

За последнее десятилетие большая часть шумихи вокруг робомобилей была сконцентрирована на идее, которую первой запустили в компании Google (теперь Waymo), а потом подхватили Tesla и другие. Это идея о робомобиле пятого уровня (полностью, на самом деле, по-настоящему автономного вождения вне зависимости от обстоятельств), который вы можете купить, чтобы навсегда блаженно расслабиться на заднем сиденье. Его можно отправить за детьми в школу, или приказать ездить кругами в ожидании вас, или даже послать найти себе парковочное место. Чуть позже стало ясно, что личные автомобили 5-го уровня придётся ждать гораздо дольше, а создать их будет гораздо труднее, чем казалось ранее в розовых мечтах. На выставке CES 2019, прошедшей в первой половине января, это мнение было подкреплено тем, как производители перешли от несбыточных обещаний, звучавших на предыдущих CES, к куда как более практичному подходу, и постепенной реализации планов.
5-й уровень становится дальше, а не ближе
Прошлый год был полон настораживающих признаков и препятствий для разработки робомобилей. Наиболее известен тот факт, что аварии с участием машин от Uber и Tesla подняли вопрос о том, понимают ли вообще эти компании, что делают. Кроме того компания Waymo, бесспорный лидер на пути продвижения к 5-му уровню, выполнила свой собственный дедлайн по выпуску роботизированных такси в конце 2018 года наиболее мягким из возможных способов, запустив небольшое количество пробных образцов в ограниченных условиях на некоторых маршрутах. Tesla убрала со страницы заказа опцию «полностью автономное вождение», чтобы «не сбивать людей с толку» (видимо, под этим подразумевается тот факт, что опция, которую человек заказал уже несколько лет назад, так и не появится в его автомобиле).
Если говорить о плюсах, то были и положительные подвижки в области робомобилей, указывающие на появление в ближайшем будущем примеров их реального использования и компаний-победителей. И три таких случая показались мне наиболее интересными.
Aptiv: на уровнях 2, 3 и 4 можно заработать кучу денег
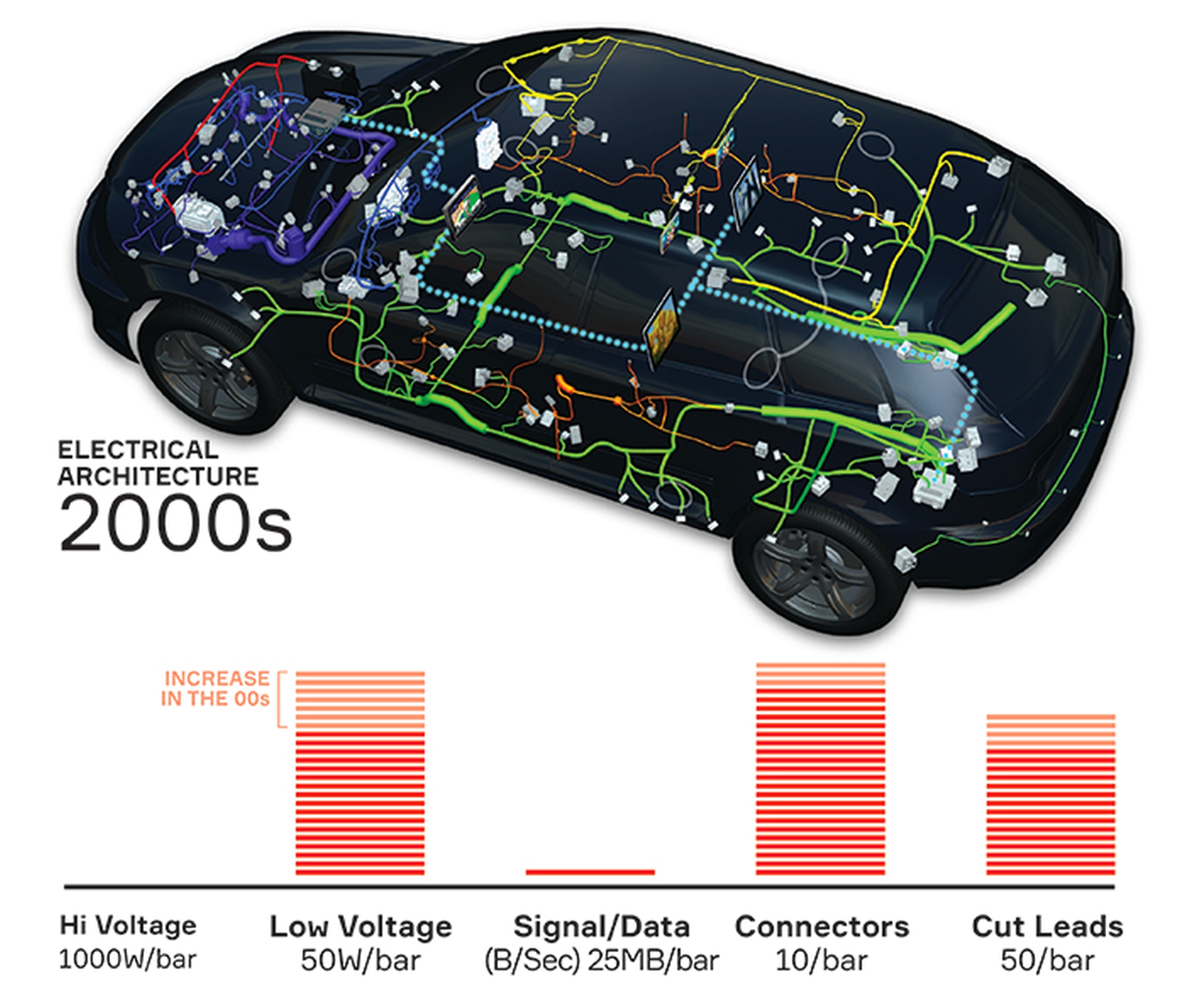
Одна из проблем практически для всех компаний, пытающихся выдать машину 5-го уровня, состоит в том, что это денежная дыра. Если вы не напоминаете компанию Google, которая практически печатает прибыль, или Tesla и Uber, которым пока удавалось получить нужное им финансирование, то это очень затратное занятие без видимого выхлопа в ближайшем будущем. Но для лидирующего поставщика автомобильных запчастей Aptiv (бывш. Delphi) переход от 2-го к 5-му уровню кажется просто естественным развитием её бизнеса автомобильной электроники. Они разработали передовую архитектуру, которая, по их мнению, поможет автопроизводителям начать интегрировать различные системы помощи вождению, и постепенно улучшать их со временем.
