
Это видео где Marc Raibert основатель Boston Dynamics рассказывает про роботов: BigDog, Spot, SpotMini, Atlas. На основании этого видео и других видео где выступал Marc, я опишу кратко технологии роботов и дальнейшие планы компании.
Marc Raibert основал компанию Boston Dynamics 25 лет назад, но она еще не выпускала своих роботов в производство. Объясняет это основатель тем что компания работала все это время на опережающее развитие за горизонтом возможностей текущей робототехники. Тем не менее в своих роботах компания достигла того уровня когда стало возможным сделать небольшого электрического робота на четырех ногах способного автономно передвигаться по пересеченной местности и зданиях. Поэтому они собираются начать массовое производство робота SpotMini в середине 2019 года в количестве 1000 штук в год.
На данный момент уже 10 роботов испытывают потенциальные заказчики, еще 100 будет поставлено в течении года для тестов.
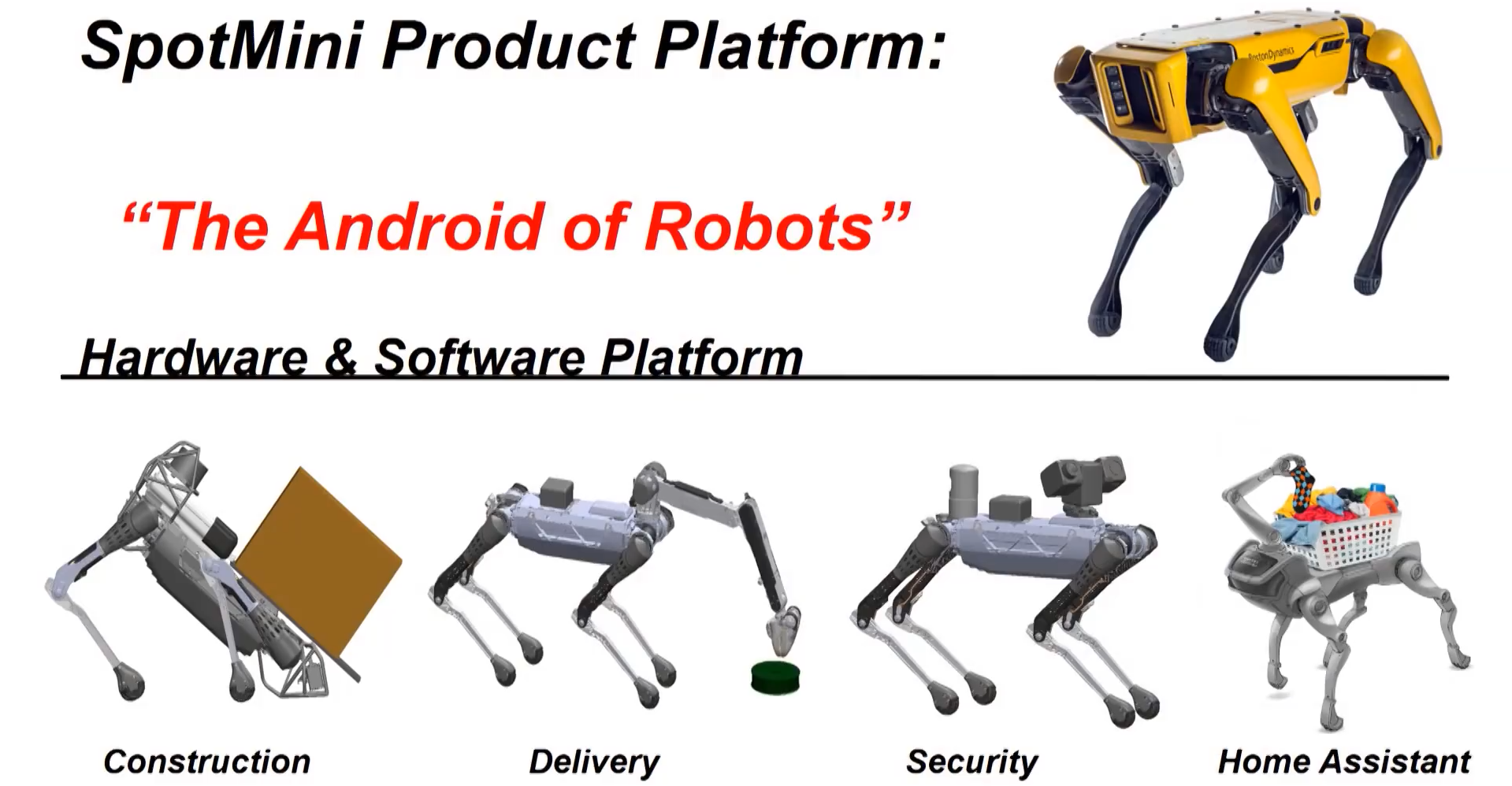
Робот будет продаваться как платформа на которую можно установить руку. У него есть API с помощью которого сторонние разработчики смогут писать свои приложения и пользоваться основным функционалом робота. В видео есть несколько демонстраций таких приложений.
