
В наше время компьютеры представляют собой мощные вычислительные машины,
способные выполнять миллионы операций в секунду. И естественно не обойтись без симуляции реального или игрового мира. Одна из задач компьютерного моделирования и симуляции состоит в определении столкновения двух объектов, одно из решений которой реализуется теоремой о разделяющей оси.
Примечание. В статье будет приведен пример с 2 параллелепипедами(далее — кубы), но идея для других выпуклых объектов будет сохранена.
Примечание. Вся реализация будет выполнена в Unity.
Для начала нужно познакомиться с "теоремой о разделяющей гиперплоскости".Именно она будет лежать в основе алгоритма.
Теорема. Две выпуклые геометрии не пересекаются, тогда и только тогда, когда между ними существует гиперплоскость, которая их разделяет. Ось ортогональная разделяющей
гиперплоскости называется разделяющей осью, а проекции фигур на нее не пересекаются.
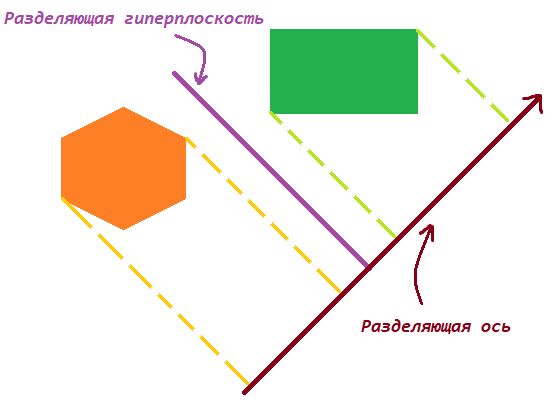
Разделяющая ось (двумерный случай)
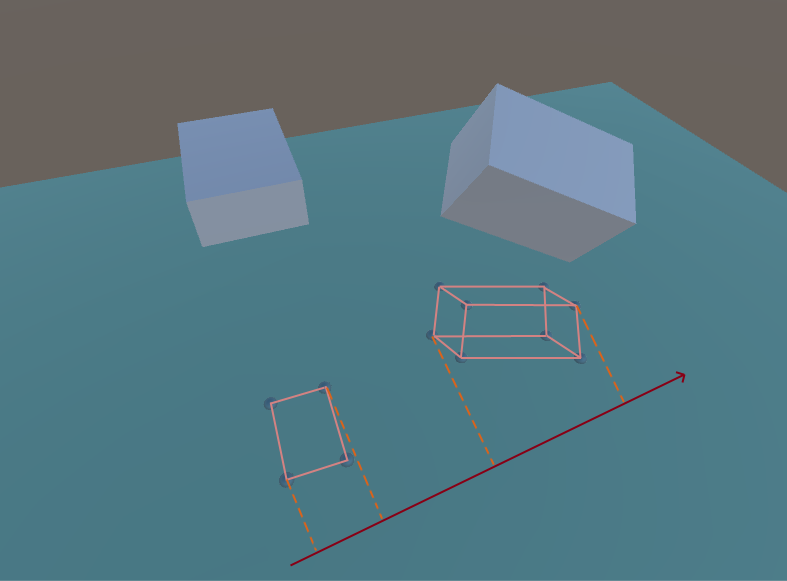
Разделяющая ось (трехмерный случай)
Можно заметить, что проекции на разделяющую ось не пересекаются.
Свойство. Потенциальная разделяющая ось будет находиться в следующих множествах:
где X — ребра первого куба (зеленые), а Y — второго (синие).

Каждый куб мы можем описать следующими входными данными:
Создадим для этого дополнительный класс, экземпляры которого будут предоставлять информацию о кубе.
Как часто бывает, объект может вращаться в пространстве. Для того, чтобы найти координаты вершин, с учетом вращения куба, необходимо понять, что такое кватернион.
Кватернион — это гиперкомплексное число, которое определяет вращение объекта в пространстве.
Мнимая часть(x,y,z) представляет вектор, который определяет направление вращения
Вещественная часть(w) определяет угол, на который будет совершено вращение.
Его основное отличие от всем привычных углов Эйлера в том, что нам достаточно иметь один вектор, который будет определять направление вращения, чем три линейно независимых вектора, которые вращают объект в 3 подпространствах.
