

1. Материалы, трубы, инструменты
Если у вас есть проект блока программного управления, загляните на сайт JLCPCB, чтобы получить скидки и купоны:
Прототип блока программного управления JLCPCB всего за 2 доллара.
Получите купон на 24 доллара при регистрации здесь.
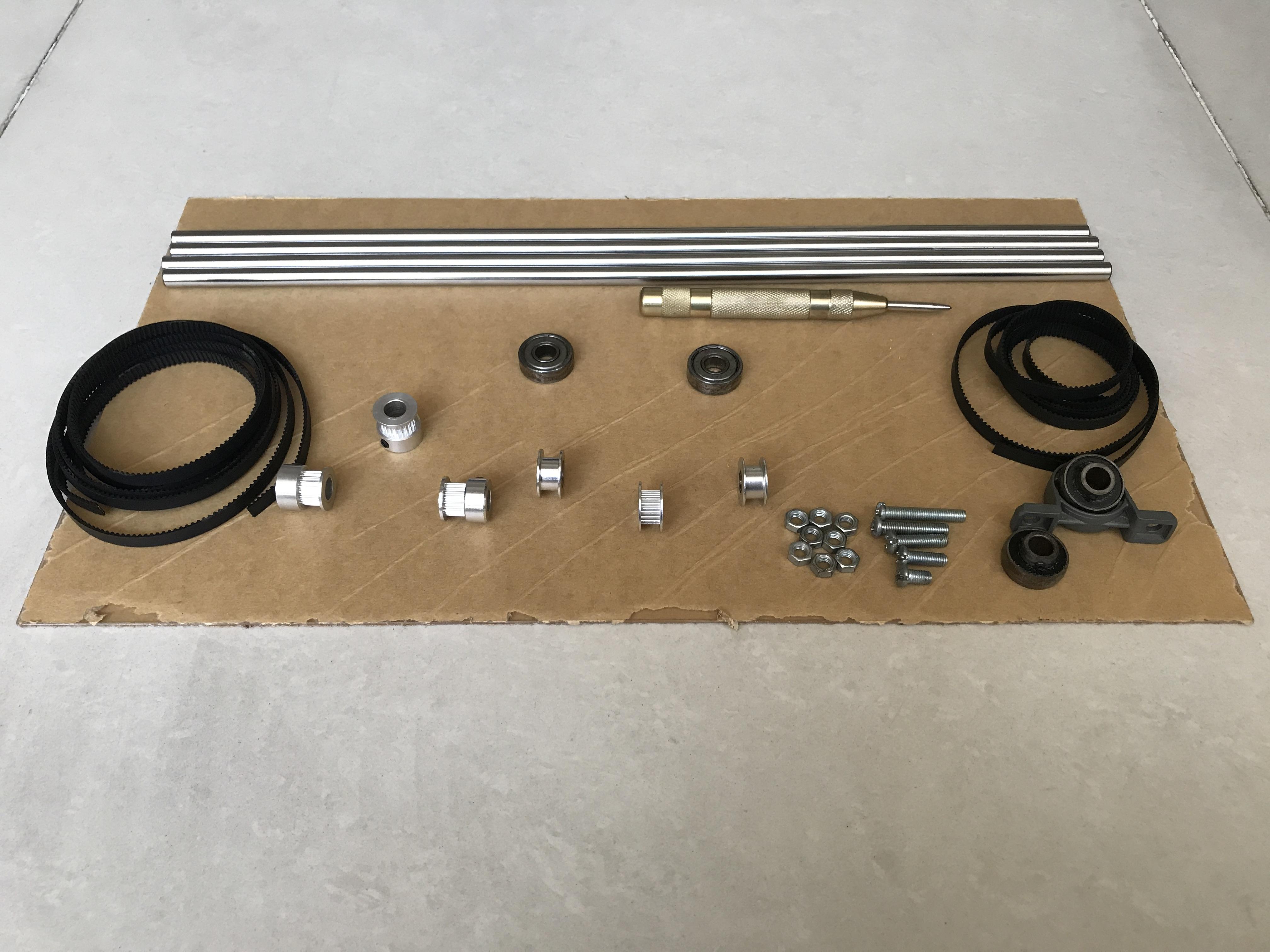
Основные материалы
Плата Arduino UNO версии R3 или Combo Arduino + CNCShield + A4988 (1 шт.).
