
В горнодобывающей промышленности для транспортирования полезных ископаемых из шахты на поверхность применятся много техники. Это самоходные установки, наклонные съезды с вагонами, шахтные подъемные установки (ШПУ или ШПМ). Вот о ШПМ мы и поговорим.

Они бывают разных типов, как по используемым подъемным сосудам (скип, клеть, бадья), так и количеством подвешенных подъемных сосудов (одноконцевые, двуконцевые). Очень много нюансов там, в плане механики. Посмотреть описание можно тут и тут.
Приводы тоже бывают разные. Постоянного и переменного тока. Для переменного тока это могут быть высоковольтные асинхронные электродвигатели с фазным ротором, синхронные электродвигатели, низковольтные асинхронные электродвигатели с короткозамкнутым ротором. Поговорим о ШПУ с высоковольтным асинхронным электродвигателем с фазным ротором.
На всех предприятиях, где происходит добыча полезных ископаемых, основным показателем успешной деятельности предприятия является количество добытой руды. В современной деятельности измерение веса добытой руды осуществляется множеством способом. Взвешивание автомобильного транспорта при транспортировке из места добычи в место переработки или хранения, железнодорожных вагонов, если таковые используются и т.д. Все это имеет место быть. Но такие системы дороги в плане капитальных затрат. А что если взвешивать вес поднятой руды на этапе её транспортировки в подъемном сосуде? Вполне возможно.
Масса груза транспортируемого подъемным сосудом, определяется по моменту подъемного двигателя или усилия развиваемого двигателем на окружности канатоведущего барабана. Измерение производится на прямолинейном участке, при постоянной скорости вращения двигателя. В это время усилие F на окружности радиуса R, равно сумме усилий, необходимых для транспортировки груза массой Мгр, а также на преодоление сил шахтного сопротивления Fш и сил статической неуравновешенности Fст поднимаемой и опускаемой ветвей подъемной установки:

Где, g – ускорение свободного падения, i – передаточное число редуктора.
Так как в точке «взвешивания» при движении с одной и той де скоростью силы шахтного сопротивления и начальная разница статических усилий остаются неизменными, то для вычисления массы поднимаемого груза необходимо из измеренного усилия F вычесть константы Fш и Fст.
Константы Fш и Fст могут быть вычислены на этапе пусковой наладке, под каждый конкретный подъем. Для этого достаточно поднять пустой сосуд и замерить силу, развиваемую двигателем, и в дальнейшем её отнимать из силы поднятия груза.
Также на любой подъемной установке кроме начальной статической неуравновешенности, из-за налипания руды на стенки сосуда, износа футеровки сосуда имеется переменная составляющая Fпер, которая меняется от цикла к циклу. На двуконцевых подъемных установках Fпер хоть и искажает вычисление массы груза по сравнению с фактическим, но практически не влияет на вычисление суммарной массы уже после нескольких циклов подъема. Так как оставшаяся руда в одном сосуде будет вычитаться из массы вновь поднимаемого груза в другом сосуде.
Если установка с сосудом и противовесом, то на этапе измерения, для минимизации влияния переменной составляющей, происходит следующее. Во время опускания пустого сосуда и подъема противовеса происходит измерение силы, развиваемой двигателем, она будет отличаться от силы во время тарировки на величину массы налипшей на сосуде и износа футеровки. А при подъеме сосуда, из силы необходимо вычесть разность сил, тем самым компенсировав переменную составляющую.
Усилие F, развиваемое двигателем переменного тока на окружности навивки радиусом R, определяется:

Где:
Эта формула справедлива для симметричной нагрузки, коей исправный электродвигатель и является.
Сигнал, пропорциональный току, снимается с вторичной обмотки трансформатора тока, имеющий стандартный токовый выход 0-5А. Сигнал, пропорциональный напряжению – с трансформатора напряжения.