Я совершил тестовую поездку в одной из машин, которую Aptiv предоставила компании Lyft в Лас-Вегасе, и это была интересная демонстрация её возможностей. Машина была похожа на ту, что использовалась в прошлом году, но её системы обновили, увеличив функциональность. К примеру, там появилась RTK (кинематическое дополнение GPS в реальном времени), что позволило автомобилю определять своё местоположение с точностью в 2,5 см (вместо предыдущих 10 см). Такая точность даёт возможность различить, стоит ли пешеход на краю тротуара или на пешеходном переходе. Впечатляюще, и не удивительно, было то, что за те несколько километров, что я проехал в машине, вмешательства оператора не потребовалось. Мы объезжали автобусы, пешеходов, делали развороты на 180 градусов на загруженных шестиполосных улицах.
Nvidia также сделала серьёзный шаг в этом направлении. До того она в основном рекламировала то, как её компьютер Pegasus высокого класса идеально подходит для проектов 5-го уровня. Вероятно, осознав, что каких-то серьёзных объёмов продаж в сегментах 5-го и даже 4-го уровней в ближайшем времени ждать не приходится, Nvidia запустила решение для уровня 2+ — автопилот DRIVE, основанный на менее дорогой системе Xavier SoC, чтобы пристроиться к большим и постоянно растущим объёмам продаж машин с системами помощи водителю и автоматической безопасности.
Deere: «А мы вообще-то предлагали автоматическое вождение ещё до того, как люди о нём что-то знали»

John Deere уже порядка 15 лет встраивает технологии автономного вождения в свои трактора. Нам удалось покататься в текущей версии, и она оказалась не только впечатляющей с точки зрения технологий, но и убедительно полезной. Многие фермеры по 12-15 часов в день водят эти трактора туда и сюда по полям. Любая ошибка стоит раздавленных растений. Наш водитель указал, что это всё равно, как если бы вам пришлось водить свою машину по белой разметке на краю дороги весь день, и каждый раз при отклонении у вас пропадало бы $3. Топовые трактора JD имеют системы RTK и обзорные камеры, и способны ездить с точностью в 2,5 см.
JD также предлагает хитроумную систему «запоминания пути». Не все поля идеально ровные, не на всех сельхозкультуры растут в прямых линиях. Тракторист может проехать по своему полю один раз, а затем трактор будет сам повторять этот путь при необходимости. Это позволяет фермеру выполнять другие важные задачи – например, контролировать то устройство, что прицепляется к трактору. Если, к примеру, нужно ехать чуть правее или левее, чтобы не наезжать на высаженные растения, то заученный путь можно сдвигать в одну или другую сторону. Мы сами наблюдали за тем, как массивный трактор идеально ехал по нашим следам, идущим волнообразным путём.
Существует множество похожих способов применения этой технологии, например, большие фабрики или шахты. Технология даёт мгновенное преимущество и является на сегодняшний день вполне реалистичной. Просто она не так привлекает внимание общественности, как робомобили.