Подразумевается что Boston Dinamics заложила базовый функционал в робота и оператору робота или стороннему разработчику можно отдавать только высокоуровневые команды типа иди туда с такой то скоростью, подай банку с колой.
Marc заявляет что робот может действовать рядом с человеком и по сути является коллаборативным, что он обосновывает в видео тем что робот весит всего лишь 27 килограмм и по этому не может причинить вреда человеку.

SpotMini умеет обнаруживать банку с колой, захватывать и переносить в другое место или отдавать людям. На фото выше как раз пример приложения для робота которое выполняет такую задачу.
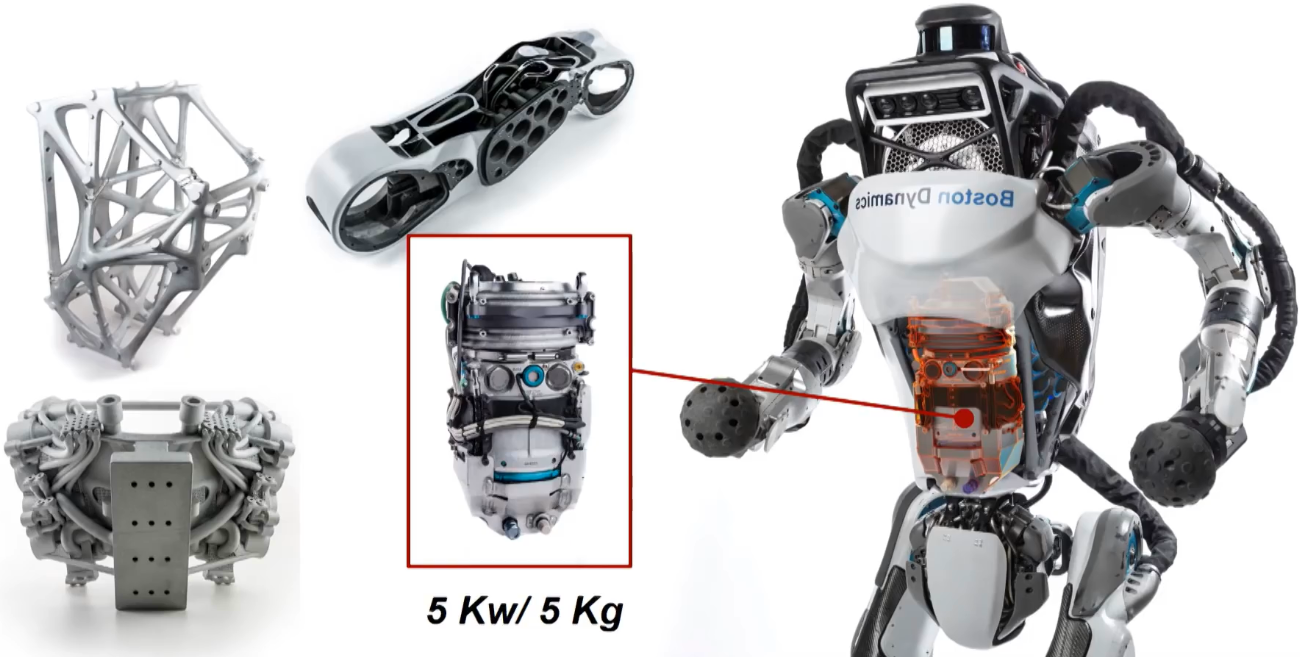
Также интересен рассказ про технологии примененные в роботе Atlas. Первоначальный вес робота удалось снизить с 170 килограмм до 75 при той же энерговооруженности. При этом робот стал гораздо проворнее и способнее. Этого удалось добиться за счет новых методов конструирования и 3d печати. В видео показывается нога робота напечатанная на принтере, которая весит в разы меньше при той же прочности.