Рекомендую две статьи, в которых подробно рассказывается о кватернионах:
Раз
Два
Теперь, когда у нас есть минимальные представления о кватернионах, давайте поймем, как вращать вектор, и опишем функцию вращение вектора кватернионом.
Формула вращения вектора
— искомый вектор
— исходный вектор
— кватернион
— обратный кватернион
Для начала, дадим понятие обратного кватерниона в ортонормированном базисе — это кватернион с противоположной по знаку мнимой частью.
Посчитаем
Теперь выпишем отдельные компоненты и из этого произведения соберем новый кватернион
Посчитаем оставшуюся часть, т.е. и получим искомый вектор.
Примечание. Чтобы не загромождать вычисления, приведем только мнимую(векторную) часть этого произведения. Ведь именно она характеризует искомый вектор.
Соберем компоненты вектора
Таким образом необходимый вектор получен
Напишем код:
Зная как вращать вектор кватернионом, не составит труда найти все вершины куба.
Перейдем к функцию нахождении вершин куба. Определим базовые переменные.
Далее необходимо найти такую точку(опорную точку), от которой будет легче всего найти другие вершины.
Из центра покоординатно вычитаем половину размерности куба.Потом к опорной точке прибавляем по одной размерности куба.
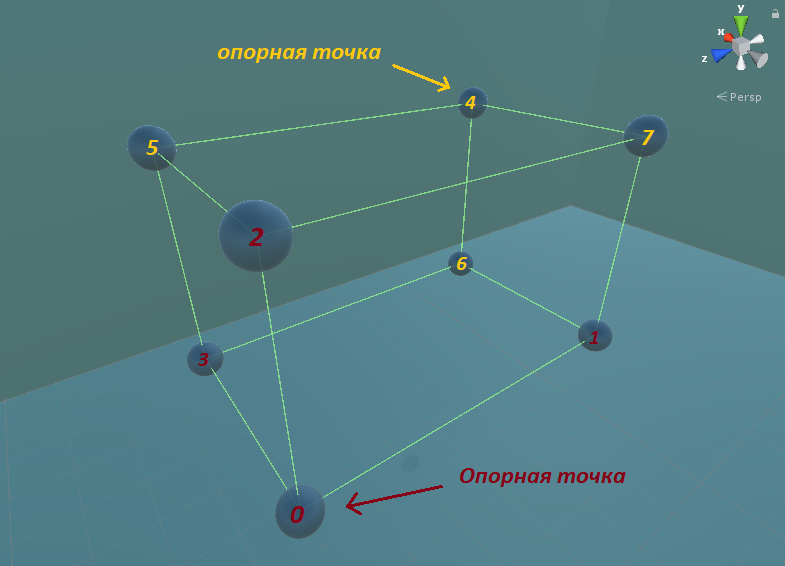
Можем видеть, как сформированы точки
После нахождения координат вершин, необходимо повернуть каждый вектор на соответствующий кватернион.
Перейдем к проекциям.
Следующим шагом необходимо найти множество осей, претендующих на разделяющую.
Вспомним, что ее можно найти в следующих множествах:
Для того, чтобы получить необходимые оси, достаточно иметь четыре вершины куба, которые формируют ортогональную систему векторов. Эти вершины находятся в первых четырех ячейках массива точек, которые мы сформировали во втором акте.

Необходимо найти нормали плоскостей, порожденные векторами:
Для этого надо перебрать пары ребер куба так, чтобы каждая новая выборка образовывала плоскость, ортогональную всем предыдущим полученным плоскостям. Для меня невероятно тяжело было объяснить как это работает, поэтому я предоставил два варианта кода, которые помогут понять.
Но можно сделать проще:
Еще мы должны найти все векторные произведения ребер кубов. Это можно организовать простым перебором:
Мы подошли к самому главному моменту. Здесь мы должны найти проекции кубов на все потенциальные разделяющие оси. У теоремы есть одно важное следствие: если объекты пересекаются, то ось на которую величины пересечения проекции кубов минимальна — является направлением(нормалью) коллизии, а длинна отрезка пересечения — глубиной проникновения.
Но для начала напомним формулу скалярной проекции вектора v на единичный вектор a:
Теперь опишем функцию, которая будет определять пересечение проекций на оси-кандидаты.