Плата расширения Arduino CNC Shield V3 GRBL (1 шт.).
Привод шагового двигателя A4988 (3 шт.).
Шаговый двигатель NEMA 17 (3 шт.).
Ремень привода GT2 6 мм (4 м).
Алюминиевый беззубый натяжной шкив GT2 с отверстием 5 мм для ремня привода шириной 6 мм (4 шт.).
Фланцевые шариковые подшипники с защитной шайбой 8 x 22 x 7 мм (12 шт.).
Горизонтальный кронштейн шарикоподшипника или вертикальный кронштейн шарикоподшипника (12 шт.).
Прозрачный/белый плексиглас, размер A3, толщина не менее 5 мм (2 шт.).
Медно-латунные стойки длиной 10 мм (4 шт.).
Штепсельная вилка гнездовая постоянного тока 5 мм (1 шт.).
Несколько небольших кабельных стяжек, спиральная оплётка для кабеля, болты и гайки.
Трубы и фитинги из ПВХ
Тройник ПВХ Ø21 мм (70 шт.).
Т-образная трубка ПВХ Ø21 мм (16 шт.).
Т-образный патрубок с боковым отводом ПВХ Ø21 мм (16 шт.).
Крестовина ПВХ Ø21 мм (4 шт.).
Отвод ПВХ Ø21 мм (8 шт.).
