

Мы уже рассказывали, что встреча людей и машин на производстве в основном заканчивается миром. Где-то эффективнее автоматизировать производственные задачи, но во многих сферах по-прежнему полезнее делать ставку на одушевлённый пролетариат, но в целом роботы и люди всё теснее сотрудничают на фабриках, работая буквально бок о бок. Возникает вопрос: как сделать так, чтобы машины случайно не навредили человеку? Рассказываем историю проблемы, в которой уже пролилась первая кровь, а также о технологиях, предотвращающих эти неприятные столкновения.
Ещё при жизни фантаста и футуролога Айзека Азимова, сформулировавшего три закона мирного сосуществования робота и человека, нашлась машина, которая их нарушила.
Кстати, если кто забыл, законы простые:
- Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
- Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому закону.
- Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому или Второму законам.
Чем меньше расстояние между людьми и роботами, тем больше риск несчастных случаев. Для обеспечения безопасности требуется тщательный менеджмент, включающмй разделение робота и рабочей зоны. Источник: Toshiba
25 января 1979 года в городе Флэт-Рок (шт. Мичиган, США) 25-летнему рабочему склада фабрики «Форд» Роберту Уильямсу поручили извлечь детали, хранившиеся на огромном стеллаже, который в то же время обслуживала пятиуровневая машина-манипулятор. Она была разработана компанией Litton Industries для перемещения болванок на складе. Часть машины представляла собой однотонные транспортные средства для перевозки — тележки на резиновых колесах, оснащенные механическими манипуляторами для перемещения болванок. Уильямса отправили сделать работу, с которой не справился робот — какие-то детали остались без внимания машины. Рабочий забрался на третий уровень стеллажа и начал выполнять задачу. Тем временем здесь же появилась одна из тележек, которая ударом манипулятора мгновенно убила рабочего, не заметившего её приближения. Тело Уильямса оставалось на полке полчаса, пока его не обнаружили рабочие. Робот буднично продолжал перемещать болванки. Родные рабочего отсудили 10 млн долларов ущерба, а Уильямс, сам об этом уже не узнав, вошёл в историю как первая жертва робота.
Символично, что смерть Уильямса случилась в годовщину премьеры пьесы Карела Чапека «Россумские универсальные роботы», которая состоялась в 1921 году. Именно это произведение дало нам понятие «робот», а также первое описание тотального уничтожения человечества восставшими машинами.
Впрочем, назвать смерть Роберта Уильямса убийством — это значит допустить большое преувеличение, ведь у фабричной машины не было главного «квалифицирующего признака» умышленного убийства — мотива. И даже в июле 2016 года, когда полицейский робот со взрывчаткой был использован для ликвидации преступника в Далласе (шт. Техас, США), действиями машины все ещё руководил человек.
Часто ли роботы наносят вред человеку?
Хотя все роботы за исключением военных проектируются так, чтобы ни одно из правил Азимова нарушено не было, полностью избежать жертв не удаётся. Много ли их? Статистику драматичных инцидентов с роботами нельзя назвать обширной, хотя травмы и даже убийства с участием машин происходят регулярно.
Согласно исследованию, проведённому Управлением по безопасности и гигиене труда США (Occupational Safety and Health Administration — OSHA), промышленные роботы стали причиной не менее 33 случаев смерти и травм на рабочем месте в этой стране за 30 лет. Однако есть и более мрачные данные. В 2013 году германские страховые компании подсчитали, что каждый год в ФРГ происходит порядка 100 инцидентов с промышленными роботами.
В более раннем исследовании 1987 года, охватившем предприятия из США, ФРГ, Швеции и Японии, установлено, как именно роботы вредили рабочим: в 56% случаев они наносили проникающие ранения, в 44% — удары. Большинство несчастных случаев были вызваны плохой организацией рабочего места (20 из 32 проанализированных инцидентов), а человеческие ошибки спровоцировали только 13 неприятных ситуаций.
