
Ссылка на первоисточник — здесь больше порядка с оформлением, особенно, для видеороликов.
Содержание
- Введение
- Ничего необычного: один из лучших центров робототехники в мире
- Оберпфаффенхофен
- Это космос!
- LWR — один из первых коллаборативных роботов
- За чей счёт этот банкет?
- Заключение
Введение
Здесь мы расскажем о Центре робототехники и мехатроники (Robotics and Mechatronics Center, RMC) Национального центра авиации и космонавтики Германии. На языке оригинала всё это звучит вот так: Robotik und Mechatronik Zentrum (аббревиатура используется английская, RMC) и Deutsches Zentrum fur Luft- und Raumfahrt (аббревиатура используется немецкая, DLR).

Данный материал родился потому, что возникла идея поделиться тем, что я видел и слышал лично. Просто так, не имея собственного очного впечатления, собрать в кучу всю эту информацию было бы сложнее. Думаю, это должно быть интересно не только мне.
Статья получилась такой большой, что пришлось разбить её на две части: первая (настоящая) — почти популярная, а вторая — почти научная. Надеюсь, полезными окажутся обе.
Сразу оговоримся, что речь пойдёт об Институте робототехники и мехатроники RMC, расположенном в посёлке Оберпфаффенхофен под Мюнхеном. На данный момент Центр включает 3 института (кроме упомянутого, ещё есть Институт динамики систем и управления и Институт оптических сенсорных систем), но основной интерес для нас представляет именно первый.
Ничего необычного: один из лучших центров робототехники в мире
Сегодня RMC — это один из многочисленных центров робототехники в мире. Один из. Со своими многочисленными разработками, представленными на официальном сайте RMC [1] и в отличном 3d-туре, доступном с того же сайта. Разработками, которые, как бы, есть у всех центров робототехники. То есть для человека непосвящённого это, как говорят, «ничего необычного». Или, если ещё проще, «так и дурак может».
Нет, дурак не может, и далеко не всякий умный сможет тоже. Не претендуя на исчерпывающее описание всех разработок Центра, расскажем о том, чем RMC прославился в области робототехники. В частности, об интересном подходе к построению робототехнических систем, позволившем учёным и инженерам RMC добиться тех результатов, которые мы можем наблюдать сегодня. Он применён для многих роботов Центра, ставших широко известными, причём не только в робототехническом сообществе.
Ранее в статье о Boston Dynamics мы говорили о другом подходе, связанном с учётом гибких свойств звеньев роботов и даже с преднамеренным построением упругого привода (series elastic actuator). Этот подход разрабатывался в альтернативу традиционному способу конструирования промышленных манипуляторов: «чем жёстче, тем лучше». Здесь же обсудим (а во второй части статьи попробуем ещё и слегка разоблачить) так называемое управление механическим импедансом (impedance control).
LBR iiwa: управление механическим импедансом [2]
Управление механическим импедансом [3], говоря простыми словами, наделяет манипулятор свойствами системы пружина – демпфер с регулируемыми по произвольному закону и по произвольным координатам жёсткостью и коэффициентом демпфирования. И, как мы увидим далее, в RMC были разработаны алгоритмы управления механическим импедансом применительно к существенно гибким манипуляторам. Таким образом, подход RMC в каком-то смысле можно считать следующей ступенью в развитии методов построения и управления нежёсткими механизмами, по сравнению с подходом, упомянутым в предыдущем абзаце.
А вообще-то, RMC не настолько известен широкой публике, как та же Boston Dynamics. Тем не менее, я уверен, что вы наверняка знаете разработки Центра, если хоть сколько-то интересуетесь робототехникой. А вот каким образом эти разработки связаны с космосом, понять можно было бы не сразу. Расскажем и об этом.
По совокупности, лично я считаю, что центров робототехники такого уровня, как DLR RMC, не так уж и много во всём мире.
Оберпфаффенхофен
Моё непосредственное знакомство с RMC состоялось в 2009 г. В тот период сотрудники RMC и ЦНИИ РТК активно обменивались рабочими поездками в рамках совместных проектов. Причём немецкие коллеги охотно и с техническими деталями рассказывали о своих робототехнических достижениях, благо было о чём рассказать. Демонстрировали антропоморфного робота Rollin’ Justin и отдельно манипулятор LWR III, разработанный в RMC и использующийся в качестве «рук» Justin'а. Да, этот манипулятор со знакомыми очертаниями, который в 2004 г. в рамках кооперации был передан [4] компании KUKA и в дальнейшем дорабатывался до LBR 4, LBR 4+, LBR iiwa и LBR iisy, — это «выходец» из DLR RMC.
2012 г. Слева, понятно, — Герд Хирцингер. Демонстрирует манипулятор DLR LWR III какой-то тётеньке [5]
В то время, когда в RMC создавали первые модели LWR, ещё никто не знал ни про каких коллаборативных роботов (так называемых «коботов»), да и в 2009 г. этот термин ещё не вошёл в моду. Это теперь коллаборативных роботов можно встретить во всех каталогах топовых производителей промышленных манипуляторов. А инженеры из RMC, разрабатывая для своих целей очувствлённые по усилию манипуляторы, оказались в числе первопроходцев в этом направлении.
Ну, а тогда, в 2009 г., мы как робототехники находились под большим впечатлением от выставочных трюков, подготовленных в RMC для таких случаев. Запомнилась демонстрация чувствительности и быстродействия системы управления манипулятора LWR (или, по-немецки, LBR), который зажатым в схвате металлическим блином (теперь что-то я не совсем уверен, но тогда запомнил, что это был именно металлический плоский блин) с размаху лупил плашмя прямо по специально подставленному лбу мужественного сотрудника Центра. Заканчивалось всё шлепком и довольным хохотом этого сотрудника, которому в очередной раз повезло выжить: манипулятор мгновенно останавливался, почувствовав усилие от касания блина о лоб.
Примерно вот так. KUKA LBR — режим обнаружения головы [6]. И это, кстати, уже другой смельчак.
Не меньшее восхищение вызывал и робот Justin, который умудрялся ловить брошенный человеком теннисный мяч, прямо в полёте просчитывая его траекторию, наблюдаемую при помощи камер стереопары. И даже два мяча одновременно.
А ещё два робота Justin, которые перебрасывались этим мячом между собой.
Justin швыряется мячом. Баскетбольный бы ему! [7] [8]
Большую радость у аудитории традиционно вызывает робот, который что-нибудь наливает. Да, это не только русская забава, немцам она тоже оказалась не чужда. Вот и Justin в качестве одного из своих самых известных трюков насыпал в стакан и разбавлял водой растворимый кофе. Вишенкой на этом торте было постукивание пальцем по банке с кофе для максимального «вау-эффекта».
Когда заваривают кофе, видимо, все сразу вспоминают фильм «Криминальное чтиво». Кофе, приготовленный роботом, — это ведь тоже «кофе для гурмана»! Теперь главное, чтобы до стрельбы не дошло [9]
Конечно, мы прекрасно понимали, что движения Justin'а-буфетчика жёстко запрограммированы, как для всем известных «танцев роботов». Да и сотрудники RMC этого не скрывали, прямо отвечая на наши вопросы. О том, что стакан и графин должны быть именно такой формы, графин должен содержать ровно столько воды, а в банке должно быть насыпано ровно столько кофе. Но «вау-эффект» всё равно был достигнут: мы бы сделать такого робота не могли (и, напомню, до появления робота Atlas было ещё несколько лет).
Потому что Justin использовал много элементов и решений, которые и сами по себе были прогрессивны и по-немецки отлично-педантично исполнены, и в совокупности работали эффектно. Это касается и минималистичной компоновки лёгких манипуляторов, оформленных красивыми округлыми корпусами; и электродвигаталей собственной разработки RMC, о которых ещё скажем ниже; и управления с использованием обратной связи с датчиков усилия / момента, в том числе, и в пальцах схвата; и системы технического зрения.
Что до этого небольшого «игрушечного» посёлка с никому не известным названием… Опер-поппер-хоппер… Овен-ваффен-маффин… Тьфу! О-бер-пфаф-фен-хо-фен (Oberpfaffenhofen), вот!.. То, как мы убедились, это вполне обыденная для Германии ситуация, когда научно-технический центр с мировым именем располагается в каком-нибудь захолустном провинциальном городке или даже посёлке. Хотя при этом если всего-то и надо проехать с полчаса от миллионника-Мюнхена на аккуратном, чистеньком и плавном поезде S-Bahn (что-то среднее между трамвайчиком и электричкой) — разве это расстояние?

