

Advanced Gun System (слева) создана как замена 16-дюймовых орудий линкоров (справа). Если не считать управляемых по GPS снарядов, цифровые технологи системы управления огнём AGS выполняют ту же задачу, что Rangekeeper Mark 8 линкора «Айова», только обладают меньшим весом и работают с ними меньше людей.
Новейший эскадренный миноносец типа «Замволт» (Zumwalt), в данный момент проходящий приёмо-сдаточные испытания, имеет на борту новый тип корабельной артиллерии: Advanced Gun System (AGS). Автоматизированная AGS способна выстреливать до 10 снарядов высокой точности с ракетным ускорением в минуту по целям на дальности в 100 миль.
Эти снаряды используют GPS и инерциальную систему наведения для повышения точности орудия до окружности возможной погрешности в 50 метров (164 футов). Это означает, что половина этих управляемых GPS снарядов упадёт в пределах этого расстояния до цели. Но если убрать навороченные снаряды с GPS, то AGS и её цифровая система управления огнём станут не более точными, чем механическая аналоговая технология, которой уже почти исполнился целый век.
Я имею в виду такие электромеханические аналоговые компьютеры управления огнём, как Ford Instruments Mark 1A Fire Control Computer и Mark 8 Rangekeeper. Эти машины могли непрерывно и в реальном времени выполнять расчёты с 20 и более переменными ещё задолго до того, как цифровые компьютеры проложили себе дорогу в море. Когда я служил на борту линкора «Айова» в конце 1980-х, они по-прежнему ещё использовались.
Во время моего срока службы было предпринято несколько попыток скомбинировать эти устаревшие системы с цифровыми технологиями или заменить их. Примечательной стала одна из них (Advanced Gun Weapon System Technology Program), которая была похожа на снаряд AGS с дальностью 100 миль: 11-дюймовый снаряд в форме дротика с GPS и инерциальным наведением, заключённый в отделяемый 16-дюймовый корпус (поддон), способный благодаря большому калибру орудий линкора пролететь без ракетного ускорения почти такое же расстояние.
Так почему же ВМФ пошёл по пути «цифровизации» крупных орудий линкоров? Я задал этот вопрос отставному капитану ВМФ Дэвиду Бослоу — бывшему директору Navy Tactical Embedded Computer Program Office. Если кто-то и знает ответ, то это Бослоу. Он сыграл важную роль в разработке Navy Tactical Data System — предшественника современных систем «Иджис» (Aegis), праматери всех систем цифровых датчиков и управления огнём.
«Однажды моему комитету поручили провести исследование перспектив модернизации систем управления огнём линкоров класса „Айова“ с аналоговых на цифровые компьютеры», — рассказывает Бослоу. «Мы выяснили, что цифровизация компьютеров не повысит ни надёжность, ни точность системы и выпустили рекомендацию не вносить изменений». Даже без цифровых компьютеров «Айова» могла выстреливать со смертоносной точностью 2700-фунтовые (1225 кг) «глупые»снаряды примерно на 30 миль с диаметром вероятной погрешности в 80 метров. Некоторые снаряды линкора имели больший диаметр поражения.
Но как же коробка с шестернями, кулачками, рейками и штифтами была способна выполнять в реальном времени баллистические расчёты на основе дифференциальных уравнений с десятками переменных? Как вообще удавалось махине весом с Volkswagen Beetle навестись на цель за горизонтом? И почему эти устройства из металла и смазки так долго превосходили в вычислениях цифровые системы? Давайте начнём с небольшого экскурса в историю баллистики линкоров и обучающих фильмов ВМФ, демонстрирующих процесс работы аналоговых компьютеров.
По траектории
Стрельба орудием с судна — не самая простая задача. Кроме обычных проблем, с которыми сталкивается баллистика — вычисление мощности выстрела, высоты прицеливания, поправки на ветер и эффекта Кориолиса — добавляется тот факт, что стрельба ведётся с платформы, постоянно изменяющей дифферент килевой качки, рыскание и положение. Если вам повезло и цель неподвижна, то из-за количества переменных это всё равно сравнимо с попыткой попасть в мишень шариком с водой, сидя на спине скачущего кенгуру.
Стрельба по целям в радиусе видимости судна — это цикл с обратной связью. Прицеливаемся, вычисляем относительное движение цели и другие баллистические условия, выстреливаем, смотрим, куда попал снаряд, и подстраиваем параметры. Стрелять по целям за горизонтом ещё сложнее. Требуется наблюдатель, дающий точные географические координаты и корректирующий огонь в зависимости от места попадания снарядов.