На вход подаем вершины двух кубов, и список потенциальных разделяющих осей:
Проекция на ось задается двумя точками, которые имеют максимальные и минимальные значения на самой оси:
Далее создаем функцию, которая возвращает проекционные точки каждого куба. Она принимает два возвращаемых параметра, массив вершин и потенциальную разделяющую ось.
Итого, применив данную функцию( ProjAxis ), получим проекционные точки каждого куба.
Далее, на основе проекционных вершин определяем пересечение проекций:
Для этого давайте поместим наши точки в массив и отсортируем его, такой способ поможет нам определить не только пересечение, но и глубину пересечения.
Заметим следующее свойство:
1) Если отрезки не пересекаются, то сумма отрезков будет меньше, чем отрезок сформированными крайними точками:

2) Если отрезки пересекаются, то сумма отрезков будет больше, чем отрезок сформированными крайними точками:
Вот таким простым условием мы проверили пересечение и непересечение отрезков.
Если пересечения нет, то глубина пересечения будет равна нулю:
Таким образом, нам достаточно иметь хоть один вектор, на котором проекции кубов не пересекаются, тогда и сами кубы не пересекаются. Поэтому, когда мы найдем разделяющую ось, мы сможем не проверять оставшееся вектора, и завершить работу алгоритма.
В случае пересечения кубов, все немного интереснее: проекции кубов на все вектора будет пересекаться, и мы должны определить вектор с минимальным пересечением.
Создадим этот вектор перед циклом, и будем хранить в нем вектор с минимальной длинной. Тем самым в конце работы цикла получим искомый вектор.
И каждый раз, когда мы находим ось, на которой проекции пересекаются, проверяем является ли она минимальной по длине среди всех. такую ось умножаем на длину пересечения, и результатом будет искомая нормаль(направление) пересечения кубов.
Так же я добавил определение ориентации нормали по отношению первого куба.
Проект с реализацией и примером загружен на GitHub, и ознакомиться можно с ним здесь.
Моей целью было поделиться своим опытом в решение задач связанных с определением пересечений двух выпуклых объектов. А так же доступно и понятно рассказать о данной теореме.
способные выполнять миллионы операций в секунду. И естественно не обойтись без симуляции реального или игрового мира. Одна из задач компьютерного моделирования и симуляции состоит в определении столкновения двух объектов, одно из решений которой реализуется теоремой о разделяющей оси.
Примечание. В статье будет приведен пример с 2 параллелепипедами(далее — кубы), но идея для других выпуклых объектов будет сохранена.
Примечание. Вся реализация будет выполнена в Unity.
Акт 0. Общая теория
Для начала нужно познакомиться с "теоремой о разделяющей гиперплоскости".Именно она будет лежать в основе алгоритма.
Теорема. Две выпуклые геометрии не пересекаются, тогда и только тогда, когда между ними существует гиперплоскость, которая их разделяет. Ось ортогональная разделяющей
гиперплоскости называется разделяющей осью, а проекции фигур на нее не пересекаются.
Разделяющая ось (двумерный случай)
Разделяющая ось (трехмерный случай)
Можно заметить, что проекции на разделяющую ось не пересекаются.
Свойство. Потенциальная разделяющая ось будет находиться в следующих множествах:
- Нормы плоскостей каждого куба(красные)
- Векторное произведение ребер кубов ,
где X — ребра первого куба (зеленые), а Y — второго (синие).
Каждый куб мы можем описать следующими входными данными:
- Координаты центра куба
- Размеры куба (высота, ширина, глубина)
- Кватернион куба
Создадим для этого дополнительный класс, экземпляры которого будут предоставлять информацию о кубе.
public class Box
{
public Vector3 Center;
public Vector3 Size;
public Quaternion Quaternion;
public Box(Vector3 center, Vector3 size, Quaternion quaternion)
{
this.Center = center;
this.Size = size;
this.Quaternion = quaternion;
}
// дополнительный конструктор, который
// позволяет сгенерировать объект на основе GameObject
public Box(GameObject obj)
{
Center = obj.transform.position;
Size = obj.transform.lossyScale;
Quaternion = obj.transform.rotation;
}
}
Акт 1. Кватернионы
Как часто бывает, объект может вращаться в пространстве. Для того, чтобы найти координаты вершин, с учетом вращения куба, необходимо понять, что такое кватернион.