Соединительная вставка ПВХ Ø21 мм (4 шт.).
Труба ПВХ Ø21 мм (8 м).
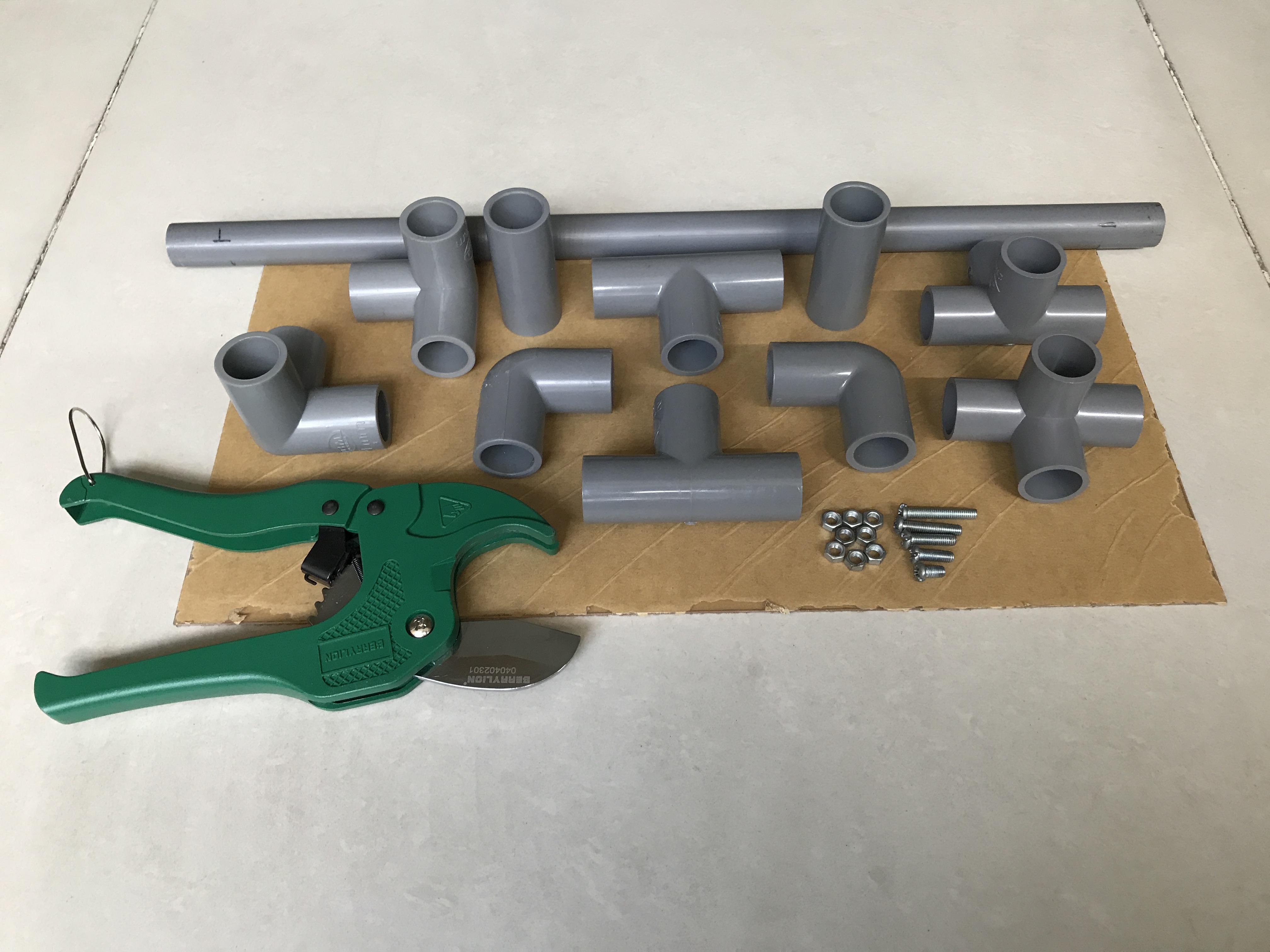
Инструменты
Дрель.
Ножовка.
Труборез для труб ПВХ очень полезен в этом проекте: резать нужно много.
Паяльник.
2. Как это работает
Плоттер работает на CoreXY, — встроенном ПО