В эпоху до изобретения орудийных башен суда стреляли пушками с бортов. Корректировка в основном выполнялась в зависимости от места попадания снарядов и ожиданием пока борт, смотрящий на противника, не поднимет качкой вверх. Но с появлением в начале 20-го века дредноутов и линейных крейсеров дальность и смертоносность орудий судна значительно возросли. Однако теперь им требовалась и гораздо бо?льшая точность.
Эта потребность согласовывалась с развитием аналоговых компьютеров. Механические аналоговые компьютеры уже веками использовались астрономами для прогнозирования расположения звёзд, затмений и фаз луны. Самый первый из известных нам механических аналоговых компьютеров — антикитерский механизм, датируется примерно 100 годом до нашей эры. Но до недавнего времени никто не догадывался использовать компьютеры для убийства людей.
Для выполнения вычислений аналоговые компьютеры используют стандартный набор механических устройств — устройства того же типа, что преобразуют создаваемый двигателем автомобиля вращающий момент во вращение колёс, движение клапанов и поршней. Данные в аналоговые компьютеры «вводятся» непрерывно, обычно при помощи вращения входных валов. Математическое значение привязывается к одному полному повороту вала на 360 градусов.
Во времена древних греков ввод данных выполнялся поворотом колеса. В более современных аналоговых компьютерах переменные данных датчиков — скорость, направление, скорость ветра и другие параметры — передавались посредством электромеханических соединений: сигналов синхронизации гирокомпасов и гироскопических «гировертикалей», систем слежения и датчиков скорости. Константы, например, прошедшее время, вводились специальными электромоторами с постоянной скоростью.
Чтобы превратить валы в непрерывное множество выходных данных вычислений, соединял их все вместе набор шестерён, кулачков, реек, штифтов и других механических элементов, преобразующих движение в математические вычисления при помощи геометрических и тригонометрических принципов. Также производились «жёстко заданные» функции, хранящие результаты более сложных вычислений в своих прецизионно изготовленных формах. При совместной работе эти детали мгновенно вычисляли очень точный ответ на конкретный набор вопросов: где будет находиться цель, когда до неё долетит огромная пуля, которую я выталкиваю из нарезного ствола длиной 68 футов (21 метр), и куда мне нужно целиться, чтобы она туда попала?
При идеальной сборке аналоговые компьютеры могут гораздо более точно отвечать на такие вопросы, чем цифровые компьютеры. Поскольку они используют не цифровые, а физические входные и выходные данные, то могут описывать кривые и другие геометрические элементы вычислений с бесконечным уровнем разрешения (однако точность этих вычислений зависит от качества изготовления деталей и снижается вследствие трения и проскальзывания). При этом не отбрасываются никакие менее значимые цифры, а ответы даются непрерывно и не зависят от синхронизируемых тактов вычислений «for-next».
Кодинг в металле
Наиболее фундаментальной частью любого механического аналогового компьютера являются его шестерни. Используя сочетания шестерён разного типа, аналоговый компьютер способен выполнять такие простейшие математические функции, как сложение, вычитание, умножение и деление.
Передаточные отношения — применение двух шестерён, имеющих конкретное соотношение длин окружностей — это простейший способ выполнения вычислений при помощи механизмов. Их можно использовать для увеличения или уменьшения входных или выходных значений или для применения постоянных множителей входных данных к другим вычислениям. Например, если повернуть вал, отношение которого к другому валу составляет 2 к 1, то выходной вал повернётся в два раза меньшее количество раз.
Системы реечной передачи наподобие использующихся при управлении автомобилем, также применяются в аналоговых компьютерах для преобразования вращательного движения в линейные выходные данные; они геометрически перемещают считываемые данные или компоненты для решения других типов вычислений в баллистической задаче.
Понять, как работали подобные шестерённые системы в аналоговых компьютерах, можно из фрагмента обучающего фильма ВМФ 1953 года, посвящённого компьютерам управления огнём:
Валы и шестерни компьютера управления огнём.
