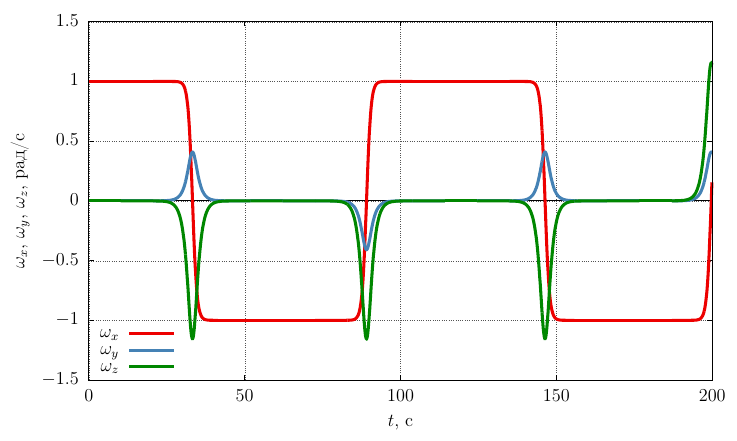
Из графиков видно, что при
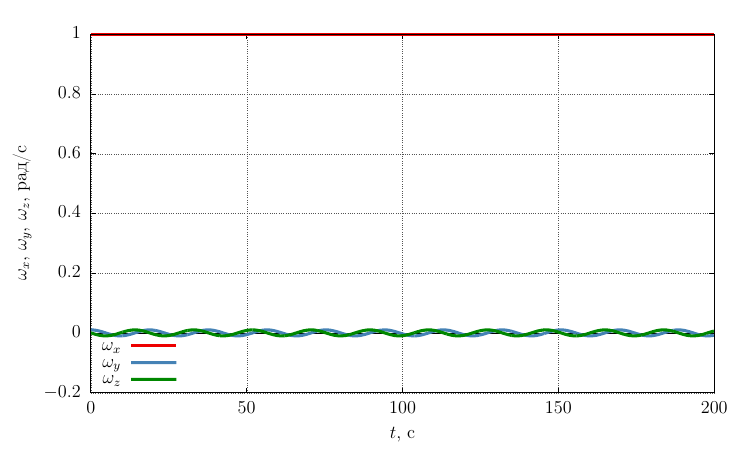
Сравним полученный результат с движением тела, закрученным вокруг оси с максимальным моментом инерции, то есть положим
Параметры ориентации Родрига-Гамильтона
Проекции угловой скорости на собственные оси
Видно, что при достаточно значительном возмущении угловой скорости движение остается устойчивым вращением вокруг оси
Похожая картина наблюдается для тела, закручиваемого вокруг оси с минимальным моментом инерции (
Параметры ориентации Родрига-Гамильтона
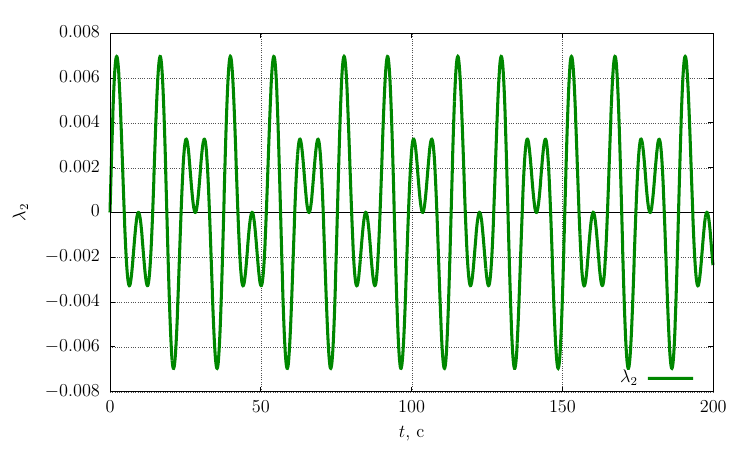
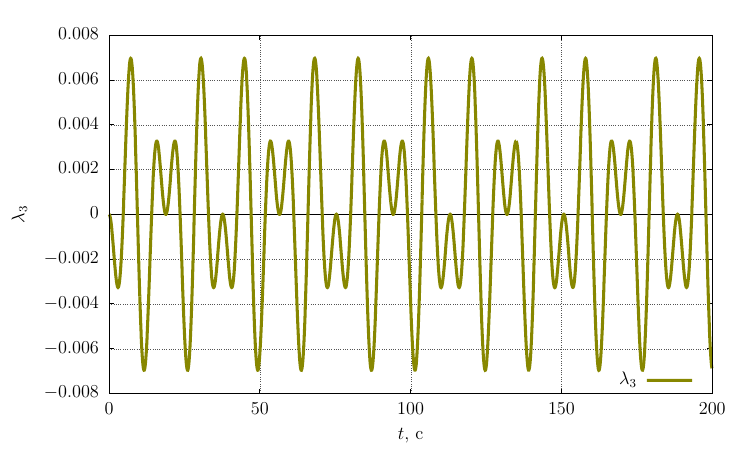
Проекции угловой скорости на собственные оси
Частота прецессии существенно меньше, чем при закрутке вокруг оси с максимальным моментом инерции, что логично, так как колебания происходят вокруг оси с большим моментом инерции, чем в случае
Заключение
Все расчеты выполнены автором в СКА Maple 18. Графики построены из лога расчета связкой Kile + LaTeX + gnuplot.
