
Изучение структурных свойств стационарных динамических систем - хорошо изученная область теории дифференциальных уравнений. Иначе обстоит дело, если коэффициенты зависят от времени. Однако, такие системы достаточно часто встречаются в задачах механики и управления. Сегодня выделяют лишь классы нестационарных систем, свойства которых в достаточной мере изучены. В данной статье рассматривается один из таких классов - периодические системы.
Результаты могут быть использованы при изучении вопросов устойчивости программных движений различных механических объектов, линеаризованные модели которых описываются линейными нестационарными системами.

Линейные нестационарные системы
Рассматривается линейная система дифференциальных уравнений вида:
где - время,
-
-мерный вектор фазовых координат,
-
-мерный вектор управлений (или возмущений),
-
-вектор измерений (или наблюдений),
,
,
- известные матричные функции времени.
Если матрицы ,
,
- постоянные матрицы, то система называется стационарной, в противном случае - нестационарной. Причем, если матрица
зависит от времени, то система называется нестационарной по управлению, а если
, то нестационарной по наблюдению.
Преобразование Ляпунова
Рассматривается линейная система:
где - вектор
размерности,
- непрерывная равномерно ограниченная вещественная или комплексная матрица-функция.
Говорят, что система (2.1) приводима к системе
если существует линейное преобразование
где - невырожденная матрица размерности
с непрерывно дифференцируемыми элементами, такая что:
и
ограничены при
,
( то есть
имеет непрерывную производную на временном интервале
)
(определитель ограничен по модулю снизу положительной постоянной величиной
)
Тогда линейное преобразование (2.3) переводящее линейную систему (2.1) в систему (2.2) называется преобразованием Ляпунова.
Матрицы и
- кинематически подобны, то есть связаны соотношением:
Если матрица - постоянна, то связь соотношение коэффициентов линейных систем превращается в обычное соотношение подобия:
также является преобразованием Ляпунова.
Предполагается, что в системе (2.1) произойдет замена переменных, вследствие которой она примет вид системы (2.2). При этом, система (2.2) будет сохраняет свойства системы (2.1), но имеет более простой вид, для которого исследования свойств оказывается проще, чем для системы (2.1).
Основные свойства, которые сохраняются при преобразовании (2.4), - это свойства устойчивости решений системы (2.1), то есть преобразование Ляпунова (2.4) сохраняет характеристические показатели решений.
Действительно, если и
- решения систем (2.1) и (2.2), соответственно, связанные соотношением
, то
, а следовательно,
. Аналогично, поскольку
,
, что и требовалось.
Приводимые системы
Наиболее полно изученными являются автономные линейные системы обыкновенных дифференциальных уравнений. Поэтому важны признаки приводимости линейных систем к системам с постоянными коэффициентами.
Простейший результат в этом направлении представляет теорема Еругина: Для того, чтобы система (2.1) была приводима к системе (2.2) с постоянными коэффициентами необходимо и достаточно, чтобы некоторая ее фундаментальная матрица была представима в виде , (2.5), где
- преобразование Ляпунова, а
- постоянная матрица.
Для линейных систем с периодическими коэффициентами представление (5) всегда выполнено и имеет место теорема Флоке: Если в системе (2.1) матрица-функция периодична:
, то любая ее фундаментальная матрица
имеет вид
, где
- постоянная, а
- непрерывно дифференцируемая невырожденная
-периодическая матрицы (вообще говоря, комплексные).
Из теорем Еругина и Флоке вытекает теорема Ляпунова о приводимости: Любая система (2.1) с периодической матрицей приводима к системе с постоянными коэффициентами.
Приводимые к системам с постоянными коэффициентами системы хороши, в частности, тем, что они правильны по Ляпунову и, следовательно, к дифференциальным уравнениям с такими линейными частями применима теорема Ляпунова об устойчивости по первому приближению.
Один из основных методов исследования систем с переменными коэффициентами является приведение их к стационарному виду с помощью преобразования Ляпунова. Если такое преобразование возможно, то нестационарная система называется приводимой.