Роботакси будут — просто не такие, как мы думали
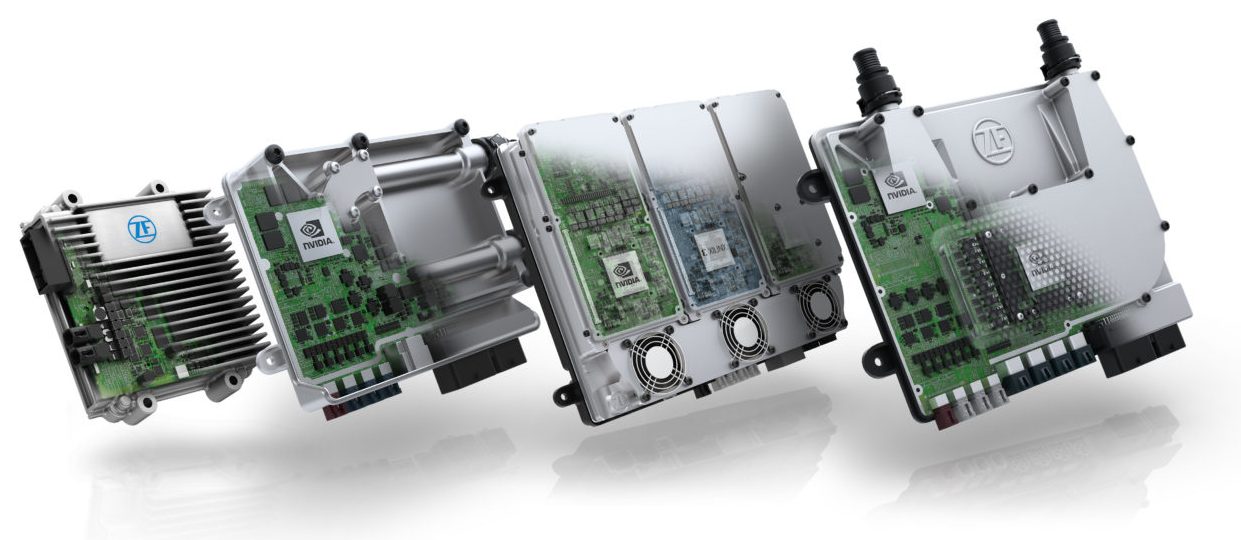
Nvidia DRIVE AGX Xavier
Многие компании поделили задачу достижения 5-го уровня на этапы, чтобы с ней было проще работать. Некоторые ограничивают место работы робомобилей областями, в которых легче ориентироваться – как Voyage и его работа в районах, где живут пожилые люди. Другие склоняются к областям применения, не включающим передвигающихся людей, например, робот по доставке продуктов от компании Nuro, объединившейся с Kroger для разработки автономной доставки. Иные же, например Aptiv (совместно с Lyft) и Cruise (часть GM) работают с расширенным применением 4-го уровня, с некоторыми ограничениями. Они ограничили зоны поездок машин областями, которые тщательно разметили и пристально отслеживают, и где можно проводить необходимое обновление инфраструктуры. Ещё у них нет ограничений по цене, поскольку коммерческие машины для лизинга отличаются большим коэффициентом использования, поэтому могут быть существенно дороже персональных. Они могут отслеживать машины из операционного центра и вмешиваться по необходимости – такой вариант недоступен обычному пользователю, отправившему свой автомобиль выполнять какое-то поручение.
Роботакси также приоткрывают завесу над возможным будущим перевозок. Большинство экспертов индустрии утверждают, что когда мы поближе подберёмся к 5-му уровню, у большинства людей не будет персональных автомобилей, они просто будут подписываться на «услуги передвижения». Очевидно, исключение составят любители посидеть за рулём автомобиля, живущие в сельской местности, но любой человек, живущий в местности с достаточно плотной застройкой и не получающий особого удовольствия от самостоятельного управления автомобилем, или не желающий обладать своим личным автомобилем, сможет просто полностью отказаться от владения таковым.
Не все соглашаются с подобными предположениями. К примеру, Zoox считает, что сможет самостоятельно разработать, создать и продать робомобиль 5-го уровня за срок меньший, чем считают возможным остальные. Вскоре мы узнаем, так ли это.
Комментарии (63)

ghrb
26.01.2019 15:00> К примеру, там появилась RTK (кинематическое дополнение GPS в реальном времени), что позволило автомобилю определять своё местоположение с точностью в 2,5 см (вместо предыдущих 10 см). Такая точность даёт возможность различить, стоит ли пешеход на краю тротуара или на пешеходном переходе.
Судя по контексту речь о инерциальной навигации для дополнения GPS. Причём здесь положение пешехода?AlexSky
26.01.2019 22:09Нет, RTK — дифференциальная GPS, где есть базовая станция с известными координатами, а на подвижный приёмник передаются поправки по радиоканалу или через сотовую связь. Поправки позволяют учесть искажения, вносимые ионосферой, что радикально повышает точность.
LittleSquirrel
26.01.2019 23:58Расстояние до пешехода определяется относительно движущегося автомобиля. Увеличение точности локализации поможет точнее привязать цели к инфраструктуре на карте. Применительно к пешеходу это поможет лучше настроить предсказание движения цели. Например если горит красный и человек еще на тротуаре — вероятно он останется стоять, можно ехать. Если на проезжей части — перебегает, нужно тормозить.
RusikR2D2
26.01.2019 15:09+3Начали бы выпускать хотя бы ассистента для водителей в виде отдельного компьютера с датчиками и монитора. Чтобы подсказывал, что можно, а что нельзя делать. К примеру, тут нельзя парковаться (водитель не заметил знака) или вот тут разметка и т.п. Некая расширенная версия навигатора, но без задержек и учитывающая реальную обстановку вокруг. Т.е. показывать на экране то, что «указывают» делать робомобилю, но без вмешательства в управление.
dedyshka
26.01.2019 16:36Тупиковое направление. Через несколько лет прогресс шагнёт вперёд и такие ассистенты будут никому не нужны.
Это как делать крылья, крепящиеся к человеку, чтобы он бежал периодически подпрыгивая и планируя на несколько метров. Вместо того, чтобы сосредоточить силы на разработку и тестирование самолёта.RusikR2D2
26.01.2019 16:42Не факт, что так скоро. Несколько — это может быть и больше десяти. Опять же, старая техника не сразу исчезнет с дорог.
А для разработчиков, с одной стороны — это дополнительная прибыль, а с другой — статистика по поведению на дорогах.