Хотелось бы ещё сделать анимацию, однако опыт автора в этом вопросе крайне мал. Поэтому хотел бы задать вопрос читателям — существует ли ПО (для Linux/Windows), с помощью которого имея набор значений параметров кватерниона ориентации в зависимости от времени сделать анимационный ролик, иллюстрирующий движение тела? Подозреваю, что подобное можно провернуть с Blender 3D, но не уверен.
А пока что, благодарю за внимание!
Upd:
Благодарности
Однако, я совершенно забыл написать о том, что данная статья (и предыдущая) подготовлена с использованием веб-приложения Markdown & LaTeX Editor, разработанный пользователем parpalak. Данная система позволяет набирать тексты статей в Makdown и LaTeX и генерирует код, пригодный для непосредственной вставки в хабра-редактор. Признателен автору за участие в тестировании продукта. С его разрешения, рекомендую данную систему к использованию при подготовке математизированных текстов статей
Продолжение следует…
Комментарии (14)

parpalak
09.08.2015 19:46Я тут подумал, а можно ли аналитически вычислить время переворачивания гайки (43 сантиметра из предыдущей статьи)?
С первого взгляда кажется, что это время зависит от возмущения. Если возмущение нулевое, время равно бесконечности. Какая зависимость времени переворачивания от
Было бы интересно с помощью моделирования определить время для нескольких значений возмущений и построить график.
maisvendoo
09.08.2015 20:02От возмущения не зависит. Возмущение принимается бесконечно малой величиной, что мы о нем знаем? При численном счете мы, разумеется принимаем конкретные значения, но по сути возмущения лежат в окрестности установившегося режима движения и малы.
А вот от начальной угловой скорости установившегося вращения и от безразмерных моментов инерции iy и iz — очень даже зависит. Это можно было конечно показать, и построить графики, но надо существенно модифицировать программу на Maple. Теперь жалею, что не заморочился. Но думаю, когда сделаю 3d-ролик в той же статье приведу и такие графики.parpalak
09.08.2015 20:26Это вы выбрали возмущение малым, чтобы построить графики. Но ясно, что от величины возмущения будет зависеть, через какие промежутки времени тело переворачивается (у вас сейчас ~55 секунд). Иными словами, красные горизонтальные участки должны быть тем длиннее, чем меньше возмущение:
Если возмущение нулевое, то тело всегда будет вращаться вокруг оси с промежуточным моментом инерции, так какявляется решением (хоть и неустойчивым) уравнений (9).
maisvendoo
10.08.2015 03:05Нет, возмущение будет именно малым. Если, например
, то это уже совершенно другой режим установившегося движения, вопрос о об устойчивости которого следует решать, опять вводя малые возмущения.
Не путайте начальные условия и возмущения. Начальные условия четко определены, возмущения же — продукт действия неучтенных внешних факторов, как-то вязкость воздуха и его движение, микрогравитация, несовершенство резьбы винта, с которого начала движение гайка.
Задать малое возмущение в виде начального условия — самый простой вариант возмутить движение при моделировании, особенно в отсутствие малых силовых факторов, которыми мы пренебрегаем.
Но, повторюсь, задание угловых скоростей по оставшимся осям, так чтобы они были сравнимы с рассматриваемой омегой — означает задать совершенно другой режим движения. Мы его в контексте данной задачи не рассматриваем. Мы рассматриваем вращение гайки вокруг оси x.
Кстати, то движение которое начинается после лавинообразного переворота уже тоже не относится к первоначальному неустойчивому вращению, так как отклонение достигло таких величин, что движение окончательно ушло от первоначального режима. На графике, что Вы привели в комментарии — мы изучаем устойчивость движения от 0 до около 35 секунд. Дальше уже другое движение — система неустойчиваmaisvendoo
10.08.2015 03:17Объяснение того, что есть
дается в следующей статье-довеске, в разделе посвященном функциям Ляпунова. Четко говорится о том, что функции, определяющие возмущенное движение удовлетворяют условию
где h — достаточно малое число.
maisvendoo
10.08.2015 03:25Ведь можно рассматривать и, например, задачу об устойчивости программного поворота спутника на орбите, когда вектор угловой скорости меняется по некоторому закону
. Этот закон будет установившимся режимом, а возмущенное движение будет отличаться от этого режима на некоторую малую величину
. И вот вопрос устойчивости как раз и заключается в выяснении того, останутся ли эти отклонения малыми, сойдутся ли к исходной программе движения или увеличатся, перестав быть малыми и испортив программу управления.