Алгоритм приведения линейных систем, нестационарных по управлению
Рассмотри линейную систему, нестационарную по управлению:
где - вектор
управлений (возмущений),
-
матрица с непрерывно дифференцируемыми элементами, такая, что:
- постоянные
- матрицы,
- линейно независимые непрерывно дифференцируемые функции, такие что можно ввести вектор
где компоненты - это функции
, а
выбраны так, чтобы поведение вектора
описывалось системой (условие периодичности):
где - постоянная
матрица. То есть
могут быть полиномами, экспонентами, синусами, косинусами произвольных частот и всевозможные комбинации этих функций.
Сопряженная система будет иметь вид:
Введем следующую замену переменных:
где - кронекеровское произведение матриц.
Замена (3.6) приводит систему (3.1) к виду:
Переход к полностью стационарной системе:
При этом, переменные и
связаны соотношением:
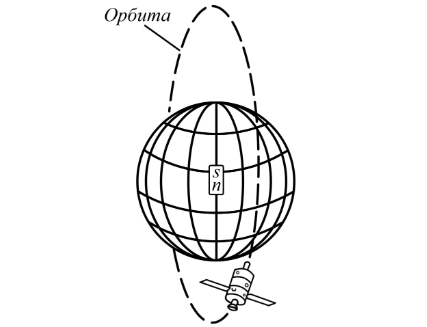
Преобразование системы тангажных колебаний малого спутника, нестационарной по управлению, к стационарному виду
В 60х годах прошлого века у первого метеорологического спутника США (Tiros 1) были обнаружены нарушения ориентации и движения. Причиной оказалось сильное влияние магнитного поля Земли (МПЗ). Тогда же было предложено использовать это поле для управления космическими аппаратами (КА) и созданы первые магнитные системы управления (МСУ).
Физическая постановка
При построении системы, предполагается что:
Система строится для малых спутников
Центр масс спутника движется по круговой полярной орбите вокруг Земли с постоянной скоростью
Геомагнитное поле аппроксимируется моделью прямого диполя
Намагниченность космического аппарата отсутствует
Управление осуществляется с помощью токовых или магнитных катушек
Множество допустимых управлений - это множество кусочно-непрерывных функций, ограниченных по абсолютной величине
Рассматриваем влияние гравитационного и магнитного моментов, остальными мы пренебрегаем
Полагается, что спутник стабилизирован по углам крена и курса, то есть рассматриваются уравнения тангажных колебаний
Система представляет собой линеаризованные в окрестности нулевого положения равновесия уравнения управляемого движения
Учитывая все вышеперечисленное, линеаризованная система примет следующий вид:
где ,
В матричном виде:
где ,
.
,
- угол тангажа и скорость соответственно
,
,
- главные моменты инерции
- орбитальная угловая скорость КА относительно Земли
- радиус Земли
- магнитный момент Земли
- магнитная проницаемость среды
,
- управляющий (возмущающий) момент катушки. Для малых спутников
Система (4.1) является нестационарной по управлению, но, согласно теории, она является приводимой.
Приведение к стационарному виду
представима в виде произведения постоянной матрицы и периодической функции, согласно (3.2):
Введем вектор , удовлетворяющий условиям (3.3)-(3.4). Из уравнения (4.2) видно, что одна из его компонент
. Подберем такую компоненту
, чтобы
удовлетворял (3.4).
Тогда, для удовлетворения условия (3.4), примем за вторую компоненту
и матрицу :
Согласно (3.5), сопряженная система имеет вид:
Введем замену переменных, согласно (3.6):
Замена (4.2) преобразует систему (4.1) к виду ( 3.7), в которой:
Тогда ( 3.7) примет вид:
Подставив результаты в ( 3.10) получим стационарную систему следующего вида:
(4.3) - приведенная стационарная система, сохраняющая структурные свойства системы (4.1).
Переход обратно, в двумерное пространство, будет осуществляться следующими уравнениями:
С особой благодарностью Д.И.Бугрову!
Источники
Морозов В.М. Каленова В.И. Линейные нестационарные системы и ихприложения к задачам механики. — Москва : Физматлит, 2010.
