
Мы рады представить вам нашу очередную статью из цикла статей «Моделирование руками и глазами студента», посвященную разработке контроллера для аппарата искусственной вентиляции лёгких, выполненную в программном обеспечении REPEAT. Автором этой работы является студентка РГУ имени Косыгина Ульяна, которую мы благодарим за ее усердие и талант.
В статье подробно описана математическая модель и результаты моделирования, которые показывают, насколько эффективно программное обеспечение REPEAT может быть использовано в области медицинской техники.
Ссылка на телеграм-канал REPEAT: https://t.me/repeatlab\
Разработка контроллера для аппарата искусственной вентиляции легких
Гермогенова Ульяна Леонидовна, студент 4 курса, Института мехатроники и робототехники, кафедра Автоматики и промышленной электроники
РГУ им. А.Н. Косыгина, Москва
Вводная информация
Контроллер для аппарата искусственной вентиляции необходим для управления и регулирования параметров вентиляции, таких как давление, объем и частота дыхания. Он позволяет настраивать и контролировать процесс вентиляции, чтобы обеспечить оптимальную поддержку дыхательной функции пациента. Кроме того, контроллер позволяет наблюдать состояние пациента и адаптировать параметры вентиляции в соответствии с его потребностями. Таким образом, контроллер для аппарата искусственной вентиляции играет важную роль в обеспечении эффективной и безопасной поддержки дыхания у пациента.
Аппарат искусственной вентиляции состоит из следующих частей:
Центробежный насос (вентилятор)
Этот компонент создает давление в окружающем воздухе и выдувает воздух с объемным расходом Qout и давлением pout. Его вход является управляющим сигналом pcontrol.
Характеристики центробежного насоса определены из характеристик, которые обеспечивают идеальное соответствие целевого выходного давления pcontrol и фактического выходного давления. Вентилятор можно представить в виде динамической системы с инерцией. Следовательно, реальная система имеет спад на высоких частотах, который можно смоделировать как фильтр нижних частот второго порядка.
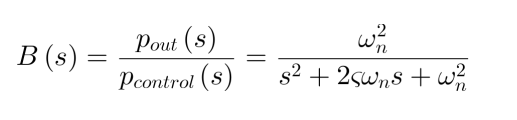
где ωn = 2π30, а коэффициент затухания ζ = 1, соответствующий реальным экспериментальным данным.
Для моделирования насоса на платформе REPEAT используем передаточную функцию, заранее вычислив коэффициенты числителя и знаменателя.
Воздушные соединители (шланги)
Воздух, выходящий из центробежного насоса, проходит через ряд шлангов, прежде чем попасть в лёгкие пациента. Шланг для утечки обеспечивает возможность выдыхаемому воздуху выйти из воздушных разъемов в условия окружающей среды (pamb = 0). Дополнительно он освежает воздух в разъемах при вдохе. Давление на конце воздушных соединителей, т. е. давление, подаваемое в дыхательные пути легких, составляет paw. Объемный расход воздуха в легких пациента составляет Qpat, а скорость потока утечки Qleak.
Вязкие потери в шлангах могут быть линейно смоделированы через сопротивления Rhose и Rleak длинного шланга и шланга утечки, соответственно. Таким образом, падение давления на этих участках пропорционально объемному расходу, как показано ниже:

Наконец, сохранение массы на стыке утечек дает:

Пациент (легкие)
Легкие будут реагировать на объемный приток/выход воздуха (Qpat) за счёт изменения легочного давления и за счёт объёмного расширения/сжатия.
Легкие, с помощью упрощенной модели, можно описать как сопротивление (линейные вязкие потери) Rlung последовательно с емкостью (соответствие легких) Clung. Следовательно, уравнения, описывающие механику лёгких, таковы:

где pext внешнее давление в лёгких, которое принимается равным нулю, и Clung рассчитывается соответственно этому предположению. Уравнение приобретает вид:


Таблица данных, по которым будут вычисляться и вводиться значения представлена ниже (Таблица 1).

Стадия моделирования
Для задания входного давления на аппарате искусственной вентиляции лёгких используем блоки “Константа”, “Время моделирования” и “Jython” (см. Рисунок 2). В константы соответстующе подаются значения целевого давления плато, положительного давления в конце выдоха, целевого времени подъёма, времени дыхательного цикла, соотношения инспирации и экспирации.

Код блока “Jython” представлен ниже (см. Рисунок 3).

Для моделирования центробежного насоса используется блок “Передаточная функция” с заранее вычисленными коэффициентами из библиотеки “Автоматика” (см. Рисунок 4).

Для комбинированной модели для соединителей воздуха и пациента (шланги и легкие) создан блок пространства состояний во внешнем проекте. Для его моделирования были использованы блоки “Усилитель”, “Сумматор”, “Интегрирующее звено” из библиотеки “Автоматика” (см. Рисунок 5).

Разработанный проект блока пространства состояний представлен ниже (см. Рисунок 6). Параметры блока задаются из значений A, B, C, D, которые вычисляются следующим образом:


Для ПИД-регулирования используется блок “ПИД-регулятор” и единичное усиление. В итоге получаем полную модель на общей схеме (см. Рисунок 7).

Результаты моделирования
Результаты моделирования были сняты с блоков “Усилитель” (номера 16 и 21) и представлены на графиках соответственно (Рисунок 8, Рисунок 9) для каждого параметра.


Регулировка переменного усиления
Стратегия переменного усиления может быть разработана на основе величины скорости потока пациентов Qpat. Основная идея заключается в том, что когда величина расхода Qpat высока (скажем, выше порога δ), можно использовать контроллер с высоким коэффициентом усиления. Напротив, когда объём низок, предпочтительнее использовать регулятор с низким коэффициентом усиления, который минимизирует колебания скорости потока.
Приведенный выше нелинейный коэффициент усиления переключателя ф может быть описан следующим уравнением:

где α - высокий коэффициент усиления. Вышеуказанный коэффициент усиления переключателя может быть применен к ошибке и передан в ранее описанный регулятор с низким коэффициентом усиления.
Проектируем нелинейный коэффициент усиления переключателя ф(Qpat) как новый подпроект. Схема показана ниже (см. Рисунок 10).

Вышеупомянутая подмодель теперь может быть включена в нашу систему для реализации схемы с переменным коэффициентом усиления. Полная схема показана ниже (см. Рисунок 11).

Таким образом, программное обеспечение REPEAT позволяет моделировать различную медицинскую технику. Мы надеемся, что эта статья послужит стимулом для дальнейших исследований.
Dynasaur
Что у вас на графике на рис.9? За 0.1 с объём воздуха в лёгких несчастного меняется с нуля до 110литров(???) А потом периодически падает скачком до МИНУС 80 литров??? Что вы вообще публикуете?