Для измерения фазного напряжение двигателя необходимо установить трансформатор напряжения фазный, то есть с характеристикой 6000/v3 на 100/v3 вольт. Это дополнительные расходы. В высоковольтной ячейки управления двигателем уже установлены трансформаторы тока и напряжения. Правда трансформатор напряжения измеряет линейное напряжение с характеристикой 6000 на 100 вольт.
Имея два сигнала, тока и напряжения, вычислить остальные величины не представляет трудностей.
Действующие значения тока и напряжения одной фазы трех фазного напряжения в МК могут быть вычислены по следующей формуле.
Где:
Активная мощность одной фазы вычисляется по формуле.

Где:
Далее для расчета необходимо вычислить косинус фи.

Остальные переменные в формуле для вычисления силы, развиваемым двигателем являются константами.
Так как в высоковольтной ячейки установлен линейный трансформатор напряжения, то формулу для силы можно переписать с учетом линейного напряжения. Она примет следующий вид:

Но если у нас будут сигналы фазного тока и линейного напряжения, то активную мощность посчитать не получится, как и косинус фи, а косинус является, наряду с действующими значениями напряжения и тока, основной переменной в уравнении. Косинус фи будет изменяться в широких пределах во время работы двигателя.
Решений данной проблемы, как всегда, несколько.
Мы пойдем вторым путем.
Типовые включения трансформаторов напряжения представлены на рисунке.

Диаграмма трехфазного напряжения:
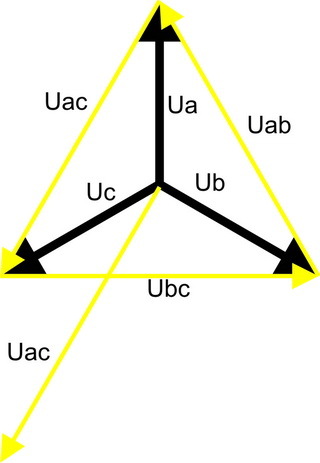
Угол между фазным напряжением Uв и линейным Uас составляет -90°. Напряжение вторичной обмотки трансформатора напряжения составляет 100 Вольт действующего напряжения, то есть 141 Вольт в амплитуде. В таком виде в МК не загонишь. Придется масштабировать.
Ну и необходимо фазу линейное напряжение заставить отставать на 90°, чтобы она совпала с фазой В. В этом нам может помочь обычный ФНЧ первого порядка – RC цепочка.
Основные характеристики RC цепи.
Передаточный коэффициент:

Угол сдвига фазы:

Так как угол со знаком «минус», это означает, что фаза выходного напряжения отстает от фазы входного на угол ?.
При использовании обычной RC цепи, мы «убиваем двух зайцев». Коэффициентом проводим масштабирование сигнала в пределах пары вольт, для обработки в МК. А имея фазовый сдвиг близкий к 90°, фаза синусоиды после RC цепи совпадает с фазой В, куда включен трансформатор тока. Следовательно, все вычисления силы, развиваемым двигателем, будет справедливы, если бы мы использовали фазный ток и напряжение.
Рассчитаем значения R и C, для нашего случая.
С трансформатора напряжения приходит 100 вольт напряжения (стандарт). Это действующее напряжение, следовательно, чтобы нам определить амплитудное значение умножим на корень из 2.
ИТОГО: Umax=U*1.41=141В.
Это синусоида, и она имеет как положительную полуволну, так и отрицательную. Значит, нам для МК необходимо эту синусоиду «вписать» в положительное однополярное напряжение.
Напряжение питание МК возьмем 3 в. Значит, средняя точка для синусоиды будет 1.5 вольта. Итого размах полуволны напряжения нам остается 1.5вольта. Отсюда коэффициент передачи RC цепи будет:

Теперь вычислим значение ?=RC, исходя из коэффициента К. Частота сигнала известна — 50 Гц.
После математических преобразований получаем: ?=RC = 0,318.