Современное здание RMC в Оберпфаффенхофене
Ох уж эти немецкие слова! Zweihundertsiebenundachtzig (двести восемьдесят семь). Dampfschiffahrtsgesellschaft (пароходная компания)! Rindfleischetikettierungsuberwachungsaufgabenubertragungsgesetz (закон о передаче обязанностей по контролю маркировки говядины)!!! Хотя, при некоторой тренировке, к ним привыкаешь и начинаешь их понимать.
И вообще, мне нравится немецкий язык. В жизни он оказался совсем не таким, каким мы привыкли его считать (видимо, сказываются некоторые специфические поводы, по которым нам в России доводилось слышать немецкую речь). «Wir sind die braunen Soldaten» [10], «Jawohl!», «Hande hoch!» — нет, не таким. «Du! Du hast! Du hast mich!» [11] — и не таким. «Oh, ja, ja, das ist fantastisch!» [12] — и даже не таким. Нет, немецкая речь в повседневной жизни — в общении на профессиональные темы, на летних городских улицах, в транспорте, в магазинах и на рождественских ярмарках — она совсем другая: мягкая, бархатно-грассирующая и уютная, как маленькие частные немецкие домики с аккуратно стрижеными газонами. И для моего слуха она гораздо приятнее привычно-безразлично улыбающегося, угловатого, лающего английского. Впрочем, это мои личные ассоциации, не настаиваю. Но мы отвлеклись. Давайте вернёмся к нашим роботам.

