
Сегодня зарождающиеся отрасли воздушных и наземных беспилотных средств требуют надежного высокоточного позиционирования. Приложения на мобильных устройствах также требуют более высокой точности позиционирования. Эти средства должны быть малогабаритными, малопотребляющими и дешевыми. До сегодняшнего момента существовал разрыв между этими новыми требованиями и характеристиками продуктов и ценами. Гиганты навигационной отрасли не хотели или не могли предложить продукты с требуемыми свойствами.
Сейчас ситуация начинает стремительно меняться.
Грубо говоря, высокоточным называется позиционирование с точностью до сантиметров. Эта задача может решаться в локальной зоне, то есть, с опорой на некоторые базовые станции, а может без опоры, то есть в глобальном масштабе. Каждая из этих задач может решаться в реальном времени или по записи, то есть в отложенном режиме. Основная проблема, которую преодолевают на пути к точности, физическая — нестабильность задержки электромагнитной волны в ионосфере. Для компенсации ионосферной погрешности, которая доходит до двух метров, используют либо одновременный прием сигнала спутника на разных частотах, либо поправки с базовых станций при приеме на одной частоте. Основное преимущество двухчастотного приемника в отсутствии необходимости сети базовых станций. Естественно возможно смешение технологий, то есть, например, двухчастотная система с использованием поправок с базовой станции, где двухчастотность используется для ускорения сходимости навигационного решения и для увеличения его надежности при изменении доступности сигналов спутников.
Аппаратная часть высокоточных приемников, в том числе многочастотных и многосистемных, отрабатывалась десятилетиями и ее себестоимость невелика. Большие килобаксы, которые сегодня стоят двухчастотные приемники от лидеров рынка, в основном получаются за отработанный софт.
Несмотря на то, что основная сложность высокоточного оборудования лежит в программной плоскости, все началось с аппаратного упрощения. Минская компания НТЛаб разработала и запустила в серийное производство микросхему NT1065 — многосистемное многочастотное радиоприемное устройство. Грубо говоря, эта штука превращает сигналы с одной или нескольких антенн, количеством до четырех, в цифровые отсчеты. Она перекрывает все существующие и запланированные частотные диапазоны спутниковых навигационных систем. Эти системы и частоты подробно перечислены здесь.
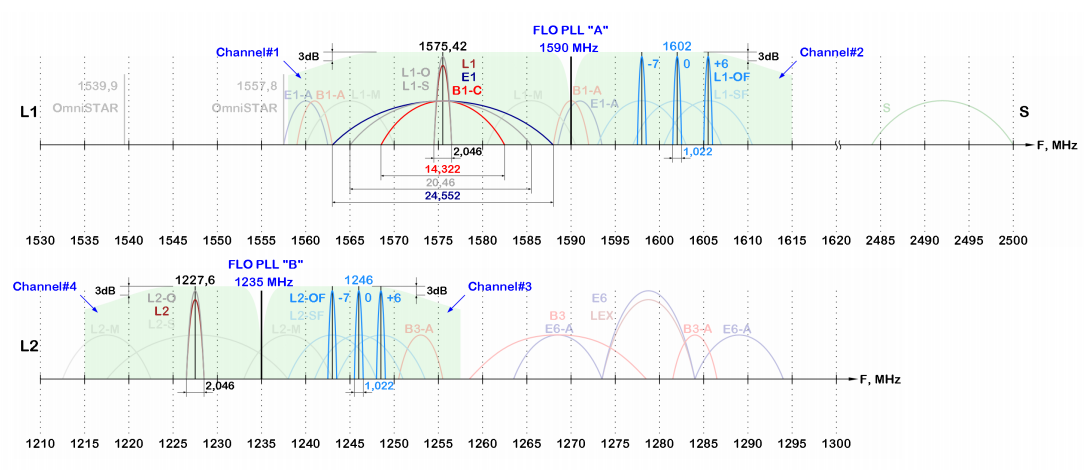
Вариант частотного плана NT1065
После вводной части о примерах новых средств для высокоточного позиционирования, я расскажу об опыте проектирования устройства на NT1065.
Эта часть про разные фирмы может показаться скучной. Осторожно, там нет ни одной картинки.
Как водится, сначала в эту авантюру полезли начинающие компании. Я не знаю, кто точно был первым из этих двух, назову в порядке, в котором заметил их анонсы. Первая — Swift Navigation, компания начинающая, но уже изрядно подрощенная. Она занимается RTK-решениями ( RTK — это высокоточная система позиционирования в реальном времени с использованием базовых станций), начинала на Кикстартере с open-source одночастотным устройством RTK. Сегодня они предлагают устройство Piksi Multi, которое работает в диапазонах L1 и L2 и обеспечивает сантиметровую точность всего за 595 долларов. За сумму менее 2000 долларов можно взять два комплекта с RTK-антеннами и системой связи для передачи поправок. Я думаю, это очень беспокоит гигантов рынка.
Вторая компания — Tersus GNSS. Платы приемников на вид не отличаются от плат Swift Navigation, просматривается тот же FPGA Zync. Также есть наборы с антеннами и системой связи. Здесь больше красочных описаний новых возможностей, которые предоставляет оборудование для беспилотных тракторов и коптеров. У них есть вариант приемника с двумя антеннами для построения угломерных высокоточных приемников. Такие приемники точно вычисляют истинный курс транспортного средства, что не всегда нужно, но вычислить его другими средствами очень непросто.
Таким образом эти две компании потихоньку отъедают кусок пирога гигантов отрасли, а те пока почивают на лаврах. Обе фирмы не раскрывают радио-микросхему, примененную в технике и сделавшую возможным такое быстрое вхождение на рынки гигантов, но по габаритам устройств можно понять, что это именно NT1065.
Спустя несколько месяцев до гигантов отрасли дошло, что, если они уже и разрабатывают что-то революционное, то настало время это все анонсировать, иначе все просто станут считать, что они выбыли в неизвестном направлении и перестанут заглядывать на их сайт.
Компания Trimble анонсировала изделие Catalyst. Они сразу ухватили суть революционного процесса — возможностей получать прибыли на железе будет все меньше. Поэтому они сделали точность позиционирования службой, сервисом. Пользователю достаточно будет купить за 350 долларов железяку и платить месячную плату за точность тогда, когда это нужно. От метровой точности за 40 баксов с месяц до сантиметровой за 350. При этом их железяка уже содержит антенну и подключается прямо к мобильному устройству по USB. Якобы железяка только передает оцифрованный сигнал, а смартфон или планшет выполняет программный приемник (SDR — software defined receiver). Непонятно, как они это делают, большой комп затыкается от навигационного SDR. Они пишут про некие особенные мобильные устройства, на которых должен работать их софт. Один знаток средств вычислений на GPU сказал, что это может быть OpenCL на мобильных устройствах (я не нашел много информации, если кто-то знает, прошу поделиться). Но это уже настоящая революция! Они хоть и не первые, но шансов получить первенство у них с такой штукой гораздо больше, чем у первых двух.
У Trimble наверняка есть свои решения для радиоприемной микросхемы, но вполне возможно, что им было выгоднее тоже поставить NT1065. Хотя есть посчитать деньги, то получится, что сделать такой РПУ на рассыпухе будет дешевле. Но лень — двигатель прогресса. Все стояло на месте, пока не появился чип, который очень просто запрячь в телегу.
Вторая компания — Tersus GNSS. Платы приемников на вид не отличаются от плат Swift Navigation, просматривается тот же FPGA Zync. Также есть наборы с антеннами и системой связи. Здесь больше красочных описаний новых возможностей, которые предоставляет оборудование для беспилотных тракторов и коптеров. У них есть вариант приемника с двумя антеннами для построения угломерных высокоточных приемников. Такие приемники точно вычисляют истинный курс транспортного средства, что не всегда нужно, но вычислить его другими средствами очень непросто.
Таким образом эти две компании потихоньку отъедают кусок пирога гигантов отрасли, а те пока почивают на лаврах. Обе фирмы не раскрывают радио-микросхему, примененную в технике и сделавшую возможным такое быстрое вхождение на рынки гигантов, но по габаритам устройств можно понять, что это именно NT1065.
Спустя несколько месяцев до гигантов отрасли дошло, что, если они уже и разрабатывают что-то революционное, то настало время это все анонсировать, иначе все просто станут считать, что они выбыли в неизвестном направлении и перестанут заглядывать на их сайт.
Компания Trimble анонсировала изделие Catalyst. Они сразу ухватили суть революционного процесса — возможностей получать прибыли на железе будет все меньше. Поэтому они сделали точность позиционирования службой, сервисом. Пользователю достаточно будет купить за 350 долларов железяку и платить месячную плату за точность тогда, когда это нужно. От метровой точности за 40 баксов с месяц до сантиметровой за 350. При этом их железяка уже содержит антенну и подключается прямо к мобильному устройству по USB. Якобы железяка только передает оцифрованный сигнал, а смартфон или планшет выполняет программный приемник (SDR — software defined receiver). Непонятно, как они это делают, большой комп затыкается от навигационного SDR. Они пишут про некие особенные мобильные устройства, на которых должен работать их софт. Один знаток средств вычислений на GPU сказал, что это может быть OpenCL на мобильных устройствах (я не нашел много информации, если кто-то знает, прошу поделиться). Но это уже настоящая революция! Они хоть и не первые, но шансов получить первенство у них с такой штукой гораздо больше, чем у первых двух.
У Trimble наверняка есть свои решения для радиоприемной микросхемы, но вполне возможно, что им было выгоднее тоже поставить NT1065. Хотя есть посчитать деньги, то получится, что сделать такой РПУ на рассыпухе будет дешевле. Но лень — двигатель прогресса. Все стояло на месте, пока не появился чип, который очень просто запрячь в телегу.
Приступим к изготовлению главного оружия революции. Основных ингредиентов два —
Рассмотрим, что же это за зверь — NT1065? Какие горизонты раскрывает для себя разработчик, имея такую штуку? Насколько проста она в освоении?
В целом, это вот такая штука:
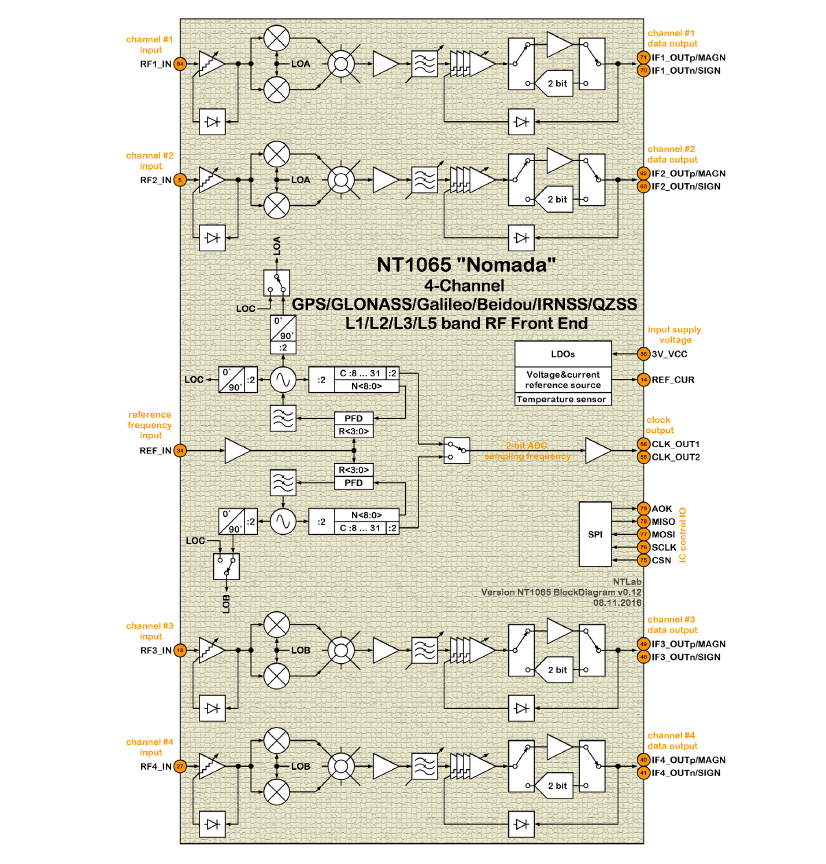
Четыре канала приема с отдельными входами и два гетеродина, которыми можно гибко записать смесители каналов. Вывести сигналы можно в цифровом и в аналоговом виде. Таким образом, можно реализовывать как настройку каждого канала на свой сигнал (с некоторыми ограничениями), так и синхронный прием одного сигнала на разнесенные антенны или антенную решетку.