Отсюда

Угол нас устраивает. Вычислим погрешность измерений, при ошибки фазы в 0,57°, следовательно ошибка равна: (0,57°/90°)*100%=0,63%, это за четверть периода, следовательно за 360° и того меньше. Врядли трансформаторы тока и напряжения будут классом точности выше, чем 0,5%. Так что, искажениями, вносимыми нашем фильтром можно пренебречь.
Осталось рассчитать сами значения R и C. Отталкиваться лучше от конденсатора. Возьмем С=4,7 мкФ, отсюда R= ?/С=0,318/4,7*10-6=318*10-3/4,7*10-6=67,66*103 Ом или 67,66 кОм.
Номинал резистора стоит взять больше на 10 кОм, чтобы мы имели возможность измерять напряжение немногим более чем 6000 Вольт, где то эта величина может быть меньше, где то больше вольт на 400-500. К тому же угол ф немного увеличится, что повысит точность вычислений.
Датчик тока в нашей схеме будет являться интегральная микросхема ACS712ELCTR-05B-T, вот её pdf. Первичный прибором у нас выступает трансформатор тока с выходной характеристикой 0-5 А. Можно конечно его нагрузить на шунт небольшого сопротивления и далее через операционник, подогнать шкалу к требуемым пределам. По стоимости это ненамного удешевить разработку. А если применить ACS712 мы получим еще и гальваническую развязку в 2.1 kVRMS. Тоже ощутимый плюс.
С трансформатора напряжения можно снимать сигнал непосредственно и подавать его на RC цепочку для дальнейшей обработки. Но можно тоже гальванически развязать, ведь кабельная линия от первичных приборов, до устройства может быть приличной длины. Тут можно использовать линейный трансформатор не большой мощности с передаточным коэффициентом 1:1. Можно использовать и другой, лишь бы выходное напряжение соответствовало условию получения требуемой погрешности в сдвиге фазы и амплитуде после RC фильтра. Расчеты R и C для такого включения приведены выше.