Рождественский базар в Мюнхене (Мариенплац). Фото тоже не моё, просто красивое!
Это космос!
И всё же DLR RMC — это центр космической робототехники. А на Землю они спустились несколько позже.
Интересующая нас история начинается с космического эксперимента ROTEX [13] (RObot TEchnology eXperiment), который был подготовлен DLR RMC в 1988 – 1993 гг. и проведён в рамках миссии STS-55 на борту американского космического челнока «Колумбия» в апреле – мае 1993 г.

Обзор наземной подготовки миссии STS-55 (D-2): эксперимент ROTEX [14]
Целью эксперимента ROTEX была отработка робототехнических технологий для будущих роботизированных космических миссий. Эксперимент был интересен тем, что европейский манипулятор впервые поработал в космосе, на борту космического аппарата (КА), а также тем, что в этом манипуляторе были собраны, наверное, все доступные на тот момент технологии сенсорного очувствления роботов:
- два 6-осевых датчика сил и моментов в «запястье» манипулятора (один на тензометрических, а второй на оптических чувствительных элементах);
- матрицы тактильных датчиков для управления усилием захвата;
- массив из 9 лазерных дальномеров;
- стереопара для получения изображения со схвата;
- стереопара для получения изображения рабочей области робота.

Модель короба с манипулятором, расположенного внутри корабля

Схват манипулятора при выполнении действий в рамках эксперимента
В ходе эксперимента робот выполнил следующие тестовые задачи:
- сборка механической решётчатой конструкции;
- отключение-подключение орбитального сменного блока (Orbital Replaceable Unit, ORU) с байонетным разъёмом;
- и самое интересное — автоматический захват летящего объекта, демонстрирующий в первом (пожалуй, даже нулевом) приближении возможность захвата свободно вращающихся спутников в космосе с целью их технического обслуживания на орбите в будущем.

ROTEX: разъединение байонетного разъёма; захват свободно летящего объекта (вид с камеры схвата)
Были опробованы следующие режимы управления:
- автоматический по программе, заложенной с Земли;
- телеуправление астронавтом с борта корабля по стереоизображению на ТВ-мониторе;
- телеуправление с Земли с использованием упреждающей компьютерной симуляции движения робота, учитывающей 5 – 7-секундную задержку в линиях связи;
- дистанционное программирование методом демонстрации движения на Земле, где было полностью смоделировано окружение манипулятора, при помощи сенсорного восприятия на Земле и воспроизведения движения на борту.

Астронавт, управляющий манипулятором с борта космического корабля

Управление манипулятором из наземного пункта управления
Эксперимент завершился полным успехом. Однако одновременно. в ходе его подготовки выявилась потребность в наземном роботе, сходном с орбитальным, для тренировки астронавтов [15]. Но существовавшие в то время манипуляторы были либо слишком большими и тяжёлыми (см. выше иллюстрацию о наземной подготовке миссии), либо недостаточно мощными для выполнения требуемых задач в условиях земной гравитации. Таким образом, понадобилось разработать небольшой легковесный манипулятор, стремясь к соотношению собственного веса и грузоподъёмности 1:1, как у человеческой руки, при похожей функциональности. Это и стало предпосылкой к созданию LWR, о котором расскажем чуть позже.
В дальнейшем теме орбитального обслуживания космических аппаратов был посвящён целый ряд проектов в RMC. Например, проект ESS [16] (Experimental Servicing Satellite) предполагал лабораторную наземную отработку захвата свободно летящего КА. Захват предполагалось осуществлять за сопло ракетного двигателя обслуживаемого КА. Лабораторный стенд был создан на базе двух манипуляторов KUKA, один из которых выполнял захват, а второй имитировал взаимную динамику обслуживающего и обслуживаемого КА в условиях космоса, с учётом их контактного взаимодействия в момент захвата.

ESS: захват КА за сопло двигателя — стенд с макетами
Значимым шагом для RMC стал космический эксперимент ROKVISS [17] [18] (RObot Komponent Verification on ISS). В рамках этого эксперимента небольшой двухстепенной манипулятор с наконечником в виде металлического щупа был установлен на наружной поверхности российского модуля МКС «Звезда», где в течение более чем 5 лет (с начала 2005 г. по конец 2010 г.) он выполнял различные тестовые задания.

Аппаратура для космического эксперимента ROKVISS на российском модуле МКС «Звезда»
Эти задания заключались в том, чтобы при помощи щупа выполнять контактные операции с расположенной рядом с манипулятором металлической рамкой, имеющей сложную форму с изогнутыми линиями, например: прижать щуп к рамке и, не теряя механического контакта, провести щуп вдоль изогнутого края; ударить щупом по рамке; растянуть пружину. Оператор в реальном времени наблюдал за совершаемыми операциями при помощи пересылаемого стереоизображения, а рукой ощущал на рукоятке управления, оснащённой приводами, возникающие на рабочем органе робота усилия. За счёт этого создавался эффект телеприсутствия для оператора.