К высказыванию про крылья: Сравнение не очень. Все делается постепенно. Сначала совершенствовали винтовые самолеты, а не сразу сосредоточились на реактивных. Стоит отметить, что винтовые самолеты и сейчас существуют и занимают даже определенную нишу. И тем более никто не бросил реактивные самолеты, когда могли бы делать пассажирские ракеты. И да, «крылья» для планирования же остались — парапланы, дельтапланы, планеры… Просто тоже встали «отдельно».Diordna
27.01.2019 21:52Вы имеете в виду киты для гиков которые прикрутят это к своим авто? Если да то
1. Сертификация и ответственность производителкй перед властями
2. Статистика будет сильно зависеть от того насколько криво пользователи прикрутили китай своим автомобилем
Три. Очень мало поэтому продукт получится не массовый и дорогойRusikR2D2
27.01.2019 22:531. Сертификат — как обычный компьютер. Он никак не связан с управлением машины, а просто выводит на экран подсказки
2. Тут ХЗ, но навигаторы же прижились. И отечественные сервисы типа «Яндекс-Навигатора» процветают. Они вполне могут взять под свое «крыло»…roscomtheend
28.01.2019 12:48А андроид-авто с интеграцией с автомобилями позволил не ставить эту кочергу с телефоном, и таких всё больше, знаки могут быть и у навигатора, но актуальность (не говоря о временных) — вопрос.
lingvo
26.01.2019 18:52Это можно сделать с помощью мобильного телефона с камерой, GPS и подробных карт.
RusikR2D2
26.01.2019 19:02Не думаю, что так просто. Либо объяснил «хотелку» не очень хорошо. Я имел ввиду отдельно «мозги» робомобиля, но без подключения к управлению. Вместо этого результаты работы выводятся на монитор.
lingvo
26.01.2019 22:21Какие результаты работы вам нужны? Например, я думал о разработке и коммерциализации подобного устройства.
В первую очередь это должна быть система распознавания дорожных знаков с выводом на дисплей. Во вторую очередь она должна будет распознавать потенциально опасные ситуации — выход из полосы, пешеходов, велосипедистов, опасное приближение к впереди следующему автомобилю и т.дRusikR2D2
26.01.2019 23:08— Дорожные знаки, сигналы светофора и разметка с оповещением о нарушении (в том числе и потенциальном) ПДД. Совместно с навигатором помощь в выборе полос, мест для разворота, поворота и парковок. При распространении таких устройство возможен обмен данными между автомобилями.
— Потенциальные опасности в виде пешеходов, велосипедистов, появляющихся на дороге, особенно при плохой видимости. Потенциальные опасности в виде перестраивающихся машин, догоняющих машин, мотоциклов и т.п. быстро движущихся объектов. Аналог парктроника с «видом сверху» для маневрирования в стесненных условиях с подсказками для новичков. Постоянные логи об объектах, местах, разметке и пр, на тот случай если понадобится разбирательство.roscomtheend
28.01.2019 12:54Такое уже есть — системы экстренной остановки (в т.ч. реакция на пешеходов), слежения за полосой, чтения знаков с предупреждением о превышении, мониторинг слепых зон, круговой обзор (не считая парктроника с камерой с разметкой и автопарковки), но это есть не у всех и стоит некоторых денег, которые пользователи норовят экономить (а потом купить китайское устройство, делающее 10% от этого, только хуже, а потом его криво приколхозить в существующую систему).
lingvo
28.01.2019 13:29То ж понятно. Но есть упрямый факт — в такой "процветающей" стране, например, как Финляндия, средний возраст автомобиля — 14 лет. И не особо они там пересаживаются на современные автомобили. Поэтому для них это был бы выход, как и для многих других стран.
roscomtheend
29.01.2019 16:10Будут ли они устройство ставить? Тем более что большая часть без корректной установки будет работать плохо (разве что чтение знаков более-менее будет работать) или не будет вообще.
LittleSquirrel
26.01.2019 23:47Первая часть, распознавание знаков, уже давно есть.
«Вторая очередь» в большинстве действительно критических ситуаций живому человеку ни к чему. Просто нехватает скорости реакции. У меня есть опыт тестов AEB, на полигоне, на «выбегающем пешеходе» на скоростях больше 100км/ч. Там в лучшем случае успеваешь краем глаза вылетающий манекен заметить, до того как на ремнях повиснешь.
В менее критичных ситуациях все уже есть на серийных машинах: LKA/LDW, lateral distance warning, пищалки предупреждающие о возможном наезде…lingvo
27.01.2019 23:29Он это хочет для ретрофита, поэтому то, что оно в новых серийных авто есть, как бы не особо греет.
В принципе не проблема что-то такое сделать, только я бы сместил акцент в первую очередь к предупреждению аварийных ситуаций вследствии невнимательности и/или замедленной реакции (утомление, сон). Это должно дать больший положительный эффект. А потом уже всякие нарушения ПДД или парктроники.
LittleSquirrel
27.01.2019 23:48Как ретрофит это конечно хорошо, но только в виде предупреждающих сигналов. Активное вмешательство в управление приходится достаточно долго допиливать под каждую конкретную модель, это при непосредственном участии команды на стороне автопроизводителя. Что наваяют творители китайского ретрофита мне страшно представить.
Например идея где-то тут уже помянутого comma.ai меня приводит в ужас и кроме надежды что их с такой концепцией быстро засудят/закроют ничего не вызывает.
А так стартапы уже есть, как раз в такие продвинутые дэш-камы они целятся, для Штатов в течении года-двух будет.
xRay
26.01.2019 21:20Машины у некоторых производителей умеют считывать и знаки и светофоры. К примеру у BMW машина по светофору вообще может двигатель глушить и включать когда можно ехать. А знаки считывает и показывает текущее ограничение скорости прямо со знаков.