Только в этом случае система уравнений возмущенного движения будет не автономной (коэффициенты, зависящие от программы управления будут зависеть явно от времени), система будет нелинейной, но вопросы устойчивости будут рассматриваться всегда в контексте малых отклонений от программы. В этом вся суть теории устойчивости механического движения
maisvendoo
10.08.2015 03:37Кстати, на том графике, что Вы привели в комментарии, по осям отложены не дельты, там отложены проекции угловой скорости. И этот график показывает, что как ни мало начальное отклонение от установившегося режима (
!!!), в силу неустойчивости последнего, отклонение разовьется и даст вращение вокруг осей y и z.
Обратите внимание на график, иллюстрирующий устойчивое вращение
Он показывает, что в случае если рассматриваемое движение устойчиво, то отклонения от него не превысят первоначального возмущения. Отклонение здесь выбрано довольно большим, чтобы были видны колебания, но все же в 100 раз меньше угловой скорости основного вращения.
Так что рассматривать период переворотов как функцию дельт омеги не правильно, исходя из самой сути задачи об изучении устойчивости.parpalak
10.08.2015 14:31Принимаю поправку насчет терминов (возмущения и начальных условий). Но суть моего вопроса от этого не меняется.
Вектор момента импульса обходит траектории на эллипсоиде из интерпретации Мак-Куллага. Мой вопрос в том, какое время занимает этот обход. Время обхода у каждой траектории своё. Очевидно, выбор начальных условий эквивалентен выбору траектории, больше он ни на что не влияет.
Я поэкспериментировал с маплом. У меня получилось, что с уменьшением отклонения оси вращения от оси с промежуточным моментом инерции время обхода растет логарифмически. Из соображений размерности для угловой скоростивремя обхода должно быть таким:
.
Логарифм наверняка можно получить из эллиптических функций, через которые в общем виде выражается решение уравнений для свободного вращения твердого тела.
Кстати, из первоначальной процитированной вами формулировки следует, что расстояние до переворота в 43 сантиметра повторялось от измерения к измерению. Скорее всего это объясняется неточностью изготовления гайки: ось ее вращения не совпадает с осью с промежуточным моментом инерции. Неопределенность начальных условий (то, как гайка болталась при закручивании) была небольшой и влияла меньше, чем несовпадение осей. Иначе гайка пролетала бы различные расстояния и переворачивалась бы в разные стороны.maisvendoo
10.08.2015 22:40ось ее вращения не совпадает с осью с промежуточным моментом инерции
Почти наверняка не совпадает. Не думаю, что производители гаек для крепления грузов (даже космических) подобным заморачиваются.
Да, однако с величиной начального возмущения интересно поиграться. Вот например просто поменял знаки — получается разная картинка
Движение гайки Джанибекова при различных начальных возмущениях




parpalak
10.08.2015 23:13Не совсем. На первых двух графиках три зеленых «зубца» смотрят в одну сторону, а четвертый в другую. На вторых двух — по два «зубца» смотрят вверх и вниз.
Вообще критические траектории из интерпретации Мак-Куллага делят эллипс на 4 части, в каждой из которых траектории своего типа.
Вот что пишет Журавлев
maisvendoo
10.08.2015 22:59Ну и еще результаты, для различного значения начального возмущения по оси игрек
Характер движения гайки Джанибекова при различной величине начального возмущения







parpalak
10.08.2015 23:31На последнем графике есть интересный эффект, который я тоже наблюдал в мапле. Первые ~100 секунд ничего не происходит, а потом тело переворачивается с полупериодом ~50 секунд.
Я думаю, что это артефакт численных расчетов, потому что физических причин для такого поведения нет.
Скорее всего в момент переворачивания происходит потеря точности из-за округления, и численный расчет перескакивает к другой траектории на эллипсоиде Мак-Куллага, для которой период меньше. И, наверно, вместо замкнутой линии в ходе моделирования получается незамкнутая спираль.
Мне кажется, что если применить более точный метод численных расчетов, то полупериод на последнем графике будет ~200 секунд. Я больше доверяю времени до переворота, а не периоду «установившегося» движения, потому что оно растет как нужно, логарифмически:maisvendoo
10.08.2015 23:39Надо попробовать интегрировать более точным методом. Использовал «умолчальный» метод в настройках dsolve()
lamerok
Unity3D нет? docs.unity3d.com/ScriptReference/Quaternion.Euler.html