

Перемещение по земной поверхности с использованием шагающего принципа является своего рода «Священным Граалем» робототехники. В разные времена множество изобретателей пытались решить эту задачу на том уровне науки и техники, который был доступен на тот момент. И только недавно, с появлением роботов Boston Dynamics, китайских производителей, эта задача стала решаться достаточно быстрыми темпами. В этой статье мы попробуем порассуждать на тему того, как мог бы выглядеть перспективный шагоход, если решать эту задачу на текущем уровне.
В связи со своим живым интересом к теме робототехники, которая подкрепляется постоянными практическими опытами, я всегда стараюсь держать руку на пульсе происходящего в теме шагающих роботов и некоторые свои соображения постараюсь изложить в этой статье.
Человечество достаточно давно мечтает о «механическом коне» — изобретатели «копают» эту тему, не останавливаясь ни на минуту. Если изначально конструкции разнообразных шагоходов были достаточно примитивными и представляли собой, по сути, рычажные конструкции:
то, с появлением двигателя внутреннего сгорания и компактного источника энергии в виде бензина, изобретатели стали пытаться применять такого рода двигатели для создания механических устройств. Причём эти попытки не закончились даже сегодня:
Получается это конечно достаточно смешно, однако показывает степень интереса людей из абсолютно разных сфер и разного уровня знаний — к этой теме.
Большие корпорации также не остались в стороне и периодически рождают свои достаточно интересные идеи, среди которых можно назвать, например, комбайн для лесных работ (Plusjack Walking Harvester), разработанный финской компанией.
Его движения имитируют движения муравья, и при его разработке компания руководствовалась желанием создать некое устройство, которое могло бы передвигаться по пересечённой местности в гуще леса.

Источник картинки: zen.yandex.ru
Ей это вполне удалось, и такой лесной трактор-комбайн успешно передвигался по лесным буреломам, практически не оставляя за собой следов.

Источник картинки: pikabu.ru
Однако, ввиду неизвестных причин, компания не стала производить эту машину большими партиями и мир лишился достаточно интересного устройства. Аппарат был произведён в количестве всего 3 штук, несмотря на вполне успешную работу.