RusikR2D2
26.01.2019 22:49Вот! Только бы еще отдельным модулем для самостоятельной установки (и по гуманной цене)…
LittleSquirrel
26.01.2019 23:42Уже есть пару стартапов пилящих такое в формате даш-кэм. Подождите год-два.
Lolman
26.01.2019 23:48Есть такой: comma.ai. Причем, можно поставить софт на свой Android-смартфон, а купить только OBD-to-Bluetooth коннектор за 30$. Но перечень автомобилей, которые поддерживают управление от внешнего девайса пока сильно ограничен.
khim
27.01.2019 00:23С «гуманной ценой» всё очень плохо. Все эти автоновные автомобили имеют уйму датчиков.
Если сранивать их с зарплатой водителя за год-два (а именно такова должна быть экономия от автономных автомобилей) — то цена не кажется страшной. Если же сравнить со стоимостью автомобиля без датчиков…
lingvo
26.01.2019 19:00Блин, да я уже сейчас готов купить автомобиль с 3-им или 4-ым уровнем автопилотирования за любые деньги, лишь бы этот автопилот 100%-но работал на европейских автобанах и развязках между ними, включая зоны ремонтов. И пусть держит скорость хоть 100км/ч — мне достаточно. Все.

tcapb1
27.01.2019 15:17А мне кажется, что вождение автомобиля 3 уровня не проще, чем обычного нероботизированного автомобиля, а сложнее.
Я только за то, чтобы машина парковалась за меня или например предотвращала удар, если я вдруг зазеваюсь. Однако позволить автомобилю большей частью ехать самому, однако постоянно быть на чеку на случай нештатной ситуации для меня лично мучение. Если я сам не управляю машиной — мозг переключается из режима водителя в режим пассажира, и наблюдение за дорогой становится тяжёлой работой. Я не смогу смотреть на дорогу не отвлекаясь, если моих действий 99.9% времени не требуется. Даже если я не уткнусь в телефон — я могу залюбоваться пейзажем или погрузиться глубоко в мысли, в итоге не заметив тот 0.1% действий, когда моё вмешательство будет необходимо.
Начиная с 4 уровня уже ок. Но 3 уровень — издевательство.khim
27.01.2019 18:53Проблема и с 3м и с 4м уровнем — в том, что они никому нафиг не нужны. Ровно по описанной вами причине. Нужен, условно, уровень «5 минус» — когда вы заранее знаете что в какие-то места автономный автомобиль не поедет и ведёте там его сами. А вот везде, где он «знает дорогу» — он ездит сам без вашего вмешательства.
Собственно и то, что говорит ваш оппонент — это о том же: «мне нужен автопилот третьего или четвёртого уровня»… но такой, чтобы он «100%-но работал на европейских автобанах и развязках между ними, включая зоны ремонтов»!
Извините — но это, как бы, уже почти 5й уровень… раз мы говорим не о 99%, а о 100%…lingvo
27.01.2019 23:38Нужен, условно, уровень «5 минус» — когда вы заранее знаете что в какие-то места автономный автомобиль не поедет и ведёте там его сами. А вот везде, где он «знает дорогу» — он ездит сам без вашего вмешательства.
Вообще-то согласно классификации это и есть 4-ый уровень — когда водитель присутствует в машине, но может даже спать — «mind-off“. А 3-ий уровень — это реакция водителя в течении какого-то ограниченного промежутка времени — «eyes off». 5-ый — это без водителя.
LittleSquirrel
28.01.2019 00:03Мне кажется Вы не совсем правильно понимаете классификацию и от чего она так написана. Человек вполне себе хочет L3 Highway Autopilot как его понимают японские OEM, в идеале плавное переходящий в L4, как грозится сделать Ниссан.
Разница в том, что система работает только в конкретном сценарии: шоссе, с встречным траффиком отделенным барьером, остуствием пешеходных переходов, непосредственных перекрестков и прочими ограничениями. В L4 рамки " сценария" расширяются до покрытия б0льшей части «обычных» ситуаций и увеличивается время на передачу управления.lingvo
28.01.2019 11:01Да, причем я не прошу расширения по зоне покрытия. Нет. Я хочу конкретно, чтобы этот L3 или L4 работал только на автомагистралях — как вы написали, без встречного трафика, без пешеходов и светофоров. В итоге таким образом можно проехать почти всю Европу чисто на автопилоте, порулив всего лишь полчаса от дома до автобана и от автобана до места назначения.
Почему именно автобаны? Да просто потому что на них происходит меньше всего ДТП с серьезными последствиями, несмотря на более высокие скорости. Поэтому даже если автопилот сойдет с ума, вероятность того, что он кого-то убъет достаточно маленькая. Но ущерб ессно все равно должна покрывать страховка.
khim
28.01.2019 12:32шоссе, с встречным траффиком отделенным барьером, остуствием пешеходных переходов, непосредственных перекрестков и прочими ограничениями
… и где какая-то дура ночью прётся со своим велосипедом посреди дороги, да.
Вы только описали (с моим дополнением) ситуацию с известным происшествием.
В L4 рамки " сценария" расширяются до покрытия б0льшей части «обычных» ситуаций и увеличивается время на передачу управления.
