
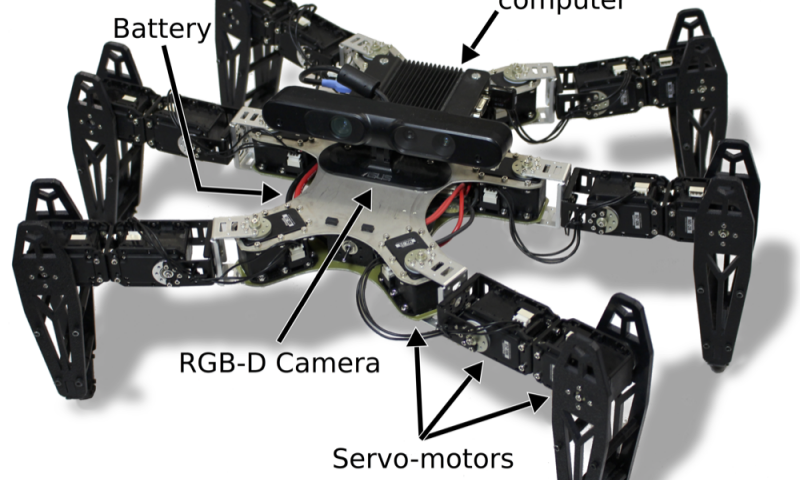
В журнале Nature была опубликована статья «Роботы, которые могут адаптироваться как животные» (Robots That Can Adapt Like Animals). В ней демонстрируется, как роботы могут восстанавливаться при травме менее, чем за 2 минуты. В видеоролике выше показано, как шестиногий робот адаптируется и продолжает шагать даже с двумя сломанными ногами. Разработанный алгоритм также применим к робо-руке.
Живые существа обладают сильной способностью к адаптированию к травмам. Собака может потерять лапу, но через некоторое время всё равно будет в состоянии играть со своим хозяином. Вывихнувший лодыжку человек найдёт способ продолжать движение. Эти возможности были бы очень полезны в роботах, которые также могут терять части своих тел. Как рассказывают исследователи, при травме животные не начинают обучение с нуля. Вместо этого они используют интуицию. Они подбирают несколько способов продолжать работу, тестируют их и выбирают подходящий. Команде учёных удалось создать роботов, которые делают примерно то же самое.
До начала функционирования робот использует компьютерную симуляцию процесса хода. Так составляется детальная карта поведения на основе нового эволюционного алгоритма MAP-Elites. В карте содержатся представления робота о различных методах работы и оценка их успешности. Гексапод получает повреждения и пытается использовать эти представления для управления алгоритмом обучения. Старые методы ходьбы уже не работают — карта составлялась для шести исправных конечностей. Проводятся эксперименты по быстрому обнаружению компенсирующего поведения и байесовская оптимизация. Новый алгоритм называется «Умный метод проб и ошибок» (Intelligent Trial and Error).
 После травмы робот учится. У него есть представления о предыдущих типах поведения, которые могут работать, и он начинает их тестировать. Но эти представления основаны на симуляции робота без повреждений. Поэтому нужно найти способ модифицировать их, чтобы заставить их работать. Робот производит эксперименты. Если одно поведение не работает, робот исключит его целую группу, и попробует что-то другое. К примеру, если движения передними ногами не помогают, робот попробует двигать задними. Согласно результатам экспериментов, самой важной частью является составление карты и работа с ней. Интересно, что движения гексапода в результате начинают напоминать движения раненого зверя.
После травмы робот учится. У него есть представления о предыдущих типах поведения, которые могут работать, и он начинает их тестировать. Но эти представления основаны на симуляции робота без повреждений. Поэтому нужно найти способ модифицировать их, чтобы заставить их работать. Робот производит эксперименты. Если одно поведение не работает, робот исключит его целую группу, и попробует что-то другое. К примеру, если движения передними ногами не помогают, робот попробует двигать задними. Согласно результатам экспериментов, самой важной частью является составление карты и работа с ней. Интересно, что движения гексапода в результате начинают напоминать движения раненого зверя.Исследователей поразила скорость обучения повреждённых роботов. Для адаптации требуется менее двух минут, в видеоролике этот процесс занимает 20—30 секунд. Иногда в результате адаптации шестиногий робот начинает двигаться чуть быстрее, чем раньше. Этот же алгоритм работает с множеством других роботов. К примеру, в видео показан тест руки-манипулятора, задачей которой была транспортировка объекта в заданную точку. Было продемонстрировано, что метод позволяет адаптироваться под потерю двух конечностей из шести и поломку двух двигателей руки-манипулятора. Гексапод смог подстроиться под шесть различных типов травм, робо-рука — под 14.
Новая технология может помочь в создании более автономных и надёжных роботов. Поисково-спасательные операции не будут связаны с пристальными вниманием к роботам, а персональные роботы-ассистенты продолжат оставаться полезными даже при серьёзных неполадках.
По материалам Phys.org и новостного сайта Вайомингского университета. DOI: 10.1038/nature14422.


super-guest
Вся эта теория понятна, интересна, и не очень нова. Гораздо важнее практическая реализация — на этом сейчас вся идея застопорилась. Использование камеры, лазера или шарика (как в шариковой мышке), например, не является универсальным решением для оценки КПД. Причём даже на нашей планете, не говоря уже о других, где другие среды, гравитация и т.п. Поэтому мне интересно узнать, какой способ оценки КПД использовали они.
А все эти секунды — маркетинг какой-то. Измени мощность бортового компьютера или сложность способа передвижения — изменится и время.