Особенно стоит отметить про энергетическую установку. В видео Marc говорит что им удалось уместить в нее: двигатель, насос, фильтр, коллектор и тепловую рубашку с аккумулятором в живот робота, при этом вес всей этой конструкции составил 5 килограмм при мощности 5 киловатт. Опять же он говорит что это было бы не возможно без передовых методов проектирования и 3D печати.


В другом видео он рассказывает про робота Handle, он планируется как логистический робот способный переносить грузы быстро на дальние расстояния, так как вместо ног у него колеса.
Небольшой реверс инжиниринг от меня:

В видео Marc Raibert говорит что в роботе используется 5 модулей камер, две спереди и по одной слева, справа и сзади. От лазерного лидара они по видимому в коммерческой версии отказались. На фото видно что модуль камер какой то не стандартный, всего можно разглядеть 5 камер в модуле, возможно несколько из них это инфракрасная камера с приемником. Также видно что две камеры мелкие и как бы под углом друг к другу. Если кто то знает что это за модуль напишите в комментариях. Из всего этого можно сделать вывод что робот обходиться только стерео камерами, возможно с инфракрасной камерой глубины. Алгоритм позиционирования и локализации скорее всего визуальный SLAM, какой не понятно. Вообще компания Boston Dinamics довольно закрыта и мало рассказывает о программном обеспечении своих роботов, но на форумах люди в ней работавшие пишут что у них свой проприетарный код, в основном на C++ и немного на Python. Есть упоминание о использовании Drake. Возможно в роботе Atlas на соревнованиях частично использовался ROS.
По механике и расчету движения конечностей роботов, исследования Marc Raibertа тянуться со времен основания им лаборатории по движению ног в 1980 году и написанием книги Legged Robots that Balance в 1986 году. Также из исследований MIT которые я описывал в прошлой статье по слепому роботу гепарду можно сделать вывод что похожие методы используются и в SpotMini так как Marc Raibert был профессором в MIT.
По сути это будет первый достаточно функциональный и сложный робот который будет повседневно использоваться рядом с человеком. Пока он умеет только хватать банку с колой и женские сумки, то ли еще будет: )
Комментарии (26)

JobberNet
12.07.2018 13:39Автономно без облака и связи с сервером работать может?
AmigoRRR Автор
12.07.2018 13:50+1в одном из видео Marc говорит что изначально на SpotMini стояло три компьютера на i7, сейчас оставили один и да с его слов все просчитывается на роботе без облака
chaynick
13.07.2018 15:53Делать обсчет кинематики в облаке крайне невыгодно — на критерии Найквиста видно.
martin__marlen
12.07.2018 14:11Интересно, кто первый научит роботов такого типа воровать в магазинах.
Уже вижу на дверях супермаркетов знак с перечеркнутой фигуркой робота.martin__marlen
12.07.2018 14:17И, наоборот, Супермаркеты, где ты делаешь заказ, разговаривая с ИИ, который попутно разводит тебя на всякие ненужные ништяки, а роботы в это время шустрят по полкам собирая заказ. а потом везут его на себе к твоей машине.
Wizard_of_light
12.07.2018 15:20Первый закон робототехники от «Бостон Динамикс»: «Робот не может причинить вреда человеку (потому что весит только 27 кг)».
Вообще говоря, 27 кг это уже немало, особенно если эти 27 кг железные и с размаху на ногу падают. А раньше SpotMini вполне себе мог брякнуться, поскользнувшись на повороте. Не знаю, пофиксили ли сейчас ему устойчивость.clawham
12.07.2018 16:32то пример safe режима типа когда чтото выходит за пределы — он складывается ёжиком и тупо летит как земля ему укажет. минимизация повреждений механики.
woodoodm
12.07.2018 18:39Брякнунся он не просто на повороте, а на банановой кожуре. Тут уже другая тема, как распознование объектов, их физиологических свойств и тема выходящая за рамки современной автоматизации. Там показали, как он при опракидовании концентрируется для минимизации ущерба.