Все эти сигналы после первичной обработки и нормализации значений можно загонять в МК и делать расчеты на основе полученной инфы. А отображать её уже кому как удобно и необходимо. Снабдить устройство каким-нибудь интерфейсом и предавать данные в скаду систему диспетчера подъема, например. Фантазия в этом плане почти безгранична.
Вот такая примерная схема получилась.
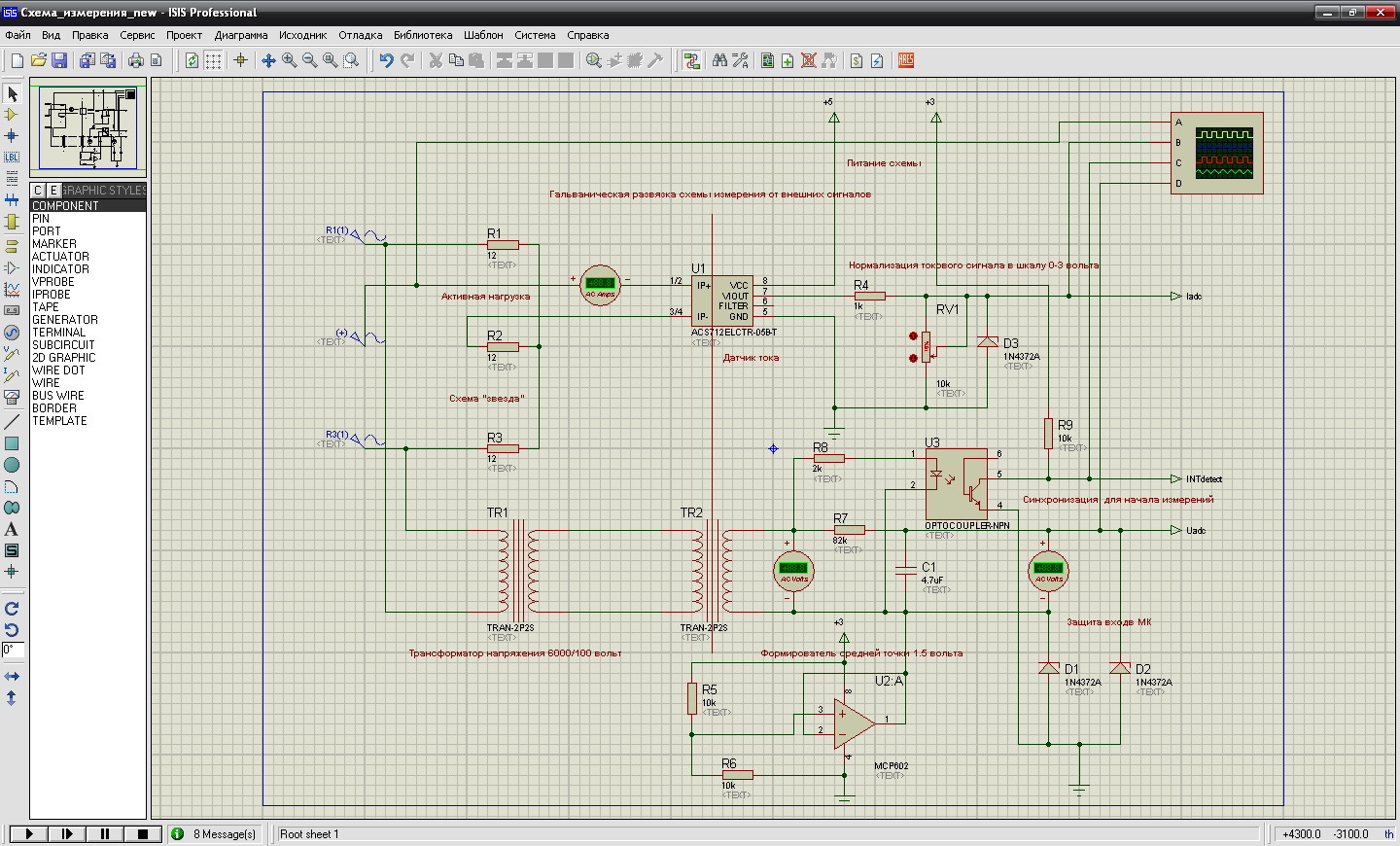 Картинка кликабельна.
Картинка кликабельна.
Использование оптопары в данном случае, обуславливается тем, чтобы синхронизировать начала проведения измерений с какой-то одной отправной точки. В данном включение выход оптопары будет детектировать положительную полуволну линейного напряжения Uac, то есть, когда напряжение после RC цепи будет в максимуме. Кто то скажет, что здесь родится погрешность измерения напряжения за период. Но так как мы его начинаем измерять всегда в одной и той же точке синусоиды пусть и не в нуле и проводить замеры нескольких периодов, то данный момент можно откорректировать коэффициентом. Тот же принцип действует и для тока.
Теперь, используя формулы для расчета действующих значений тока, напряжения и расчета активной мощности, можно вычислить необходимые переменные для вычисления массы. Остальные константы в уравнении являются особенностью каждой ШПУ.
В заключении короткое видео, демонстрирующее возможности работы данной схемы.
Архив с проектом протеуса находится здесь.
Измерение веса руды по току статора. Практика. Часть 1. Алгоритм обработки сигналов в МК
Они бывают разных типов, как по используемым подъемным сосудам (скип, клеть, бадья), так и количеством подвешенных подъемных сосудов (одноконцевые, двуконцевые). Очень много нюансов там, в плане механики. Посмотреть описание можно тут и тут.
Приводы тоже бывают разные. Постоянного и переменного тока. Для переменного тока это могут быть высоковольтные асинхронные электродвигатели с фазным ротором, синхронные электродвигатели, низковольтные асинхронные электродвигатели с короткозамкнутым ротором. Поговорим о ШПУ с высоковольтным асинхронным электродвигателем с фазным ротором.