Шестерни дифференциала автомобилей предназначены для того, чтобы колёса на поворотах вращались с разными скоростями. Но в аналоговых компьютерах они выполняют другую функцию: обеспечивают возможность выполнения механического сложения и вычитания. Набор дифференциальных шестерён, установленный между двумя входными валами с одинаковыми шестернями, всегда будут совершать повороты, являющиеся математическим средним поворотов двух входных валов; если умножить это среднее на два, то получим алгебраическую сумму двух входных значений. Например, если один входной вал повернулся три раза вперёд, а другой повернулся один раз вперёд, то дифференциальные шестерни повернут связанный с ними вал два раза, то есть половину от их суммы — четырёх.
Дифференциальные шестерни, используемые в аналоговых компьютерах.
Всё это замечательно, когда речь идёт о простейшей математике. Но для функций более высокого уровня, например, для вычисления кривых баллистической траектории или влияния эффекта Кориолиса на долго летящие снаряды, аналоговым компьютерам требуются более сложные детали. Некоторые из этих функций могут выполнять кулачки — вращающиеся поверхности, изготовленные таким образом, чтобы «хранить» ответы для интервала значений. Простые кулачки могут хранить интервал ответов, зависящих от одной переменной, например, превращение входного вращения в тригонометрические или логарифмические выходные данные при помощи соединённого с рейкой штифта. Более сложные трёхмерные барабанные кулачки могут хранить ответы на сложные функции с двумя переменными, например, вычисления вращательного объёма. Пример показан в этом фрагменте фильма:
Кулачки — хранимые функции аналоговых вычислений.
Все эти компоненты были хорошо известны создателям первых астрономических калькуляторов, однако способ их изготовления не мог обеспечить точность даже близкую к точности, которой могут достичь инструменты индустриальной эпохи. Но есть ещё один механический компонент, соединяющий всё необходимое для сложных вычислений, требуемых для прогнозирования положения цели в баллистических вычислениях: интегратор. Это устройство, использующее различные частоты вращения поворотного диска, применяемое в качестве плавно регулируемой дифференциальной передачи.
Интегратор, впервые разработанный профессором Джеймсом Томпсоном из Белфаста в 1876 году, был усовершенствован его братом лордом Кельвином как элемент «анализатора гармоник».

«Анализатор гармоник» лорда Кельвина с дисковыми интеграторами.
Лорд Кельвин использовал анализатор гармоник для изолирования различных факторов, влияющих на приливные паттерны, чтобы их можно было предсказывать в будущем. Компьютер получал два входных значения: время было представлено в виде вращения с постоянной скоростью, а высота прилива отслеживалась из записи при помощи механической иглы. Тросики и шкивы генерировали выходные данные, отрисовывая кривую на бумажном ролике. Британскому флоту полюбился компьютер приливов Кельвина, потому что он позволял собирать исторические данные приливов, записанные в любой точке мира, а затем создавать таблицы приливов за гораздо меньшее время. Более чем полвека спустя компьютеры приливов лорда Кельвина помогли в планировании высадки союзников в Нормандии, таким образом внеся непосредственный вклад в результат Второй мировой войны.
Если не считать усовершенствований, повышающих их надёжность в суровых условиях эксплуации на море, компьютеры управления огнём, использовавшиеся на вплоть до конца 1990-х, по сути, функционально оставались такими же, какие использовал лорд Кельвин. Они показаны в представленном ниже видео. Ганнибал Форд, разработавший компьютеры управления огнём Rangekeeper и Mark 1, изобрёл этот улучшенный интегратор, в котором использовалась пара шариков в ходовом механизме, передающая информацию вращения с поворотного диска.
Интегратор дискового типа, аналогичный применявшемуся в компьютере управления огнём Mark 1, по функциям и конструкции схож с интегратором лорда Кельвина.
Сеть компьютера (управления огнём)
«Системы» управления огнём Первой мировой войны по большей мере были отдельными устройствами, соединёнными людьми, выкрикивающими информацию по телефонам и переговорным трубам. Единственными данными, поступавшими в Rangekeeper Mark I автоматически, был курс судна, передаваемый репитером гирокомпаса. Ситуация изменилась в следующем десятилетии, когда флоты мира лучше освоились с новинкой под названием «электричество».
Вашингтонское морское соглашение 1922 года почти десяток лет ограничивало дальнейшее развитие флота, но на протяжении 1920-х Форд продолжал совершенствование своего Rangekeeper, кульминацией которого стал Rangekeeper Mark 8 1930 года. Mark 8 стал вершиной систем управления огнём крупной корабельной артиллерии. Эта система использовалась на линкорах класса «Айова»и управляла 16-дюймовыми орудиями всех четырёх судов с момента их ввода в действие во время Второй мировой войны до бомбардировки иракских войск в феврале 1991 года во время войны в Персидском заливе.