AmigoRRR Автор
12.07.2018 21:57В одном из своих интервью Marc говорит что на ролики в ютубе, где они пинали и толкали роботов, было много жалоб и негатива. Поэтому кстати Google и продала Boston Dinamics. Так вот чтобы обойти это, они вместо того чтобы пинать и толкать робота, решили показать на видео что он может выйти из сложной ситуации подложив ему на пути банановую кожуру.
Wizard_of_light
12.07.2018 22:14Тут проблема не в том, что он вышел из ситуации, а в том, что он в неё вошёл :) Когда роботов пинали — они с ног не падали, а тут вдруг простое скользкое покрытие его роняет.
Вообще «робот упал на ногу» — это только один из вариантов из серии «автоматический передвижной манипулятор случайноубивает всех людейповреждает человека». Мне по крайней мере видится куча кейсов «SpotMini несёт острый предмет/включенный электроприбор/бутылку бензина/бутылку кислоты/полотенце мимо плиты/колбасу мимо собаки/и т. п. и тут что-то пошло не так». Владелец, конечно, ССЗБ, но он это поймёт уже потом, как в случаях с автопилотами было.AmigoRRR Автор
12.07.2018 23:24Люди в гололед тоже падают. По поводу того как сделать чтобы робот не причинил вред человеку, так над этим сейчас инженеры всего мира и бьются. Промышленных роботов которые работают на заводах, делают уже давно, только их закрывают от человека железными клетками. А робота который в 100 процентах случая определяет перед собой человека и избегает столкновения с ним, пока никто не сделал.
pneuman
13.07.2018 02:27В видео Marc говорит что им удалось уместить двигатель внутреннего сгорания, насос подачи топлива, фильтры и карбюратор с аккумулятором в живот робота
там точно ДВС? Может, все-таки электродвигатель?VIPDC
13.07.2018 10:15Меня другой вопрос интересует там точно 5 кВт? в таком то объеме и в 5 кг?
Дайте мне таких два термоса, и можно на электро мобиле хоть куда.
А вообще сейчас обычный генератор на 5 кВт весит примерно 100 кг, например первый попавшийся.
AmigoRRR Автор
13.07.2018 13:24that's the power supply for Atlas and it
weighs five kilograms and it puts out
about five kilowatts of power that is a
very high density and we achieved that
by integrating a motor a pump a
reservoir and accumulator filters and
all the connectivity a heating jacket
and many of those components are printed
into a design that halves everything
together now I have to warn you doing it
this way is very labor-intensive still
you need a lot of engineering design
it's very expensive and in some cases
it's slow but I believe as these things
mature this will be the future over thepneuman
13.07.2018 14:27нигде не написано, что там ДВС. Я это видео с Марком тоже смотрел и не расслышал чтоб он хоть раз ДВС упоминал
AmigoRRR Автор
13.07.2018 15:10Я в начале видео говорю что это мой вольный перевод и интерпретация на основе других его интервью. те компоненты которые он перечисляет могут быть скорее использованы для двигателя двс и гидравлической системы. теоретически возможно что они используют гидравлическую систему с электрическим мотором, но в этом нет смысла, так как проще уж тогда было сделать как на spotmini без гидравлической системы на электрических двигателях.
Chamie
13.07.2018 16:41так как проще уж тогда было сделать как на spotmini без гидравлической системы на электрических двигателях.
Гидравлика позволяет иметь мощный центральный мотор (компрессор) и компактные сервоприводы, реализующие его полную мощность по месту. Ещё она позволяет накапливать энергию в специальных аккумуляторах, чтобы выдавать кратковременные усилия больше мощности мотора.AmigoRRR Автор
13.07.2018 18:34Может быть, только зачем тогда там тепловая рубашка и фильтр?
Chamie
13.07.2018 18:40Это вы “heating jacket” переводите как «тепловая рубашка»? Она, получается, обогревательная. Возможно, для обогрева при отрицательных температурах. Фильтр для рабочей жидкости, полагаю, для того же, для чего масляный фильтр в ДВС — от стружки и мусора очищать.
Chamie
13.07.2018 16:37Да, похоже, речь про электропривод гидравлики — компрессор, резервуар с рабочей жидкостью etc
iG0Lka
какраз хотел про роботов посмотреть, а тут какраз этот пост