Манипулятор и фигурная рамка с пружинами для эксперимента ROKVISS
В эксперименте были решены сразу несколько задач. Обобщая, выделим две главные, состоящие из самостоятельных частных. Во-первых, была подтверждена возможность применения новых технологий и компонентов, разработанных Центром для своего легковесного робота, в реальных условиях открытого космического пространства. Во-вторых, проверялась осуществимость непосредственного дистанционного управления манипулятором с обеспечением эффекта телеприсутствия для обслуживания космических спутников в будущем.
Масштаб проведённых работ заслуживает более детального обсуждения, хотя бы вкратце. Одной из ключевых идей данного проекта был уход от применения дорогих и габаритных радиационно стойких компонентов (в космическом исполнении). И это удалось сделать. Как? Немного о специфике. Упрощённо говоря, космическое ионизирующее излучение может приводить к возникновению в электронных компонентах радиационных эффектов двух видов: дозовые, вызывающие дрейф их характеристик и, в конечном итоге (при превышении предельной дозы), отказ; и одиночные, связанные с воздействием одиночных высокоэнергетических частиц, вызывающие либо отказ с выгоранием схем (разрушающие эффекты), либо единичный сбой в элементах памяти (неразрушающие эффекты). От чрезмерной дозы на низких орбитах (а орбита МКС — это низкая орбита) хорошо защищают и пояса Ван Аллена. По крайней мере, коммерческие микросхемы, типовая дозовая стойкость которых составляет 5 крад и более, вполне способны выдержать несколько лет на низкой орбите, что подтвердилось и в случае с ROKVISS. А для защиты от одиночных эффектов были применены схема контроля тока со сбросом питания при превышении нормы (защита от так называемого тиристорного защёлкивания) и программная проверка с коррекцией ошибок в элементах памяти. И хотя эти меры не гарантируют на 100% полную защиту от зловредного воздействия космической радиации на электронику, но эффекты, от которых они не защищают, к счастью, редки. А вот пара случаев срабатывания защиты со сбросом питания и перезагрузкой, по информации от сотрудников RMC, за всё проведённое на орбите время имела место, и ROKVISS выжил.
Мы не можем уделить здесь много внимания обсуждению вопросов защиты электроники от космического ионизирующего излучения, зато есть хороший человек, который уделил [19].
Инженерами RMC было принято во внимание также и влияние других факторов, действующих в космосе. Электроника подбиралась исходя из требования расширенного рабочего диапазона температур: -45 °C ... +85 °C. Учитывая отсутствие в вакууме естественного конвекционного охлаждения за счёт контакта с воздухом, для отвода тепла от нагревающихся электронных компонентов был предусмотрен их механический контакт с элементами корпуса робота. Для подогрева критичных к температуре узлов (например, редукторов с присутствующей в них смазкой) в шарнирах были установлены нагревательные элементы. На основе теплового расчёта специально подбирался цвет эмали для покраски корпуса с целью обеспечения желаемых коэффициентов отражения / поглощения солнечного света. Перед отправкой робота на орбиту были проведены испытания на радиационную стойкость (включая испытания на воздействие заряженных частиц), на электромагнитную совместимость и термовакуумные испытания.
Испытания: на электромагнитную совместимость и в термовакуумной камере

Манипулятор ROKVISS был оснащён двигателями, разработанными RMC специально для своих роботов. Теперь эти электродвигатели продаются под маркой TQ-RoboDrive (причём их можно приобрести и в исполнении для космоса). Кстати, именно они послужили источником вдохновения и для разработки собственных двигателей уже российской компанией KUBO Technologies. Кроме того, в обоих шарнирах манипулятора были установлены датчики момента (тоже разработанные RMC), сигналы с которых джойстик использовал для отражения (в заданном масштабе) создаваемых роботом усилий, а внутренний контур манипулятора — для реализации режимов управления по усилию и управления механическим импедансом.
Робот работал в автоматическом режиме и в режиме телеприсутствия оператора. Автоматический режим предназначался для выполнения различных операций самотестирования робота. Основной же акцент в эксперименте был сделан на режиме телеприсутствия (в данном случае — ручного управления от джойстика с отражением на нём усилий на рабочем органе) в предположении о том, что грядущее в будущем техническое обслуживание на орбите потребует включения человека в контур управления.

Клаус Ландцеттель руководит проведением эксперимента из центра управления в Вайльхайме
Интересной особенностью эксперимента было то, что для максимального снижения временных задержек в линиях связи управление в режиме телеприсутствия осуществлялось во время сеансов прямой связи между роботом и наземным центром управления (German Space Operation Center, GSOC), расположенным в городке Вайльхайм (Weilheim) недалеко от Оберпфаффенхофена. Поэтому сеансы управления были ограничены по длительности примерно 7 минутами, т.е. временем нахождения МКС в зоне прямой радиовидимости при пролёте над антенной станции слежения. Зато в результате удалось получить время прохождения сигнала туда-обратно в пределах 20 – 30 мс при требовании к поддержанию этого показателя ниже значения в 500 мс в качестве условия для реализации режима телеприсутствия. Схема взаимодействия оборудования приведена на рисунке [20].