Морозов В.М. Каленова В.И. Управление спутником при помощи маг-нитных моментов: управляемость и алгоритмы стабилизации. — Москва :Научно-исследовательский институт механики МГУ им. М.В. Ломоносо-ва, Космические исследования том 58 No 3, 2020.
Бугров Д.И. Формальский А.М. Зависимость от времени областей дости-жимости систем третьего порядка. — Москва : Прикладная математикаи механика, Вып.2, 2017.
Александров В.В. Лемак С.С. Парусников Н.А. Лекции по механикеуправляемых систем. — Москва : Московскй государственный универ-ситет имени М.В. Ломоносова, 2020.
Епугин Н.П. Линейные системы обыкновенных дифференциальныхуравнений с периодическими и квазипериодическими коэффициента-ми. — Минск : АН БССР, 1963. — С. 272.
Коваленко А.П. Магнитные системы управления космическими лета-тельными аппаратами. — Москва : Машиностроение, 1975.
iggr63
Очень интересное эссе. Кто-нибудь понял?
Arastas
Да понять-то его несложно. Смысл публикации на Хабре от меня ускользает.
MasterMentor
Понять, действительно не сложно. Доступно для понимания учащихся школ от 8+ класса. Конечно, если бы им вместо бессмысленной и беспощадной долбёжки элементарной математики, давали элементы физики и математики периода 1850-1940 гг. (да, и векторная, и матричная алгебры - тоже просты и для понимания, и для запоминания.)
Но я думаю, что к сожалению, мы ещё не до конца преодолели тяжкое наследние средневековья. О тернистом пути массового образования в России интересное исследование здесь:
Школы, созданные в первой четверти XVIII в., предназначались в основном для детей господствующего класса, которые, получив образование, должны были занять руководящие посты в армии, на флоте, в общей системе государственного управления. Отдельные школы были созданы и для других сословий — для детей солдат, мастеровых, приказных и т.д. Целью этих школ была подготовка специалистов низшего звена. Однако и в эти школы крестьянские дети по существовавшим тогда правилам не принимались. Особенно строго запрещалось принимать в школы детей крепостных крестьян....Вскоре после принятия Устава 1804 г. от него начались отступления, изменения вносились как Министерством народного просвещения, так и самими учебными округами. Из учебных планов гимназий были исключены философия, политическая экономия, коммерческие науки, сокращено естествознание. Содержание приходских училищ было либо делом самих крестьян (казенные крестьяне), либо — помещиков и церкви. Государственная казна средств на них не предусматривала. ...Расширяется сеть частных учебных заведений, но правительство стремится сдержать их рост. В 1883 г. запрещается открывать их в Москве и Петербурге, хотя позже они были разрешены вновь. Частные школы также находятся под строгим правительственным контролем. Этот период так охарактеризован известным деятелем просвещения Д.И. Тихомировым: «Об истинном, гуманно воспитывающем просвещении не только народа, но и привилегированных классов в дореформенное, крепостное для всех время не только не заботились, но боялись и думать. Воспитание и учение носили формально-дисциплинарный характер в семье и казарменно-полицейский — в школе, как подготовка к жизни подневольной. Для народа и вовсе почти не было даже и такой школы. Дьячок и отставной солдат розгой учили грамоте по книге церковной. И Евангелие тогда, как запретная весть о царстве любви, равенства и свободы, заботливо хранилось за царскими дверями на престоле» (из выступления на торжественном Акте по поводу сорокалетия педагогических курсов Московского общества воспитательниц и учительниц 4 марта 1912 г.).
История педагогики (История образования и педагогической мысли) (Латышина Д.И. Учебное пособие, 2005 г.) https://studentam.net/content/view/1482/125/
Допущено Министерством образования Российской Федерации в качестве учебного пособия для студентов высших учебных заведений
Arastas
Я искренне недоумеваю, что вы хотели сказать этим комментарием. Он как-то поясняет появление этого эссе на Хабре?
iggr63
Да я именно о смысле. Увидел про теорему Флоке и подумалось, а кто поймет.