Кватернион — это гиперкомплексное число, которое определяет вращение объекта в пространстве.
Мнимая часть(x,y,z) представляет вектор, который определяет направление вращения
Вещественная часть(w) определяет угол, на который будет совершено вращение.
Его основное отличие от всем привычных углов Эйлера в том, что нам достаточно иметь один вектор, который будет определять направление вращения, чем три линейно независимых вектора, которые вращают объект в 3 подпространствах.
Рекомендую две статьи, в которых подробно рассказывается о кватернионах:
Раз
Два
Теперь, когда у нас есть минимальные представления о кватернионах, давайте поймем, как вращать вектор, и опишем функцию вращение вектора кватернионом.
Формула вращения вектора
— искомый вектор
— исходный вектор
— кватернион
— обратный кватернион
Для начала, дадим понятие обратного кватерниона в ортонормированном базисе — это кватернион с противоположной по знаку мнимой частью.
Посчитаем
Теперь выпишем отдельные компоненты и из этого произведения соберем новый кватернион
Посчитаем оставшуюся часть, т.е. и получим искомый вектор.
Примечание. Чтобы не загромождать вычисления, приведем только мнимую(векторную) часть этого произведения. Ведь именно она характеризует искомый вектор.
Соберем компоненты вектора
Таким образом необходимый вектор получен
Напишем код:
private static Vector3 QuanRotation(Vector3 v,Quaternion q)
{
float u0 = v.x * q.x + v.y * q.y + v.z * q.z;
float u1 = v.x * q.w - v.y * q.z + v.z * q.y;
float u2 = v.x * q.z + v.y * q.w - v.z * q.x;
float u3 = -v.x * q.y + v.y * q.x + v.z * q.w;
Quaternion M = new Quaternion(u1,u2,u3,u0);
Vector3 resultVector;
resultVector.x = q.w * M.x + q.x * M.w + q.y * M.z - q.z * M.y;
resultVector.y = q.w * M.y - q.x * M.z + q.y * M.w + q.z * M.x;
resultVector.z = q.w * M.z + q.x * M.y - q.y * M.x + q.z * M.w;
return resultVector;
}
Акт 2. Нахождение вершин куба
Зная как вращать вектор кватернионом, не составит труда найти все вершины куба.
Перейдем к функцию нахождении вершин куба. Определим базовые переменные.
private static Vector3[] GetPoint(Box box)
{
//Тут будут храниться координаты вершин
Vector3[] point = new Vector3[8];
//получаем координаты
//....
return point;
}
Далее необходимо найти такую точку(опорную точку), от которой будет легче всего найти другие вершины.
Из центра покоординатно вычитаем половину размерности куба.Потом к опорной точке прибавляем по одной размерности куба.
//...
//первые четыре вершины
point[0] = box.Center - box.Size/2;
point[1] = point[0] + new Vector3(box.Size.x , 0, 0);
point[2] = point[0] + new Vector3(0, box.Size.y, 0);
point[3] = point[0] + new Vector3(0, 0, box.Size.z);
//таким же образом находим оставшееся точки
point[4] = box.Center + box.Size / 2;
point[5] = point[4] - new Vector3(box.Size.x, 0, 0);
point[6] = point[4] - new Vector3(0, box.Size.y, 0);
point[7] = point[4] - new Vector3(0, 0, box.Size.z);
//...
Можем видеть, как сформированы точки
После нахождения координат вершин, необходимо повернуть каждый вектор на соответствующий кватернион.
//...
for (int i = 0; i < 8; i++)
{
point[i] -= box.Center;//перенос центра в начало координат
point[i] = QuanRotation(point[i], box.Quaternion);//поворот
point[i] += box.Center;//обратный перенос
}
//...