Центральный артиллерийский пост батареи линкора «Миссури», на котором располагались Rangekeeper Mark 8 и его аналоговое вычислительное оборудование. Настенные распределительные щиты позволяли переключать башни и орудия, управляемые системой.
Rangekeeper Mark 8 также предоставлял операторам возможность ручного ввода данных на случай отказа соединения с датчиками; кроме того, они могли изменять данные на основании наблюдения за выстрелами и вносить другие корректировки. Машина даже могла работать без электричества благодаря ручному вращению маховика. Пеленг цели и расстояние до неё теперь поступали в виде электрических входных данных от прибора управления артиллерийским огнём. Скорость корабля передавались автоматически на основании данных датчика его скорости, а скорость ветра — непосредственно от анемометра.
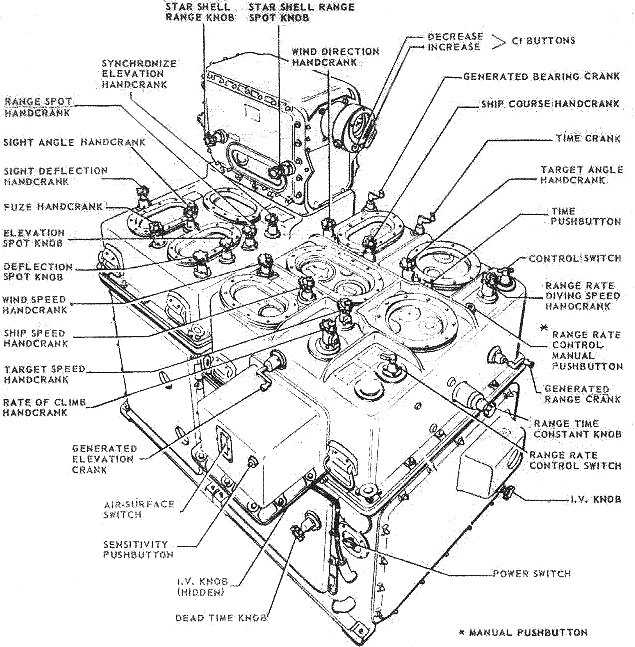
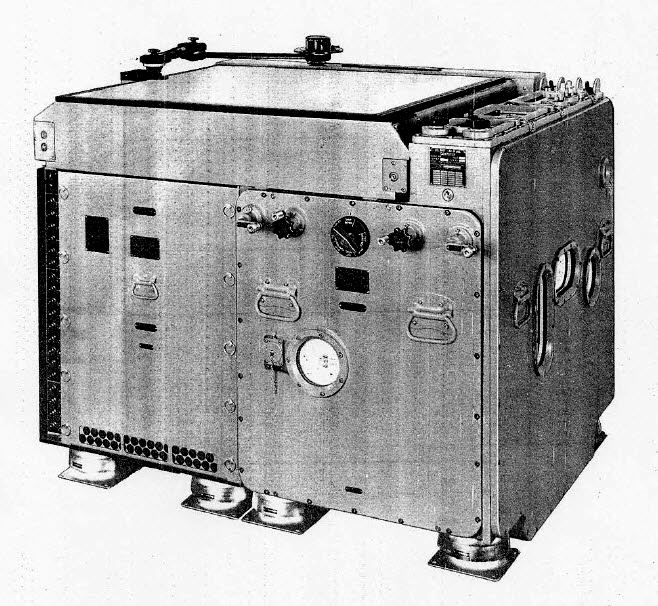
После «наведения» системы на цель Mark 8 передавал через распределительный щит сигналы орудийным башням и установкам для сохранения их правильного прицеливания, а затем отправлял данные стабилизации для корректировки возвышения орудий в соответствии с рысканием и дифферентом килевой качки судна. Сам Mark 8 имел электромеханическую сеть. Он состоял из пяти корпусов аналогового компьютерного оборудования, скреплённых вместе в единый модуль.
Mark 8 был предназначен для крупных орудий, которые из-за своего размера и темпа стрельбы использовались только для обстрела надводных и наземных целей. Более мелкие орудия, например 5-дюймовые сдвоенные установки калибра 38 на «Айове» и множестве меньших военных кораблей эпохи Второй мировой войны, должны были иметь возможность прицеливаться в более быстрые и мелкие цели в трёх измерениях — проще говоря, в самолёты. Для этого требовались гораздо более сложные вычисления, что привело к созданию венца электромагнитных аналоговых вычислений: компьютера управления огнём Ford Instruments Mark 1.