Введение
На всех предприятиях, где происходит добыча полезных ископаемых, основным показателем успешной деятельности предприятия является количество добытой руды. В современной деятельности измерение веса добытой руды осуществляется множеством способом. Взвешивание автомобильного транспорта при транспортировке из места добычи в место переработки или хранения, железнодорожных вагонов, если таковые используются и т.д. Все это имеет место быть. Но такие системы дороги в плане капитальных затрат. А что если взвешивать вес поднятой руды на этапе её транспортировки в подъемном сосуде? Вполне возможно.
Не много теории и формул
Масса груза транспортируемого подъемным сосудом, определяется по моменту подъемного двигателя или усилия развиваемого двигателем на окружности канатоведущего барабана. Измерение производится на прямолинейном участке, при постоянной скорости вращения двигателя. В это время усилие F на окружности радиуса R, равно сумме усилий, необходимых для транспортировки груза массой Мгр, а также на преодоление сил шахтного сопротивления Fш и сил статической неуравновешенности Fст поднимаемой и опускаемой ветвей подъемной установки:
Где, g – ускорение свободного падения, i – передаточное число редуктора.
Так как в точке «взвешивания» при движении с одной и той де скоростью силы шахтного сопротивления и начальная разница статических усилий остаются неизменными, то для вычисления массы поднимаемого груза необходимо из измеренного усилия F вычесть константы Fш и Fст.
Константы Fш и Fст могут быть вычислены на этапе пусковой наладке, под каждый конкретный подъем. Для этого достаточно поднять пустой сосуд и замерить силу, развиваемую двигателем, и в дальнейшем её отнимать из силы поднятия груза.
Лирическое отступление
При таком измерении массы руды ювелирной точности добиться не удастся. И для коммерческого учета погрешность будет великовата. По грубым подсчетам она будет в районе 2-3%. Но для технологического учета эта погрешность приемлема. Плюс данного способа заключается в простоте и дешевизне устройства, в котором отсутствуют механические, критические узлы (тензодатчики, рамные конструкции и т.д., использующиеся в других системах взвешивания).
Также на любой подъемной установке кроме начальной статической неуравновешенности, из-за налипания руды на стенки сосуда, износа футеровки сосуда имеется переменная составляющая Fпер, которая меняется от цикла к циклу. На двуконцевых подъемных установках Fпер хоть и искажает вычисление массы груза по сравнению с фактическим, но практически не влияет на вычисление суммарной массы уже после нескольких циклов подъема. Так как оставшаяся руда в одном сосуде будет вычитаться из массы вновь поднимаемого груза в другом сосуде.
Если установка с сосудом и противовесом, то на этапе измерения, для минимизации влияния переменной составляющей, происходит следующее. Во время опускания пустого сосуда и подъема противовеса происходит измерение силы, развиваемой двигателем, она будет отличаться от силы во время тарировки на величину массы налипшей на сосуде и износа футеровки. А при подъеме сосуда, из силы необходимо вычесть разность сил, тем самым компенсировав переменную составляющую.
Асинхронный двигатель
Усилие F, развиваемое двигателем переменного тока на окружности навивки радиусом R, определяется:
Где:
- Uф, Iф – фазные напряжения и ток фазы двигателя,
- ф – угол между напряжением и током,
- w – угловая скорость (2*П*n/60, где n — частота вращения ротора двигателя),
- r – сопротивление фазы статора вместе с подводящим кабелем.
Эта формула справедлива для симметричной нагрузки, коей исправный электродвигатель и является.
Сигнал, пропорциональный току, снимается с вторичной обмотки трансформатора тока, имеющий стандартный токовый выход 0-5А. Сигнал, пропорциональный напряжению – с трансформатора напряжения.