полный код получения вершин
private static Vector3[] GetPoint(Box box)
{
Vector3[] point = new Vector3[8];
//получаем координаты вершин
point[0] = box.Center - box.Size/2;
point[1] = point[0] + new Vector3(box.Size.x , 0, 0);
point[2] = point[0] + new Vector3(0, box.Size.y, 0);
point[3] = point[0] + new Vector3(0, 0, box.Size.z);
//таким же образом находим оставшееся точки
point[4] = box.Center + box.Size / 2;
point[5] = point[4] - new Vector3(box.Size.x, 0, 0);
point[6] = point[4] - new Vector3(0, box.Size.y, 0);
point[7] = point[4] - new Vector3(0, 0, box.Size.z);
//поворачиваем вершины кватернионом
for (int i = 0; i < 8; i++)
{
point[i] -= box.Center;//перенос центра в начало координат
point[i] = QuanRotation(point[i], box.Quaternion);//поворот
point[i] += box.Center;//обратный перенос
}
return point;
}
Перейдем к проекциям.
Акт 3. Поиск разделяющих осей
Следующим шагом необходимо найти множество осей, претендующих на разделяющую.
Вспомним, что ее можно найти в следующих множествах:
- Нормали плоскостей каждого куба(красные)
- Векторное произведение ребер кубов , где X — ребра первого куба (зеленые), а Y — второго (синие).
Для того, чтобы получить необходимые оси, достаточно иметь четыре вершины куба, которые формируют ортогональную систему векторов. Эти вершины находятся в первых четырех ячейках массива точек, которые мы сформировали во втором акте.
Необходимо найти нормали плоскостей, порожденные векторами:
- и
- и
- и
Для этого надо перебрать пары ребер куба так, чтобы каждая новая выборка образовывала плоскость, ортогональную всем предыдущим полученным плоскостям. Для меня невероятно тяжело было объяснить как это работает, поэтому я предоставил два варианта кода, которые помогут понять.
такой код позволяет получить эти вектора и найти нормали к плоскостям для двух кубов(понятный вариант)
private static List<Vector3> GetAxis(Vector3[] a, Vector3[] b)
{
//ребра
Vector3 A;
Vector3 B;
//потенциальные разделяющие оси
List<Vector3> Axis = new List<Vector3>();
//нормали плоскостей первого куба
A = a[1] - a[0];
B = a[2] - a[0];
Axis.Add(Vector3.Cross(A,B).normalized);
A = a[2] - a[0];
B = a[3] - a[0];
Axis.Add(Vector3.Cross(A,B).normalized);
A = a[1] - a[0];
B = a[3] - a[0];
Axis.Add(Vector3.Cross(A,B).normalized);
//нормали второго куба
A = b[1] - b[0];
B = b[2] - b[0];
Axis.Add(Vector3.Cross(A,B).normalized);
A = b[1] - b[0];
B = b[3] - b[0];
Axis.Add(Vector3.Cross(A,B).normalized);
A = b[2] - b[0];
B = b[3] - b[0];
Axis.Add(Vector3.Cross(A,B).normalized);
//...
}
Но можно сделать проще:
private static List<Vector3> GetAxis(Vector3[] a, Vector3[] b)
{
//ребра
Vector3 A;
Vector3 B;
//потенциальные разделяющие оси
List<Vector3> Axis = new List<Vector3>();
//нормали плоскостей первого куба
for (int i = 1; i < 4; i++)
{
A = a[i] - a[0];
B = a[(i+1)%3+1] - a[0];
Axis.Add(Vector3.Cross(A,B).normalized);
}
//нормали второго куба
for (int i = 1; i < 4; i++)
{
A = b[i] - b[0];
B = b[(i+1)%3+1] - b[0];
Axis.Add(Vector3.Cross(A,B).normalized);
}
//...
}
Еще мы должны найти все векторные произведения ребер кубов. Это можно организовать простым перебором:
private static List<Vector3> GetAxis(Vector3[] a, Vector3[] b)
{
//...
//получение нормалей
//...