Автомобиль — не самолёт, у вас не будет 10-15 минут, чтобы «проснуться» и начать соображать «что происходит, в конце-концов».LittleSquirrel
28.01.2019 15:45Перебегающий шоссе человек это один из safety corner cases, по сути подвид более частого: лань/олень на дороге. Там их больше рассматривается, и водитель рядом со сломавшимся авто и выпадающий груз и другие «веселости». Разница с ездой по городу в частоте таких ситуаций и в реакции на них. Для Highway Autopilot это чрезвычайная ситуация, на которую можно реагировать «педалью тормоза» в пол. Для городского L4/5 частота перебегаюших дорогу людей будет на порядки выше и интенсивное торможение так применять нельзя, потому там более сложные алгоритмы получаются.
Ни 10 ни, тем более, 15 минут для включения в контур самолета тоже нет. Например печально известный «донецкий» Ту 154 падал с почти предельного для ГА эшелона меньше 3 минут. Но самолет остановить нельзя, что вполне по силам L3 — L5 системам.
Упрощая основная разница между L3 и L4 в том, что первая работает только в рамках своего конкретного сценария/среды, тогда как вторая — везде, кроме оговоренных сценариев/состояний.
lingvo
27.01.2019 23:44Уровень 3 не требует мгновенной реакции. Вы можете смотреть в окно или читать книгу. В данном случае автопилот гарантирует безопасность, если вы возьмете на себя управление в течении нескольких секунд. Если говорить о тех же автобанах, то при потере разметки или резком ухудшении видимости автопилот 3-го уровня снизит скорость и начнет останавливаться на обочине, включив аварийку. В этой ситуации надо реагировать в течении десятка секунд. Автопилот 4-го уровня в такой ситуации доведет до ближайшей парковки и припаркуется.
LittleSquirrel
27.01.2019 23:56Пока все L3 Highway Autopilot к которым я видел ТЗ и которые появятся на рынке в ближайшие пару лет расчитывают на передачу управления водителю в интервале от 30 до 90 секунд. Потом система начинает тормозить, согласно дорожной обстановке, и съезжать на обочину.
В телефон залипнуть или фильм на инфотейменте посмотреть наверное получится, но вот обед на коленях разложить уже вряд ли.
tcapb1
28.01.2019 00:16Ну да, получается, что я скорее L2 описывал. Надо было сразу лезть за описанием в английскую вики, а не пытаться уточнять на русских сайтах. Другое дело, что L3 предполагает eyes off на автобанах в идеальных условиях, а в зоне ремонта вполне может сваливаться в L2 или вообще в ручное управление.
lingvo
28.01.2019 11:08Другое дело, что L3 предполагает eyes off на автобанах в идеальных условиях, а в зоне ремонта вполне может сваливаться в L2 или вообще в ручное управление.
Ну это как-бы вопрос решаемый. Главное, чтобы этот ремонт был правильно обозначен знаками и разметкой и тогда у автопилота тоже не должно быть с этим проблем.
fivehouse
27.01.2019 14:105-й уровень становится дальше, а не ближе
А потому, что хоть и с большим трудом, но приходит понимание, что даже полноценный(!) ИИ, когда его там сделают, будет нуждаться в существенном обучении, чтобы стать полноценным водителем. Реально удивляет, что эта мысль год-два назад автоматически вызывала припадки истерики и словесной агрессии у энтузиастов робомобилестроения.
Прошлый год был полон настораживающих признаков и препятствий для разработки робомобилей. Наиболее известен тот факт, что аварии с участием машин от Uber и Tesla подняли вопрос о том, понимают ли вообще эти компании, что делают.khim
27.01.2019 18:45С учётом того, что последние лет… всё, что происходит — это обучение ИИ возждению неясно кто и чего недоперепонимал.
Конечно ИИ нужно учить! Ровно для того с ним и ездят все эти инструктора.
А происходящее с Uber и Tesla — это банальная перестраховка и нагнетание истерики. Потому что представить себе, чтобы автошколу, в которой обучаются тысячи учеников закрыли из-за того, что один из этих тысяч учеников не справился с управлением и в кого-то въехал… невозможно: максимум — конкретного инструктора, допустившего «прокол» остранят на время разбирательств.
Потому что аварии при обучении вождению — не что-то уникальное, никогда не случающеся, а, наоборот — вещь обыденная (хотя смертельный исход редкость, конечно). Однако самоуправляемые автомобили оцениваются гораздо более пристрастно: любой человек, водящий машину так, как её водят уже существующие системы, давным-давно получил бы «корочки» и начал бы ездить самостоятельно.
fivehouse
27.01.2019 23:43Конечно ИИ нужно учить!
Тот псевдоИИ, который сейчас существует, невозможно научить полноценному вождению в принципе. Потому что это не ИИ, это рефлексивные автоматы с элементами обучения. Для полноценного вождения знания должны быть существенно более глубокими и разносторонними. И они никак не могут залезть в современный псевдоИИ сколько бы его не учили.
GeorgKDeft
28.01.2019 13:18… Прям напомнило что то из разряда компьютер никогда не сможет победить гроссмейстера в шахматы.
fivehouse
28.01.2019 16:33Прям напомнило что то из разряда компьютер никогда...
Это позывы к стандартному тролению. То есть один из приемов троля: шаг один — исказить смысл того, что пишет оппонент и шаг два — высмеять искаженное. Вы сильнее этого. Боритесь! Я в вас верю.