Источник картинки: pikabu.ru
Среди других достаточно известных примеров больших шагоходов можно назвать два, построенных энтузиастами этого дела: Prosthesis ( «Протез») и Mantis.
Причём первый из них, который разрабатывался в течение 10 лет, представляет собой своеобразный мощный экзоскелет, управляемый движениями человека. Разработчик использует его в шоу целях:
Второй, Mantis — построен инженером, который затратил около 4 лет на разработку такого устройства.
Вес робота составляет порядка 1900 кг и он приводится в движение за счёт 2,2-литрового турбодизельного двигателя Perkins, мощностью в 50 л. с.
Двигатель приводит в действие гидравлическую систему, которая состоит из 18 приводов и позволяет роботу передвигаться со скоростью до 1 км/ч.
Как нетрудно заметить, объединяющей особенностью всех трёх перечисленных выше роботов является использование гидравлического привода, что выливается в итоге в достаточно медленное движение. Разумеется, из-за большого веса робота приходится использовать подобные решения, однако хотелось бы видеть их скорость существенно более высокой (здесь следует сделать оговорку, что это зависит от целей, для выполнения которых предназначен данный конкретный робот — он вполне может быть медленным, если достижение целей при такой скорости будет успешным). Но неужели гидравлика настолько плоха в качестве привода?
Вовсе нет: хорошим примером скоростной гидравлической системы будет известный робот BigDog, который приводился в движение двухтактным двигателем, мощностью в 15 лошадиных сил, приводящим в действие гидравлический насос, прокачивающий с большой скоростью гидравлическую жидкость через систему робота. Устройство получилось достаточно эффективным, что позволило ему перемещаться со скоростью до 3,1 м/с.
Однако, создание подобного типа роботов, оказалось дорогим даже для Пентагона, в связи с чем военные отказались от постановки на вооружение мула-носильщика (одной из следующих разработок), предназначенного для переноски мин и снарядов по горам и пересеченной местности:
Логично предположить, что для других частных компаний (если таковые найдутся и возьмутся за разработку аналогичного решения), высокая сложность и дороговизна разработки можно стать непреодолимой проблемой.
В связи со всем вышесказанным давайте подумаем, а может ли быть альтернативное решение для внедорожной шагающей системы?
В качестве альтернативного средства привода для роботов сразу приходит в голову пневматический принцип. Почему именно он: так как он позволяет использовать один центральный пневматический узел, создающий давление и распределяющий его по системе трубопроводов к исполнительным актуаторам.
Таким образом, мы имеем достаточно лёгкое, условно-недорогое решение, малый вес конструкции в целом.
В противовес ему, электрический привод, потребует гораздо больших материальных затрат на монтаж соответствующих мощных двигателей и подведение к ним электроэнергии, а также её хранение и генерацию.
Именно поэтому, достаточно широко распространены пневматические решения в пассажирском транспорте: в автобусах и вагонах метро используются пневмоприводы для открывания дверей.
Однако по-настоящему мощных пневматических решений не наблюдается, хотя некоторые усилия в этом направлении предпринимаются: ряд компаний разрабатывает как шагающих роботов:
так и андроидов, с приводом от пневматических мускулов:
которые представляют собой жёсткую оболочку, внутри которой может раздуваться и сжиматься гибкий мешок. Оболочка ограничивает возможности этого мешка для раздувания в стороны, ввиду чего ему приходится увеличивать и уменьшать свою длину:
By Rocketmagnet (hugo@shadowrobot.com) — Shadow Robot Company, CC BY-SA 3.0, commons.wikimedia.org/w/index.php?curid=2107309
Дороговизна решений такого рода и то, что инженеры не так давно обратили к ним свой взор, не позволяет нам пока порадоваться чему-то действительно впечатляющему…
Распространение пневматические системы привода роботов в шагающих системах ещё не получили, ввиду молодости компьютерных шагоходов в целом (на мой взгляд), хотя в обычной промышленности пневмоприводы используются очень широко:
Кроме того, если уж заниматься передачей некой повышенной мощности, то инженер, скорее всего, предпочтёт использовать именно гидравлические системы вперёд пневматических, так как именно они сулят гораздо больше выгоды.
Ещё раз возвращаясь к теме электрических шагающих систем, хотел отметить, что хотя безусловно, мы все в курсе работ в области шагающих роботов от Boston Dynamics или Unitree Robotics:
но мы ведь говорим о по-настоящему мощной машине, своего рода «скоростном шагающем танке» для перевозки более чем 1-го человека! А таковых электрических систем пока не наблюдается (и, видимо, ещё долго не будет наблюдаться).
Несмотря на такое положение вещей, существует один вид «условно-пневматических систем», если их можно так назвать, в которых используется энергия разогретых газов: линейные двигатели внутреннего сгорания.
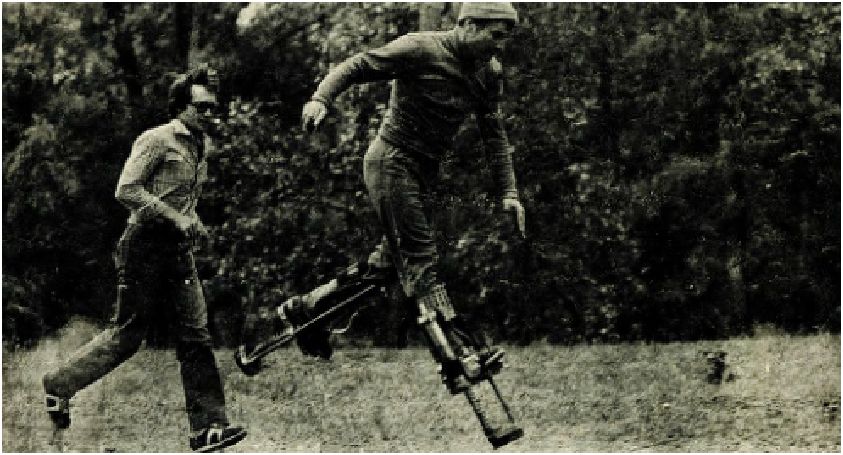
В нашей стране наиболее известным подобным устройством можно назвать «сапоги-скороходы» — линейные двигатели, появившиеся около 30 лет назад и представляющие собой цилиндры, под подошвой бегуна, в которые впрыскивается топливо, загорающееся от давления.

Источник картинки: rusdarpa.ru
Конструкторам удалось разработать устройство, в котором происходит достаточно мягкий процесс горения, позволяющий надевшему их человеку, бежать со скоростью до 30 км/ч, совершая прыжки более полуметра в высоту. При этом расход топлива составляет, порядка 140 грамм/час, а экономия энергетических затрат бегуна составляет порядка 70%.

