
Постановка задачи
Это вторая, итоговая статья. Напоминаю цель: есть двигатель постоянного тока. Задача — разработать, собрать и протестировать устройство, позволяющиее реализовать контур управления с заданием тока применительно к этому двигателю. Желаемое время переходного процесса на застопоренном двигателе (без противо-ЭДС) — не более 10мс.
Текст разбит на две статьи:
- 1. Измерение сопротивления и индуктивности двигателя
- 2. Разработка управляющего контура
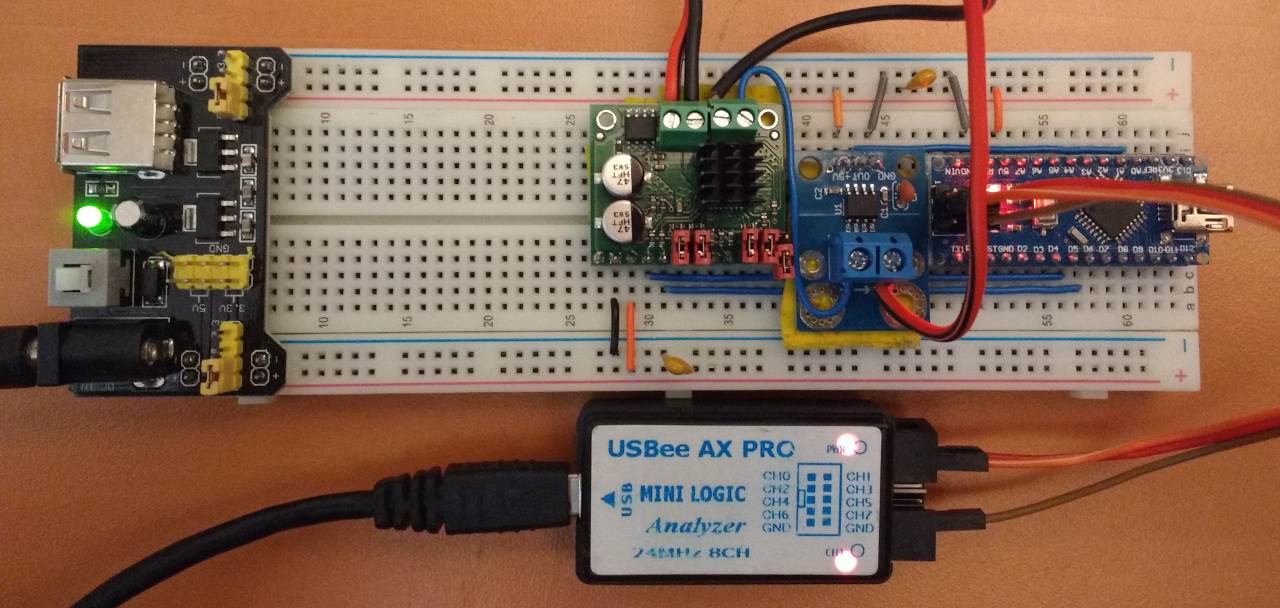
Напоминаю, как выглядит макет управляющего железа:
Желаемый результат
Вся система как чёрный ящик
Итак, вся затея состоит в том, что я хочу напрямую задавать силу тока, протекающего через мой двигатель. Если объединить контроллер и двигатель воедино, то я бы хотел получить примерно следующее:

Здесь J(t) — это задание по току, I(t) — это ток, протекающий через двигатель. Я бы хотел, чтобы входной и выходной сигналы были бы связаны по закону ? I'(t) + I(t) = J(t). Этот закон выбран произвольно, просто мне нравится такое дифференциальное уравнение. Умными словами оно называется апериодическим звеном первого порядка. Контроллеры, подчиняющиеся такому закону даже имееют свой собственный символ на некоторых схемах:

Вот реакция подобного звена на единичное ступенчатое воздействие:

Это красивая экспоненциальная сходимость без разнообразных колебаний, поэтому такая форма и была выбрана. Постоянная тау в формуле ? I'(t) + I(t) = J(t) называется постоянной времени, это то время, за которое процесс достигнет 63% своего конечного значения при реакции на единичный скачок. Если определить время переходного процесса как время достижения 98% конечного значения, то это примерно 5 тау. В постановке задачи у нас время переходного процесса не должно превосходить 10мс, поэтому возьмём ? = 0,002.
Приоткроем чёрный ящик
Если же чёрный ящик приоткрыть, то выглядеть он будет как-то так:

На вход чёрного ящика подаём сигнал J(t), на выход получаем протекающий ток I(t). Внутри чёрного ящика два подъящика: двигатель со своим диффуром, связывающим напряжение на клеммах U(t) с протекающим через него током I(t), и непосредственно регулятор, который должен подавать напряжение U(t) в зависимости от задания тока J(t) и реально протекающего тока I(t).
Давайте скажем, что регулятор берёт на вход ошибку E(t) — это разница между желаемой силой тока и реальной, и на выход даёт напряжение U(t). Наша задача найти диффур, который связывает E(t) и U(t), тогда будет понятно, как программировать ардуину контроллера.
Итак, мы хотим, чтобы задание тока и реальный ток были бы связаны по выбранному нами закону:
Применим к нему преобразование Лапласа (с нулевыми начальными значениями):

И составим следующую пропорцию:

На всякий случай, в теории управления эта пропорция называется передаточной функцией.
Определим ошибку E(t) как разницу между желаемой и реальной силой тока:

Для настройки контура тока зафиксируем вал двигателя, таким образом угловая скорость уходит из диффура двигателя:

В предыдущей статье мы вывели связь между напряжением на клеммах мотора и силой протекающего тока (при зафиксированном роторе):
Давайте поделим эту пропорцию на пропорцию из уравнения (1):

Почти закончили, осталось перейти от координат Лапласа к обычным временным. Для начала раскроем пропорцию:

Вооружившись таблицами преобразования Лапласа, можно увидеть следующее:

А это значит, что напряжение U(t) и ошибка задания E(t) должны быть связаны по следующему закону:
Таким образом, выбрав поведение всей системы как апериодическое звено первого порядка, мы получаем, что необходимый регулятор есть не что иное, как обычный ПИ-регулятор.
Воплощение в жизнь
Сишный код регулятора можно посмотреть тут. Программа вполне стандартная, единственное, что следует отметить, так это то, что у атмеги не хватает здоровья работать с плавающими точками. Поэтому вся работа ведётся с фиксированной точкой и целочисленными переменными.
Проверка работы регулятора
Для проверки работы регулятора зададим ему на вход меандр и синусоидальный сигнал.
Меандр
Вот тут можно взять данные эксперимента: из нулевого начального состояния зададим желаемую силу тока в I0=4А и измерим реально протекающий ток.
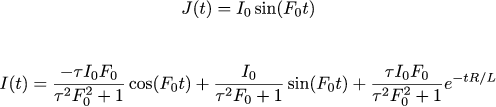
Затем давайте посчитаем на бумаге, по какому закону должен изменяться протекающий ток в таких условиях. Это один-в-один совпадает с тем, что мы делали в предыдущей статье:

Попробуем подобрать значение параметра, чтобы теоретическая кривая наилучшем образом аппроксимировала реальные данные и сравним с выбранной нами ранее постоянной времени. Код подбора параметра можно взять здесь.
Вот результат работы управляющего контура на полупериоде меандра:
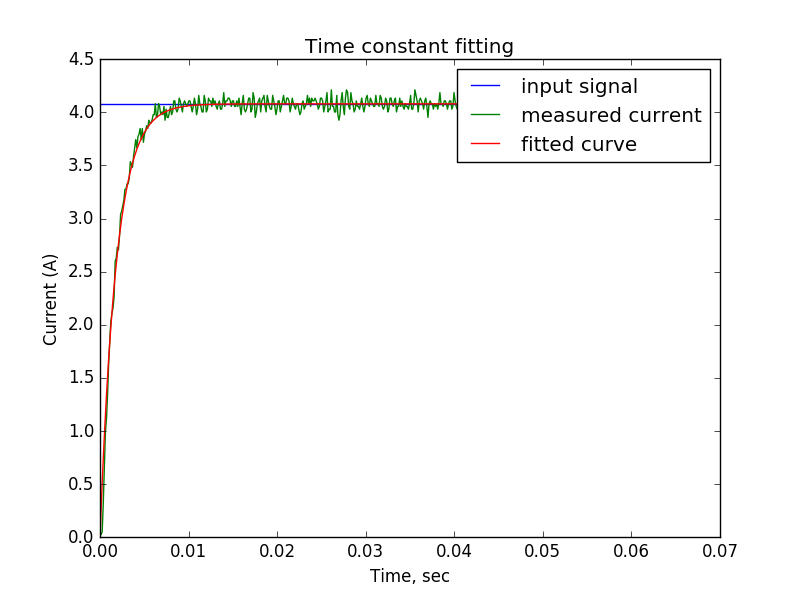
Метод наименьших квадратов нам говорит, что наилучшее значение параметра это .00184, что очень близко к выбранной нами постоянной времени .002. Хорошо видно, что переходный процесс уложился в десять миллисекунд, которые ему были отведены в постановке задачи.
Синусоидальный сигнал
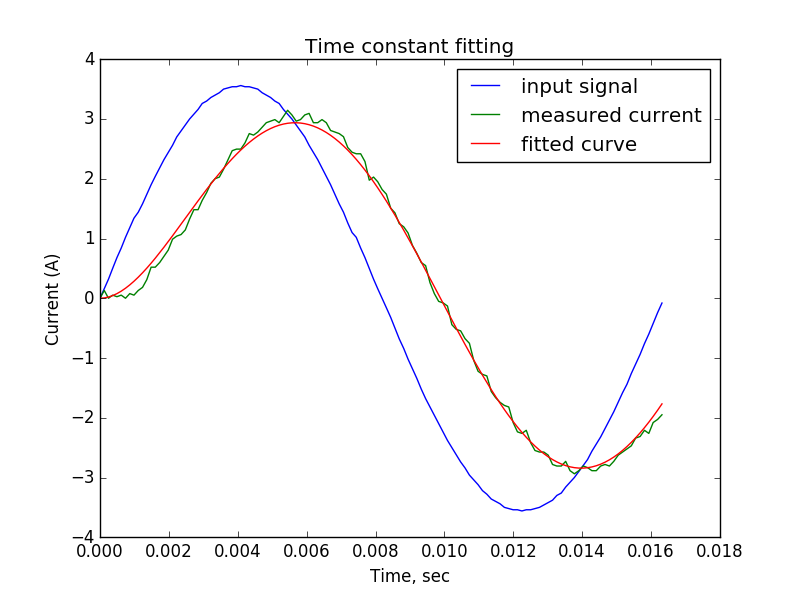
На всякий случай вторая проверка, опять же, вычисления все взяты из предыдущей статьи. При синусоидальном задании силы тока I(t) должна меняться по следующему закону:
Код подбора параметра теоретической кривой можно взять тут. Он нам говорит, что постоянная времени равна .00196, что опять-таки близко к расчётному параметру в 2мс.
Вот результат работы управляющего контура на синусоидальном входном сигнале:
Заключение
В общем, не так страшен чёрт, как его малюют. Большое спасибо arastas за науку! Постараюсь в обозримом будущем найти немного времени, чтобы собрать перевёрнутый маятник не так, как его делал (управляя напряжением), а управляя непосредственно силой тока, это должно упростить расчёты регулятора непосредственно маятника.
Комментарии (24)

HOMPAIN
17.11.2016 22:10Для чего сделана не прямая зависимость тока задаваемого от желаемого, зачем нужно плавное изменение? Почему нельзя просто мерить ток и если он больше, то питание отключается, меньше, подаётся?

haqreu
17.11.2016 22:20Ну почему нельзя, можно. То, что вы предлагаете, если я правильно понимаю, называется релейным регулятором, по-английски on-off controller.
При постоянном входном сигнале будет выдавать довольно мерзкие осцилляции выходного сигнала:

Для моих целей и с моими вычислительными ресурсами такое качество управления не подходит.HOMPAIN
17.11.2016 23:02Да, будет нечто такое, но в меньших масштабах. У вас частота ШИМ 20кГц, индуктивность мотора 6мГн и сопротивление 4.4 Ома. С такими параметрами у вас флуктуация амплитуды выходного сигнала будут в районе 2-4%. На вашем графике у вас шумы большей амплитуды.
haqreu
17.11.2016 23:06Ну не 20кГц, я ток могу измерять максимум с частотой 7.8кГц, хотя это мало что меняет. И да, релейное управление вполне имеет право на жизнь.

Arastas
17.11.2016 23:10У меня не сильно большой опыт, но в тех случаях релейного управления током «в лоб» что я видел, качество было невысоким, а чаттеринг — заметным.
Arastas
17.11.2016 22:55довольно мерзкие осцилляци
Лучше сказать — автоколебания. А если с высокой частотой, то чаттеринг.
Вообще, релейное управление, а точнее его современное расширение Sliding mode control, — достаточно популярное направление, со своими достижениями, проблемами и приложениями. Что интересно, очень много в этом направлении сделано пост-советскими учёными.
user343
17.11.2016 23:10Название статьи «делаем замкнутый контур тока» — как-то не совсем по-русски звучит.
Разомкнутый контур ТОКА сделать можно, но двигатель вращаться не будет.
Или автор на английском думает или может всё-таки
«контур управления с заданием тока и стабилизацией»?
>Фиттинг параметра
Новая непонятная калька с англ. — отклонение, разброс или допуск м.б.?
Студенты не поймут, даже если перед этим курс «электрич. машины» на русском 2 года учить будут.haqreu
17.11.2016 23:11Фиттинг в данном случае — подбор. И про кальки — да, моя вина. Я действительно книг по ТУ не читал. Closed-loop current control. Сейчас поправлю, спасибо
Arastas
17.11.2016 23:24А чем Вам не нравится «замкнутый контур тока»? Вполне устоявшееся выражение в ТАУ.
Разомкнутый контур ТОКА сделать можно, но двигатель вращаться не будет
Либо это неправда, либо я не понимаю, что Вы подразумеваете под разомкнутым контуром. Я думаю, что отсутствие обратной связи.user343
18.11.2016 01:34-1Контур регулирования тока изредка для краткости называют в ТАУ контуром тока. В конкретном разделе работы, после названия главы или другого указания контекста (http://portal.tpu.ru/SHARED/m/MALTSEVA/Student/Tab2/Tab/suepac.pdf).
Иначе, как тут в заголовке, возникнет путаница с контуром протекания тока. В теоретич.электротехнике: http://www.ngpedia.ru/id107826p1.html.
Разомкнутый контур управления — да, без обратных связей.
Омически разомкнутый контур — не пропускает ток.
«Распродажа Замкнутый Контур Тока Датчика и других китайских товаров со скидкой.» — плохой машинный перевод.
HOMPAIN
17.11.2016 23:47+2Фитинг по русски — это аппроксимация.
Fitting или Fit используется для аппроксимации во многих программах, математических пакетах на английском языке. Но как вы правильно заметили, на русском это слово в данном контексте не используется.user343
18.11.2016 01:40-1Спросил у lingvo 6, электронного словаря 1999 г.:
fitting of polynomial мат. подбор многочлена, приближенное изображение функциональной зависимости многочленом
fitting process мат. процесс подбора эмпирической кривой
fitting method мат. метод подбора (эмпирической) кривой
аппроксимация approximation