плоттера для другого измерения CoreXZ. В GRBL плоттера используется встроенная кинематика CoreXY с рабочей зоной около X — 380, Y — 380 и Z — 6 мм.
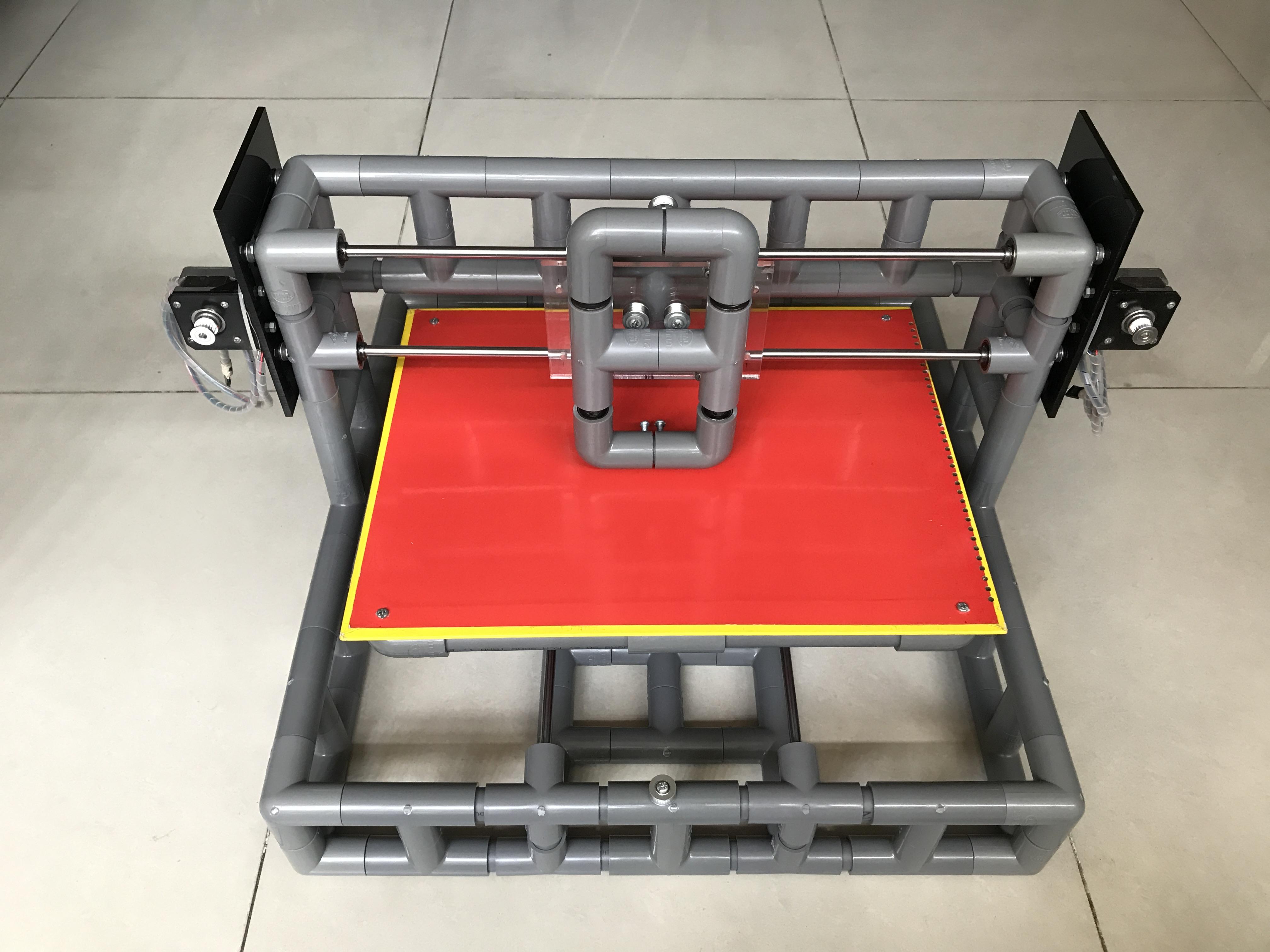
Вот её структура:
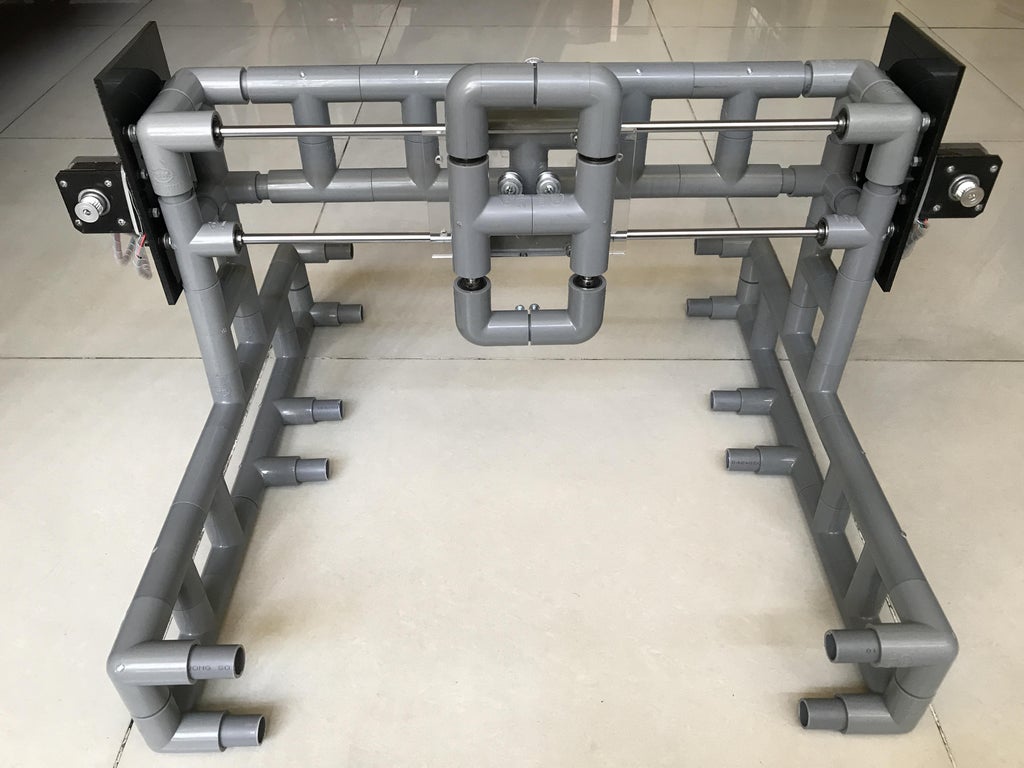
Оси X и Z приводятся в движение двумя шаговыми