Источник картинки: dvs.ugatu.ac.ru

Источник картинки: dvs.ugatu.ac.ru
За рубежом подобного рода устройства (линейные приводы) используются в качестве трамбовок для дорожных работ. По своей сути они представляют такой же линейный двигатель, в котором происходит первичное сжатие смеси, после чего оператор нажимает на кнопку, находящуюся на рукоятке, что вызывает проскакивание электрической искры, поджигание смеси, подпрыгивание всей установки, новое сжатие, после чего процесс повторяется:
Почему я упомянул подобного рода устройства: основной проблемой многих робототехнических систем является их вес и необходимость выработки достаточно большого количества энергии в краткий промежуток времени. Мало того, эту энергию необходимо каким-то образом эффективно транспортировать, применять, восполнять. Всем этим требованиям, на мой взгляд, весьма полно удовлетворяет линейный двигатель.
Предположим гипотетическое устройство, которое представляет собой робота-многоножку, в каждой ноге которого установлен линейный двигатель внутреннего сгорания. Перемещение ног происходит посредством вспышки смеси в каждой ноге, а также изменения угла наклона этой части ноги относительно горизонта. Другими словами, робот наклоняет ноги, чтобы оттолкнуться и сдвинуться вперёд. Он может двигаться как, условно, «прыжками», так и поочерёдно переставляя (даже скорее «перебрасывая») ноги. На картинке ниже показан приблизительный принцип.

В состоянии покоя, когда машина находится в неподвижности, изначальный импульс может быть дан неким пневматическим пускателем, как в танках, где сжатый воздух запускает двигатель танка. В нашем же случае, сжатый воздух может дать предварительный импульс (если его подать в цилиндры линейных двигателей), чтобы «подкинуть» робота, после чего произойдёт его приземление, предварительное сжатие смеси в камерах сгорания, поочерёдные вспышки в них и робот начнёт движение.
Мощность такой системы может быть весьма велика, вспомним дизельный сваебойный копер, где изначально груз поднимают вверх, потом сбрасывают, и, в самой нижней точке, когда воздух под грузом сжат и разогрет — туда впрыскивается дизельное топливо, которое воспламеняется от температуры. Энергетика процесса такова, что позволяет забивать сваи в землю:
Для стабилизации процесса горения можно использовать все наработки: форкамеры в цилиндрах, свечи зажигания поверхностного разряда ( где разряд покрывает свечу снаружи и его площадь настолько велика, что он просто не оставляет шансов топливу не воспламениться), использование множественных цилиндров в одной ноге ( 2-3 цилиндра установлены рядом и срабатывают вместе или поочерёдно. Цель — создать дублирующие системы в каждой ноге, которые гарантированно позволят роботу сделать шаг, даже если один из двух-трёх цилиндров в ноге не сработал) и т.д.
Таким образом, на выходе, мы можем получить достаточно мощную систему, которая не требует транспортирования энергии для движения в каждую ногу, так как двигатель, необходимый для этого, интегрирован в неё непосредственно. Это позволит роботу быть как достаточно мощным (грузоподъёмным) – так и осуществлять скоростное движение по пересеченной местности.
В качестве завершения: достаточно давно, мне попалась на глаза интересная разработка, созданная специалистами лаборатории биомиметических систем калифорнийского университета Беркли. Созданная ими модель робота представляла собой шестиногое устройство, имитирующая тип движения таракана. Аппарат был создан с использованием лазерной резки, и приводился в действие с помощью миниатюрного электродвигателя. Устройство получилось на редкость проворным:
Видимо это видео впечатлило многих, так как некоторое время спустя после появления этой разработки, двое молодых учёных с научными степенями PhD, запустили стартап, который занялся производством подобного типа роботов на радиоуправлении — для детей. Проект получил название Kamigami Robots:
На сегодняшний день, по моим наблюдениям, это самые быстродвигающиеся роботы-многоножки.
Нетрудно представить, что если повторить такое устройство в масштабе (конечно, уже не из бумаги — а соответствующей металлической конструкции), скажем, чтобы оно было в длину метров 7, снабдить качественной подвеской (чтобы избавить ездоков по максимуму от тряски) – то такая платформа могла бы перевозить до 6 человек и передвигаться по пересечённой местности, в качестве такого своеобразного туристического автобуса-шагохода! Стартап? Why not…


Комментарии (21)

stalinets
02.02.2022 17:46-2Уже сейчас можно взять робота-собаку от BD, увеличить её до размера небольшой лошади, прикрутить седло и мотоциклетный руль, рассчитать на вес ездоков около 180 кг с запасом под ударные нагрузки на бездорожье (2 обычных человека, или 1 + кофры с багажом), обеспечить скорость хотя бы километров 50 в час по ровной дороге, и вот он, желанный многими транспорт - ультравездеходный мотоцикл, или механическая лошадь...

fougasse
02.02.2022 18:11+3Можно взять или это просто предположение? У меня есть сомнения в настолько лёгкой масштабируемости робо-собаки до механической лошади, но, возможно, у вас больше информации.
stalinets
02.02.2022 22:47Нет, это только предположение. Я удивляюсь, почему BD не додумалась до такой простой идеи и не реализовала такое транспортное средство, сначала для бездорожья, а потом сертифицировав его в перспективе как транспорт для дорог общего пользования. И вот его, в отличие от робо-собаки, реально стали бы покупать обеспеченные люди, это же нечто!
fougasse
02.02.2022 23:15+3Видимо, BD понимает, что собака совсем не масштабируется до лошади. Как по деньгам, так и по безопасности.
Там, как мне видится, физику не обманешь.