Mark 1A Fire Control Computer — вычислительная мощь в 3000 фунтах алюминиевого сплава.
Mark 1 весил более 3000 фунтов (1360 кг). Как и Rangekeeper, он получал входные данные от приборов управления артиллерийским огнём — «башенок» с электромеханическим приводом и оптическими датчиками (а позже и радарами), которые непрерывно передавали информацию о пеленге и расстоянии через электрические сигналы синхронизации.
Компьютер учитывал смещение между прибором управления и управляемыми им орудиями. Также ему нужно было вычислять время горения механических взрывателей, чтобы снаряд взорвался рядом с целью. (Тем не менее, на учебных стрельбах в 1980-х было несколько случаев, когда «Айова» прямой наводкой практике поражала буксируемую воздушную мишень, хоть и ненамеренно.)
Mark 1, считавшийся самым точным противовоздушным компьютером во время войны, всё равно обладал довольно серьёзными ограничениями. Для взрывания снарядов рядом с воздушными целями он использовал механические взрыватели и был способен выполнять вычисления для воздушных целей, движущихся со скоростью менее 400 узлов относительной горизонтальной и 250 узлов относительной вертикальной скорости. Из-за этого он был неэффективен против реактивных самолётов и атак камикадзе.
Прощайте, шестерни
Компьютер Mark 48 для «атак на побережье» — электрическая аналоговая система с электромеханическими входными данными. Он имел световой стол для карт, проецирующих снизу позицию и данные цели.
Так почему же мы вообще отошли от использования этих механических шедевров в деле наведения на цели и их подрыва? Несмотря на свою высокую точность, механические аналоговые компьютеры обладали ограничивающими факторами. Они тяжелы и занимают много пространства. Даже когда они стали более автоматизированными, им по-прежнему требовался большой штат обслуживающего персонала. Вращающий момент, требовавшийся для их работы, в том числе всех сервоприводов, преобразующих электрические сигналы во вращение, требовал много электричества — 16 киловатт при пиковой нагрузке.
И несмотря на их общую надёжность, серьёзнейшими врагами электромеханики являются трение и механическая усталость. Обеспечение достаточной смазки и слежение за износом шестерён компьютера управления огнём — гораздо более серьёзная работа, чем визит в ближайший автосервис для замены масла. Кроме того, существует проблема «перепрограммирования» аналогового компьютера. Если вы хотите изменить диапазон получаемых ими входных данных или изменить выходные данные, чтобы они учитывали новые переменные, то это будет похоже на пересборку трансмиссии.
Для большинства применений, под которые создавались аналоговые компьютеры, это не представляет проблемы. За последний век переменные управления огнём практически не менялись. Появление реактивной авиации и необходимость обеспечивать бомбардировки наземных целей с большей дальностью привели к новому циклу инноваций в аналоговых системах, которые продержались до середины 1970-х: электрических аналоговых систем.
Эти электронные вычислительные системы не были цифровыми и выполняли те же функции, что и шестерни с кулачками, но в виде аналоговых электронных компонентов. Однако электронные детали были легче и проще в обслуживании, чем полномасштабные механические системы, и позволяли интегрироваться с механическими системами при помощи сигнальных выводов, похожих на сигналы синхронизации, использовавшихся для интегрирования в общую систему прочих датчиков.
Во время Второй мировой войны Bell Labs разработала первый полностью электронный компьютер управления огнём — Bell Mark 8. Хотя он так и не был введён в эксплуатацию, отдельные части его технологий были объединены с модификацией Ford Mark 1, получившей название Mark 1A. Усовершенствованная система помогала отслеживать более быстрые летательные аппараты и наводиться на них.
Дополнительную электрическую помощь в прицеливании по наземным целям Mark 1A и Rangekeeper Mark 8 также получили во время Корейской войны. Компьютер для «атак на побережье» Mark 48 был предназначен специально для ведения «непрямого огня» — стрельбы по целям, которые корабль не мог увидеть, основываясь на информации с самолёта-корректировщика, разведчика-корректировщика или (с конца 1980-х) с дрона Pioneer. Он использовал уже имеющуюся систему прибора управления огнём для нацеливания на известную опорную точку (обычно указанный на карте элемент рельефа). Также для определения местоположения корабля он мог использовать радио- или спутниковую навигацию. На основании местоположения корабля и переданного расположения цели Mark 48 вычислял исходные данные управления огнём, передавая данные Rangekeeper или Mark 1A в зависимости от того, какие орудия использовались для бомбардировки несчастной цели.