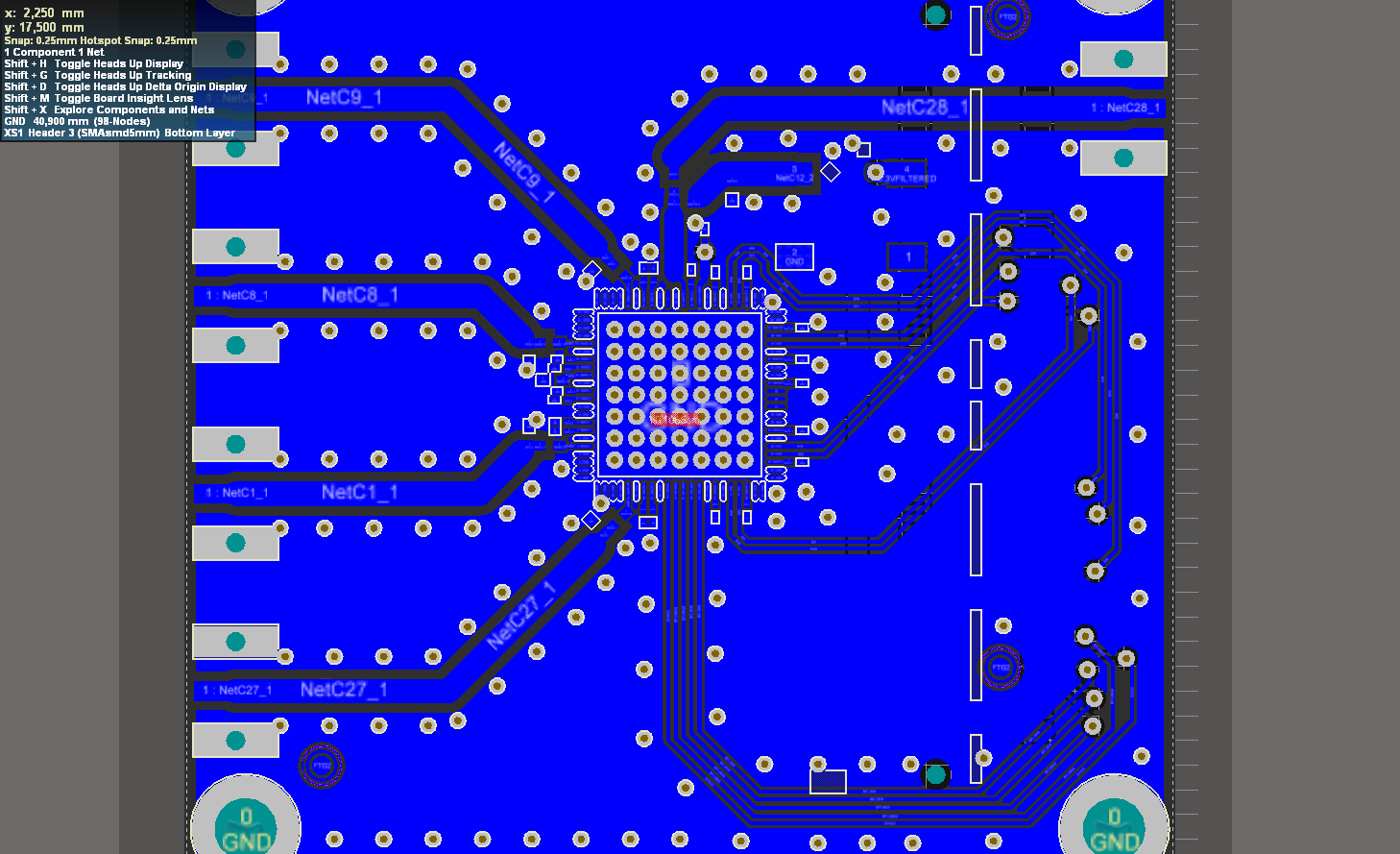
Теперь пройдемся по деталям. На первый взгляд, странно сделан подвод питания — только одну ногу микросхемы. Но при разводке эта странность превратилась в тыкву преимущество. Хотя в даташите эти парни рекомендуют четыре слоя, я легко уложился в два! С любой мало-мальски ногастой буржуйской микросхемой такое у меня не получалось.
Далее, они в даташите рекомендуют разделять земли каждого канала, чтобы переходные затухания были больше. Я даже почти убился и сделал такой вариант, но значительного увеличения развязки каналов не увидел. То ли измерял не так, то ли сделал неправильно. В общем, лучшее враг хорошего.
Итак, питание от 2.8 до 3.3 Вольт, ток всего-то 100 мА максимум. Правда надо выбирать источник питания с малыми шумами. DCDC здесь не подойдет. Опорный генератор тоже нужен малошумящий, с хорошей стабильностью частоты и температурно-компенсированный. Стандартные настройки поддерживают номиналы 10 МГц и 24.84 МГц. Чтобы использовать другой номинал частоты опорника, надо обратиться к разработчикам.
Выходной интерфейс тоже очень простой — такты и данные. Разрядов АЦП в каждом канале всего два, знак и магнитуда, что ввело меня на короткое время в состояние чванства (я на последней работе привык к 16-ти разрядам), но этого оказалось вполне достаточно. Зато частота дискретизации — до 100 МГц. Заводим такты на тактовый вход интерфейса GPIFII контроллера CYUSB3014, а данные на вход данных. Надо еще завести SPI для управления и аккуратно, под руководством даташита, сделать разводку и согласование импедансов на входе РПУ и наган готов.

У НТЛаба на сайте есть полная схема подобной платы.
С софтом еще проще, принять поток от Cypress FX3 на любой ОС очень просто: и под виндоуз, и под линукс можно использовать libusb. Под виндоуз также можно использовать родной драйвер от Cypress — никакой разницы.
На данный момент у меня есть набор софта (выложен на GitHub, ищите по слову NT1065).
Основной инструмент — это пара программ. Одна из них умеет надежно регистрировать на диск непрерывный сигнал с чипа, а вторая подходит для диагностики и демонстраций.
Есть возможность посмотреть спектр входного сигнала (можно подать сигнал с генератора, у кого есть).
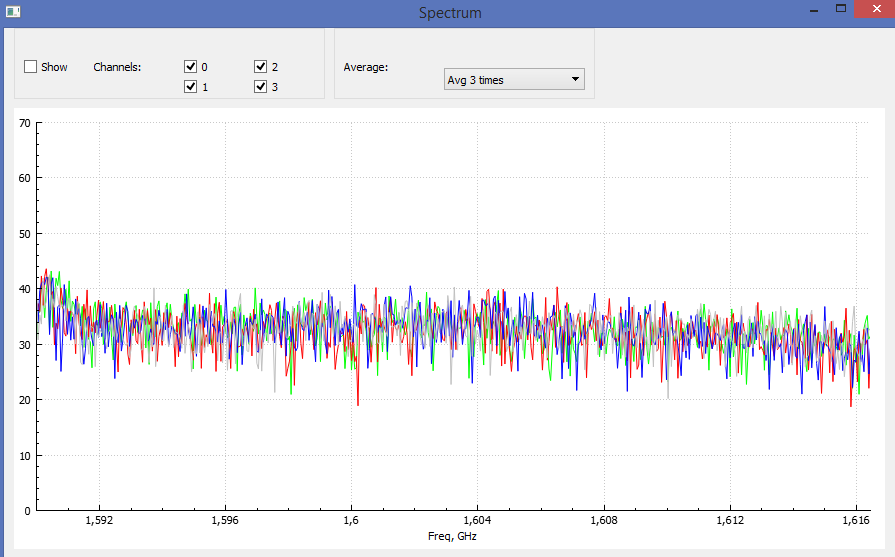
После подключения антенны простыми методами можно обнаружить сигналы спутников.
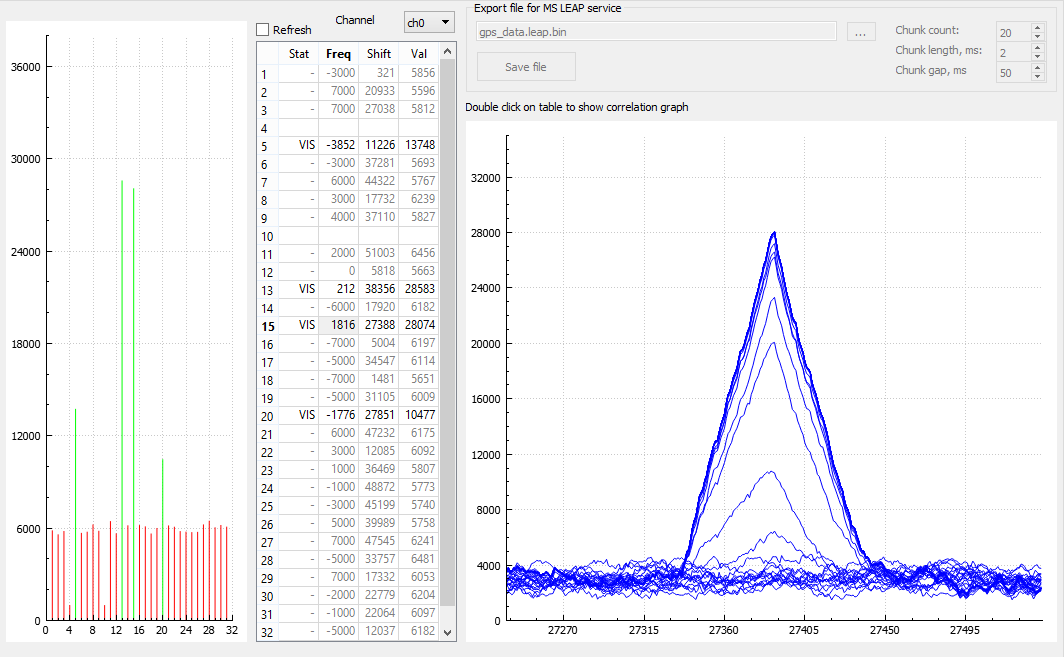
Причем не только GPS, а также ГЛОНАСС на частоте L1. И даже ГЛОНАСС на частоте L2! В отличие от американцев, наши передают открытый код стандартной точности и на L2 тоже.
Чтобы прямо из программы можно было выбирать GPS/GLONASS L1/L2 и видеть корреляцию — это я на днях встрою, там дел на полчаса (сейчас ручками код правлю для каждого случая).
Сейчас идет работа над Android-версией.
Теперь ваши возможности покорить мир ограничены только вашей способностью придумать и реализовать революционное устройство для спутниковой навигации!
P.S.
Эта статья является продолжением предыдущей в том смысле, что здесь рассмотрены средства, которые будут применяться для борьбы с помехами навигационным приемникам, о чем скоро надеюсь написать на Хабре.
Что мне лично остается неясным: как же это Trimble делает навигационный SDR на мобильнике? Я сначала посчитал это невероятным, но потом мне прислали табличку, где указана производительность современных вычислителей мобильных устройств. Поэтому я хочу расспросить народ об OpenCL-подобных технологиях для мобильных устройств. Есть кто-то, кто пользовался ими? Теоретическую производительность в попугаях я нашел, а нет ли где тестов мобильных GPU в таких задачах как, например, FFT?
Прошу прощения, предыдущий абзац про Trimble и OpenCL может быть непонятен, потому что текст про Trimble выше под спойлером, как возможно скучный. Если кому стало интересно, прочитайте вверху.
Ну и плакат довольно агрессивен и не точно соответствует указанному в заголовке периоду истории России. Чего же не сделаешь для красного словца?
Только зарегистрированные пользователи могут участвовать в опросе. Войдите, пожалуйста.
Поделиться с друзьями
apro
А уход опорного генератора тактовой частоты приемника? А тропосфера? Недостаточная точность эфемерид спутников?
itsar
Это величины другого порядка малости. Погрешность из-за ионосферы достигает 2-х метров. Уход опорного генератора приемника не имеет значения. Основная задача приемника — отслеживать частоту принятого сигнала. А она на спутнике задана очень точно.
Jef239
Погрешность эфемерид GPS — до 3 метров, эфемерид ГЛОНАСС — до 6 метров. Это погрешность, обеспеченна конечным числом разрядов в представлении эфемерид.
Погрешность из-за ионосферы можно вообще не учитывать, если делать RTK между двумя приемниками на расстоянии до 10-20 км. Ионосферные задержки у обоих приемников будут одинаковы и просто вычитаются друг из друга.
Что касается SDR у Trimble — гм, маловероятно. Вероятнее передача частичной псевдодальности (корреляторы!!) и фазы в полуциклах. А вот расшифровка эфемерид, восстановление псевдодальностей до полной, сведение полуциклов в циклы — на стороне мобильника.
То есть обычное деление между ПЛИС и ARM. В том же NV08 довольно слабый ARM 7 сидит. Но корреляторы явно не в нем реализованы. В GEOS-3 корреляторы совсем аппаратно сделаны, ARM там тоже довольно слабый.
itsar
Мне очень интересно, как у Trimble сделано.
Обещают в этом году продавать какие-то SDK.
Спасибо за интерес и замечания по теме!
Korogodin
Как вариант — скидывать выборку на сервер. Тогда от производительности мобильного устройства ничего не зависит, все козыри остаются на руках у Trimble. Подобный режим, насколько я помню, даже прописан в стандартах на A-GPS. Плюс наша контора, что-то типа Spirit Navigation, что-то такое практиковала.
itsar
Так можно, но при многих частотах и больших полосах, выборки будут объемными. Мне кажется, так будет медленно все обновляться. Лучше будет обработать на мобильном устройстве.
Strint имел дело только с GPS L1.
Еще у Микрософта есть проект CLEO по вычислению навигационного решения в облаке по выборке сигнала. Эта штука точно работает, проверено.
Jef239
Гм, в online A-GPS передаются результаты измерений (частичные псевдодальности). Это примерно 2-3 килобита. Для SDR (сырые данные с АЦП) нужен поток порядка 40-80 мегабит на диапазон (а диапазонов минимум 3).
Максимальная скорость загрузки в LTE — 75,4 мегабита. То есть тупо не хватит никогда. Не говоря уж о том, что 75.4 мегабита — это 4 базовых станции, занятых только под передачу.
itsar
В микрософтовском CLEO они прореживают поток отсчетов на порядок, поэтому получается вменяемое значение. Но при двухчастотном и высокоточном сигнале, я согласен, никакой сети не хватит. Точно надо корреляторы считать на мобильном устройстве.
Jef239
Ну я готов поспорить на большую шоколадку, что корреляторы у них в аппаратуре. Будете спорить?
itsar
Да! БШ будет моей.
Jef239
Договорились. Кто спор разрешит? Дождемся, пока DA1 кто-то из знакомых купит и посмотрим поток данных на осциллографе?
itsar
Да, дождемся, когда станет ясно)
Korogodin
Ширину канала всегда можно разменять на темп решения. Поставили ровер, нажали кнопку, он отправил данные на сервер, получил результат, выдал пользователю. Геодезист пошел к следующей точке.
Кроме того, 40 мегабит на диапазон — излишне. Сигнал может быть и однобитным, тогда GPS, например, можно упихнуть в 8 мегабит прям по выходу АЦП (компаратора).
Далее, можно сделать преднакопление, т.к. доплер известен, диапазон ужмется в килобиты.
Korogodin
Про доплер я погорячился =) Спутников же много…
Jef239
Стоп-стоп-стоп. Это же геодезия. Норма — часовые наблюдения с темпом 1 герц. Там же нужно не просто узнать координаты, а накопить данные для вычисления СКО. Ну хорошо, две частоты, высокоточные поправки, но все равно тысяча измерений для оценки СКО нужна. А это 16.5 минут.
