

На Международной конференции по робототехнике и автоматизации исследователи из Массачусетского технологического института показали, как могут стыковаться плавающие роботы. В 2016 году грант на эти исследования выделил Амстердамский институт современных городских решений: планируется, что подобные роботы будут перевозить грузы и пассажиров по каналам столицы Нидерландов.
Амстердам знаменит не только кофешопами, но и живописными каналами, которые занимают четверть площади города. Проект Roboat предлагает разгрузить дорожный траффик и задействовать в каналах самоуправляемые платформы размером 2 на 4 метра:


Автономные платформы могут возить туристов по популярным маршрутам, доставлять грузы, формировать мосты или площадки, а по ночам перемещать контейнеры с мусором. Исследователи из MIT уже представили и протестировали уменьшенный в четыре раза прототип, а теперь показали, как роботы будут стыковаться.
Каждая платформа оснащена камерой, лидаром и gps-трекером. Для сближения используются визуальные маркеры Apriltag, которые позволяют начать наведение с расстояния 10-15 метров. Такие маркеры напоминают обычный QR-код и применяются, например, для посадки беспилотников на крыши автомобилей. Apriltag не требует дополнительного питания, поэтому их можно устанавливать на парковках для роботов или на мусорных контейнерах, которые нужно перемещать. В будущем разработчики планируют сделать маркеры изменяемыми, чтобы роботы могли обмениваться информацией и выбирать себе партнёра для манёвра.
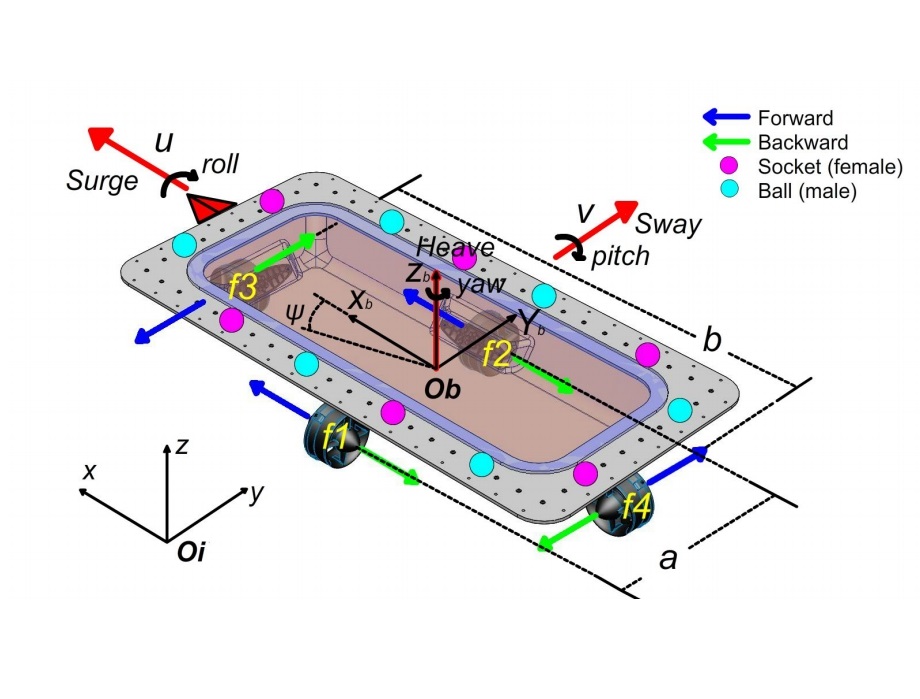
Для стыковки один робот останавливается, а второй начинает движение. При позиционировании используются две пары винтов, которые расположены по центру бортов. С их помощью робот может поворачиваться и двигаться в любую сторону. Когда между роботами остается одного метра, активный робот встает точно напротив второго и начинает сближение.
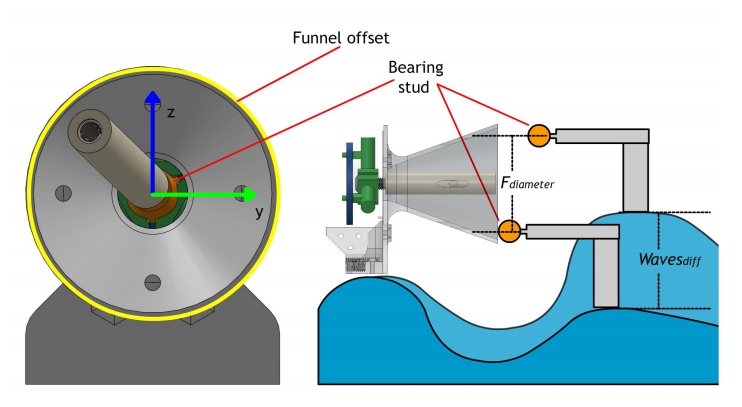
Стыковочный механизм представляет собой стержень со сферой, которую ловит и фиксирует воронка. Такая схема компенсирует до 10 см волн и благодаря ей для завершения манёрва нужно позиционирование в одной плоскости.
Исследователи проверили стыковку в бассейне и в открытой воде — в обоих случаях с расстояния 1 метр стыковка завершалась меньше чем за 10 секунд. Теперь они планируют улучшить механизм фиксации, научить стыковаться сразу несколько роботов и испытать полноразмерную модель. Планируется, что платформы Roboat появятся в каналах Амстердама уже в 2021 году.
Yuriy_krd
Все новое — это старое в новой оболочке… Схема вчистую «слизана» с космической стыковки, которой уже «сто лет». От маркеров (в космической отрасли используется мишень на пассивном аппарате, на активном — «прицел с перекрестием, которым (человеку или электронике) надо попасть в центр мишени), до механики стыковки (штырь с попаданием в воронку).
MotoDruG
Pand5461
А та, в свою очередь, слизана с системы дозаправки в воздухе типа "штанга-конус".
Всё равно в каждой среде есть специфики нагрузок на штанги и на конуса.
Yuriy_krd
Ради справедливости, не «штанга — конус», а «шланг-конус». Потому что «штанга» — это система, действующая иначе.
Pand5461
А, там принцип именования не такой, как в космических стыковках.
Я имел в виду — штанга на одном судне, конус (шланг с конусом) на другом, по аналогии с "штырь-конус" для космических стыковок.
Mumlum
Нет, ну с точки зрения «инженерное решение, адаптированное к новой окружающей среде» — вполне себе жизнеспособная разработка.
Но, конечно, не то чтобы ноу-хау. Это да.