Устаревшие системы
Четыре линкора класса «Айова» остались единственными судами, получившими Mark 48. Для прочей части флота переход на цифровые системы управления огнём начался с середины 1970-х, поскольку конструкторы кораблей стали стремиться к созданию более лёгких судов с бо?льшим упором на охоту за подлодками и летательными аппаратами, чем на стрельбу по другим кораблям.

На фото — автор статьи в молодости, когда он был морским офицером на борту линкора «Айова» в 1988 году. Фото сделано рядом с бронированной цитаделью на мостике, находившейся ниже прибора системы управления огнём, частью которой был Rangekeeper Mark 8.
В 1987 и 1988 годах я служил на борту «Айовы» в палубной команде, номинально отвечая за 125 старшин и неквалифицированных матросов. Многие люди из моего дивизиона обслуживали вторую орудийную башню или одну из 5-дюймовых орудийных батарей корабля, поэтому мой интерес к их устройству был вовсе не праздным. Я часто ползал по снарядным палубам орудийной башни, контролируя, чтобы все находились на положенных им местах.
За время моего нахождения на борту мы выстрелили больше снарядов из 16-дюймовых орудий корабля, чем «Айова» выстрелила за всю Корейскую войну. И несмотря на все эксперименты по добавлению в орудийную систему цифровых технологий, один-единственный датчик, установленный прямо перед моим попаданием на борт, сделал орудия более точными, чем они когда-либо были. Это датчик доплеровского радиолокатора, способный определять скорость снаряда при вылете из ствола.
Радар был установлен после срочного возврата в эксплуатацию линкора «Нью-Джерси» (относящегося к типу «Айова») в начале 1980-х, когда он столкнулся с серьёзными проблемами точности орудий во время бейрутского кризиса. Проблемы в основном были связаны с тем, что пороховые заряды в мешках, используемые на борту корабля, были перемешаны и их взрывной профиль изменился.
Точно измеряя скорость снаряда при вылете из орудия во время первого выстрела с конкретным количеством пороховых зарядов, личной состав управления огнём мог понять, какой она будет при других выстрелах, и соответствующим образом изменить входные данные скорости для компьютера. Я пару раз лично видел примеры этой точности на борту «Айовы», в том числе на ночных орудийных учениях у побережья Пуэрто-Рико рядом с Вьекесом. Холостыми учебными снарядами наводчики идеально поражали металлические мишени, и я даже мог видеть в нескольких милях от себя разлетавшиеся при попадании искры.
Окончательное свидетельство точности линкоров появилось во время войны в Персидском заливе, когда «Миссури» и «Висконсин» использовали дроны Pioneer в качестве самолётов-корректировщиков для атак на иракские артиллерийские батареи и бункеры. Именно после бомбардировки «Миссури» иракские войска на острове Файлака сдались выпущенному с «Висконсину» дрону, связав его низкий пролёт со неминуемой бомбардировкой.
Настоящий конец аналоговому управлению огнём пришёл не из-за его точности, а из-за банальных долларов и центов. За средства, которые нужно потратить на вывод в море «Айовы», ВМФ могла снарядить десять «Замволтов», которые к тому же могли взять двукратный запас топлива по сравнению с цистернами линкора. В 1980-х и 90-х ВМФ потратил много времени на поиск оправдания дальнейшего эксплуатации линкоров, несмотря на их стоимость, пытаясь использовать такие технологии, как Advanced Gun Weapon System Technology Program или тестируя пороховые заряды с большей мощностью. Взрыв на борту «Айовы», произошедший в 1989 году, предположительно вызванный самовозгоранием изготовленного ещё в 1930-х пороха, положил конец таким экспериментам.
Иронично, что аналоговые вычислительные технологии продолжают существовать на «Замволте» как часть его системы управления огнём. Электронные аналоговые компьютеры являются частью радиолокационной станции с фазированной антенной решёткой, обеспечивающей наводку ракет «Замволта». Тем не менее, с точки зрения старых флотских ветеранов, компьютер управления не может быть настоящим, если не имеет сервоприводов.



{kind=link}
sshikov
>до окружности возможной погрешности в 50 метров
По-русски это называется КВО.