Длина бита GPS — 300 метров. Коррелятор выдает порядка 3 метров, то есть сотой доли бита GPS. и я не понимаю, как на потоке в 8 мегабит будет такая точность корреляции. Примерно то же самое и с фазой, точность определения доплера — 0.01 герца. Хватит на это 8 мегабит?
itsar
Есть такая фирма Cell-Guide, которая и в 1 мегабит уложилась. Уважаемый Мишель Баваро, который, как говорят, недавно перешел работать в Свифт (наверно, уехал в Калифорнию), писал в своем блоге об их чудесном-логгере. (У меня, кстати, есть такой в наличии) У них вроде есть патент на эту тему. Суть в неравномерной дискретизации, они оцифровывают частотой 1.024 МГц GPS-сигнал с модуляцией 1.023 МГц.
Но про время накопления сложно спорить. Правда, по-моему, это все еще связано с ОСШ. Мы считаем его более-менее одинаковым для всех приемников. Так вот, если повысить его неким образом в несколько раз, например, с помощью разнесенного приема, то, я думаю, во столько же раз можно снизить требования к потоку или к времени накопления. Что думаете?
Jef239
Про поток не знаю, время накопления связано с изменением решения из-за изменения геометрии созвездия спутников. То есть измеряя только при одной геометрии можно получить ошибку не только от многолучевости, а ещё и от того, что все спутники — с одной стороны неба.
itsar
Согласен, от геометрии созвездия тоже зависит, особенно в условиях многолучевости. Так как созвездие меняется медленно, такую статистику можно условно назвать накоплением, только в геометрическом смысле.
Korogodin
Восемь мегабит я получил без замысловатых вычислений) Если взять сигнал GPS C/A с первыми боковыми лепестками (а большинство приемников этим ограничивается, даже геодезических), то это 4 МГц. Далее теорема Котельникова, получаем 8МГц. 8МГц при однобитном квантовании — 8 мегабит.
А про прореживание, я пытаюсь донести идею, что для геодезии необязательна непрерывная запись сигнала в течении всего часа. Т.к. мы в сети, то наш опорник неплохо известен. Можно устроить большую скважность записи, пропорционально порезать поток данных в среднем.
Jef239
Гм, мы же говорим не про результаты измерений, а про сырые данные с АЦП. Что будет с кольцами слежения за кодом и фазой при прореживании? Срыва слежения не будет?
Ну в общем я в этом не разбираюсь, приемники я не писал.
Korogodin
Фазовую неоднозначность придется заново разрешать ;) Тут вам, как специалисту по вторичке, виднее. Мне из общих соображений кажется, что использование вместо непрерывных часовых измерений набора сеансов некоторой длительности не должно сильно испортить результат привязки ровера. Вы ведь в течение часа не шумы усредняете, а различные систематические процессы. Многолучевость меняется в статике с периодом в несколько минут, смещение фазового центра и изменение рабочего созвездия — ещё медленнее… Отсюда я делаю вывод, что если продецимировать измерения, то проиграем только в шумовых процессах, а не они определяют итоговую точность.
Jef239
В статике фазовая неоднозначность разрешается один раз по сумме всех измерений. Это где-то минимум минут 15. Быстрой статикой можно разрешиться быстрее, копим — и на каждой секунде смотрим, хватает ли для разрешения. Но это тоже пара минут минимум (лучше минуты 4-5). А разрешение по одной эпохе возможно лишь когда дополнительная информация есть. Ну или совсем избыток спутников.
Так что если можно с одним разрешением фазовой неоднозначности — то все хорошо (соседние измерения мало информации несут для разрешения). А если каждый раз разрешаться — точность будет маленькая.
Но вот как удержать кольца слежения, если у нас оцифровка идет кусками — я не понимаю.
itsar
Мне тоже интересно понять, как они удерживают синхронизацию. В открытых источниках я нашел только микрософтовский CLEO. И там две статьи — одна и вторая — но там не могу найти на этот счет.
Jef239
C CLEON понятно — у них кольца слежения в софте. А приемник так и оцифровывает диапазон. Если скачать SDK, то там есть описание формата данных.
itsar
Понятно, что в софте. Но софт-то в облаке. Исходников не посмотреть.
Korogodin
Давайте упростим себе задачу. Пусть у нас идеальный опорник, поведение которого мы можем предсказать. Можем ли мы с точностью в +-10 см предсказать наперед фазовое сигнальное время (дальность до спутника и т.п.)?
Ответ на вопрос, очевидно, зависит от того, насколько «наперед». Можно провести исследование, тогда мы получим ответ на вопрос «насколько можно прореживать выборку сигнала».
Например, если мы можем предсказать фазовое сигнальное время на 10 секунд вперед, то записываем, скажем, 0.5 секунды, остальные 9.5 выкидываем. По 0.5 секундной выборке двойным проходом получаем кучочек процесса неразрешенной фазовой псевдодальности. Имея с прошлого раза экстраполяцию (которая была точнее длины волны) восстанавливаем обратно разрешенную фазу.
Получим примерно такой процесс, по которому легко можно решаться и выделять систематические процессы:
Это цифры для одночастотного приемника? Я так понимаю, что если подтянем вторую частоту, то всё будет намного лучше?
Jef239
10 см — это 0.33 наносекунды. Один таки процессора на частоте 3 гигагерца. У нас шумы квантования будут порядка 10 см.
Да, для одночастника, время разрешения с проверкой по второй базе. Типичное от 120 до 240 секунд. NV08 побольше, GEOS поменьше.
Korogodin
Т.к. в надежде на базовую станцию сотовой сети мы в первом приближении считаем опорник идеальным, то наш шаг дискретизации тут не при чем. Вопрос стоит так — можем ли мы с точностью в 10 см предугадать расстояние до спутника по линии визирования («псевдо»расстояние с учетом ионосферы и т.п.) немного наперед? Задача определенно имеет решение на некоторое \delta_\tau, тогда сколько составляет это \delta_\tau?
Jef239
прогноз точных эфемерид от ИАЦ ГЛОНАСС — порядка суток… Можете сами взять прогноз и сравнить с результатами финального расчета. Нестабильность ионосферы — скорее всего часы, но я с этим просто не возился.
Для сантиметров — нужно фазовое решение. Или вы синхронизируетесь с точностью сильно меньше полуволны — или каждый раз заново ищите неоднозначность. Так что частота процессора тут очень даже причем. Вы же должны понимать, сколько целых волн пришло в паузе?
Korogodin
Процессор — всего лишь вычислитель, осуществляющий постобработку данных. Причем тут его частота?
Давайте я напомню, что именно мы обсуждаем в этой ветке: можно ли сократить поток обрабатываемых сырых данных с АЦП от геодезического ровера за счет нарезки этих данных на небольшие кусочки с последующим выкидыванием некоторого их числа (прореживанием)?
Для наглядности, скажем: 500 мс выборка, потом 9500 мс выкидываем, потом ещё 500 мс и т.д.
По 500 мс оценить кодовую и фазовую псевдодальность можно. Но, если не применять дополнительных приседаний, то для каждого 500 мс участка придется заново разрешать фазовую неоднозначность.
Как можно избежать разрешения? Нам надо уметь экстраполировать псевдофазу на следующий интервал (который будет через 9500 мс).
Псевдодальность — разность сигнального времени (кодового или фазового) и времени приемника.
Время приемника можно пока оставить в покое (научиться синхронизироваться от сотовой сети, поставить водородник и т.п.).
Остается фазовое сигнальное время приходящего сигнала (полная фаза, иначе говоря). Она определяется движением спутника в основном. Можем ли мы на 9500 мс вперед предугадать изменение положение спутника с точностью порядка сантиметров? А на 1000 мс? А на 100000 мс? Если можем, то можем и «подхватывать» фазу в нужном цикле, продолжать давать решение. При этом имеем падение среднего цифрового потока в разы.
Jef239
Кто будет отмерять выкинутые 9500мс? Какое устройство? А точность отмерки — очень важна для фазового решения. Она должна быть меньше половины длины волны. То есть меньше 0.3нс
Положение спутника предугадать мы можем. А положение потребителя? Если мы стоим на месте, то нам первого решения хватит. Если движемся — то ничего предугадать невозможно.
ToSHiC
Вот тут мне не очень понятно (кстати, можете поделиться ссылками на теорию, желательно на русском?), неоднозначность же заключена в количестве целых длин волн, а не текущей фазы. То есть, если можно предугадать N (хотя бы в какой-то области, например, +- 2) для каждой псевдодальности, то для решения надо будет перебрать все варианты из конечного числа значений. Причём если основной вклад вносит нестабильность измерения времени, то и область для перебора существенно снижается, т.к. надо не область поиска увеличивать, а подвигать прогноз туда-сюда по времени.
Вдогонку: а что, если фазу не непрерывной считать, а дискретной, и вычисления свести к вычислению над полем Галуа?
Jef239
Теория есть в ГОСТ Р 53608-2009 :-) Предугадать N мы не можем. Цитата из ГОСТ:
3.1 Величина фазовой псевдодальности выражается в виде целого числа длин волн и дробной части длины волны. Дробная часть фазы может быть получена с высокой точностью, характеризуемой СКП на уровне первых единиц миллиметров. Прямое измерение целочисленной части фазы не представляется возможным, вследствие чего возникает неоднозначность фазовых измерений, требующая разрешения.
Решение действительно идет перебором с выяснением отношения качества лучшего решения к следующему. Когда это отношение превышает некий порог — считается. что мы разрешились. То есть разрешение неоднозначностей — процесс вероятностный.
Насчет поля Галуа не понял, не математик я.
Не очень понимаю, что именно вы не поняли. Мы рассчитываем неоднозначности один раз и дальше тянем фазовое решение. Если нам понятно, сколько прошло времени — мы знаем, что добавить в фазу, чтобы не разрешатся заново. Если знаем неточно — то увы…
Но, похоже, я тоже кое в чем неправ и если нарезать куски больше 6 секунд — то их можно наряжать неточно.
Korogodin
Все шкалы времени в нормальном приемнике задаются его опорным генератором. От этого опорного генератора, в частности, тактируется АЦП. Скажем, тактовая частота 10 МГц. 5e6 отсчетов отправляем, 95e6 отчетов выбрасываем, потом отправляем ещё 5e6 отчетов. Как-то так))
Да, если не принять мер, у нас этот ОГ будет валять. Но с ним что-нибудь можно сделать — взять водородник (у него за 10 секунд отклонение фазы на 1.5 ГГц оборот не сделает), попытаться засинхронизироваться от сотовой сети и т.п. Этот мне как первичнику понятно. Интереснее ваш опыт точных эфемерид ;)
Jef239
Ну если отсчеты более 6 секунд — мы синхронизируемся по смене строк кадра GPS.
А с эфемеридами — всё пока в процессе. Но на 2 часа расхождение пока в полуметре при апроксимации по одной точке. То есть мы берем на одно время бортовые и точные эфемериды, вычисляем их разницу (поправку) и смотрим, сколько времени мы можем протянуть на этой поправке. Ну до следующей поправки (через 15 минут) в общем уже тянем с нужной вам точностью.
Korogodin
С кадровой пересинхронизацией — это подход совсем в лоб. Если мы уж фазовое сигнальное время сможем от порции к порции восстанавливать, то с кодовым вообще проблем не будет.
Отсюда я делаю вывод, что такое прореживание потока можно без проблем устроить, если мы в качестве опорного генератора возьмем водородник и если нам не подгадят какие-нибудь ionospheric scintillation или другие процессы, вдруг резко меняющие наблюдаемую дальность по линии визирования.
Всё это для статики, конечно. И на 15 минутные паузы рассчитывать не приходится, за это время вальнет фазы на спутниках.
Осталось дело за малым — выкинуть из схемы водородник, заменить его на дешевое решение. Тут надо лезть в точность синхронизации в современных сотовых сетях.
Jef239
Или у нас 10 см точности по каждому спутнику — или нам нужна статика. Потому что с 10 см на спутник — у нас и разовое измерение будет с сантиметровой точностью.
Весь смысл статики — найти неоднозначность по большой матрице. Но для 10 см на спутник — нам уже нужно знать фазовое решение.
В итоге смысл статики после нахождения фазового решения просто непонятен.
Korogodin
К сожалению (или к счастью?) у меня нет опыта активного использования геодезического оборудования. Но как я себе представляю работу с ровером Trimble Catalyst.
Нужно отбить точку на плане (пенек на полянке в лесу). Расчехляем Trimble. Ставим на треногу, включаем, ждем минут 20.
Что происходит за эти 20 минут?
Ровер (в облаке от АЦП, по корреляционным суммам, по псевдофазам непосредственно в местном вычислителе/в облаке — это вопрос реализации и спора на шоколадку) начинает обрабатывать сигналы. Так или иначе он их находит, переводит на слежение, синхронизируется, начинает формировать псевдофазы и псевдодальности. На это у него уходит порядка минуты.
Вот мы имеем псевдофазы и псевдодальности от 10-20 спутников. Учитываем тропосферу, ионосферу и т.д., получаем float решение и его ковариационную матрицу.
Если приемник двухчастотный, то ионосферу мы отсеили хорошо, ковариационная матрица приличная, мы почти сразу с помощью LAMBDA разрешаем неоднозначость, получаем fixed решение. Это если нам повезло с многолучевостью, иначе немного ждем.
Я эту фразу понимаю так. Если приемник одночастотный, то LAMBDA с ходу может и не сойтись. Тогда в матрицу начинаем запихивать измерения для нескольких моментов времени для получения избыточности.Так?
Оставшееся время ровер стоит усредняя разные картины многолучевости. В статике в 10-20 минут как раз войдут несколько периодов многолучевости.
Всё что написано выше, только кратко: по моему мнению, ровер оставляют в статике ради того, чтобы он успел пронаблюдать процессы с большим временем корреляции (многолучевость, спутниковое созвездие).
Jef239
Ну я тоже не геодезист. В целом статика — это постообработка. В геодезии используется постообработка по нескольким базам с уравниванием результатов измерений.
Малое время накопления чревато ложными решениями. При этом соседние измерения — хорошо коррелированы друг с другом. Как там по двум частотам не знаю, а при решении по одной частоте ложное решение может держаться секунд 15. А вот суммарная матрица — имеет намного меньшие шансы для ложного решения. И чем за больший период мы накопим — тем большая вероятность истинного решения.