Для измерения фазного напряжение двигателя необходимо установить трансформатор напряжения фазный, то есть с характеристикой 6000/v3 на 100/v3 вольт. Это дополнительные расходы. В высоковольтной ячейки управления двигателем уже установлены трансформаторы тока и напряжения. Правда трансформатор напряжения измеряет линейное напряжение с характеристикой 6000 на 100 вольт.
Имея два сигнала, тока и напряжения, вычислить остальные величины не представляет трудностей.
Обработка сигналов в МК
Действующие значения тока и напряжения одной фазы трех фазного напряжения в МК могут быть вычислены по следующей формуле.
Где:
- U,I – действующее значение напряжения, тока,
- АЦПi – мгновенные значения напряжения, тока замеренные АЦП,
- К – коэффициент обобщающий (коэффициент трансформации, коэффициент на единицу АЦП),
- N – количество замеров за период сетевой частоты.
Активная мощность одной фазы вычисляется по формуле.
Где:
- ui,ii – мгновенные значения напряжения, тока замеренные АЦП,
- N – количество замеров за период сетевого напряжения,
- К – обобщающий коэффициент.
Далее для расчета необходимо вычислить косинус фи.
Остальные переменные в формуле для вычисления силы, развиваемым двигателем являются константами.
Так как в высоковольтной ячейки установлен линейный трансформатор напряжения, то формулу для силы можно переписать с учетом линейного напряжения. Она примет следующий вид:
Но если у нас будут сигналы фазного тока и линейного напряжения, то активную мощность посчитать не получится, как и косинус фи, а косинус является, наряду с действующими значениями напряжения и тока, основной переменной в уравнении. Косинус фи будет изменяться в широких пределах во время работы двигателя.
Решений данной проблемы, как всегда, несколько.
- Установить фазный трансформатор напряжения в одноименную фазу с установленным трансформатором тока (дополнительный расходы, высоковольтные трансформаторы напряжения имеют специфические требования к установке и т.п.).
- Использовать линейный трансформатор напряжения, включенный в две соседние фазы. То есть, трансформатор тока включается в фазу В, а трансформатор напряжения в фазы А и С (в основе своей, такой трансформатор уже находится в высоковольтной ячейки, питающей электродвигатель).
Мы пойдем вторым путем.
Вспомним электротехнику
Типовые включения трансформаторов напряжения представлены на рисунке.
Диаграмма трехфазного напряжения:
Угол между фазным напряжением Uв и линейным Uас составляет -90°. Напряжение вторичной обмотки трансформатора напряжения составляет 100 Вольт действующего напряжения, то есть 141 Вольт в амплитуде. В таком виде в МК не загонишь. Придется масштабировать.
Ну и необходимо фазу линейное напряжение заставить отставать на 90°, чтобы она совпала с фазой В. В этом нам может помочь обычный ФНЧ первого порядка – RC цепочка.
Основные характеристики RC цепи.
Передаточный коэффициент:
Угол сдвига фазы:
Так как угол со знаком «минус», это означает, что фаза выходного напряжения отстает от фазы входного на угол ?.
При использовании обычной RC цепи, мы «убиваем двух зайцев». Коэффициентом проводим масштабирование сигнала в пределах пары вольт, для обработки в МК. А имея фазовый сдвиг близкий к 90°, фаза синусоиды после RC цепи совпадает с фазой В, куда включен трансформатор тока. Следовательно, все вычисления силы, развиваемым двигателем, будет справедливы, если бы мы использовали фазный ток и напряжение.
Рассчитаем значения R и C, для нашего случая.
Расчет фильтра
С трансформатора напряжения приходит 100 вольт напряжения (стандарт). Это действующее напряжение, следовательно, чтобы нам определить амплитудное значение умножим на корень из 2.
ИТОГО: Umax=U*1.41=141В.
Это синусоида, и она имеет как положительную полуволну, так и отрицательную. Значит, нам для МК необходимо эту синусоиду «вписать» в положительное однополярное напряжение.
