
Концепция
Бывало ли у Вас такое, что выйдя из дома Вы не помните выключили ли утюг? Обсуждая с другом очередной такой случай, появилась шуточная идея сделать робота для дистанционной визуальной проверки домашних дел. Да и вообще хотелось, на коленке сделать “шпионского” робота управляемого по камере со смартфона. Эта идея вынашивалась нами давно, но руки дошли только сейчас. И мы сразу же отправились в ближайший бар для обсуждений. Собственно роботом это называть не совсем верно. Скорее это самоходная платформа с телеметрическим управлением через сеть Интернет. Но в статье будет использоваться термин “робот” просто потому что так привычней.
Технология WebRTC идеально нам подошла, так как довольно легко организовать передачу видео, аудио и data каналов между двумя peer’ами с минимальной задержкой сигнала. Да и опыта работы с этой технологией у нас не было, потому очень хотелось попробовать.
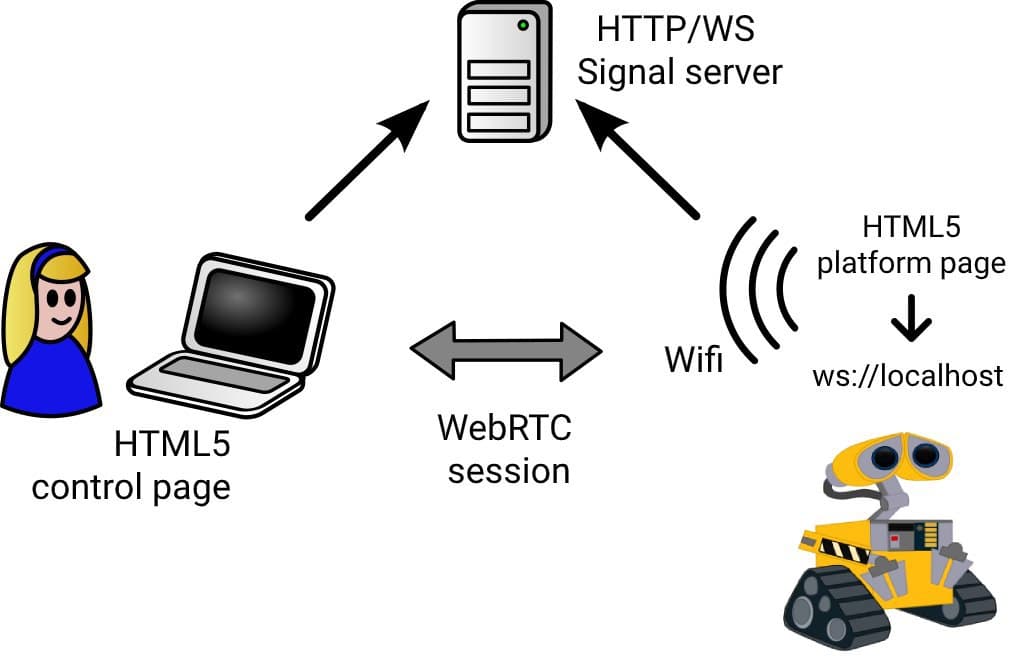
Упрощенная схема всей системы приведена на рисунке. Пользователь - оператор и робот - Raspberry PI заходят каждый на свою веб-страницу, подключаются к сигнальному серверу, после чего между ними создается WebRTC сессия через которую и передается видео-поток с робота пользователю, и передаются управляющие сигналы роботу. Дальше, управляющие сигналы робот отправляет на свой localhost где уже другой сервис их обрабатывает и выводит на GPIO, для управления моторами. Кажется все просто. Вот что у нас получилось на данном этапе:
Далее разберемся со всем этим более детально.
Комплектующие
Насмотревшись фильмов про роботов, многим из нас не раз хотелось построить своего боевого товарища. Но строить двуного терминатора сложно и дорого, благо наши китайские друзья делятся с нами не только вирусами. Проект задумывался как домашний, потому при выборе комплектующих мы исходили из того что у нас уже было или возможности приобрести по минимальной цене.
Главный контроллер

Так как у нас было две платы Raspberry Pi (3b и 4), и они нас вполне устраивали, то было решено использовать именно малинку со стандартной OS Raspbian. Применение данной платы дает возможность усовершенствования в будущем, использования OpenCV, подключение дополнительной периферии и т.д. И она достаточно распространенная чтобы можно было без проблем купить дешевый корпус и не боятся запачкать его в клей, или просверлить парочку монтажных отверстий.
Глаз (камера)
В качестве камеры можно в общем-то использовать любую вебку (что мы первое время и делали), но в процессе тестирования оказалось что лучше брать камеру с относительно высоким показателем FPS и светочувствительности. Потому практически сразу после первых тестов заменили старую вебку Logitech QuickCam Connect на относительно современную Logitech C270 приобретенную на доске бесплатных объявлений за 12$. Можно было использовать и Raspicam, но это обошлось бы несколько дороже.
Механика