Проект ROKVISS имел продолжение в виде космических экспериментов «Контур» и «Контур-2», выполнявшихся совместно с ЦНИИ РТК. В рамках первого из них в 2009 г. управление манипулятором на орбите производилось уже не из наземного центра в Вайльхайме, имевшего прямой специальный канал связи с роботом, а из другой точки планеты, связывавшейся с Вайльхаймом через интернет и средствами интернета. Этой точкой вначале стал домашний офис немецкого руководителя проекта (Клауса Ландцеттеля), а затем Санкт-Петербург. Время прохождения сигнала туда-обратно при этом возросло до примерно 80 мс, которые по-прежнему позволяли выполнять задачи эксперимента с хорошим качеством.
В эксперименте «Контур-2» [21] (2011 – 2016 гг.) был изготовлен специальный «космический» джойстик с отражением усилия, предназначенный для работы на МКС. Робот и пульт управления поменялись местами: теперь уже космонавты управляли роботами, находящимися на Земле (в Оберпфаффенхофене и Санкт-Петербурге). Обоснованием для эксперимента являлись будущие миссии по исследованию планет, в которых, согласно предположению, роботы должны будут выполнять работы на их поверхности под управлением космонавтов, находящихся на орбите.
Упомянем ещё о проекте METERON [22] (Multi-purpose End-To-End Robotic Operation Network), инициированном ESA и состоявшем из серии экспериментов, подготовленных и выполненных в 2014 – 2018 гг. при участии ESA, NASA и DLR. Проект также был посвящён отработке управления будущими напланетными роботами с орбиты. Например, астронавты с борта МКС управляли роверами, находящимися на земле, также проводились и другие эксперименты (см. здесь и здесь). RMC участвовал в проекте с экспериментом SUPVIS JUSTIN, в рамках которого астронавты управляли роботом Rollin’ Justin, работавшим в испытательной лаборатории в Оберпфаффенхофене в специально созданном для выполнения задач эксперимента окружении. Поскольку теперь связь была организована через телекоммуникационный спутник NASA, находящийся на геостационарной орбите, время прохождения сигнала от МКС до Оберпфаффенхофена через спутник и наземный центр в США (туда-обратно) возросло уже до примерно 800 мс. В результате концепция управления поменялась: теперь она называлась супервизорная автономность (supervised autonomy) и подразумевала выдачу на робот команд уровня составной задачи, включающей сразу несколько движений, вместо непосредственного ручного управления. Видео об этом эксперименте можно посмотреть здесь.
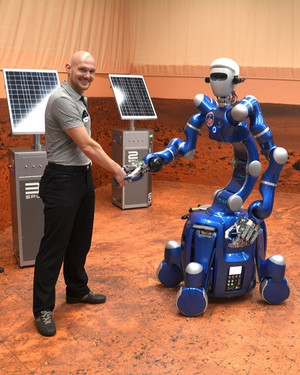
С немецким астронавтом Александром Герстом — пока ещё на Земле
На сайте RMC можно узнать ещё о многих космических проектах, выполненных Центром и выполняемых в настоящее время. Однако я бы обратил внимание на то, что они уже составляют меньшую часть, по сравнению с другими проектами. Там есть и медицинские системы, и роботы-гуманоиды исследовательского (т.е. всякого разного непонятного) назначения, и мобильные наземные платформы — колёсные и шагающие. Есть проекты, посвящённые роботизированному производству, повышению автономности роботов, совершенствованию разных аспектов взаимодействия роботов с человеком и т.п. RMC постепенно спускается из глубин космоса на Землю.
Думаю, свою роль здесь играет то, что современная космонавтика в мире зашла в определённый тупик. После поражавших воображение достижений 1950-х – 1970-х гг. человечество подходит к пределу возможностей имеющихся космических технологий. Завершилась стадия интенсивного роста, началась стадия оптимизаций. Ещё возможны новые результаты, но для качественного сдвига нужен следующий технологический прорыв, а почти всё, чего можно достичь сегодня, уже было раньше. Поэтому современные исследования в космосе всё более специализируются и остаются, преимущественно, на уровне высокой науки, а об их результатах мало кто знает, кроме специалистов. Широкой публике эти исследования непонятны. Как говорят: «это космос!»
Активно же развиваются, в основном, те космические проекты, которые выполняются для земных нужд и на околоземных орбитах: телекоммуникации, дистанционное зондирование (ДЗЗ), военные разработки. Они могут быть экономически целесообразными и/или приносить другой значимый результат. А всё остальное, соответственно, и финансируется по остаточному принципу.
Наверное, и поэтому тоже RMC занялся внедрением космических технологий в земные дела. Они ближе, и эффекта здесь можно добиться быстрее. Кстати, о земных делах...
LWR — один из первых коллаборативных роботов
Мы уже говорили о том, что RMC отсчитывает историю робота LWR (LBR) с того момента, когда в ходе подготовки космического эксперимента ROTEX обнаружилась потребность для астронавтов в наземном манипуляторе, сходном по размерам и функциональности с манипулятором, размещаемым на орбите, — с 1991 г. Исследования в данном направлении привели к созданию вначале (в RMC) трёх поколений всем известного теперь робота: LWR I, LWR II и LWR III.