А в моем сообщении пишется не о компьютерах вообще в неизвестном будущем, а о современном псевдоИИ, который ныне в рекламных целях часто объявляют ИИ. И в этот современный псевдоИИ никак нельзя запихнуть требуемые знания для полноценного вождения. Тут можно целые страницы исписать списком задач, которые требуется решать водителю, и которые никак не в состоянии решить современный псевдоИИ, как долго бы его не учили.GeorgKDeft
28.01.2019 20:41Ну не знаю что входит в приемы тролля, так что если не трудно в сообщении скинете полный список ок? А то я просто об ощущении о фразе написал, а вы так сразу обвиняете в троллизме…
Реально почему вы вождение считаете недоступным для ИИ? Современный автомобиль и так все быстрее идет в сторону автоматизации многих процессов перемещения, и по факту автоматика лучше «видит», «ощущает» и «просчитывает» в процессе передвижения чем человек (навеяно примером ABS и ESP, а так же другими полуавтоматическими системами помощи водителю).
Что по вашему мешает заменить стандартный процесс вождения в большинстве случаев на автоматический?lingvo
28.01.2019 21:05Современный автомобиль и так все быстрее идет в сторону автоматизации многих процессов перемещения, и по факту автоматика лучше «видит», «ощущает» и «просчитывает» в процессе передвижения чем человек (навеяно примером ABS и ESP, а так же другими полуавтоматическими системами помощи водителю).
Что по вашему мешает заменить стандартный процесс вождения в большинстве случаев на автоматический?На автоматический — т.е. на основе автоматов состояний, теории автоматического управления, нейросетей для распознавания изображений и предметов — ничего не мешает.
На ИИ — есть некоторые проблемки...
GeorgKDeft
28.01.2019 21:33ну так если автоматики достаточно, то в чем проблема? Что подразумевается под ИИ? Некий сверхразум который любую задачу вождения может решить как Шумахер или Колин Макрей?
lingvo
28.01.2019 23:13Что подразумевается под ИИ? Некий сверхразум который любую задачу вождения может решить как Шумахер или Колин Макрей?
Да нет. Нужен всего лишь некоторый алгоритм, который спасет вашу жизнь в ситуации, не предусмотренной его разработчиком, с гарантией хотя бы в 99,9%.
GeorgKDeft
29.01.2019 00:14+1Вот это поворот… 99.9%? А автопилот самолета с этой задачей справляется?
Как то больше думал что проблема в том что автопилот-авто может кого сбить на своем пути, и тогда проблемы у разработчика будут серьезные.lingvo
29.01.2019 00:21Вот это поворот… 99.9%? А автопилот самолета с этой задачей справляется?
Нет, и это одна из причин, почему нужны пилоты.
LittleSquirrel
29.01.2019 10:29+1Если б с гарантией всего лишь 99,9% — L3 системы были б на рынке уже года 2-3 назад. «Проблема» что планка надежности задирается намного выше человеческой.
lingvo
29.01.2019 11:46Ну так заведено — человеку принято прощать ошибки, а железяке — нет.
Я так думаю, что дело в инстинкте самосохранения — человек-водитель инстинктивно будет искать выход из самой незаурядной ситуации и поэтому на это рассчитывают и доверяют, что он сделает все возможное и невозможное.
А как привить инстинкт самосохранения автопилоту? А если привить, как потом этот автопилот уничтожить — ведь он будет любым способом избегать этого?LittleSquirrel
29.01.2019 16:38Я бы сказал что инстинкт «самосохранения» скорее вредит «среднему» водителю, т.к. вгоняет его/ее в страх/ступор мешая принять хоть какое-то решение. Хорошие тест-драйверы/гонщики как раз отличаются пониженным уровнем страха и «отмороженностью» когда нужно.
Для автопилота проблема не в привитии «самосохранения» — как напишем так и будет. Проблема абсолютно в юридической плоскости.
Живой водитель всегда «крайний», доказать что произошедшая авария сугубо вина автопроизводителя и водитель ну вот совсем ничего не мог сделать — архисложно и долго. Все эти случаи можно если и не на пальцах пересчитать, то в сотню-две за последние сто лет уложиться.
За автопилот всегда будет отвечать автопроизводитель. И никакому топ-менеджеру совершенно не хочется проводить сотни и тысячи часов на судебных разбирательствах, потому они выставляют требования чтоб система, по сути, не давала сбоев за время активной жизни авто. И при этом не стоила как сам автомобиль. И вот собрать две эти хотелки и представляет проблему.lingvo
29.01.2019 16:56Живой водитель всегда «крайний»
Дык это и есть оно. Водитель знает, что он будет "крайний" и соответственно так себя ведет — не идет на необдуманный риск, не делает необдуманных маневров, не употребляет алкоголь за рулем.
А у автопилота такого чувства нет. Он ни за что не отвечает, а отвечает его разработчик. Представьте, что за все аварии несет ответственность не водитель, а тот, кто разработал автомобиль. Мы бы до сих пор пешком ходили.LittleSquirrel
29.01.2019 18:02Просто автомобилестроение бы развивалось темпами современной авиации. Права было бы получить примерно так же сложно, как и пилотское. Не знаю совсем ли это плохо, но жизнь изрядного количества человеков была бы другой.
fivehouse
29.01.2019 13:24Что по вашему мешает заменить стандартный процесс вождения в большинстве случаев на автоматический?
Ок. Начну длинный список принципиально не достижимого для современного недоИИ, но необходимого для полноценного вождения. И скорее всего достижимого для полноценного ИИ после обучения.