merlin-vrn
18.11.2016 08:41+1Термин "фиттинг" очень широко применяется при математическом моделировании, и здесь применён точно к месту. То есть, это ваша необразованность, а не косяк автора. Автор молодец.
maybe_im_a_leo
18.11.2016 05:06Годное пособие по ТАУ, респект!
Но если говорить конечно про практику, то релейное упрвление — тут что называется state of the art
И контур регулирования по току обычно так и реализуется в шаговиках или ДПТ, например миксросхема DRV8840.
То что там получаются колебания блуждающего спектра частоты решается добавлением в схему одного триггера, который сбрасывается с фиксированной частотой.
И постоянная времени конечно как минимум в 10 раз меньше должна быть для реальной практики.Arastas
18.11.2016 12:52Релейное управление даст приемлемые результаты при высоких частотах PWM, в том же DRV8840 PWM от 50кГц.
Да и то, на мой взгляд, это применимо в системах, где нет особых требований по точности. Если же говорить про высокоточные системы позиционирования, то там state of the art для контура момента включает в себя учёт пульсаций момента, мёртвого времени ключей и т.п. Ну и ПИ регуляторы.
А так, вообще, да. Любое PWM при желании можно трактовать как релейное управление. :)
Arastas
18.11.2016 12:59И постоянная времени конечно как минимум в 10 раз меньше должна быть для реальной практики.
Сильно зависит от задачи и электрической машины. Если, например, у Вас собственная электромагнитная постоянная времени двигателя это единицы миллисекунд, то для десятикратного форсирования может потребоваться более мощный источник. Если при этом есть заметная механическая нагрузка и быстродействие контура положения это десятые доли секунды, то никакого особого выигрыша от форсированного контура тока/момента не будет. Смысл тогда ставить усиленный источник?

armature_current
18.11.2016 06:27Задача — разработать, собрать и протестировать устройство, позволяющиее реализовать контур управления с заданием тока применительно к этому двигателю
Зачем Вам устройство стабилизации тока якоря? Это двигатель, а не катушка индуктивности. Он должен крутиться! И на заданных оборотах выдавать нужный момент, который в свою очередь пропорционален току якоря. Попробуйте почитать труды Шрейнера Р. Т., например "Системы подчиненного регулирования электроприводов".
Ну а по поводу методики изложения — вообще каша какая-то. Вот к пример фраза:
Это красивая экспоненциальная сходимость без разнообразных колебаний, поэтому такая форма и была выбрана
Неужели в пособиях по ТАУ теперь так принято?
bdvLP
18.11.2016 08:36Как вариант еще можно попробовать предуправление — дополнительно к выходу ПИ-регулятора добавлять компенсацию I(t)*R, по идее быстродействие должно возрасти
user343
18.11.2016 19:02-1Ещё работе не хватает практической и зрелищной проверки. Я бы уснул от таких формул :)
Взять ту же тележку, поставить на рельсы, задавать с клавиатуры разные токи, толкать этими импульсами, измерять пройденный путь.
Или например заставить двигатель через шкив поднимать гирьку токами 1, 2, 5 А в течение 1с.
Иначе обучающиеся не поймут практической важности всех этих теоретич. измышлений.
Вот пример с динамометром и лишней электромагнитной муфтой на валу:
https://www.youtube.com/watch?v=qnD3869QF1c
Тут шкала повеселее — человек с молотом получает звания «слабак/.../бугай/громила/кингконг»
https://youtu.be/AZRuhbAiq2guser343
20.11.2016 16:39Вот ещё забавный «useless box», мототележка с одной красной кнопкой:
https://youtu.be/i4U3O4-ym9s

unabl4
18.11.2016 21:28Спасибо за статью. Интересно.
А можно ту же самую задачу «решать» в т.н пространстве состояний?
https://en.wikipedia.org/wiki/State-space_representation
acronics
23.11.2016 21:34+1Очень приятно осознавать, что хоть кто-то ещё занимается прекрасным и нужным делом, требующим инженерной подготовки, а не участвует в разработке очередного веб-приложения с применением суперсовременных ИТ-технологий. Это такой бальзам на душу, серьёзно.
Спасибо за статью!
Crazy_Pit
очень даже интересно. прочитал поверхностно. но. все же спасибо. интересует также управление трехфазным двигателем с псевдо векторным управлением. если имеются наработки буду рад услышать.
спасибо за статью.