Манипулятор DLR LWR I со схватом DLR Hand I
Отличительные особенности этих роботов:
- интегрированная в шарниры силовая и управляющая электроника, внутренняя прокладка кабелей;
- установка датчиков момента на выходном валу шарниров (после редуктора) для измерения моментов во всех сочленениях;
- унифицированная легковесная конструкция мехатронных модулей;
- новые методы управления, основанные на измерении моментов.
Да, для того времени такие решения не были очевидными. Быть первым всегда труднее всего.

LWR II
Наиболее совершенным оказался манипулятор третьего поколения, LWR III. В нём были применены электродвигатели, разработанные в RMC, которые уже упоминались выше. Эти бесколлекторные двигатели постоянного тока с постоянными магнитами на роторе (BLDC в англоязычной литературе) — в бескорпусном варианте для возможности оптимального встраивания при конструировании, с полым ротором, обеспечивающим компактную внутреннюю прокладку кабелей, с относительно небольшой частотой вращения и относительно высоким крутящим моментом — хорошо подходят для применения в роботах. И вот теперь они тоже спустились из космоса на Землю.

LWR III
Как обычно и бывает, когда меняется главный узел изделия (в манипуляторе это двигатель), было переработано и улучшено и всё остальное. Для LWR III в RMC были разработаны также собственные энкодеры, переделаны все электронные блоки, изготовлены новые корпусные детали округлых форм из нового на тот момент материала — пластика, армированного углеродным волокном, — которые улучшили внешний вид робота. Порядок следования степеней свободы в кинематической схеме 7-степенного робота был изменён на антропоморфный, чтобы повысить интуитивную понятность манипуляций. Важно, что LWR III был оптимизирован с точки зрения технологичности и стоимости изготовления за счёт применения повторяющихся элементов.
Как уже было сказано, все три поколения манипулятора использовали датчики момента, необходимые для очувствления по усилиям и также разработанные в RMC сначала на базе LVDT-датчиков (для LWR I), а затем переработанные на основе тензометрических датчиков (для LWR II и LWR III). Датчики момента — вещь капризная. Зато они позволили:
- обеспечить детектирование столкновений и даже слабых касаний;
- реализовать режим программирования манипулятора методом демонстрации (когда манипулятор следует за тянущим его по траектории усилием оператора и запоминает эту траекторию);
- получить возможность активного гашения вибраций и компенсации прогибов лёгких и гибких шарниров и звеньев, за счёт чего удаётся достичь высоких точностей позиционирования и малой длительности переходных процессов, сравнимых с аналогичными показателями гораздо более тяжёлых и жёстких промышленных роботов;
- наконец, управлять коэффициентами жёсткости и демпфирования, программируемыми в обобщённых или декартовых координатах в пределах от нуля до максимального значения (соответствующего управлению по координате) — т.е. получить как раз те самые алгоритмы управления механическим импедансом.
Алгоритмы управления механическим импедансом делают манипулятор подобным системе пружина – демпфер с любыми заданными параметрами жёсткости и демпфирования. За счёт этого можно получить ряд интересных применений, которые будут показаны во второй части статьи (например, «обтекание» встречаемых на пути препятствий или активная «податливость» манипулятора). Отделить при этом штатные нагрузки на звеньях манипулятора, вызванные гравитацией и инерционными силами при движении, от контактных воздействий со стороны внешней среды позволяет построение достаточно точной динамической модели робота.
Вот так внешне выглядит управление механическим импедансом. Показаны комплексные режимы для робота Justin, построенного на базе манипуляторов LWR III
Когда мы говорим о жёсткости и демпфировании при управлении механическим импедансом, мы имеем в виду активные жёсткость и демпфирование. Т.е. эти виртуальные «пружина» и «демпфер» на самом деле физически не существуют, а реализуются приводами, что отличает их от реальных звеньев и шарниров с (пассивной) податливостью.
Возвращаемся к нашим манипуляторам. Если кто-то думает, что на LWR III разработка к 2003 г. закончилась, то он ошибается. Закончилась только первая стадия, исследовательская. А дальше началась стадия вторая — трансфер технологий компании KUKA, по соглашению между ней и DLR. Вначале, в 2003 г., стартовал проект PAPAS, в рамках которого создавалась среда разработки для манипулятора, а также контроллер LWR III был подключён к контроллеру KUKA (KRC). Это позволило использовать интерфейс KUKA для программирования робота. Результат был представлен в 2004 г. на выставке «Automatica 2004».
Затем за счёт финансирования от KUKA и в рамках проекта DESIRE работа манипулятора была полностью переведена под управление контроллера KRC, что позволило исключить временные задержки, возникавшие при передаче данных, и за счёт этого повысить быстродействие. Также были улучшены алгоритмы управления механическим импедансом.