двигателями и общим ремнём привода (система CoreXY). К оси Z крепится труба из ПВХ, внутри которой располагается перо для рисования:
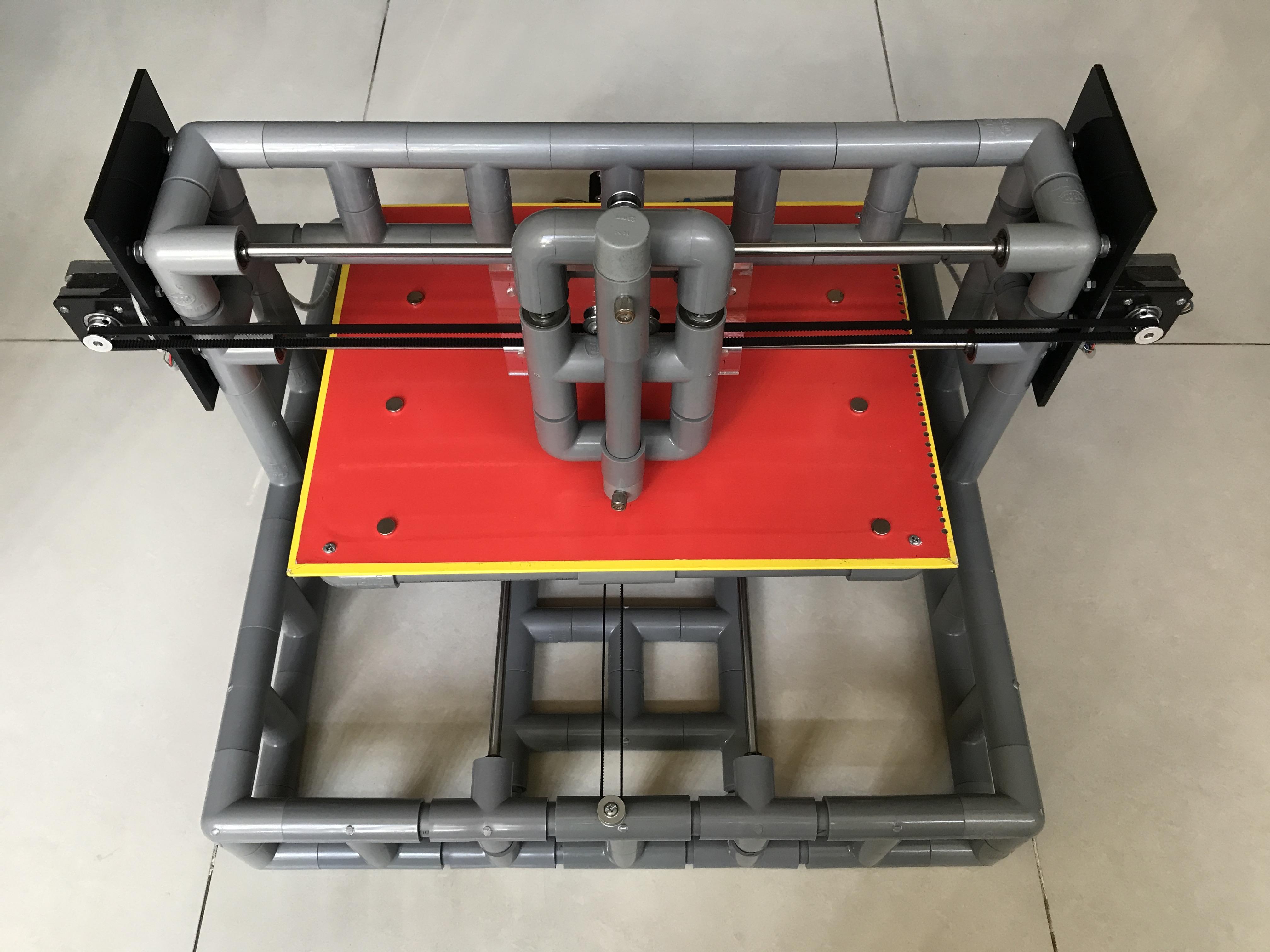
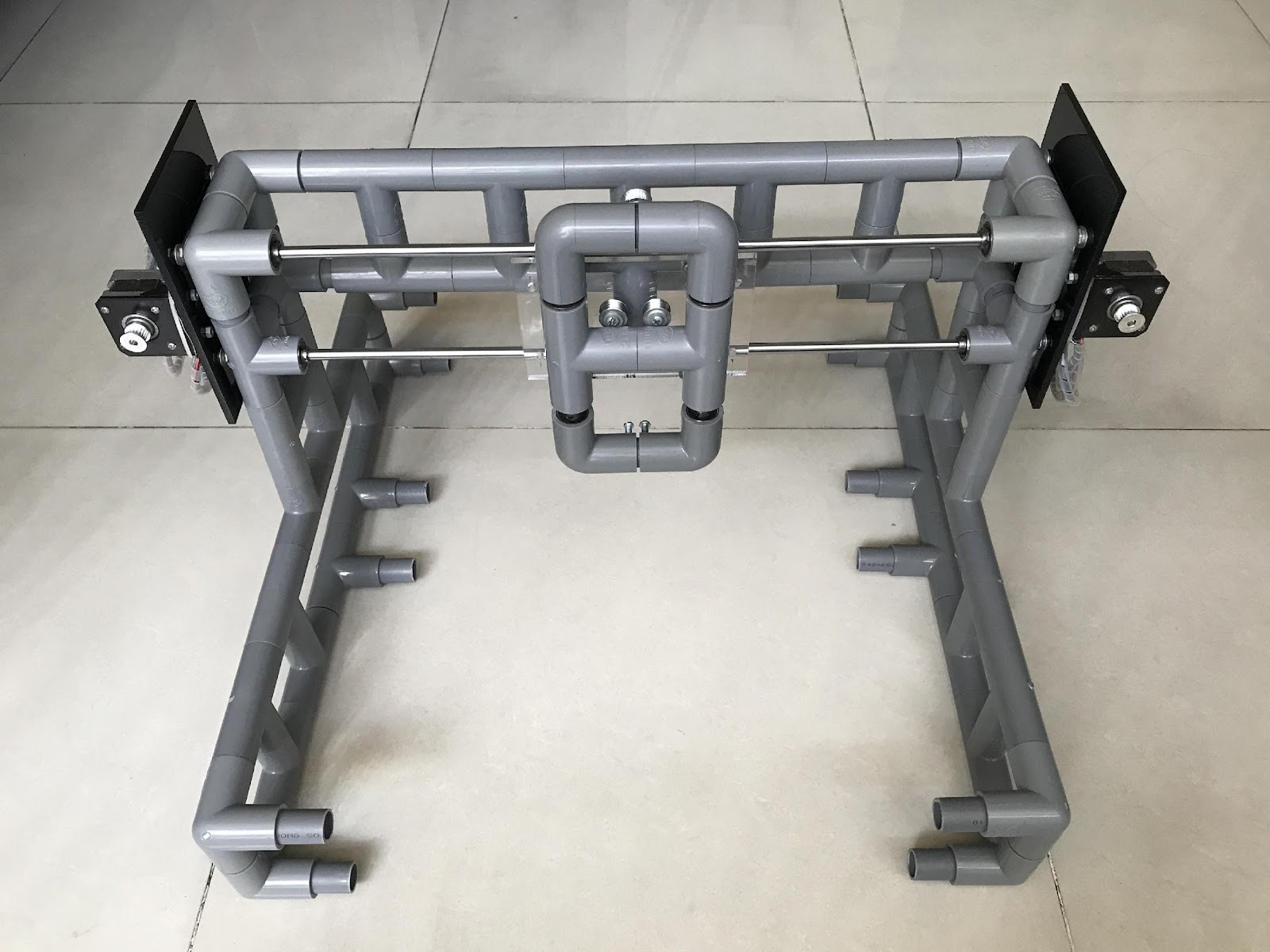
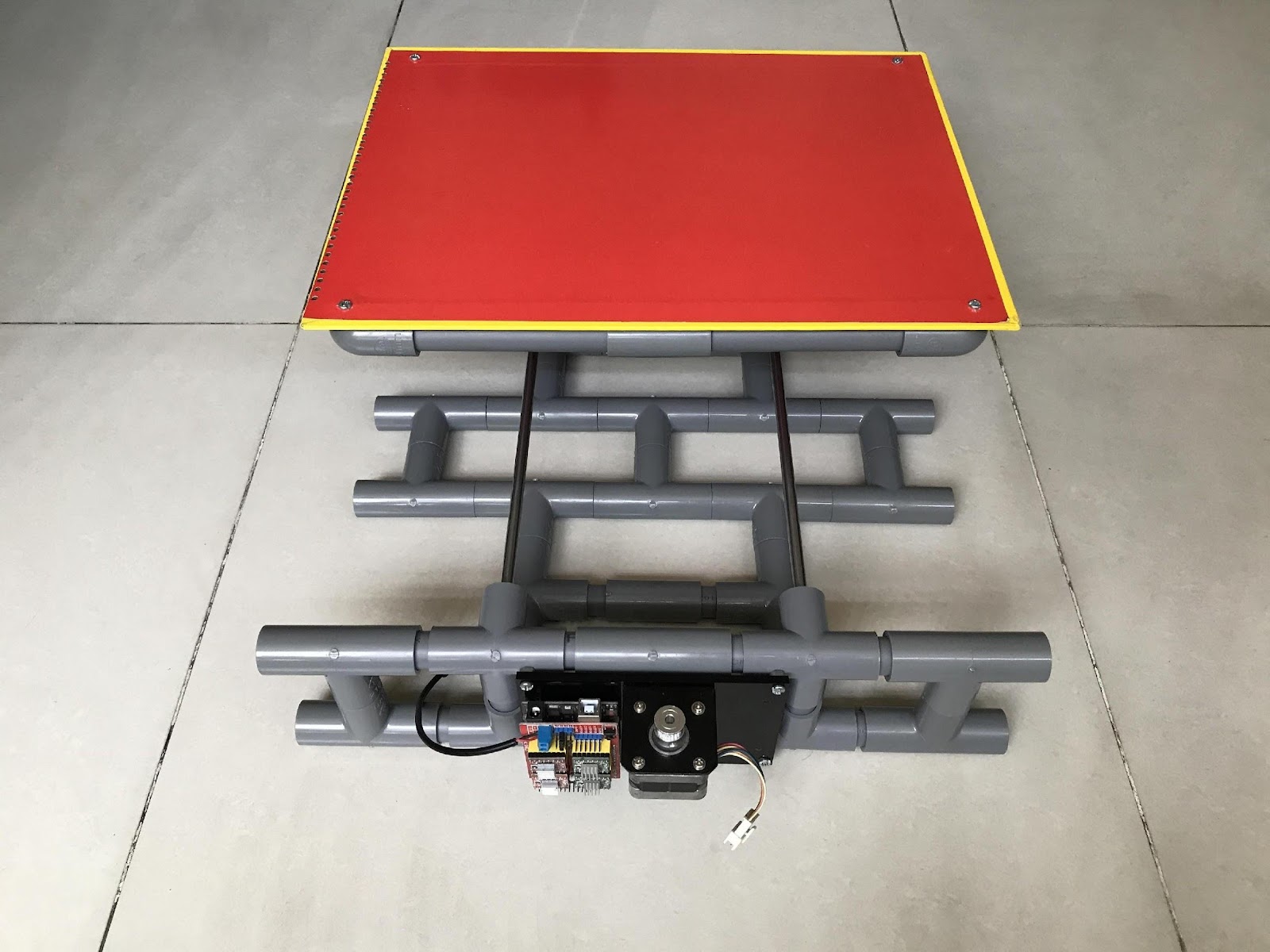