Есть статистические данные о неудачном использовании роботов в отдельных сферах их применения. К примеру, как принято говорить у медиков, «своё кладбище открыли» медицинские коботы: в 2013 году команда учёных проанализировала статистику Управления по санитарному надзору за качеством пищевых продуктов и медикаментов США (US Food and Drug Administration, FDA) и обнаружила, что с 2000 по 2013 год во время хирургических операций, которым ассистировали роботы, произошли 144 смерти, 1 391 травма и 8 тыс. неисправностей устройств. Среди них две смерти и 52 ранения были вызваны самопроизвольным отключением робота во время операции или совершения им неправильного движения. Одна смерть и 119 травм произошли из-за того, что элементы робота или удерживаемой им оснастки падали на пациента.
Роботы в хирургии применяются там, где точности рук и взгляда даже самого опытного хирурга недостаточно — от операций на позвоночнике до пересадки волос. Источник: YouTube-канал IEEE Spectrum
Почему роботы стали опаснее?
Основная и почти философская проблема: роботы не осознают себя частью мира, и соответственно, могут быть опасны для окружающих. Однако если 20-40 лет назад робот был электромеханической машиной с очень ограниченным кругом повторяющихся задач, и его можно было буквально «держать в клетке», то есть ограничить к нему доступ, чтобы он случайно никому не навредил, то сегодня ситуация меняется. Чтобы роботы заменили отдельных работников либо дополнили их возможности своими, машины приходится выпускать из клеток. За одним конвейером могут трудиться одновременно два сортировщика — живой и механический. Более того, роботы становятся многозадачными, для чего им нужно передвигаться по цеху.
Соответственно, образуется единое рабочее пространство человека и машины, в котором может случиться всякое.
Промышленные роботы представляют несколько типов угроз в зависимости от их происхождения:
- механические опасности, которые возникают в результате непреднамеренных и неожиданных движений или потери роботом инструментов;
- опасность поражения электрическим током, например, контакты с токоведущими частями или соединениями;
- тепловые опасности, такие как связанные с горячими поверхностями или воздействием экстремальных температур;
- шум, способный навредить органам слуха.
Что же провоцирует эти угрозы? По наблюдениям специалистов OSHA, многие инциденты с участием роботов происходят не в нормальных условиях эксплуатации, а при внештатных ситуациях, к примеру, во время перепрограммирования, техобслуживания, ремонта, тестирования, настройки или регулировки. Далее следуют внешние факторы, не зависящие от человека, — природные или технические, скажем, сбой электропитания.
Всего принято выделять семь основных причин выхода роботов из-под контроля:
- ошибки управления, то есть ошибки в системе управления или программном обеспечении, что приводит к нестабильному поведению или увеличению опасного энергетического потенциала машины;
- несанкционированный доступ — нарушение неподготовленным специалистом охранной зоны рядом с машиной;
- механические неисправности — наиболее непредсказуемые и опасные сбои, которые могут привести к неправильной или неожиданной работе робота;
- природные факторы — в этой группе причин всё то, что может повлиять на поведение робота в силу природных причин, в частности, электромагнитные или радиочастотные помехи, а также неблагоприятные погодные условия;
- сбой системы питания — например, пневматические, гидравлические или электрические приводы могут нарушать электрические сигналы в линиях управления; результат — выброс энергии, поражение электрическим током, увеличение риска пожара, особенно когда что-то искрит в роботах, использующих горючее гидравлическое масло;
- неправильная инсталляция робота или его элементов провоцирует массу аварийных ситуаций, в том числе и при попытках исправить ошибки;
- человеческий фактор: ошибки программирования, сопряжения, управления, нарушение техники безопасности.