Но то, о чем вы говорите — тоже имеет место.
Вообще у геодезии довольно сильная нормативная база. как пример ГКИНП 01-271-03 «Руководство по созданию и реконструкции городских геодезических сетей с использованием спутниковых систем ГЛОНАСС/GPS»
Korogodin
Я пока так и не уловил, что вы имеете в виду под суммарной матрицей?
Jef239
Возможно, что это наше know-how. я просто не знаю, что можно рассказывать публично.
itsar
Если говорить, как делают люди, то у логера CellGuide параметры были от 64 миллисекунд до 1 секунды выборка и пауза до минут. Эти точно все процессы перезапускают заново.
У микрософтовского CLEO выборка 2 мс и через 20 мс следующая. Вот у них можно что-то тянуть от предыдущей выборки.
Но ни те, ни другие не делают RTK. Пока по крайней мере.
Jef239
Думаю, что как у всех. Антенна -> МШУ -> гетеродин+смеситель -> АЦП -> БПОС -> DSP или ПЛИС -> CPU
Вот функции CPU они и выкинули на мобильник.
Устройство 1879ВЯ1Я видели?
itsar
С точки зрения техники, я думаю, что там будет именно SDR на мобильном устройстве. Иначе им в цену 350 баксов не уложиться. Вряд ли они станут работать на уроне себестоимости.
У Trimble в России есть разработчики. Пора им тут высказаться)
С точки зрения маркетинга, геодезистам будет выгодно покупать точность только в те месяцы, когда она им нужна. Следующий уровень — платить не за время, а за навигационные отметки.
Jef239
А чем они хуже разработчиков игровых приставок? Те вообще ниже себестоимости продавали. Зато наваривались на играх. Тут то же самое — плата за время перекроет потери в низкой цене…
А потом себестоимость приемника — это больше плата софт, а не за железо. Железо при массовом тираже стоит копейки. Мобильник на андроиде можно купить за 40 баксов, и это не себестоимость, а продажная цена. Так что цена железа — баксов 10, не больше. Все остальное — оплата за софт и разработку.
Исключение — антенны. Дешевых геодезических антенн не бывает… :-)
itsar
Не могу не согласиться про софт, но железо все же будет явно дороже 10 баксов.
Значительное удешевление антенн возможно при большом количестве.
Jef239
Почему? Дешевый андроид — порядка 2 тысяч рублей, то есть 30-40 баксов. Себестоимость полцены, то есть 15-20 баксов. Половина этого — экран с сенсором. Остается 7-10 баксов. Думаете в мобильнике железо проще, чем в приемнике? Там же тоже МШУ, DSP и процессор.
Это согласуется с ценами на GEOS-3 и U-Blox. Продажные 15-20 баксов, себестоимость 7-10 баксов.
Дорогие части у нас в антенне — это сам приемный элемент и полосовой фильтр.
Насколько дешевой может быть RTK-антенна при массовом производстве? И почему этого пока никто не сделал?
itsar
Кроме модуля за 7-10 баксов там еще много чего будет.
Антенну можно сделать за несколько долларов. Особенно будет хорошо, если интегрировать ее сразу с модулем. Но нужны количества в порядках десятков тысяч.Я думаю, Tallysman уже сделал это)
Jef239
За несколько долларов со стабильным фазовым центром?
itsar
В десятках тысяч штук. Главное, чтобы настройка не понадобилась. Надо сильно вложиться вначале и дальше все будет так. Но цена ошибки в дизайне или в процессе производства будет тоже велика. Поэтому легко вылететь и до десятки в локальный промежуток времени.
Тут главный вопрос — куда деть потом эти десятки тысяч? Кому оно надо столько штук?
Jef239
Об этом лучше бы по телефону. Или в личке.
itsar
Уважаемый Jef239, а какой сейчас самый дешевый приемник с сырыми данными, подходящий для RTK?
Jef239
Мы используем GEOS-3MR и GEOS-3R. U-Blox — дешевле, но я не знаю, какого качества там фаза. Когда-то (лет 10-15 назад) была отвратительная. Но время же не стоит на месте.
Речь ещё о том, какой именно RTK нужен. У GEOS чистая фаза, но много слипов. Более того — полуцикловых слипов. Автор обещал побороть, пока что ждем. У NV08 слипов мало, но шум фазы побольше.
Наш выбор: для статики лучше NV08, для динамики (собственно RTK) — GEOS.
itsar
Спасибо, получается дешевле 15 баксов нет. Мотаю на ус.
Stchee
А в Beidou оно сможет?
itsar
Да, может B1, B2 и B3. Но одним чипом только парами. Все три сразу не получается. Посмотрите в даташите красивые картинки с конфигурациями начиная со страницы 34.
electronus
Спасибо, буду следить за темой с интересом
itsar
Спасибо! Надеюсь оправдать ожидания.
Для темы борьбы с помехами навигации важно, что NT1065 позволяет преобразовать в цифру синхронно четыре канала. На его базе можно строить пространственные компенсаторы помех.
Korogodin
Для этого потребуется, как минимум, заменить штатные АЦП внешними многоразрядными.
itsar
Для начала буду пробовать так, с двумя разрядами. Принцип от этого не изменится.
NelSon29
Принцип изменится в том плане, что при двухбитном квантовании РПУ перестаёт быть линейным. То есть вместо одной помехи лезет сразу множество.
А ещё при работе с NT1065 мы заметили на спектроанализаторе достаточно сильную третью гармонику, что немного огорчило
itsar
Как упремся в линейность, перейдем на более линейный АЦП. Железо есть такое.
А про третью гармонику можете подробнее рассказать. Как ее смотрели?
NelSon29
В линейность упрётесь почти сразу же, т.к. квантование на два бита синусоиду превращает в четырёхступенчатый меандр с соответствующим спектром. Соответственно, одна узкополосная помеха сразу превращается в множество. Со спуфингом, возможно, это будет не так критично.
Подавали гармонику на вход с частотой ±1590 МГц и смотрели выход спектроанализатором. На сколько она была ослаблена относительно основной я не помню, но, если интересует, в понедельник спрошу у коллег.
Гораздо больше поразило при работе с этим РПУ следующее:
1. На выходе тактового сигнала стоит трансформатор, который режет клок с частотой меньше ~40-50 МГц. Такой трансформатор стоит на старой отладочной плате (которая без встроенного USB) и, если судить по документации, на новой.
2. Если на вход подавать одну гармонику, то при включённом АРУ практически нет разницы, какие настройки фильтра установлены. У нас получилась полоса фильтра порядка 70 МГц при установленных 11. Связались с белорусами и узнали, что дело в АРУ и полосы фильтров указаны при фиксированных значениях усиления.
itsar
Что касается квантования, то, по-моему, дело не в этом, а в линейности выходного усилителя. Каждый усилитель — элемент нелинейный. Весь вопрос только в уровне, который на него подают и его способности работать в линейном режиме с таким уровнем на входе. Любой усилитель можно перегрузить.


Я вот прямо сейчас снял спектры, подав частоту 1587 МГц. На первом уровень сигнала такой, что гармоники еще не вылезают из-под шумов.
На втором уровень сигнала на 10 дБ больше и помехи уже вылезают из под шумов.
В гармониках самое хорошее то, что они уменьшаются быстрее, чем уменьшается основная сигнал. Таким образом при уровнях на входе менее некоторых, влияние гармоник будет незначительным. Это демонстрируется графиками спектра.
1. Что касается трансформатора на клоке. Клок можно вывести в режиме CMOS, но тогда его гармоника наводится на вход РПУ и снижает характеристики при работе в некоторых диапазонах частот. При клоке LVDS наводка меньше, поэтому у них там стоит трансформатор. У меня на плате стоит LVDS-преобразователь, который пропускает и маленькие частоты. Они, видимо, посчитали непрактичным использование частот дискретизации менее 40 МГц. Я пока тоже не сталкивался в надобностью маленьких частот дискретизации.
2. Измерить АЧХ фильтров в режиме АРУ нельзя в принципе. Собственно, они Вам об этом и сказали. АЧХ фильтров у них приведены в даташите. Я их проверять не пробовал, верю им на слово. Да и вопрос это для обычного приема не очень важный, дальше все равно навигационный сигнал фильтруется. Для практической помехозащиты это имеет значение. Если Вы выявите несоответствие полосы заявленной, прошу сообщить общественности.
Большое спасибо за интересные комментарии!
NelSon29
Согласен, любой усилитель можно перегрузить. Но даже если усилители внутри РПУ работают в линейном режиме, поставив на выходе 2-битовый АЦП, на выходе помимо основного тона увидим и гармоники.
Если я правильно помню, то при уровне входного сигнала порядка -70 dBm третья гармоника была сильнее. Увы, сейчас не могу проверить, дома нет оборудования.
2. «Дальше навигационный сигнал фильтруется». Какую фильтрацию вы имеете в виду? Хотелось бы узнать поподробнее.
itsar
2. Это я про корреляторы.
hardegor
У NTLab есть более новый даташит на NT1065
itsar
У них там каждый новый даташит лежит со своим URLом.
Спасибо, ссылку все равно поправлю.
Pavel9860
Не совсем понятно в чем именно революция для высокоточного позиционирования?
Ионосферные поправки улучшают точность до 1 м максимум до нескольких дециметров, для сантиметровой точности нужны системы RTK (Real Time Kinrmatic) с базовой станцией или 3-х частотные системы.
С точностью до сантиметров позиционирование можно собрать на RTCLIB за 100$ из перепрошитых ubolx neo n8m и Orange pi
или за 500$ купить готовые модули Emlid с антеннами получше и без танцев с бубном. Дальность 8-10 км от базовой станции против 35-50 для 2-х частотных решений.
Профессиональные 2-х частотные решения стоят ~20k$ за комплект из с базовой станцией, 6k$ для для одночастотного. Но это профессиональное кондовое оборудование с гарантией, поддержкой и обучением. Можно взять бу за четверть этой суммы, для игрушки дороговато, при работе себя окупит довольно быстро.
Китайские 2-х частотные модули стоят 1500$. В принципе на паре таких можно собрать неплохие вещи.
Для летающей техники точность в 1 м как правило достаточна, в том числе и для большой авиации.
Для сельхоз применения и за городом достаточно одночастотных приемников с RTK и сети базовых станций.
Для города в любом случае нужны высокоточные инерциальные навигационные системы или разметка и лидары.
На мой взгляд развитие навигационных систем будет идти в следующих направлениях
3-х частотные системы дадут точность в сантиметры без базовых станций. В GPS и Galileo запускаются и заменяются спутники на 3-х частотные. Пока спутников мало, третья частота может быть закрытой или платной.
Система дифференциальной коррекции даст метровую точность, глобальная будет доступна из любой точки региона, для которого происходит вещание поправок, т.к. передача идет через спутники. Локальная система может быть создана довольно бюджетно и предавать поправки в интернет. Глобальная СДКМ есть во многих регионах, в РФ тоже есть, но не совсем работает.
Системы высокоточных геодезических базовых станций с передачей данных RTK. Такие сети есть в большинстве стран, где-то сплошная зона покрытия, где-то частичная. Система не бюджетная, требует бетонирования реперных точек, 100% аптайма и задержек в передачи данных до потребителя менее 0.1 с. Доступна как правило по подписке.
Когда в мобильную технику начнут встраивать приемники, способные передавать весь поток сырых данных, тогда можно будет получать сантиметровую точность при наличии поблизости базовой станции с привязкой к координатам. Или получать высокоточные координаты относительно другого девайса. Что тоже неплохо для съемок, газонокосилок и других бытовых вещей.
itsar
Классно написано! Все правильно. Вот только эти две указанные фирмы уже делают двухчастотные модули вдвое дешевле 1500 баксов. И революция в том, что это только начало.
Я прошу, для общего развития, дайте ссылку на китайцев с двухчастотными модулями за 1500.
Pavel9860
https://russian.alibaba.com/product-detail/gnss-gps-module-k108-k508-60169100820.html 198 каналов
Здесь 1600$, когда хотел купить были предложения за 1500
https://www.javad.com/dynamic/Shop/Product/65 216 каналов модуль 3000$
https://www.javad.com/dynamic/Shop/Product/97 216 каналов модуль 4000$
Для приема 1 сигнала со спутника нужен 1 канал. Во большинстве новых приемниках не менее 36 каналов.
В самих приемниках Tersus 192 канала в Piksi 22 канала(что маловато для 2-х систем GPS и ГЛОНАСС), т.е. должно быть 6 чипов в Piksi или 48 чипов в Tersus, если считать, что в каждом чипе NT1065 4 канала. Как видим абсолютно нереально.
Так что фразу «Обе фирмы не раскрывают радио-микросхему, примененную в технике и сделавшую возможным такое быстрое вхождение на рынки гигантов, но по габаритам устройств можно понять, что это именно NT1065.» как понимаю можно считать шуткой.
itsar
Большое спасибо за ссылки на цены!
А про каналы они пишут не про те, что делает NT1065. Они пишут про каналы приема спутников, которых на одной частоте может быть тьма. А NT1065 — это радио-каналы, про радио-каналы обычно ничего не пишут. На каждом радио-канале может висеть много каналов обработки сигнала спутников. Поэтому у них, скорее всего, там по одному NT1065 и по одной FPGA.
Jef239
Ну хорошо, что вы судите по числу каналов, а не по числу корреляторов :-) а то у кое-кого корреляторов порядка миллиона. Фраза "Piksi Multi is capable of simultaneous tracking of L1 and L2 signals from up to 22 satellites" означает, что они могут обрабатывать 22 спутника по L1 и L2, то есть до 44 каналов.
Но вот в чем беда… Теоретически в небе видна треть группировки, то есть 10-11 GPS и 8 ГЛОНАСС. Практически у низколетящих спутников слишком большие шумы для точной и высокоточной навигации. А если отсекать по углу места в 15 градусов, то остается максимум четверть группировки — 8 GPS, 6 ГЛОНАСС, 3 GALILEO (из 13 запущенных). После запуска всей группировки GALILEO будет 8+6+8=22 спутника. Все остальное — больше для понтов.