И опять ещё ничего не закончилось. Ведь только теперь-то всё и началось! А именно, началась, наконец, разработка коммерческого продукта. Параллельно с проектом DESIRE шла работа по подготовке к серийному производству. Из RMC в KUKA передавались (кстати, вместе с некоторыми специалистами) ноу-хау по разработке легковесных манипуляторов, их сенсорики и интегрированной электроники. Все составные части робота снова подверглись тщательной ревизии. В итоге была изготовлена серия из 18 манипуляторов уже под наименованием KUKA LBR3. Этот манипулятор был представлен на выставке «Automatica 2006».
Потом был разработан KUKA LBR4. Для него опять были модифицированы некоторые конструктивные элементы: редуктора, кабельные трассы — для упрощения и удешевления робота. RMC переработал для KUKA программное обеспечение контроллера. Было повышено удобство для пользователей, добавлено много новых программных функций (детектирование контакта, виртуальные стены, взаимное наложение движений), появилась возможность задавать параметры управления механическим импедансом в декартовых координатах через системные переменные и т.д. Было существенно повышено быстродействие, так что стало возможно переключение режимов управления сервоприводами — например, в случае внешнего контакта — всего за 1 мс. Это достигается за счёт высокой частоты обмена внутри контуров управления: 3 кГц для внутреннего и 1 кГц для внешнего контура.
Частота управляющего контура особо критична именно для силомоментных режимов управления, использующих обратную связь с датчиков сил / моментов. При управлении по координате (положению или скорости) всё проще. Как нам говорили сотрудники RMC, по их опыту, для управления по моменту требуется частота 500 Гц, а лучше 1 кГц. И дальше добавляли, что ещё лучше — ещё больше. Ну, вот в LBR4 они и сделали 3 кГц. Эти самые килогерцы и спасали того вышеупомянутого весельчака, которого LBR шлёпал по лбу металлическим блином.
LBR4 весит 15 кг при номинальной грузоподъёмности 7 кг. Благодаря малому весу, он обладает пониженным энергопотреблением, что, в частности, позволяет запитывать его от батарей. А ещё он мобилен: к месту установки его можно принести в руках. Ещё не так давно это было бы невозможно для промышленных манипуляторов. Также были бы невозможны и такой уровень очувствления, и программируемая гибкость робота, причём раздельно по всем осям: обобщённым или декартовым.
Производство LBR4 началось в 2008 г. И всё же производители посчитали, что этот робот, по-прежнему, ещё не был готов для использования на производстве, поэтому основным его покупателем явился исследовательский сектор.
Только к 2013 г. манипулятор, уже под маркой LBR iiwa, был доведён до стадии массово выпускаемого продукта. Он выпускается в двух модификациях: грузоподъёмностью 7 кг (масса 22,3 кг) и грузоподъёмностью 14 кг (масса 29,5 кг).
Наконец, в 2018 г. KUKA представила новый коллаборативный робот LBR iisy. Правда, на официальном сайте компании этого манипулятора пока (на сентябрь 2020 г.) ещё нет в продаже. Наверное, когда-нибудь появится.
KUKA iisy: программирование методом демонстрации и другое [23]
За чей счёт этот банкет?
Обратите внимание на сроки разработки манипулятора, начавшейся аж в 1991 г., а завершившейся окончательной подготовкой к массовым продажам только к 2013 г. Логично задать вопрос: а кто оплачивал труд разработчиков всё это время? За чей счёт этот банкет?
Ответ на этот вопрос есть, да и не скрывается, потому что в научных публикациях принято указывать источники финансирования исследований. Если говорить о проектах RMC по космической робототехнике, то вполне очевидно, что они финансировались за счёт бюджетных, государственных средств. Все рассмотренные выше космические проекты — это, с точки зрения робототехники, интересно и местами круто, а вот с точки зрения бизнеса — вообще нечего продавать.
Если же говорить конкретно о манипуляторе LWR / LBR, то и здесь доля бюджетного финансирования на стадии разработки была весьма значительна [24]. Сомневаюсь, что можно найти цифры, но всё же давайте смотреть.
Начальная стадия разработки проводилась в рамках подготовки космического эксперимента ROTEX. В 2003 г. стартовал проект PAPAS, профинансированный Министерством образования и науки Германии (Bundesministerium fur Bildung und Forschung, BMBF), в ходе которого LWR III был переведён под управление контроллера KRC от KUKA. Результаты были представлены на выставке «Automatica 2004». Показав хороший результат, RMC вновь получил финансирование от BMBF уже в рамках проекта DESIRE с целью полного переноса управляющих программ на контроллер KRC. Новый манипулятор был показан на выставке «Automatica 2006».
По линии Правительства Германии финансировались также проекты NEUROS, LISSY, DIROKOL, MORPHA.
Ещё был проект SMErobot, финансируемый по программам Евросоюза, целью которого было заявлено создание малогабаритного манипулятора для малых и средних предприятий — «третьей руки рабочего». «Третья рука» была продемонстрирована на «Automatica 2008». На базе этого проекта стартовал следующий, PHRIENDS (также евросоюзовский), посвящённый исследованию возможности совместной работы человека и робота на предприятии, учитывая риск физического контакта между ними. В рамках ещё одного финансируемого Евросоюзом проекта BRICS разрабатывался программный интерфейс для манипулятора LWR.
Финансовая поддержка в ходе разработки DLR и KUKA малогабаритного манипулятора оказывалась также Правительством Баварии за счёт средств Исследовательского фонда Баварии (Bayerische Forschungsstiftung) и общества «Инновационная Бавария» (Bayern Innovativ).