- Необходимо распознавать (с достаточной степенью достоверности) все объекты попадающиеся на дороге, даже те, с которыми сталкиваешься в первый раз.
- Необходимо понимать и ПРЕДСКАЗЫВАТЬ угрозу и опасность обнаруженных (неизвестных) объектов и степень их влияния на собственное движение, быстро вырабатывать и реализовывать непротиворечивые планы ведения машины в зависимости от изменения собственного понимания происходящего.
- Необходимо распознавать намерения других водителей. И моменты изменения этих намерений.
- Необходимо вести машину так, чтобы другие водители понимали твои намерения.
- Необходимо распознавать все типы дефектов дороги, все типы дефектов разметки и правильно себя вести в данном конкретном месте при данном конкретном дефекте.
- Необходимо правильно вести себя в случае происходящей аварии с собственной машиной и принимать решения в аварийных ситуациях.
- Необходимо правильно распознавать уже случившиеся ранее аварии на дороге и правильно вести в конкретной аварийной ситуации.
- Необходимо правильно распознавать все метеоусловия и природные явления (лавины, оползни, камнепады, ливни, град, потоп, высокие волны и т.п.), и их степень влияния на движение. И правильно вести при конкретном явлении.
- Необходимо распознавать намерения пешеходов. И моменты изменения этих намерений. И правильно вести в конкретных ситуациях.
- Необходимо вести себя предсказуемо для пешеходов.
- Необходимо по возможности распознавать намерения животных вышедших на дорогу. И моменты изменения этих намерений. И правильно вести в конкретных ситуациях.
- Хорошо обладать здравым смыслом во всех его проявлениях.
- Необходимо понимать распоряжения регуляторов движения.
- Список можно продолжать и продолжать…
khim
29.01.2019 14:01И какой процент «белковых» водителей всё это умеет? Если вы к ним примените все эти правила — никто никогда прав не получит. В принципе.
Так что это «хотелки» — имеющие мало общего с тем, что нужно автомобильному ИИ.fivehouse
29.01.2019 14:57И какой процент «белковых» водителей всё это умеет?
Почти все это умеют профессиональные водители с солидным стажем. И это все РЕАЛЬНО нужно «водителю» который имеет шанс массово попасть на дороги и состояние жизни и дорог будет зависеть от него. А часть всего это нужно каждую поездку и реально выполняется почти всеми водителями. Просто когда это называется своими словами, все понимают, что робомобилям до настоящих дорог еще очень далеко.khim
29.01.2019 20:59Почти все это умеют профессиональные водители с солидным стажем.
Ну то есть небольшой процент ездящих по дорогам — и то не факт.
lingvo
29.01.2019 16:09Кстати еще мелочь — необходимо знать состояние своего автомобиля, хотя бы резины, загрузки. И сопоставлять это с дорожной обстановкой и соответственно выбирать безопасную скорость и дистанцию.
Это вроде как неважно в стандартной ситуации, но именно в критических ситуациях от этого очень сильно будет зависить поведение автомобиля, что надо учитывать.
А как вы предлагаете сообщать данную информацию автопилоту?
LittleSquirrel
29.01.2019 16:30Через диагностику. Например датчики давления в шинах обязательны для систем с автопилотом. Многое можно «снять» с уже имеющихся сенсоров ABS/ESP, диагностика в машинах уже весьма общирна, нужно только начать анализировать. Плюс, обязательно, периодические визиты сервиса для проверки/калибрации сенсоров.
Несколько контор сейчас во всю разрабатывают системы оценки состояния дорожного покрытия (вода, лед, температура) как дополнительный карто-сервис для AD.lingvo
29.01.2019 17:02Ну вот, вы только что обозначили область разработки и улучшений на многие человеко-годы, если все это дело реализовать на автоматах. А человеку надо всего пара часов теории и практики, чтобы это схватить.
А как вы предлагаете обучать этому ИИ?LittleSquirrel
29.01.2019 18:01Во-первых, я совсем не предлагаю «обучать ИИ». Лично для меня пока не очевидно что L3-L4 нельзя сделать на «детерминистичных» алгоритмах: Калманы там всякие, sensor fusion, стратегии. На мой взгляд в ИИ все ломанулись от хайпа и «бедности», т.к.«классическая» система слишком дорого выходит.
Во-вторых, все эти направления уже разрабатываются, часто не первый год. Тот же контроль давления в шинах, по-моему, обязателен для всех новых машин в EU то ли уже, то ли с 2020. Системы эти нужны и полезны независимо от того, кто за рулем, человек или алгоритм.
В-третьих, мне кажется Вы делаете «ошибку выжившего». Наверное Вы сами классный водитель и живете в среде где водят или хорошо или никак, но из того, что я вижу вокруг, в этой самой EU, и статистике все далеко не так хорошо. Весьма посредственных водителей вокруг масса, езду на спущенных шинах или влетание в присыпанный свежим снежком на полной скорости поворот я вижу нередко. В «обучение за пару часов» верится тоже слабо, после автошколы я, например, водил очень так себе, нередко забывая достаточно базовые вещи. Многие не учатся, в силу разных причин, и за годы. И эта тенденция к длительному обучению человеков подтверждается постоянным увеличением минимума курсов автошкол, т.к. народ все бьется и бьется.
tuxi
По вполне понятным причинам. Городская среда в разных климатических поясах гораздо менее предсказуема, нежели чем крытые промышленные цеха и даже с/х поля с четко выраженной моделью перемещений в четко ограниченное время года.