То есть кому-то хочется принимать все (включая ложный кросскорреляционный прием, низкие спутники, помехи....) и он делает сотни каналов. А уж потом — фильтрует результат на мусор и нормальные данные. А кто-то предварительно (по альманахам) настраивает каналы на прием нужного спутникового сигнала. И тогда 22 — вполне хватает.
Что касается частотных каналов, то все GPS L1 и GALILEO Е1 — это один частотный канал, 1574 Мгц. Так что 4 частотных канала — для GPS/ГЛОНАСС/GALILEO достаточно.
Что касается радиомикросхемы — это некая внутренняя информация, но сильно похоже на правду. Увы, не все можно писать в открытых местах.
Pavel9860
По числу каналов не совсем согласен
Чтобы принимать все спутники выше 15 гр над горизонтом сейчас 22 канала недостаточно
Кроме GPS (28 спутников) GAlilelo(18 ) и ГЛОНАСС(24) есть еще BeiDou(22) и геостационарные, с которых идет вещание поправок
https://en.wikipedia.org/wiki/Satellite_navigation
Итого сейчас 92 спутника + геостационарные. В принципе прием дополнительных наборов спутников (если уже, например, принимаем достаточное кол-во сигналов с GPS) не дает повышения точности, только повышение надежности позиционирования.
Сколько всего спутников может одновременно принимать чип NT1065? Если можно скриншот и лог записи (RINEX формат вполне подойдет)
Jef239
Такое впечатление, что вы забыли, что Земля круглая. Ну попробуйте, найдите спутниковую обстановку, когда выше 15 градусов видно более 22 спутников. я уж не говорю о том, что число спутников вы подсчитали неверно.
Прием дополнительных спутников даст повышение точности, но только когда речь идет о достаточно высоких спутниках. Низкие спутники — скорее ухудшат решение.
Поржал. @ itsar, пожалуйста, передайте этот анекдот в NTLAB, пожалуйста.
NТ1065 — это всего-лишь ВЧ-часть. Усилитель, гетеродин, смеситель, детектор + АЦП. Вопрос не в том, сколько он может принять (он примет все), вопрос в том, сколько спутников могут одновременно передавать на одном частотном диапазоне. Это где-то примерно 256 для CDMA и 20 для FDMA.
Скриншот записи — смотрите вверху статьи. Ещё раз. NT1065 — это не приемник, это одна из деталей, из которых строится приемник.
itsar
Уважаемый jef239, это действительно, такое «нутряное» дело. Очень много людей путается. Это обратная сторона популярности спутниковой навигации. Отраслей много и в каждой своя терминология.
А в количестве спутников есть одна загвоздка. Если крен/тангаж носителя значительны и быстро меняются, то следует, по-моему, следить за всеми спутниками в полунебе, да и еще за теми, которые в него только влетают.
Jef239
Увы, нужен именно угол места. Радиоволна от низких спутников проходит намного больший путь в атмосфере. На её пути могут быть деревья, облака (которые она проходит почти вдоль) и так далее… То есть мы получаем и нестабильный сигнал-шум и приличные задержки по пути волны. Для обычного приема это не так важно, а для RTK — серьезно. У GEOS-3 шум фазы идет в пределах 1% длины волны, у NV-08 — до 10% длины волны. А все, что с большей задержкой — решение портит.
itsar
А если это в небе происходит. Пусть это будет беспилотник, у которого углы крена и тангажа бывают очень большие. тут точно нет деревьев, только небо. Как Вы считаете, можно использовать спутники ниже 15 градусов?
Jef239
я бы у Татьяны Юрьевны спросил. Вот статья по тропосферным задержкам — они зависят от угла места. В зависимости от угла места "задержка может при этом увеличиваться до 5 раз." Видимо использовать можно лишь тогда, когда тропосферная модель будет нивелировать задержки.
Это не так важно для компаса (угломера) — мы работаем по разности сигналов от двух приемников. Но для автономного режима сантиметровой точности — оно очень важно… Судя по статье — там задержки порядка десятка метров. То есть очень большие.
itsar
Спасибо!
Запомню, очень интересно.
Korogodin
А зачем вам вытягивать загоризонтные спутники? Мы в системах контроля их тянем только ради того самого «контроля». Для решения их использовать — больше мороки и проблем. И так каналов впритык, чтобы весь зоопарк сигналов и систем тащить.
itsar
Я исходу из условий сильного крена/тангажа. В таких условиях нужен каждый спутник, включая ниже 15 градусов. Но загоризонтные все-таки не нужны.
Pavel9860
Первый попавшийся файл:
5 град Ю.Ш и 55 В.Д 2015_12_14 с 12.00.00 по 12.00.10 (за 10 секунд) был виден 21 спутник GPS + ГЛОНАСС и 4 SBAS (S23 S27 S28 S36)
15 спутников GPS + ГЛОНАСС выше 15 град гад горизонтом G01 G03 G08 G11 G16 G22 G23 G26 G27 G32 R02 R13 R14 R15 R18
Это не считая спутников Galileo, BeiDou. Количество остальных спутников кроме GPS + ГЛОНАСС явно больше 7 (выше 15 градусов над горизонтом). Т.е в сумме будет больше 22.
Количество действующих спутников взято по ссылке в ответе выше. Их сейчас 92 + геостационарные.
Подскажите где здесь ошибка? RINEX данные могу предоставить
По частотам:
у ГЛОНАСС частотное разделение каналов (FDMA) Все спутники передают в одном частотном диапазоне 1598 — 1605.4 МГц. f1 = 1602 + n?0.5625 МГц, n = ?7,?6,?5,…,0,…,5,6. Т.е. количество одновременно принимаемых на одном канале спутников зависит от ширины канала. Ширина канала — характеристика ВЧ части. Сможет NT1065 принимать сигналы одновременно из начала и конца диапазона 1598 — 1605.4 МГц, если да, то что будет с чувствительностью?
Jef239
А можно табличку с высотами и направлением движения (восход и заход)? А ещё лучше — картинку со спутниковой обстановкой. Вот там и увидим, кто для решения полезен, а кто — нет.
Количество спутников вы сильно переврали. Хотите разбор?
Берем вашу ссылку. По ссылке GPS 31 — у вас 28. А вот реальные данные на сегодня по GPS и ГЛОНАСС. Как видите, 28 в вики (и 27 в реальности) это общее число спутников ГЛОНАСС, включая резервы, летные испытания и испытания Главного Конструктора.
По ГАЛИЛЕО. На орбите их 18. Но если глянуть в ту же вики, то выясняется, что работают 11. Смотрим в оперативную сводку — там тоже 11.
Теперь смотрим Beidou по вики. Всего 20 работающих спутников из них 6 геостационарных, 6 на обычной средней орбите и 8 низких.
Что касается SBAS — то нам нужен всего один спутник для приема поправок. Ну нет смысла одно и то же принимать с 6 спутников.
ДА, сможет. С чувствительностью — ровно то же, что и у других приемников. Это стандартная схема построения приемников. Может 25 лет назад и делали по АЦП на частотный канал в военных приемниках с их немереной ценой (могу уточнить), но в массовых никто так не делает. Выделять отдельный частотный канал для каждой литеры ГЛОНАСС имеет смысл только, если для него делать отдельный ПАВ-фильтр. А ПАВ-фильтр — это очень дорого и не сильно компактно.
Сейчас ПАВ-фильтры ставят исключительно в антенны. Этим и отличается антенна GPS L1 от GPS+ГЛОНАСС L1 — в первой ПАВ-фильтр узкий, только на GPS, во второй — или один фильтр пошире (от 1570 до 1609) или два фильтра.
Pavel9860
Ок, мне надоело обрабатывать данные.
Здесь можно посмотреть на расположение спутников для любой точки. Выбрать маску 15 градусов над горизонтом. И проверить чтобы все были рабочие. Увидим что на экваторе может быть видно 46 навигационных спутников выше 15 градусов над горизонтом. Рабочих из них точно больше 22. Так что с оценкой числа спутников и необходимого числа каналов Вы сильно переврали.
Хотелось бы увидеть прием данных со всех видимых спутников ГЛОНАСС с уровнем принимаемого сигнала.
Jef239
Напоминаю данные приемника PiksiMulti:
Думаю, что вы согласитесь, что для GPS+SBAS 22 канала выше головы. Каналы у них софтверные, будет мало — добавят. Думаю, что на этом спор про Piksi закончен. Разобрались. Моя вина — не глянул, что остальные системы — всего лишь hadware ready,
dreamerxxl
на самом деле многочастотные многосистемные платы Trimble BD930, BD970, BD982 стоят 1000-1500 долларов, Novatel OEM615 600..1000$ (зависит от опций), Novatel OEM628 1500$, Comnav от 900$, Unicorecomm от 500$, Tersus 800-1500$
itsar
Только это все без софта, кроме Tersus, наверное. Цены программных опций приведите, пожалуйста. Тогда станет понятнее.
dreamerxxl
Trimble BD930/970/982 включает все сигналы, бывают в платах стоит только 20Гц, бывает сразу 50Гц, вообщем 1 плату RTK, GPS L1/L2/L5, GLO L1/L2/L3, BDS B1/B2, Galileo E1/E5, QZSS 50Hz можно взять за $1500, чем больше тем дешевле, та же цена идет за tersus 316 (правда с INS). за 600 долларов OEM615 будет GPS L1/L2 5hz, за 1000 долларов GPS,GLO L1/L2 10hz, за 1500 долларов OEM628 будет GPS L1/L2/L5, GLO L1/L2/L3, BDS B1/B2 10Гц… как-то так. Сегодня моя базовая станция c маской в 10 градусов в москве видит 11 gps, 8 glo, 6 bds, 4 galileo. Так что 200 каналов за глаза будет на трех частотах для всех систем, включая sbas, qzss, irnss, lband.
dreamerxxl
поправка, в максимальной комплектации для Novatel OEM615 (D2SROGTTO) будет 20Гц, также как 20Гц в OEM628
dreamerxxl
цены на платы падают, т.к. тот же Novatel выпустил уже 7 серию плат, 3 года назад Novatel OEM615 D2SR0G550: GPS & GLONASS tracking at 5Hz мне обходилась в 1200$, сейчас меньше 1к$
itsar
Не подумайте, что я поспорить хочу. Мой интерес состоит в покупке приемника для проверки своих антенн. Я очень страдаю от отсутствия возможности проверить, но не хочу дорогую вещь покупать. Я считал, что цены другие. Вчера специально переспросил у коллег, которые покупали. Конфигурация:
ГНСС плата NovAtel ОЕМ638
(ГЛОНАСС,GPS, L1/L2/L5, SBAS/L-Band/QZSS, RTK-Base/DGPS, поддержка сервиса дифф. коррекций TerraStar, GL1DE/RAIM, выдача сырых данных и решений 20Гц, NTRIP)
Цена — более 9000 уе.
Что из этого надо выкинуть, чтобы опуститься хотя бы до 1500?
Или не париться, а просто написать запрос на цену продавцу?
Большое спасибо за информацию!
dreamerxxl
я писал про 615 и 628, новые платы значительно дороже и если брать у российских оф. дилеров, то тем более дороже, они у меня только за опции с 5 до 20гц просили $1400 как-то, хотя разница там где я сейчас беру разница всего $50.
dreamerxxl
у нас в РФ можно купить, например, такой ГНСС приемник как Stonex s8 на OEM628, он стоит 199тр, то есть чуть дороже 3к по текущему курсу, с НДС и маржой российского поставщика. Можно просто из него достать плату, если хочется дешевле, сами приемники делают в Китае, я бы начал поиск оттуда.
itsar
3к — не хочу. Мне быстрый темп точно не нужен. Вы писали:
.Меня нижняя граница интересует. Это какие системы будут?
dreamerxxl
только GPS L1/L2 5hz, но надо понимать, что мы сотню плат ежегодно берем, чтобы такие цены иметь.
itsar
Это хорошее уточнение. Мне надо одного зверя. Запрошу продавца. Спасибо!
Korogodin
У Trimble есть фатальный недостаток — они не являются модным стартапом и не уважают смузи =)
Все перечисленные платы лучше Piksi в техническом плане. Но Swift предлагает простое решение, понятное всем, кто хочет побаловаться RTK, а не только матерым геодезистам.
Это как разница между старт-китом Atmega и Arduino: простота покупки, простота начала работы, человеческая поддержка и т.п.
Korogodin
Думаю, что все геодезические монстры с легкостью опустят ценник и до $200 за плату. При одном условии — если вы дадите им большой рынок. Конторы типа Swift'а не имеют каких-либо технологических преимуществ по сравнению с тем же Trimble. Вот только Trimble разработки приходится отбивать продажами, а Swift живет на деньги инвесторов. Легко прикинуть, исходя из себестоимости модулей и количества человек в команде, что они в глубочайшим минусе по прибыли. Те $15 млн, что им дали инвесторы, они должны проесть года за два-три, по моим оценкам
dreamerxxl
зачем Trimble отпускать цену? Он лидер. Даже если кто-то будет продавать по 200, Trimble будут брать по 1000, т.к. Trimble я получаю fixed решения за 100 км от базовой станции, а Novatel или Javad нет.
itsar
А для летающей и дорожной техники нужно точнее.
AlexHa
Необходимая точность во многих применениях ограничена изменением внешних условий, не связанных со спутниковыми каналами. Какие ни будь сползания грунта могут дать смещения больше, чем ионосферные погрешности. Какой смысл мерить местоположение до сантиметров, если требующаяся для безопасного движения траектория съехала на метр?
itsar
Это правильно, но сначала будут находить приложения, где эти внешние условия будут мало влиять. А потом доберутся и до таких задач.
Если быстро съехала на метр — это катастрофа. В обычных случаях такие вещи происходят медленно и будут отслеживаться другими системами.
Роботам без точного позиционирования не выжить никак)
AlexHa
Приложений, где такие внешние условия влияют слабо, не слишком много. Смещение грунта, это только один из вариантов. На складе это может быть упавший с погрузчика ящик или сам сломавшийся погрузчик, оказавшиеся на траектории. На дороге — провал подмытого водой асфальта, другое транспортное средство, пешеход. На стройке — упавшие стройматериалы, сломавшаяся строительная техника, сами строители. В сельском хозяйстве — упавшие деревья, промоины. В авиации — птицы. И т.д. — во всех случаях придётся адаптивно менять траекторию. А если система адаптируется, зачем ей точное позиционирование? Точное позиционирование, это скорее для каких-то роботов, работающих в максимально изолированных от внешних воздействий условиях, вроде промышленных роботизированных линий или закрытых складов.
itsar
Да, реальность очень сложна, черт побери.