//Теперь добавляем все векторные произведения
for (int i = 1; i < 4; i++)
{
A = a[i] - a[0];
for (int j = 1; j < 4; j++)
{
B = b[j] - b[0];
if (Vector3.Cross(A,B).magnitude != 0)
{
Axis.Add(Vector3.Cross(A,B).normalized);
}
}
}
return Axis;
}
Полный код
private static List<Vector3> GetAxis(Vector3[] a, Vector3[] b)
{
//ребра
Vector3 A;
Vector3 B;
//потенциальные разделяющие оси
List<Vector3> Axis = new List<Vector3>();
//нормали плоскостей первого куба
for (int i = 1; i < 4; i++)
{
A = a[i] - a[0];
B = a[(i+1)%3+1] - a[0];
Axis.Add(Vector3.Cross(A,B).normalized);
}
//нормали второго куба
for (int i = 1; i < 4; i++)
{
A = b[i] - b[0];
B = b[(i+1)%3+1] - b[0];
Axis.Add(Vector3.Cross(A,B).normalized);
}
//Теперь добавляем все векторные произведения
for (int i = 1; i < 4; i++)
{
A = a[i] - a[0];
for (int j = 1; j < 4; j++)
{
B = b[j] - b[0];
if (Vector3.Cross(A,B).magnitude != 0)
{
Axis.Add(Vector3.Cross(A,B).normalized);
}
}
}
return Axis;
}
Акт 4. Проекции на оси
Мы подошли к самому главному моменту. Здесь мы должны найти проекции кубов на все потенциальные разделяющие оси. У теоремы есть одно важное следствие: если объекты пересекаются, то ось на которую величины пересечения проекции кубов минимальна — является направлением(нормалью) коллизии, а длинна отрезка пересечения — глубиной проникновения.
Но для начала напомним формулу скалярной проекции вектора v на единичный вектор a:
private static float ProjVector3(Vector3 v, Vector3 a)
{
a = a.normalized;
return Vector3.Dot(v, a) / a.magnitude;
}
Теперь опишем функцию, которая будет определять пересечение проекций на оси-кандидаты.
На вход подаем вершины двух кубов, и список потенциальных разделяющих осей:
private static Vector3 IntersectionOfProj(Vector3[] a, Vector3[] b, List<Vector3> Axis)
{
for (int j = 0; j < Axis.Count; j++)
{
//в этом цикле проверяем каждую ось
//будем определять пересечение проекций на разделяющие оси из списка кандидатов
}
//Если мы в цикле не нашли разделяющие оси, то кубы пересекаются, и нам нужно
//определить глубину и нормаль пересечения.
}
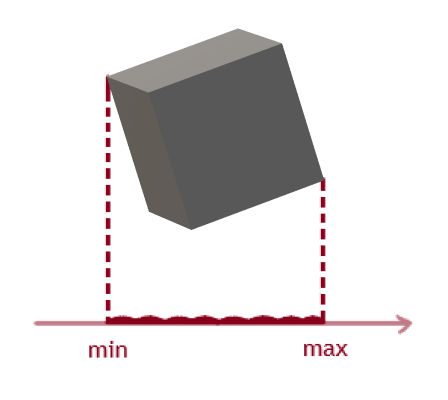
Проекция на ось задается двумя точками, которые имеют максимальные и минимальные значения на самой оси:
Далее создаем функцию, которая возвращает проекционные точки каждого куба. Она принимает два возвращаемых параметра, массив вершин и потенциальную разделяющую ось.
private static void ProjAxis(out float min, out float max, Vector3[] points, Vector3 Axis)
{
max = ProjVector3(points[0], Axis);
min = ProjVector3(points[0], Axis);
for (int i = 1; i < points.Length; i++)
{
float tmp = ProjVector3(points[i], Axis);
if (tmp > max)
{
max = tmp;
}
if (tmp < min)
{
min= tmp;
}
}
}
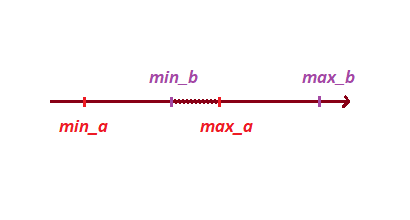
Итого, применив данную функцию( ProjAxis ), получим проекционные точки каждого куба.
private static Vector3 IntersectionOfProj(Vector3[] a, Vector3[] b, List<Vector3> Axis)
{
for (int j = 0; j < Axis.Count; j++)
{
//проекции куба a
float max_a;
float min_a;
ProjAxis(out min_a,out max_a,a,Axis[j]);
//проекции куба b
float max_b;
float min_b;
ProjAxis(out min_b,out max_b,b,Axis[j]);
//...
}
//...