В январе 2019 года промобот одного из ТЦ в Лас-Вегасе заблудился в районе парковки и был сбит Tesla Model S. Хотя промобот находился в неположенном месте, виноватым оказался водитель машины, отключивший автопилот. Источник: YouTube-канал Promobot
Чаще всего нештатные ситуации возникают либо при вмешательстве в работу робота человека, либо из-за изменений окружающей среды, на которую механический рабочий отреагировать не может. Какие технологии позволяют это предотвратить?
Какие технологии обеспечивают безопасность роботов?
Безопасным сотрудником робота делают три ключевых навыка: 1) контролируемая остановка, 2) контроль скорости и разделения зон, 3) ограничении мощности и силы. Разъясним эти понятия.
Контролируемая остановка (Safety-rated Monitored Stop, SMS)
Контролируемая остановка робота происходит, как только человек оказывается в определённой зоне поблизости от машины, скажем, для замены оснастки, регулировки, настройки или других действий непосредственно с роботом. При этом продолжается подача питания, а робот автоматически переходит в режим бездействия. Как только оператор покидает зону контроля, робот возобновляет рабочие операции без дополнительных команд.
Для измерения расстояние от робота до человека (или другой помехи) используются сенсоры удалённости разных типов (оптические, звуковые и др.), которые определяют расстояние до объекта, посылая сигнал и получая отклик. Чтобы обеспечить максимальную безопасность датчики имеют две параллельные системы передачи и обработки сигналов о появлении в заданной зоны помехи. Сигналы поступают в два разных модуля в контроллере робота и обрабатываются отдельно, причём разными алгоритмами. Затем они проходят перекрёстную проверку.
Соответственно, если один из каналов по какой-либо причине откажет, робот всё равно остановится.
Так работает контролируемая остановка манипулятора. Магистр Университета Антверпена использовал для создания этой системы Kinect v2 от Microsoft. Источник: Nick van Oosterwyck / YouTube
Контроль скорости и разделения зон (Speed and Separation Monitoring, SSM)
Эта более сложная технология безопасности предусматривает изменение поведения робота при нахождении человека в определённой зоне рядом с машиной — например, замедление работы робота.
Технически это происходит так: машина непрерывно измеряет положение и скорость перемещения объекта в зоне видимости. SSM может быть реализована как в статических, так и в динамических условиях. Ключевой при этом является технология распознавания окружающих объектов. В частности, для SSM применима технология распознавания объектов Toshiba. Изначально мы разрабатывали её для решения задач складскими роботами, которые должны были научиться обращаться с посылками, в том числе разных размера, цвета, веса и формы. Если робот должен видеть, что он захватывает, то почему бы ему не научиться распознавать коллег, в том числе людей? Технологию распознавания Toshiba основана на использовании двух камер RGB-камеры и 3D-камеры. Объединяя полученные ими картинки, робот может определять положение объекта в пространстве и направление его движения.
Ограничение мощности и силы (Power- and Force-Limited, PFL)
Это одна из наиболее часто применяемых технологий, которая позволяет избежать вреда человека при контакте человека и машины. Она предполагает использование разных техник, в том числе и сенсоров силомоментного очувствления. Он преобразуют измеряемые компоненты векторов сил и моментов в сигналы, пригодные для обработки роботом, который «прикасается» к тем или иным предметам. К примеру, такие датчики установлены на кронштейнах роботов Toshiba, которые занимаются сортировкой разного типа посылок, в том числе и хрупких. Прежде чем взять посылку робот «ощупывает» её и датчик определяет, с каким объектом по форме, упругости, размерам имеет дело машина. Исходя из полученных данных, робот выбирает силу зажима и скорость обращения с объектом.
Какие технологии сделают робота безопаснее в будущем?
Промышленные роботы в будущем в отличие от своих предшественников, которые были способны лишь к ритмичному повторению ограниченного круга задач, будут взаимодействовать с меняющейся средой и человеком. Чтобы робот мог это делать и выполнять нетипичные задачи, он в той или иной мере должен освоить основные навыки человека, в частности — умение слушать.