Механическая основа робота — гусеничная платформа с дифференциальным приводом — классическая, в общем-то, для простых робототехнических экспериментов. Два независимых колеса вращающих гусеницы. Данное решение оказалось несколько ошибочным, так как такие конструкции не лишены следующих недостатков:
Часто слетают гусеницы при повороте на поверхностях с высоким коэффициентом трения, например на ковре.
Очень шумные редукторы на моторах
Идеальным решением была бы обычная платформа на колесах, управляемая по танковой схеме. Но гусеницы выглядят интересней.
Питание

Для исключения возникновения помех и просадок напряжения цепи питания моторов и Raspberry Pi было решено разделить. Изначально драйвер моторов был запитан от телефонного аккумулятора на 3.7В с импульсным повышающим преобразователем напряжения типа DC-DC MT3608, но драйвер моторов не захотел с ним адекватно работать, и уходил в “зашкал”. Вероятно из-за импульсного характера напряжения. Потому было куплено два одинаковых аккумулятора от старого телефона Samsung. И они идеально вписались в батарейный отсек, будучи соединенными конструктивно скотчем и последовательно электрически. А малинка запитана от power-банка Xiaomi с быстрой зарядкой, так-же идеально подходящей под габариты платформы. Величины тока вполне хватает для питания Raspbery Pi4.
Драйвер моторов
Изначально был выбран драйвер L9110, но он часто выключался при питании от повышающего DC-DC преобразователя, потому код был исправлен и установлен L293N. Проблему это не решило, а модуль так и остался. Принципиальной разницы в работе модулей замечено не было.
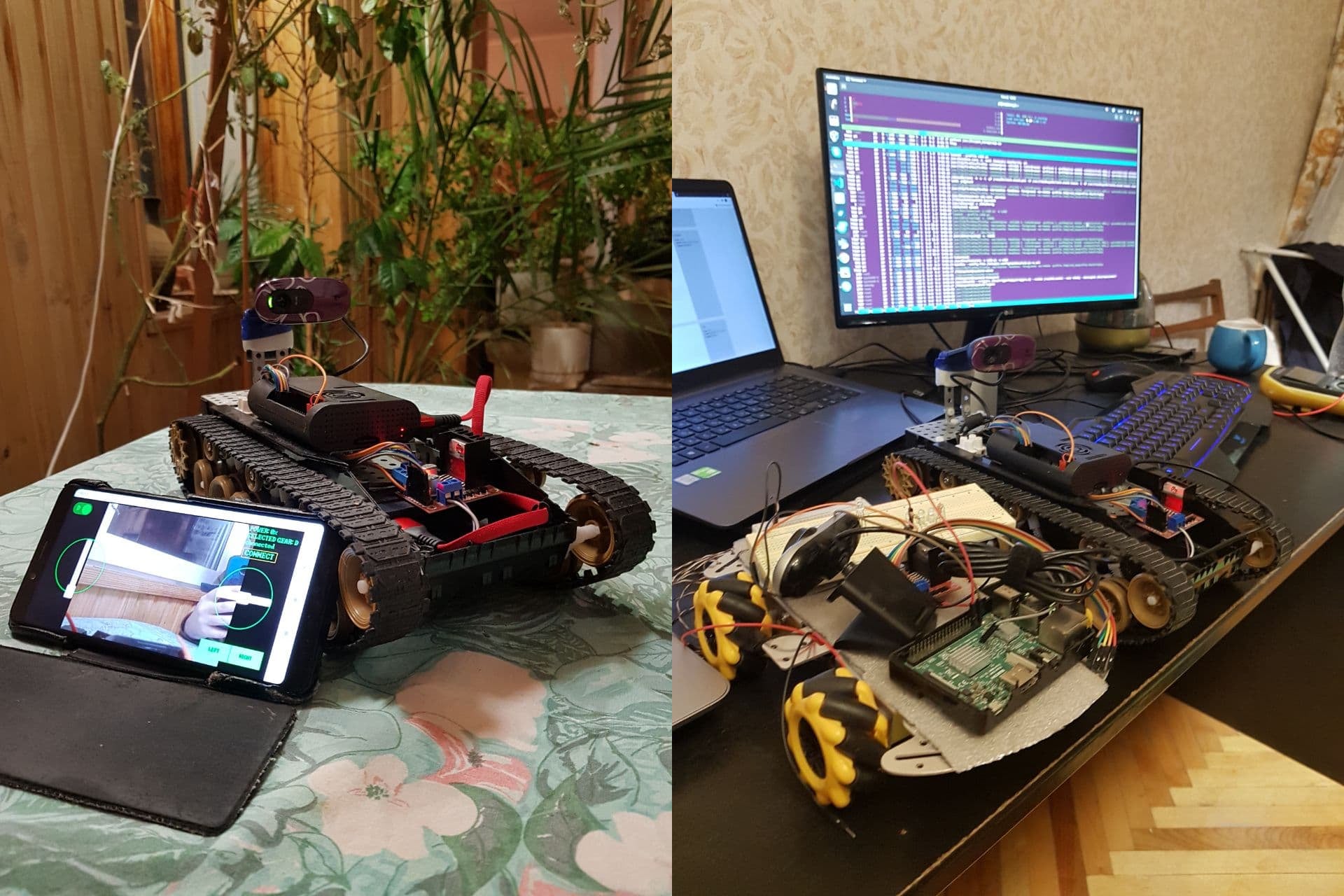
Конструкционный монтаж