}
Далее, на основе проекционных вершин определяем пересечение проекций:
Для этого давайте поместим наши точки в массив и отсортируем его, такой способ поможет нам определить не только пересечение, но и глубину пересечения.
float[] points = {min_a, max_a, min_b, max_b};
Array.Sort(points);
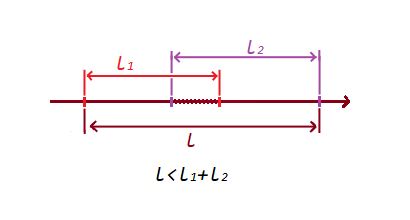
Заметим следующее свойство:
1) Если отрезки не пересекаются, то сумма отрезков будет меньше, чем отрезок сформированными крайними точками:
2) Если отрезки пересекаются, то сумма отрезков будет больше, чем отрезок сформированными крайними точками:
Вот таким простым условием мы проверили пересечение и непересечение отрезков.
Если пересечения нет, то глубина пересечения будет равна нулю:
//...
//Сумма отрезков
float sum = (max_b - min_b) + (max_a - min_a);
//Длина крайних точек
float len = Math.Abs(p[3] - p[0]);
if (sum <= len)
{
//разделяющая ось существует
// объекты непересекаются
return Vector3.zero;
}
//Предполагаем, что кубы пересекаются и рассматриваем текущую ось далее
//....
Таким образом, нам достаточно иметь хоть один вектор, на котором проекции кубов не пересекаются, тогда и сами кубы не пересекаются. Поэтому, когда мы найдем разделяющую ось, мы сможем не проверять оставшееся вектора, и завершить работу алгоритма.
В случае пересечения кубов, все немного интереснее: проекции кубов на все вектора будет пересекаться, и мы должны определить вектор с минимальным пересечением.
Создадим этот вектор перед циклом, и будем хранить в нем вектор с минимальной длинной. Тем самым в конце работы цикла получим искомый вектор.
private static Vector3 IntersectionOfProj(Vector3[] a, Vector3[] b, List<Vector3> Axis)
{
Vector3 norm = new Vector3(10000,10000,10000);
for (int j = 0; j < Axis.Count; j++)
{
//...
}
//в случае, когда нашелся вектор с минимальным пересечением, возвращаем его
return norm;
{
И каждый раз, когда мы находим ось, на которой проекции пересекаются, проверяем является ли она минимальной по длине среди всех. такую ось умножаем на длину пересечения, и результатом будет искомая нормаль(направление) пересечения кубов.
Так же я добавил определение ориентации нормали по отношению первого куба.
//...
if (sum <= len)
{
//разделяющая ось существует
// объекты не пересекаются
return new Vector3(0,0,0);
}
//Предполагаем, что кубы пересекаются и рассматриваем текущий вектор далее
//пересечение проекций - это расстояние между 2 и 1 элементом в нашем массиве
//(см. рисунок на котором изображен случай пересечения отрезков)
float dl = Math.Abs(points[2] - points[1]);
if (dl < norm.magnitude)
{
norm = Axis[j] * dl;
//ориентация нормали
if(points[0] != min_a)
norm = -norm;
}
//...
Весь код
private static Vector3 IntersectionOfProj(Vector3[] a, Vector3[] b, List<Vector3> Axis)
{
Vector3 norm = new Vector3(10000,10000,10000);
for (int j = 0; j < Axis.Count; j++)
{
//проекции куба a
float max_a;
float min_a;
ProjAxis(out min_a,out max_a,a,Axis[j]);
//проекции куба b
float max_b;
float min_b;
ProjAxis(out min_b,out max_b,b,Axis[j]);
float[] points = {min_a, max_a, min_b, max_b};
Array.Sort(points);
float sum = (max_b - min_b) + (max_a - min_a);
float len = Math.Abs(points[3] - points[0]);
if (sum <= len)
{
//разделяющая ось существует
// объекты не пересекаются
return new Vector3(0,0,0);
}
float dl = Math.Abs(points[2] - points[1]);
if (dl < norm.magnitude)
{
norm = Axis[j] * dl;
//ориентация нормы
if(points[0] != min_a)
norm = -norm;
}
}
return norm;
}
Заключение
Проект с реализацией и примером загружен на GitHub, и ознакомиться можно с ним здесь.
Моей целью было поделиться своим опытом в решение задач связанных с определением пересечений двух выпуклых объектов. А так же доступно и понятно рассказать о данной теореме.




maisvendoo
Теорема сформулирована, а где доказательство?