Я согласен с Вами в том смысле, что маркетологам нужно будет хорошо поработать, чтобы продать высокую точность массам. Это большая отдельная тема. Мне же интересна техника и направления ее развития. О чем и пою)
AlexHa
В плане техники меня заинтересовал высокоскоростной ввод по USB с использованием стандартной библиотеки, без специализированных драйверов. Такое можно сделать? Или я что-то не понял?
itsar
Вполне работает на стандартных драйверах и с библиотекой Cypress, и с libusb, если нет полной загрузки процессора. Одни коллеги писали на моей плате 8 часов и все было без единого пропуска. И это при условии, что один NT1065 выдает максимум 100 МБайт/с.
Есть ребята, которые используют мою совсем другую плату (АЦП для КВ приемника), где скорость потока около 250 МБайт/с. Так вот, у них при всплесках нагрузки появляются пропуски. При стабильной средней нагрузке пропусков нет. Это и на Винде, и на Линуксе. Сейчас они отдыхают, чтобы с понедельника полезть в драйвер Линукса.
Я знаю народ, который принимает из USB3 360 МБайт/с, закрывает глаза на возможные пропуски и их система работает, так как пропуски случаются редко и не влияют на систему.
Может ребята из НТЛаба что-то смогут здесь добавить. У них тоже есть плата с USB3.
AlexHa
Т.е. для того, чтобы написать полноскоростное приложение под USB3, уже не нужно специальных библиотек, поставляемых с железом? В USB2 вроде бы так не получалось.
itsar
Если библиотеку Cypress считать специальной библиотекой, то не нужно. Потому что есть libusb, который работает почти так же. Но библиотека Cypress сейчас доступна в исходниках, так что у меня назвать ее специальной язык не поворачивается.
Посмотрите исходники для платы на GitHub. Там все понятно.
Jef239
Знаете, если картошку сажать в грядки, а не равномерно, то урожай будет на треть больше. :-) Но для этого нужна точность 3 сантиметра СКО (максимальная ошибка плюс-минус 10 см).
Для оценки движения стенок шлюза — нужна точность лучше 5 миллиметров СКО, само движение стенок в норме — пара сантиметров на цикл наполнения и опорожнения шлюза.
На стройке… ну скажем отклонение Лахта-центра от вертикали контролируется методами GNSS с тем же 5 миллиметров СКО.
И так далее… Мир не заканчивается системами автовождения, они лишь очень маленькая часть…
AlexHa
Вопрос, насколько это все действительно необходимо. Сажали и картошку, и удобрения вносили с нужной точностью ещё до появления спутниковых систем. Например, английская фирма RDS выпускала сельскохозяйственные системы аналогичного назначения ещё до появления дешёвой спутниковой навигации, в начале 90-х. И шлюзы делали, и небоскрёбы строили. Приложений, где высокая точность может быть обеспечена исключительно спутниковыми системами, не слишком много. Вопрос в цене. Если какими-то другими средствами обеспечивать точность дороже, будут применяться спутниковые системы. Ваши примеры все стационарные, спутниковую навигацию в них легко заменить местными системами позиционирования, лазерными, с использованием радиомаяков и т.п. Главное преимущество спутниковой навигации это её глобальность, и проявляется оно, в основном, при установке системы на движущихся объектах.
itsar
Вот-вот, а в результате этой революции снизится стоимость высокоточного спутникового позиционирования, что приведет к вытеснению систем другого типа из некоторых рынков и появлению совершенно новых.
Jef239
Главные преимущества GNSS:
Глобальность есть только на море и в небе. А в городком каньоне — многолучевость. Небо почти закрыто и куча отраженных сигналов от зданий. И это ставит крест на высокоточной навигации.
Если хотите пример высокоточной системы на движущихся объектах — это морской спутниковый компас. Гирокомпас — стоит 10 миллионов, магнитный — от миллиона, спутниковый — полмиллиона. Цена магнитного определяется тем, что судно железное и его собственные магнитные поля сильно мешают.
AlexHa
Гирокомпасы для наземной техники разрабатывают в конторе, в которой я работаю, так что я имею какое-то представление и о ценах, и о точностях. Не вся техника быстро дешевеет, скажем, сотовые телефоны подешевели быстро, а вот спутниковые, появившиеся раньше сотовых, до сих пор достаточно дороги. Намного ли подешевеет спутниковая навигация с сантиметровой точностью, не очевидно.
Jef239
Ну до выпуска устройств в продажу не хочется объявлять цены. Но если говорить о компасах — то их лучше всего делать на приемниках GEOS-3MR. Цену можете сами посмотреть.
Ну и как везде: чем больше тираж — тем меньше цена. Использование PPP в навигаторах — думаю, что будет. Субметровая точность в тех же автомобильных навигаторах — тоже не вижу ничего невероятного. Сантиметров на улицах не добиться (многолучевость!), но вот полосу дороги уже можно будет определять напрямую…
AlexHa
Чтобы определять полосу напрямую с сантиметровой точностью, её и рисовать нужно напрямую с сантиметровой точностью. А это не везде возможно. Достаточно участка в 100 метров, на котором разметка съехала, на 1000 км дороги, чтобы «прямой» навигатор у дальнобойщика каждый день генерировал заезд на встречную.
Jef239
Навигация — это вовсе не автовождение.
Ну вот вам история. Садимся в машину, девушка включает навигатор. Он командует «развернитесь», девушка сдуру начинает искать разворот. А причина — навигатор на стоянке не понял, на какой мы стороне улицы. Точности не хватило.
Ну и много бестолковых команд «перестройтесь в левый ряд». Зачем? Мы и так в левом ряду едем.
Так что участок в 100 метров — ну да, какие-то сбои даст. Но это будет 0.1% от нынешних сбоев. В целом субметровая точность (30-50 см СКО) автонавигатору полезна. Так что это будет массовый продукт.
itsar
Про навигатор и девушку — это правда, гремучая смесь! Я тоже много такого могу рассказать. Вот кому нужно точное позиционирование точно.
Если будет массовая точность, то будут и карты. Не будет так, что точность останется без карт.
Jef239
У гуглокарт уже субметровая точность. мы на них RTK накладывали. Там где-то полметра точности (плюс-минус).
AlexHa
Для того, чтобы определить, в какой стороне находится нужный магазин, и т.п. задач, точность излишняя.
Jef239
А для того, чтобы понимать, на какой полосе находишься — вполне правильная
AlexHa
Для того, чтобы понимать, на какой полосе находишься, навигация вообще непригодна, разметка не всегда находится на одном месте. Сегодня здесь полосу провели, завтра там. А бывает ещё и временная разметка, ремонт дорог и т.д. и т.п. Для трамваев, возможно, подойдёт.
Jef239
Вы ещё скажите, что дорожные знаки не нужны, ибо не показывают наличие сугробов и припаркованных не по правилам автомобилей. :-)
Достаточно того, что в 95% случаев полоса будет определена верно. Переменная разметка — это проблема лишь трехполосных шоссе с обгонной полосой.
В целом — вы неправильно понимаете задачи. То есть какой уровень системы за что отвечает. Такое впечатление, что вы никогда не водили машину с навигатором. Ну или вообще никогда не водили.
P.S. Вы зонтом тоже не пользуетесь лишь потому, что раз в 3 года его может унести ветер?
AlexHa
Если в 5% случаев вас будут штрафовать или вам придётся делать круги в 20 км из-за того, что вы не перестроились в нужный ряд, вас это вряд ли устроит. А если вы перепроверяете все рекомендации навигатора, то какая разница, сколько процентов он подскажет неправильно — 5 или 55?
Jef239
Поездите на машине — увидите, какая разница. Особенно рекомендую в чудом городе поездить.
А круги — да, приходилось делать (в чужом городе), когда навигатор вовремя не предупредил о смене полосы. Потому как без него — просто вовремя не догадаться, из каких полос куда поворот разрешен.
Но вариант «взять такси и перегрузить туда 30 килограмм вещей» устраивал ещё меньше. Так что да, делали кольца в районе Тимирязевской.
AlexHa
Думаю, роботизация авто вас спасёт :) Роботизированные такси уже запущены в Сингапуре, США, скоро обещают в Англии, Швеции, Австралии.
Jef239
Настоятельно прошу пруфы на ваши сказки.
Полностью автономные роботизированные такси компания собирается представить к 2018 году.
В настоящее время каждое авто требует присутствия человека: в такси обязательно находится инженер NuTonomy, который следит за работой автоматики и безопасностью, а также может в случае необходимости взять на себя управление.
А вот и США:
Сообщается, что во всех таких машинах будут находиться инженеры Uber, которые отследят работу системы автопилота и смогут в случае необходимости взять на себя управление автомобилем.
AlexHa
Ну вот вам несколько
https://geektimes.ru/post/283714/
http://kommersant.ru/doc/3131164
http://kommersant.ru/doc/3071985
http://kommersant.ru/doc/3070975
http://kommersant.ru/doc/3046877
http://tass.ru/ekonomika/3760176
Jef239
По первой же вашей ссылке
Кто сидит на водительском кресле? В машине находится опытный оператор для соблюдения закона о передвижении беспилотных автомобилей и для обеспечения комфортной поездки.
Остальное и смотреть не стал. Не путайте заявления маркетологов с реальностью. Вот когда машина поедет вообще без человека. И не 100 метров с парковки, а часа два — вот тогда и заявляйте о беспилотном вождении. Только навигация там все равно на GPS будет.
AlexHa
О 100 метрах с парковки речь давно не идёт, во 2 ссылке, к примеру, речь идёт о коммерческих перевозках пива на расстоянии 200 км. И там везде, разумеется, используется GPS. Но не с сантиметровой точностью. Компания Ford потратила 1 миллиард долларов на покупку разработчика систем для беспилотников. Это большая сумма даже для Ford, если они её не «отобьют» на продажах беспилотников, компания здорово просядет, а то и вообще разорится. Значит, в ближайшие годы следует ожидать вывод на рынок большого количества авто с беспилотными системами, по крайней мере, от Ford.
Jef239
Ну про термояд уже лет 50 говорят. И денег — намного больше миллиарда вложили. В течение ближайших лет — раз 10 обещали. А термояда как не было — так и нет.
AlexHa
В термояд коммерсанты не вкладываются.
Jef239
Как минимум уже 20 лет вкладываются. Только вас забыли уведомить:
Это будет первый частный термоядерный реактор в США. На его разработку выделили 500 миллионов долларов.
AlexHa
Где же 20 лет, новость от января 2017, и начало работы обещают только к 2027. Беспилотники обещают раньше.
Jef239
По ссылка прочесть трудно? С 1998 года прошло почти 20 лет. И с тех пор и собирают инвестиции.
Tri Alpha Energy, Inc. (TAE) is an American company based in Foothill Ranch, California, created for the development of aneutronic fusion power. The company was founded in 1998, and is backed by private capital.
AlexHa
Возможно, что и так. Если, конечно, навигация сохранится после массового внедрения систем автовождения, начало которого прогнозируют уже через пару лет.
itsar
Да, тогда наступит страшное время. Девушки простят нам любые баги и поймут) А у роботов чувство сострадания отсутствует. Надо успеть пожить пока.
Jef239
Расскажите, пожалуйста, как вы доедете от Заячьего переулка до Косой линии на автопилоте без навигации? Кто будет определять, по каким улицам ехать?
AlexHa
Улицы, по которым ездят, уже 3 метров не бывают. С такой точностью и требуется определять местоположение. Остальное — адаптивно, по данным от датчиков.
Jef239
Нет, нужно определять минимум сторону улицы. Ещё лучше — полосу. Зачем — я уже описывал. Минимальная ширина полосы — 2.75 метра.. С учетом правила трех сигм получаем нужное СКО навигатора 46 сантиметров.
AlexHa
Полосу и сторону улицы намного проще и дешевле определять вспомогательными устройствами, считывающими разметку, с использованием видеокамер, например. Сейчас полно таких систем и стоят они копейки. Если же речь об усовершенствовании конкретно спутниковых навигаторов, то здесь конечно, чем точнее, тем лучше — но все упирается в стоимость. Если спросить пользователей «вы согласны приплатить пару сотен долларов за то, чтобы ваш навигатор не путал полосы?» то для подавляющего большинства ответ очевиден.
Jef239
Речь идет о лишних 500 рублей за навигатор и 50 рублей ежемесячной платы за трафик. Это вот — через 10 лет.
Помните, были одночастотные мобильники? Одни на 900 мегагерц, другие — на 1800. У меня вот 15 лет назад был мобильник на 1800. И я искал оператора с базовыми станциями на 1800 Мгц.
Ну и где теперь одночастотные мобильники? Хоть один найдите? Ровно то же самое будет с одночастотным GNSS. Вымрет как класс. Как почти вымерли GPS-приемники — теперь почти всё принимают и GPS и ГЛОНАСС.
AlexHa
Контроль перестройки из полосы в полосу делается с помощью видеокамеры и простейшей инерциалки на микромеханике. С коррекцией и проверкой в контрольных точках с известными сигналами с видео, например, на перекрёстках со светофорами или по знакам. Если через 10 лет будет лишних 500 рублей и 50 рублей абонентской платы (что в сумме за год больше 1000, сопоставимо с ценой простейшего навигатора, а за 5 лет 3000), то возможно будет какое-то распространение, почему нет? Но спутниковый телефон, повторюсь, подешевел не настолько, насколько мобильный. Как знать, не ждёт ли эту технологию судьба спутникового телефона.
Jef239
Посмотрите пожалуйста точность «простейших инерциалок». Та, которая дает 15 минут с метровой точностью стоит порядка 4 тысяч долларов.