Существенные инвестиции в разработку манипулятора вложила и компания KUKA. Но чтобы показать масштабы государственной поддержки, здесь были нарочно перечислены только целевые проекты, финансировавшиеся именно за счёт бюджетных средств. Подозреваю, что и это ещё не всё из того, что было прямо или косвенно вложено со стороны государства Германия. Но вряд ли многие из посетителей на выставках, небрежно таскающих для развлечения манипулятор за «хобот» и лениво колупающих ногтиком краску, догадываются, как много труда, времени и средств потребовалось для его создания!
Заключение
Похоже, что мечту человечества о межзвёздных перелётах и колонизации планет придётся отложить на неизвестный срок. Вот и российские проекты по космическим буксирам на основе ядерных энергодвигательных установок, насколько я знаю, — это пока ещё очень далеко, непросто, да и к тому же уже безэкипажно (хотя изначально-то рассматривался вариант с космонавтами на борту). А за рубежом так и вовсе альтернативных предложений нет… Так что мы, ныне живущие, скорее всего, не увидим высадку первого человека на Марс. А больше в Солнечной системе человеку и лететь-то некуда. Ну, разве что обитаемую базу на Луне вроде технически можно создать. Правда, непонятно, действительно ли это нужно и зачем именно сейчас. А стратегическая цель, грандиозная и всем понятная, оказалась недостижимой в обозримой перспективе.
Но давайте мы как робототехники взглянем на это с оптимистической точки зрения. Дело в том, что в космосе полезных дел и сейчас видно столько, что за два поколения не переделать! Можно ремонтировать спутники на орбите, продлевая срок их службы. Можно уводить с орбит «космический мусор». Можно строить в точках Лагранжа космопорты (например, космические заправочные станции) и снабжать их при помощи автоматических КА. Можно сооружать в космосе крупногабаритные конструкции, которые затруднительно целиком вывести на орбиту, например, антенны большой апертуры для ДЗЗ или большие космические телескопы для исследования дальнего космоса. Можно изучать планеты и астероиды с помощью зондов и планетоходов или добывать на Луне гелий-3… Да мало ли что ещё можно!
Ну, а в таких задачах именно роботы должны быть на первых ролях — просто потому, что человек может далеко не всё.

DLR RMC — один из тех научных центров, которые как раз и стараются подготавливать эти возможности для робототехники. Возможно, не всё получается так быстро, как хотелось бы. Не все задуманные космические проекты вообще реализуются. Зато в случае с RMC это приводит к применению для вполне земных приложений тех технологий, которые изначально разрабатывались для космоса.
Теперь во второй части статьи мы рассмотрим алгоритмы управления механическим импедансом, являющиеся визитной карточкой RMC. Разберём, как они работают и какие возможности это даёт роботам.
- ^DLR — Robotics and Mechatronics Center
- ^LBR iiwa – Programmable Compliance for Robot Motion — Youtube-канал KUKA
- ^Impedance control — Wikipedia
- ^History of the DLR LWR
- ^LWR III
- ^Safe Human-Robot Interaktion — Youtube-канал saferobots
- ^Rollin' Justin Robot Catches Balls Tossed in its Direction — Youtube-канал Hizook
- ^Agile Justin: An Upgraded Member of DLR's Family of Lightweight and Torque Controlled Humanoids — Youtube-канал DLR RMC
- ^Rollin' Justin Robot — Youtube-канал Hizook
- ^Слова из немецкого марша «Das Lied der SA (Denn wir sind die braunen Soldaten)», 1933 г.
- ^Слова из песни «Du hast» метал-группы Rammstein, 1997 г.
- ^Ну… Вы сами знаете.
- ^Robot Technology Experiment on Spacelab D2-Mission
- ^STS-55: The D2 Project
- ^The KUKA-DLR Lightweight Robot arm – a new reference platform for robotics research and manufacturing
- ^The ESS (Experimental Servicing Satellite) – Study and Lab Demonstrator
- ^ROKVISS – Robotics Component Verification on ISS
- ^ROKVISS Results
- ^Популярные заблуждения про радиационную стойкость микросхем
- ^ROKVISS. Verification of Advanced Light Weight Robotic Joints and Tele-Presence Concepts for Future Space Missions
- ^Projekt Kontur-2
- ^METERON
- ^An Industrial Robot for Everyone – Quickly Solve Repetitive Tasks | LBR iisy — Youtube-канал KUKA
- ^См. [15].