iboltaev
03.02.2022 10:00можно из буханки хлеба сделать троллейбус, но смысл?
stalinets
03.02.2022 10:54Зачем изобретать колесо, есть же ноги. Зачем изобретать электролампочку, есть же лучина. И т.д.

tsurugi-no_ken
03.02.2022 11:07Колесо плохо передвигается по сильно пересечённой местности.
Но, как недавно обсуждалось на Хабре в статье про планетоходы, гусеница при большей проходимости имеет больше проблем необходимостью регулярного с обслуживания, чем колесо.
vakhramov
02.02.2022 21:14+3Когда электромеханика начинает увеличиваться, она дорожает в геометрической прогрессии. Становится важна точность (16граммовый таракан если и врежется на полной скорости куда-то, то может и не помнётся, а 16килограммовый уже покалечит). Так что мощный, скоростной, шагающий - выберите два пункта.
PS однако пружинки на ноги, как в клипе beastie boys, приобрести захотелось))

drWhy
02.02.2022 21:51А если так?

vakhramov
02.02.2022 22:10+2Не уверен, что оно приводит что-то помимо колёс в штатном режиме. Думаю - останавливается перед препятствием, ставит на препятствие передние колеса, а потом снова едет на них. И так пока все "ноги"-колёса не окажутся в нужной плоскости. С такими рычагами и кажущимся весом удивительно, что оно в динамике не складывается. Хотя это же картинка.
drWhy
02.02.2022 22:56Мультфильм Властелины времени 1982 г. Этот вездеход в результате разбился, зацепившись за корень дерева.
Но схема ног-колёс кажется интересной, не зря же её применили в Handle от Boston Dynamics.vakhramov
02.02.2022 23:59+1Ознакомился с данным роботом, "ноги" он по отдельности поднимать не может, по лестнице только съезжает. А-ля сноубордист на гироскутере.
Суть ходьбы заключается в подстановке конечности при переносе центра тяжести и начале падения. Колесо быстро это падение отрабатывает, нога дольше, с более медленной скоростью, но с бОльшими возможностями.
Хотя эволюция не имеет в природе колёс (т.к. в природе нет и дорог), с мощностью (величиной ног) и скоростью ограничения продиктованы физикой, видимо. Двуногие медленнее четвероногих. Четвероногие имеют разные типы перемещения, судя по всему - движение рысью(движение и маневрирование) или иноходь(движение без маневрирования) являюся оптимальными для перемещения груза (галоп неэффективен с нагрузкой, кмк)
В процессе написания данного поста наткнулся на https://animationclub.ru/blogs/3544/3054/pohodki-cetveronogih?search=&orderby=creation_date&category=8&page=&tag=&start_date=&end_date=
может оказаться полезным, хотя про перенос доп.нагрузки при этих стилях перемещения там ничего нет.
Комбинация с колёсами(большими их не сделать в данных случаях) - нагрузка на подшипники убьёт их, а механизм убирания утяжелит конечность (конец рычага).

Javian
03.02.2022 08:54Шагание требует больше инергии чем колесо. Для планетоходов режим шагания расматривался как вариант движения в ситуации когда колесо неэффективно.

https://www.youtube.com/watch?v=nF2gU3_9WC4

ra3vld
03.02.2022 11:22+1Плюс\минус похожие "пошло-поехало" в масштабе собаки сейчас тоже существуют. Сходу вот из Цюриха, но еще из китайцев тоже кто-то делал.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

Germanjon
03.02.2022 09:37+3Покатался я давеча на верблюде по ровной дороге (полноприводное шагающее транспортное средство, формулой 4х4). Ну его, на джипе намного комфортнее
tsurugi-no_ken
03.02.2022 10:43А по сильно пересечённой местности?

LibrarianOok
03.02.2022 11:16Помнится, рабочий вариант скоростного шагохода имел в своей основе щётку.

customtema
03.02.2022 19:42+1"ввиду неизвестных причин, компания не стала производить эту машину
"неизвестные причины" - это потрясающе ужасная ненадежность. Она ломалась на испытаниях, до и после. Проблемы в конструкции, и эти проблемы инженерного характера - в определенных местах слишком большие нагрузки, получается или бешенная стоимость узлов, или ненадежная конструкция.
Шагающих машин доселе мало именно по этой причине. Так-то их весьма давно изобрели, каких только не придумали.
Javian
В США в 1960-х выпускали pogo stick, работавшие на бензине
Gas Powered Pogo Stick