Плюс хитрые задачи отстройки от неравномерности вращения земли и неравномерности силы тяжести…
А с контролем полосы по светофорам и знакам — ещё смешнее, чем с GPS. GPS-навигаторы базируется на спутниковых снимках, и они могут обновляться раз в 12 часов (а иногда и чаще, Нью-Йорк на гуглокарте обновляется раз в 5 минут с геостационара). Но светофоров и знаков там не видно. Видно полосы — по идущим машинам. Но увы, не светофоры. И лучше не сделать, там атмосфера мешает.
Так что никуда вы от GPS-навигации не денетесь.
AlexHa
Простейшая инерциалка у вас в смартфоне. Чтобы проконтролировать перестройку из полосы в полосу, такой точности достаточно. При чем здесь светофоры со спутника, не понял. Светофоры имеются в виду с камеры в авто.
Jef239
Понятно, с БИНС вы не работали. Как вы отличите ускорение при нажатии на газ от перехода в соседнюю полосу? Мобильник вы же можете как угодно положить. Если вы жестко фиксируете мобильник, то что мешает так же жестко зафиксировать антенну GPS посредине машины?
И даже при фиксированной машине — будет и приличный дрейф осей и кросскорреляция. То есть нажатие на тормоз воспримется как ускорение по всем осям, а не только по продольной.
Так что увы, подстраивать оси вам придется раз в минуту.
Что касается определения полосы при помощи положения светофоров. то вопрос в том, что будет с вашей системой, если светофор перевесят.? И откуда она возьмёт верное положение светофора? Светофоры — они не только на краях дороги, они ещё и над полосами висят иногда. Или на лапе над первой полосой.
AlexHa
Да хоть раз в секунду, коррекция по изображению с камеры, а камера показывает разметку. Светофоры вешают в местах с определённой разметкой, на перекрёстках, например, определить, какое именно это место, можно не только по GPS, но даже и по сотовым вышкам, с точностью метров до 100. Светофоры редко вешают чаще. Да, и мобильник прикручивать к системе я не предлагал, если что. Там внутри у некоторых есть такая штучка, микромеханический гороскоп, на них низкоточные системы навигации и делают. Они отдельно продаются.
Jef239
Ваш уровень, увы, понятен. :-(
На гироскопе вы переход с полосы на полосу не отследите. Для него что поворот, что перестроение — все примерно едино. Нужен акселерометр.
Хорошо, что вы поняли, что с задачей калибровки осей вы не справитесь. Акслерометры надо выставлять фиксированно, один по продольной оси машины, другой по поперечной. Ну и гироскоп ло кучи. Полной отстройки у вас не будет, то есть в поперечном канале будут сигналы и при разгоне и при торможении. И выделить именно поперечный канал — это сложная задача.
Поскольку у БИНС есть дрейф нуля и дрейф осей — вам все равно потребуется GPS для периодической перекалибровки. Для БИНС ценой в 4 тысячи долларов нужна перекалибровка раз в 15 минут. Для совсем дешевых — раз в 1-2 секунды,
Поскольку БИНС разместить в произвольном месте не удастся, то непонятно, откуда у вас фантазии о размещении антенны GPS В произвольном месте? Так что её можно ставить по центру машины.
Базовые станции сотовой сети — иногда передвигают. Или репитеры ставят. и пока это изменение дойдет до вашей сисиемы — сотни машин с курса собьются.
То, что вы не понимаете разницы между задачами это уже само собой. У нас есть разные задачи:
Так вот, удержание, разумеется проще сделать камерами, чем GPS. А вот остальные задачи…
Не видно с водительского места на садовом кольце разметку всех полос. Дай бог разметку соседней полосы увидеть. И камера на крыше не поможет, если рядом фура стоит. Это вам камеры надо метров на 10 поднимать, но увы — на этой высоте провода висят.
И по светофорам вы там не определитесь, их там много висит над разными полосами и они похожие.
AlexHa
Задачи связанные, если задача удержания в полосе решается, то и задачу определения полосы можно решить, с использованием предыстории. И потом, я же не отрицаю GPS совсем, а утверждаю, что сантиметровая точность избыточна для определения полосы. Метровой точности с усреднением вполне достаточно, плюс коррекция по внешним ориентирам, где это возможно. Комплексирование всех имеющихся данных позволит решить все три задачи с требующейся точностью и нужной надёжностью без лишних затрат. Микромеханическим гироскопом часто называют трехосевой микромеханический акселерометр, его я и имел в виду. Вы напрасно считаете тех, кто вам возражает, необразованными дураками, это вредит работе.
Jef239
Ну батенька, ну не путайте вы субметровую точность с сантиметровой, а гироскоп с акселерометром. Ну ламерство это. Единственное, что позволяется — вместо GNSS писать GPS.
Задача определения полосы, увы не решается предисторией. Полосы могут приходить и уходить и справа и слева. Иногда это происходит одновременно и вне светофоров. Например на питерской кольцевой. И ориентиров там нету…
itsar
Я смотрю сейчас из окна на дорогу, снег идет. Разметки не видно вообще. Видео может работать круглый год только в местах с хорошим климатом.
AlexHa
Да, шведы в дорожное полотно собираются магнитные метки заделывать. Есть также предложения добавлять в краску разметки магнитные материалы. И кроме камер есть ещё радары, они тоже недороги, с их помощью разметку конечно, не считать, но можно определять профиль дороги и положение на ней. Форд в прошлом году демонстрировал передвижение на основе камер по полностью покрытой снегом дороге, за счет опоры на изображение придорожной инфраструктуры — столбов, отбойников, знаков.
Jef239
Радаром? Номер полосы от края? Батенька, ну вы совсем загнули.
AlexHa
А я разве писал, что радаром можно определить номер полосы от края? Зачем вы все время за меня додумываете? Мне ваши мысли не нужны :) Радаром можно определить безопасную траекторию, если ориентироваться на серийные радары, выпускающиеся миллионный тиражами. У них достаточно скромные характеристики, и невысокая цена. Ваша ошибка, вы все время пытаетесь решить задачу одним каким-то методом, не предполагая совместного использования информации от разных систем. Предполагаете наличие какого-то супер-средства, которое решит все проблемы. И по-вашему, такое средство это спутниковое определение координат с сантиметровой точностью, которое позволит сделать и навигацию, и удержание в полосе, и все прочее. Не думаю, что это возможно, из-за меняющихся внешних условий и дороговизны.
Jef239
Мы с вами про что говорим? Про определение номера полосы от края (или от центра) дороги.
Всё остальное вроде удержания в полосе — это ваши фантазии. Ровно так же как сантиметровая точность в городском каньоне. Речь шла о субметровой точности, то есть примерно полметра СКО. Разница в 50 раз — это вот разница между городской улицей и чистым полем.
Задача GNSS — это навигация. Включая определение номера полосы. Все остальное — делается иными средствами.
Комплексирование без повышение цены в разы — возможно лишь на диапазоне в несколько секунд.
Для простейщей задачи (определение железнодорожного пути при проезде туннеля) нам пришлось использовать БИНС ценой в 4 тысячи долларов. Все остальное — не дает нужной точности. на протяжении 15 минут.
При этом поезд на рельсах удерживается сам, конструкцией своих колес. И все равно, даже дорогая инерциалка — 15 минут максимум.
Так что давайте не спорить о вкусе устриц с теми, кто их ел… Дешевых и точных инерциалок — в ближайшие 20 лет не будет. Сам процесс интегрирования такой, чуть мелкая ошибка — и всё, показания поехали.
Но на интервале в пару секунд — использовать инерциалку стоит. Как часть сглаживающего фильтра для GNSS дешевые инерциалки подходят. Думаю, что через год мы такое решение покажем.
AlexHa
Насчёт железнодорожного пути я тоже в курсе, не далее как полгода назад ездили в Москву к железнодорожникам, предлагали им нашу БИНС, но она их не устроила по причине цены, которая заметно больше 4000 долларов. Не о таких БИНС речь. Давайте подитожим нашу беседу, я уже узнал о себе много нового и интересного, мне пока достаточно :) Итак, вы утверждаете, что для определения номера полосы необходима субметровая точность, которая не достижима обычным, массовым и дешёвым GPS. Я сослался на системы автоматического вождения, которые очевидно как-то определяют номер полосы, иначе, они нарушали бы ПДД, и при этом так же очевидно, не используют GPS с субметровой точностью, хотя бы потому, что ни на каких гуглкартах разметку не видно, и неизвестно, откуда бы они могли взять карты городской разметки. Вы заявили, что таких систем нет и долго ещё не будет. Ссылки на описания коммерческого использование подобных систем вы смотреть не захотели. Мои версии, как бы это могло быть реализовано, отвергли. Ну что же, не вижу смысла навязывать вам свое видение вопроса. Было интересно пообщаться. Желаю удачи в революционных начинаниях :)
Jef239
Да, логика интересная. Вы считаете, что если чего-то нету бесплатно — то его не бывает и в платных продуктах. Неужели вам это кажется разумным? На самом деле есть зачатки полос и на гуглокартах (пунктир вдоль парк-авню), просто не везде такая детализация
Мой вам совет — поездите с навигатором. И вы вполне услышите советы занять ту или иную полосу. Причем эти советы не идут на однополосных дорогах. И на многополосных — не всегда, а только когда автоматически полоса не определилась.
Нынешний подход по определению полосы — это усреднение данных за минуты + куча эвристик. Да, сейчас у массовых навигаторов СКО 4 метра и определение полосы работает ненадежно. Но примерно в 30-50% случаев работает. Как пример — определение полос в навигаторе ПроГород.
В автовождении используются субметровая (или даже сантиметровая) точность. Просто приемники там сильно дороже. Как пример — промышленная система автовождения тракторов Ag Leader — точность вплоть до сантиметровой. Поскольку трактора ездят не по дорогам (и при этом ПДД не подчиняются), системы автовождения для них — это вполне зрелая коммерческая технология.
Революция не в том, что появилась субметровая точность. Она в том, что скоро субметровая точность станет дешевой. При цене системы автовождения в сто тысяч долларов пара тысяч за двухчастотник не важна. При цене навигатора меньше 100 долларов — уже существенна.
AlexHa
Да, и правило трёх сигм здесь не при чем. Если вы едете рядом с разделительной полосой, даже при погрешности 10 см навигатор вполне может определить, что полоса не та. Все зависит от расположения антенны. Плюс дорожники полосы таки рисуют в разных местах раз от раза 10-20 см отклонение, это нормальная величина.
Jef239
Ну ОК, доказывайте, что правило трех сигм почему-то перестало работать. Только с фактами
Для определения положения навигатора в машине статистики 5 минут хватит. Сбой сразу после переноса навигатора с левого на правый край кабины возможен. Но это временный сбой.
По секрету. Навигаторы уже сейчас, при точности 3 метра КВО-50, определяют полосу. Только далеко не всегда верно, ошибка примерно в 50 процентах. Но рекомендация сменить полосу дается далеко не всегда. А лишь когда навигатор считает, что вы едете не по той полосе.
Это вот эвристики + статистика. И с увеличением точности -они будут лишь лучше работать Меньше будет ложных рекомендаций сменить полосу.
AlexHa
Никто не говорил, что правило трёх сим перестало работать. Только вы сделали расчет для случая, когда авто находится точно посередине полосы. А оно может ехать одним колесом почти по разделительной. И таки да, помимо точной навигации необходима точная и актуальная карта разметки. Иначе, неизбежно какое-то несоответствие.
Jef239
Ну колесо на разделительной. И что из этого?
Простой случай — антенна GPS посредине машин машины. ширина машины 2 метра ширина полосы 2.75 метра. До центра своей полосы будет 2.75/2 -2/2 = 37.5 см. До центра соседней полосы будет 2.75/2 + 2/2 = 2.37 метра.
Координат полосы мы получаем от пробочного сервиса. Грубо говоря, машины шлют свои координаты на сервер, он вычисляет загруженность дороги и наличие пробок. Ничего не мешает этому же серверу определять и средние координаты по полосе.
Если у нас антенна на краю машины — то это тоже выясняется осреднением. Ну не будете вы долго ехать не в потоке. А в потоке — уже видно, что для конкретной машины с среднем есть смещение. Определяем положение антенны относительно оси машины и учитываем его дальше.
Проблемы будут лишь в первые минут после перестановки антенны с левого крыла на правое.
AlexHa
Если колесо почти на разделительной, чтобы зафиксировать с помощью спутниковой навигации, есть нарушение ПДД, или нет, нужна точность менее 10 см, и кроме того, карта разметки с такой же точностью. С помощью видеокамеры это осуществляется проще. А приблизительное нахождение в той или иной полосе можно определить и осреднением координат с метровой или даже трехметровой точностью, почему бы нет?
ToSHiC
А стоимость? Я знаю, кому может быть прям интересно.
Jef239
Думаю, что в конечном итоге (лет через 20) будет на 500 рублей дороже обычного одночастотного навигатора.
itsar
Это Вы про определение полосы о стоимости спрашиваете?
ToSHiC
Да, сколько может стоить такое решение в виде железки, которая закидывается куда нибудь в автомобиль и засылает координаты в телефон по bluetooth.
itsar
Просто закинуть не получится. Нужно небко хорошее, чистое. RTL, все-таки. Соответственно, на крышу надо ставить. Корпус нужен. В малом (десятки) количестве дешевле чем за 20 т.р. не сделать. А в большом (тысячи) можно сильно дешевле. В 100 баксов легко можно уложиться. Но это не автономная система. Нужна опора на сеть базовых станций.
Korogodin
Если говорить о GNSS, то такого решения для городских условий сейчас не существует. На него есть куча желающих, все облизываются… но не выходит каменный цветок.
Jef239
Двухчастотник + эфемериды в SP3 + GALILEO. Просто дорого пока что…
Korogodin
Кажется, это самое интересное утверждение в этом топике! Есть ли реальный опыт или статьи? Какой можно достичь % fixed решения при поездках по Москве в такой конфигурации?
Моё мнение, что при нынешней структуре сигналов стабильных фазовых измерений достичь не получится из-за многолучевости.
Вот, например, картинка кодового решения Геоса в городских условиях, если отключить всю магию по отбраковке и сглаживанию измерений:
Я боюсь представить, что там с фазовыми измерениями. Неужто реально тащить фазу без разрывов в таких условиях?
Jef239
А зачем для определения полосы нужен fixed? Вполне хватит float. собственно он и имелся ввиду.