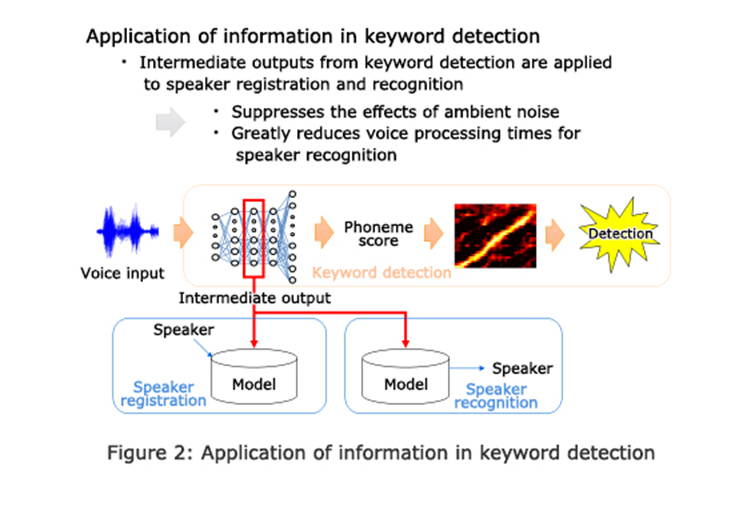
Совсем недавно Toshiba представила новую технологию распознания речи, основанную на искусственном интеллекте. Это первая в мире разработка такого рода: любой робот или простое электронное устройство сможет обрабатывать голосовые команды без подключения к интернету и облачным данным. Иными словами, обрабатывающее устройство встраивается в машину.
Сначала нейронная сеть обрабатывает звук, отделяя голосовые команды от посторонних шумов. Далее используется методика расширения данных в нейронной сети. Расширение данных — это метод изучения небольших объемов информации, в данном случае — устных высказываний.
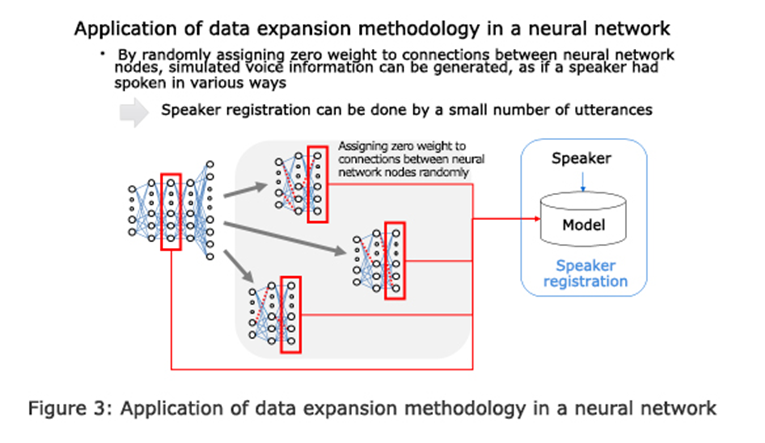
Путём случайного присвоения нулевого веса соединениям между узлами нейронной сети можно генерировать смоделированную речевую информацию, как если бы говорящий говорил по-разному. Успешная идентификация людей происходит благодаря обучения ИИ на основе образцов их речи, что позволяет распознавать конкретных говорящих, даже когда доступно лишь небольшое количество высказываний. Источник: Toshiba
Toshiba сократила количество требуемых образцов речи до такой степени, что новая технология может распознать пользователя всего по трём высказываниям. Такая технология отлично подойдёт для роботов и коботов, с которыми не нужно быть многословными. Во всяком случае, пока.
Искусственный интеллект будет помогать в будущем роботам не только лучше слышать, но и видеть, думать и перемещаться, что со временем полностью устранит преграды между рабочими-людьми и их искусственными коллегами.

semennikov
Для российских роботов первоочердно — распознавание многоэтажного мата как команду немедленной остановки :-))