Так как это лишь домашний прототип, то собирается все из "полиморфа", палок и супер-клея. Очень удобно было использовать советский металлический конструктор “Малыш” приобретенный на доске бесплатных объявлений за 1$. Power-банк на самом дне, для сохранения низкого центра тяжести. Прижат пластиной из конструктора, на которую пластиковыми болтами закреплены две скобы к которым уже и крепится корпус Raspberry Pi. Камера прикручена в задней части по причине того что так комфортнее управление. Проще понимать габариты когда видишь края гусениц, а объектив на камере не широкоформатный. Чудесным образом размер пластины из конструктора совпал с габаритным размером задней части платформы, что дало возможность спрятать под пластину скрученный длинный провод. Мелкие детали крепятся на супер-клей. А драйвер моторов - на двухсторонний скотч прямо к power-банку.
Программная часть
Так как это прототип, то качество кода, да и всего проекта в целом соответственное. Есть некритические ошибки. Реализован проект на языках JavaScript и Python. Репозитории проекта с комментированным кодом доступен по ссылке. Весь код тут приводить не буду, постараюсь описать только основные моменты.
Сигнальный сервер
Представлен примитивным NodeJS сервером. Он выполняет две функции:
Отдает нужные страницы для платформы и на устройство оператора, который управляет роботом.
Собственно сигнальная функция, т.е. обслуживает подключения по веб-сокету.
При подключении к серверу платформа “регистрируется” под под своим уникальным идентификатором. Этот самый идентификатор должен ввести у себя в интерфейсе оператор. И сообщения отправляемые со страницы оператора доставляются на страницу платформы и наоборот. Таким образом реализована абстракция типа комнаты, для возможности одновременного функционирования нескольких платформ. С кодом сигнального сервера можно ознакомится по ссылке.
Для общения с сигнальным сервером из клиентской части реализован класс SignalEmitter. Принимает в конструктор объект с настройками. id - идентификатор платформы , isControl - переменная указывающая на то платформа это или оператор. signalServer - uri сигнального сервера. Развернут он у нас на старом десятилетнем ноутбуке.
const se = new SignalEmitter({
id: searchParams.get('id'),
isControl: false,
signalServer: config.signalServer
});WebRTC
Для соединения по протоколу был реализован класс RTC. В конструктор принимает два параметра - объект настроек options и экземпляр класса SignalEmitter, который был описан выше. isControl - переменная указывающая на то платформа это или страница оператора. platformSocket - uri localhost'а с портом на который отправляется управляющий сигнал для гусениц.
const webrtc = new RTC({
isControl: false,
platformSocket: config.platformSocket},
se);Интерфейс клиентской части
Для прототипирования интерфейса использовался Vue.js, так как достаточно простой и позволяет быстро реализовать идею. Все что касается интерфейса находится в директории /public. Как выглядит прототип интерфейса и его функционал опубликовал в видео:
Selenium
Чтобы не запускать вручную каждый раз браузер, мы решили использовать Selenium WebDriver + geckodriver в headless режиме. Код императивный и очень простой, находится в файле robot-signal-server/selenium/index.js. Здесь мы подключаем конфигурационный файл, устанавливаем нужные флаги браузеру и открываем соответствующую страницу. О назначении каждого с флагов можно догадаться интуитивно, ну или же воспользоваться поисковиком. Можно добавить выполнение скрипта в /etc/network/if-up.d/ что бы он запускался автоматически при подключении к сети.
Управление драйвером двигателей
Эта часть написана на Python. Ее функция - принять управляющий сигнал по websocket со страницы платформы, преобразовать сигнал и вывести соответствующие значения на выводы GPIO. Так как схема управления у нас танковая, то контракт сигнала у нас такой: [0…+-1, 0…+-1] в формате JSON. Т.е. два значения, для левой и правой гусеницы, которые изменяются в пределах от -1 до +1 с шагом 0.01. Что соответствует движению назад и вперед, и дает возможность весьма точно регулировать скорость движения с помощью широтно-импульсной модуляции. (см. GItHub репозиторий)
Вывод
Как видно, сложного ничего нет. Применение данной схемы в production-варианте реализации возможно и для роботов-промоутеров или для мобильной, самоходной системы слежения да и вообще ограничивается только фантазией. Посещение музеев и выставок так же можно было бы сделать дистанционным, что особенно полезно во времена пандемии. Сидите Вы у себя в кресле и изучаете Собор Святого Петра в Риме или музей Васа в Стокгольме.
А повсеместное распространение скоростного 3/4/5G дает возможность использовать интернет вместо традиционного радиоканала в управлении БпЛА типа различных коптеров из современными полетными контроллерами со стабилизацией и прочими плюшками, ограничивая радиус действия только покрытием сети и возможностями аккумулятора. И еще видео:




barbos6
Любопытно, какая задержка видео в результате получилась.
djarik Автор
70-90мс если через 3g. Но по факту вообще не заметно, в режиме использования. Ощущается как real-time