У GEOS слипов очень много. В том числе — полно и полуцикловых слипов. Но фаза у него зато чистая, шум порядка 1%.
По Питеру NV08 в режиме компаса (3 антенны на крыше) дает порядка 55% fixed. GEOS — думаю где-то 75% (больших трасс не делали). Вся фишка в том, что на GEOS быстрее восстанавливается решение.
Самое неприятное — это узкая улица с девятиэтажками. Если в створе спутников мало — пока с этого каньона не уйдем, фиксации не будет.
Korogodin
Разве float не имеет права оказаться на соседней полосе?
Спасибо, это очень ценная информация! Я докторскую пишу на тему решения проблемы многолучевости в корне на системном уровне, и надежный RTK в городе в этом случае — одно из основных преимуществ.
Все признаки того, что они перетянули полосу и не успевают её расширить при появлении динамики. Шумы маленькие, но саму фазу там должно систематически валять.
Jef239
float может дать субметровое СКО. И это проще fixed.
Если Татьяна Юрьевна разрешит — могу дать данные проездов. Но это проще в личке обсуждать. В свою очередь — нам интересны любые решения по поводу многолучевости.
Да, это даже мне понятно, что у GEOS кольцо слежения слишком затянуто. Точнее на динамике — успевают, а на многолучевости — нет. Если бы они обнаруживали все слипы — было бы нормально.
Korogodin
Если говорить про моё упоминание системного решения вопроса многолучевости, то оно именно системное, связано со структурой сигналов.
Jef239
Изменение структуры GPS-кода ради решения многолучевости?
Korogodin
Скорее ГЛОНАССа. НИРов в пользу GPS'а мы как-то не делаем.
Jef239
Ну это само собой. Просто термин GNSS многим менее понятен, чем GPS.
itsar
Уважаемый Korogodin, а как Вы смотрите на борьбу с многолучевостью в городе с помощью антенный решеток?
Korogodin
Смотрю с надеждой) Nomada в многоантенной системе имеет два варианта использования, на мой взгляд: 1. Делать угломер или пеленгатор. 2. Пытаться вырезать многолучевость.
itsar
Уважаемый Korogodin, у меня тогда предложение. Я запишу выборку с решетки через NT1065 в разных условиях, с открытым небом и из условного колодца, Вы обработаете ее в плане борьбы с многолучевостью, сможете использовать результаты в Вашей научной работе и расскажите что-нибудь нам. Всем будет интересно. Идет?

Вот такая штука. Пока в стремной коробке, но если положить ее в пакет, то можно прилепить даже на крышу авто и сделать запись в движении даже в мокрую погоду.
Korogodin
У нас пока есть только идея. Но даже на уровне идеи понятно, что выборкой с АЦП не обойдешься — сигналы слишком слабые. Нужна серьезная сигнальная обработка в связке ПЛИС+ARM, в Матлабе за вменяемое время такое не затащишь.
Оборудование для проверки идеи есть. И антенны, и фронтенды, и цифровая часть. Но там всё не просто, раньше сентября результатов не будет.
Korogodin
Этот вопрос меня долго мучал. Дело в том, что наша команда в России делает
ровно то же, что и команда Swift'а в штатах в техническом плане. Тот же Zynq,
те же фазовые измерения. Вот только потребитель у нас совершенно другой.
Когда несколько лет назад начали появляться новости о Swift, мы только
смеялись. Приемник на FPGA для беспилотников? Что правда?! Потребеление в 3 Вт,
цена порядка $1000. Кому такое решение нужно!? Есть ведь u-blox, есть Геос и
NV-08C.
Жизнь показала, что нужно! Нужно именно законченное решение, которое работает
из коробки. В итоге наш поезд ушел, а Свифты в топе.
За это время они переориентировались на другую нишу — automotive. В этой нише
их недостатки нивелировались, а плюсы выросли. И сила их не в технике (судя по
исходникам, работать в реальных условиях оно будет кое как), а в том, что это
полноценная компания, предлагающая законченное решение и готовая развиваться
дальше!
Вы скажете, что $600 — слишком много для automotive. Но у этих ребят уже $15млн
инвестиций. Когда дойдут до следующего уровня развития и расширят рынок, то
выпустят ASIC, Опустят стоимость до $100.
itsar
Большое спасибо! Вы четко уловили мою боль! Вот работаешь, работаешь, и вроде все мысли правильные, а ничего на выходе похожего на Свифт не выходит. Я предлагаю не отчаиваться. Шансы есть. (Это я себе, в основном))
Революция, все таки!
Jef239
Ну я не такой великий специалист, как вы — всего лишь программист RTK-систем. Тем не менее, хочется немного вас подправить:
Теперь объясняю суть революции. У нас есть много разных ошибок, которые мешают достигнуть сантиметровой точности. В первую очередь это ошибка бортовых эфемерид. Она устраняется при помощи PPP (в русском варианте СВО ЭВИ), то есть передачи высокоточных эфемерид (и ошибок часов спутников) через инет в формате SP3. В том числе и прогноза эфемерид до 48 часов. Уже на базе этого в экспериментальном режиме было достигнуто фиксированное решение RTK (сантиметровая точность в динамике) на одном приемнике в одночастотном режиме.
Следующая проблема — это ионосфера. Она неоднородна, для её коррекции действительно нужна густая сеть базовых станций. Но эта проблема решается двухчастотным приемником. А самое главное — дешевым двухчастотным приемником.
Все остальное — или зависит от самого приемника или достаточно однородно, чтобы иметь небольшую сеть коррекции.
Если интересно — то думаю, что через полгода мы вам покажем RTK на одном приемнике производства НИИ КП
ToSHiC
А что можете посоветовать в качестве антенны? Нужно получать положение автомобиля, с хорошей точностью. В идеале — 2 антенны, на крае капота и на багажнике, чтобы ещё и положение в пространстве знать. Естественно, хочется недорого :) Но хотя бы чтобы антенна была достаточно плоской. При этом капот хорошо работает в роли большого экрана, а машина будет не в городе.
Кстати, на счёт RTK и одночастотников — тайваньцы выпустили модуль, в котором приёмник и ARM кристалл для вычислений, $50 за 1Hz версию, $100 за 10Hz: http://navspark.mybigcommerce.com/ns-hp-rtk-capable-gps-gnss-receiver/
Jef239
Если для RTK L1 — то или к @ itsar (первые тесты нам понравились) или как у всех — что-то на основе талисман 2405 (у них много вариантов с разным креплением и разъемами, именно этот — бескорпусный). Цены — 100-200 долларов.
Если не RTK — ищите сами. Для RTK нужен малы размер фазового центра, а это означает дорогую антенну.
ARM для вычислений есть в любом приемнике, основной вопрос в прошивке… :-) Ну и размерах ПЗУ/ОЗУ, чтобы прошивку запихать…
Конкретно этот чип для России не годится — там нету ГЛОНАСС. Совсем, как класса. Вместо него — Beidou.
ToSHiC
А есть смысл упарываться и искать именно с ГЛОНАСС, если всё пот открытым небом происходит и за городом? На сколько выше точность будет?
heleo
Тут скорее вопрос не точности, а законодательства. Использовать такие чипы у нас разве, что для личного использования, но ни как в промышленном варианте для продажи внутри страны.
Jef239
А у нас разве ещё нет запрета на ввоз GNSS систем без ГЛОНАСС? Для себя лично вы ввезете, а для продажи? А получение сертификатов?
Глонасс нужен в основном, чтобы не иметь проблем с регулирующими органами. Остальное зависит от близости к Китаю. Если это забайкалье — так Beidou скорее всего сильно лучше ГЛОНАСС.
itsar
Это известные ребята. У меня есть их первый модуль с сырыми измерениями, который они краудфандили в черте-каком году. Могу дать поиграться.
По антеннам — обращайтесь.
ToSHiC
У меня сейчас есть пара S1315 с TTL-USB конвертерами от господина Баваро, хочу сначала их освоить. По поводу антенн он же рекомендовал попробовать Shorted Annular Patch, но я не смог найти готовых формул для расчёта, а какой нибудь HFSS даже не пробовал трогать.
Обращаться к вам готов, но точно не за кастомной разработкой — это же хобби для меня, совсем много денег вбрасывать (возможно, пока?) не готов.
itsar
HFSS — это наше все…
Если Вы про такую штуку — https://lirias.kuleuven.be/bitstream/123456789/286189/1/04459030.pdf, то она не особо дешевая вещь. Может, если ее сделать на текстолите будет и дешево, но потери могут быть большие.
Будет время, прикину такую антенну в HFSS. Спасибо!
ToSHiC
Оно. По-идее, если делать на хорошем высокочастоном субстрате, то тысячи в 3 рублей можно уложиться.
itsar
Я сейчас более внимательно посмотрел, подобную вещь можно сделать на воздушном резонаторе, и будет еще дешевле. Но эта антенна отличается от хорошей. Хотя они и пишут про защиту от многолучевости и хороший фазовый центр, она у них плохая. На графиках эллиптичность к горизонту сильно растет, КУ падает, что говорит о большой кроссполяризации и сильных вариациях фазового центра.
Так что, прошу прощения, я передумал. Такую антенну моделировать не хочу.
Могу сделать на воздушном резонаторе то же самое, когда руки дойдут.
Pavel9860
1. Кроме RTKLIB что еще можно применить из доступного? В принципе использование на открытой местности достаточно для моих целей.
2. Если RTK будет стабильно работать на 500 км на двухчастотных приемниках без промежуточных базовых станций, то это очень здорово. Если не секрет, какие алгоритмы используются и что для этого нужно? Сможете показать работу RTK на 300, 400 и 500 км если дам двухчастотные измерения в формате RINEX? Приемники JAVAD alpha.
3. Требования ICAO — 95% времени обеспечить отклонение не более 3 м по вертикали и 1 по горизонтали
http://www.icao.int/Meetings/PBN-Symposium/Documents/9849_cons_en[1].pdf
Эта точность достигается при получении поправок с геостационарных спутников
С учетом системы ближнего привода, радиовысотомеров это достаточно для безопасной посадки при любой видимости. Для коптеров можно поставить маленький радиодальномер за 4$ https://ru.aliexpress.com/item/Microwave-Doppler-Radar-Wireless-Module-Motion-Sensor-HB100-Microwave-Motion-Sensor-Motion-Detector/2030602758.html
4. Могу ошибаться, надо еще раз посмотреть
5. Да 0.1 это c запасом для получения максимальной точности. Если есть возможность, можете показать зависимость точности решения от времени задержки. Насколько сильно деградирует решение?
Jef239
Pavel9860
1. Доступность софта — до нескольких k$. Это вполне адекватно, если при этом получится заменить комплект за 5-8k$ комплектом базы + ровер за 1000$ (цена за комплект, а не стоимость модулей). Если есть решения, работающие реал-тайм и до 500 км, то стоимость не так критична. Можете что-нибудь подсказать?
2. Здесь трех частотные данные с 2х станций(расстояние 465 км) за 5 часов, RINEX 2.12. Нарезка по 15 минут.
3. Да, в той ссылке 95% результатов с точностью 3 метра по вертикали — это результат с применением SBAS, сами требования ICAO к 1 категории захода на посадку это 95% результатов с точностью 6-4 м по вертикали.
4. L2C (насколько понимаю L2X в RINEX версий 3.хх ) стабильно доступен, 6-8 (2/3 от общего числа) спутников видно постоянно. Можно работать уже сейчас, не обязательно ждать полной группировки. L2W работает всегда, каких-либо проблем с его приемом не было.
5. 1 Гц для движения не совсем хватает. Уменьшение точности до 10 см не здесь не так критично. Для тех, кто пользуется только дифференциальными поправками актуальность данных важна для точности.
P.S.Если будет стабильная сантиметровая точность на 1 приемнике за 1-2 K$, то это будет действительно прогресс, я первый встану в очередь за покупкой.
Только просьба побольше результатов и точных данных, поменьше непроверенной или устаревшей информации и пиара. Сам тоже постараюсь быть внимательней и проверять информацию.
Jef239
Если не трудно — опишите задачу. Пока просто не понимаю, что вам надо. Пиара нету, дешевый RTK c СКО 5 миллиметров можем показать. Но это одночастотники и в городском каньоне все сильно нестабильно. А что в ближайших планах — не очень можно описывать публично.
itsar
Кстати, я сейчас как раз работаю над тем, как обмануть природу в этом случае. Через пару месяце надеюсь что-то показать.
Jef239
ОГО! А цена какая будет?
itsar
Оно бы заработало, я о цене не думаю пока. Боюсь сглазить)
Да и вещь будет довольно специфическая.
Jef239
Но похоже, что у нас покупатель на это дело есть…
itsar
Я еще только тесто замесил, а уже и едоки подоспели)
Korogodin
Имеется в виду антенна размером с телефонную, или антенна именно для мобильного телефона? У них там много проблем с ЕМСом, я так понимаю, помимо фазового центра и усиления.
PS. Когда заходит речь про RTK через мобильный телефон, обычно даю ссылку на ИОНовскую статью: Kenneth M. Pesyna, Jr., Robert W. Heath, Jr., and Todd E. Humphreys. Centimeter Positioning with a Smartphone-Quality GNSS Antenna
itsar
Прочел внимательно. Мои усилия по повышению точности в мобильных устройствах сейчас сосредоточены в основном в антенном направлении. Хотя тема использования простых антенн мне тоже интересна. После прочтения статьи все больше, потому что авторы указывают на существенное ускорение сходимости задачи RTK при многочастотном приеме.
У них есть пара интересных выводов о других частях нашей дискуссии.
1. Они утверждают, что добавление спутников с плохим ОСШ в любом случае ускоряет сходимость.
2. Сходимость ускоряется также и при движении мобильного устройства.
Что особенно важно — статья дает надежду на реализацию высокоточных режимов в мобильных устройства. Спасибо, уважаемый Korogodin!
itsar
Я не могу найти нигде, как мне посмотреть результаты опроса.
Подскажите, пожалуйста.
grossws
Нажмите "воздержаться" или проголосуйте, тогда результаты должны быть видны.
itsar
Большое спасибо, дорогой товарищ!
Убился, но нигде не нашел об этом.
Я на Хабре новичок)