Напряжение питание МК возьмем 3 в. Значит, средняя точка для синусоиды будет 1.5 вольта. Итого размах полуволны напряжения нам остается 1.5вольта. Отсюда коэффициент передачи RC цепи будет:
Теперь вычислим значение ?=RC, исходя из коэффициента К. Частота сигнала известна — 50 Гц.
После математических преобразований получаем: ?=RC = 0,318.
Отсюда
Угол нас устраивает. Вычислим погрешность измерений, при ошибки фазы в 0,57°, следовательно ошибка равна: (0,57°/90°)*100%=0,63%, это за четверть периода, следовательно за 360° и того меньше. Врядли трансформаторы тока и напряжения будут классом точности выше, чем 0,5%. Так что, искажениями, вносимыми нашем фильтром можно пренебречь.
Осталось рассчитать сами значения R и C. Отталкиваться лучше от конденсатора. Возьмем С=4,7 мкФ, отсюда R= ?/С=0,318/4,7*10-6=318*10-3/4,7*10-6=67,66*103 Ом или 67,66 кОм.
Номинал резистора стоит взять больше на 10 кОм, чтобы мы имели возможность измерять напряжение немногим более чем 6000 Вольт, где то эта величина может быть меньше, где то больше вольт на 400-500. К тому же угол ф немного увеличится, что повысит точность вычислений.
Немного схемотехники
Датчик тока в нашей схеме будет являться интегральная микросхема ACS712ELCTR-05B-T, вот её pdf. Первичный прибором у нас выступает трансформатор тока с выходной характеристикой 0-5 А. Можно конечно его нагрузить на шунт небольшого сопротивления и далее через операционник, подогнать шкалу к требуемым пределам. По стоимости это ненамного удешевить разработку. А если применить ACS712 мы получим еще и гальваническую развязку в 2.1 kVRMS. Тоже ощутимый плюс.
С трансформатора напряжения можно снимать сигнал непосредственно и подавать его на RC цепочку для дальнейшей обработки. Но можно тоже гальванически развязать, ведь кабельная линия от первичных приборов, до устройства может быть приличной длины. Тут можно использовать линейный трансформатор не большой мощности с передаточным коэффициентом 1:1. Можно использовать и другой, лишь бы выходное напряжение соответствовало условию получения требуемой погрешности в сдвиге фазы и амплитуде после RC фильтра. Расчеты R и C для такого включения приведены выше.
Все эти сигналы после первичной обработки и нормализации значений можно загонять в МК и делать расчеты на основе полученной инфы. А отображать её уже кому как удобно и необходимо. Снабдить устройство каким-нибудь интерфейсом и предавать данные в скаду систему диспетчера подъема, например. Фантазия в этом плане почти безгранична.
Вот такая примерная схема получилась.
Картинка кликабельна.Использование оптопары в данном случае, обуславливается тем, чтобы синхронизировать начала проведения измерений с какой-то одной отправной точки. В данном включение выход оптопары будет детектировать положительную полуволну линейного напряжения Uac, то есть, когда напряжение после RC цепи будет в максимуме. Кто то скажет, что здесь родится погрешность измерения напряжения за период. Но так как мы его начинаем измерять всегда в одной и той же точке синусоиды пусть и не в нуле и проводить замеры нескольких периодов, то данный момент можно откорректировать коэффициентом. Тот же принцип действует и для тока.
Теперь, используя формулы для расчета действующих значений тока, напряжения и расчета активной мощности, можно вычислить необходимые переменные для вычисления массы. Остальные константы в уравнении являются особенностью каждой ШПУ.
В заключении короткое видео, демонстрирующее возможности работы данной схемы.
Архив с проектом протеуса находится здесь.
P.S.
Продолжение:Измерение веса руды по току статора. Практика. Часть 1. Алгоритм обработки сигналов в МК