Ось Y работает, как в других традиционных ЧПУ, — с помощью ремня привода. Рама плоттера с ЧПУ делается из фитингов ПВХ. Ниже вы видите обратную сторону плоттера:

3. Сборка XZ
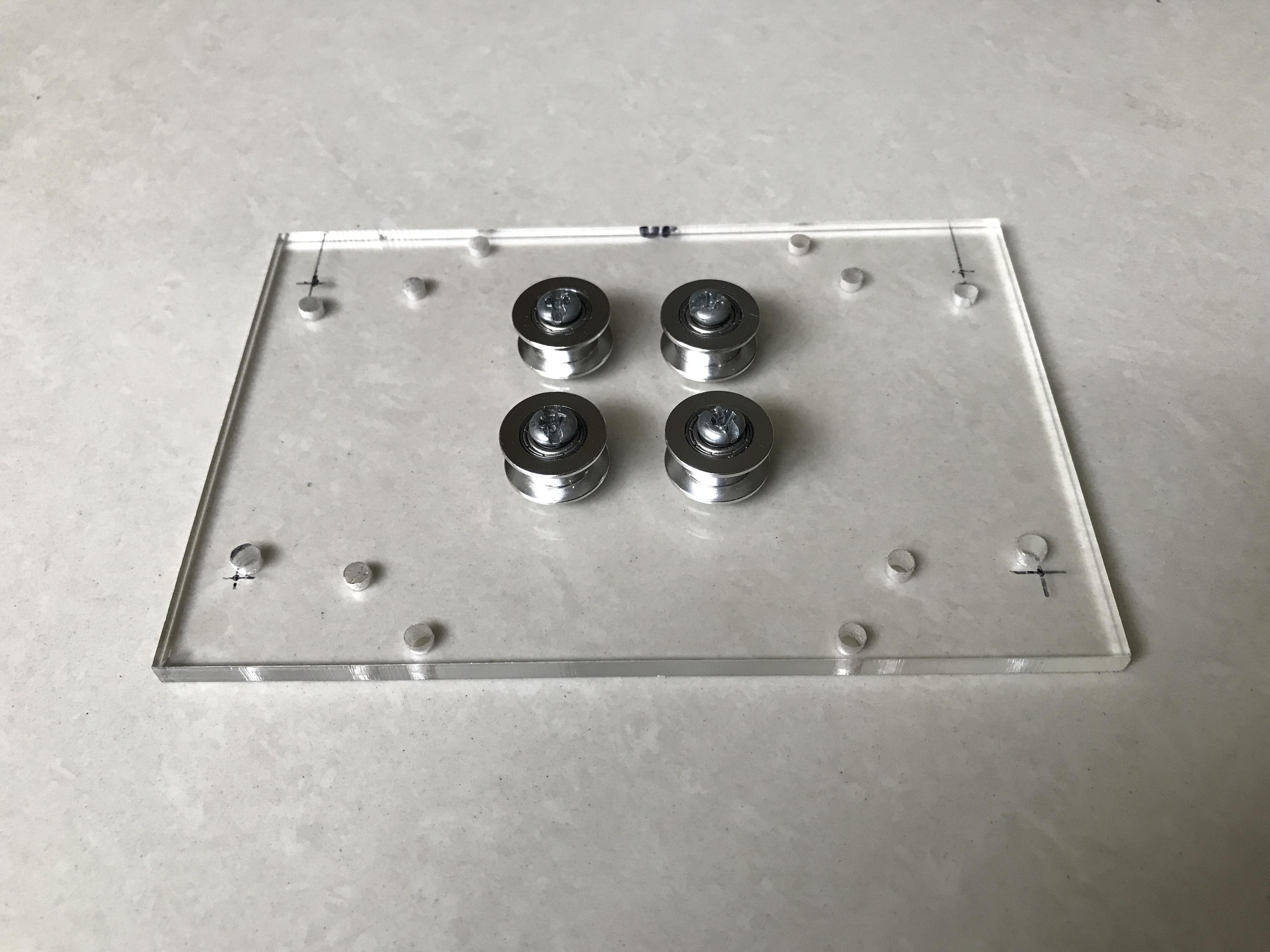
Вырезаем два листа плексигласа (180 x 120 x 5 мм), затем для крепления шаговых двигателей просверливаются отверстия:
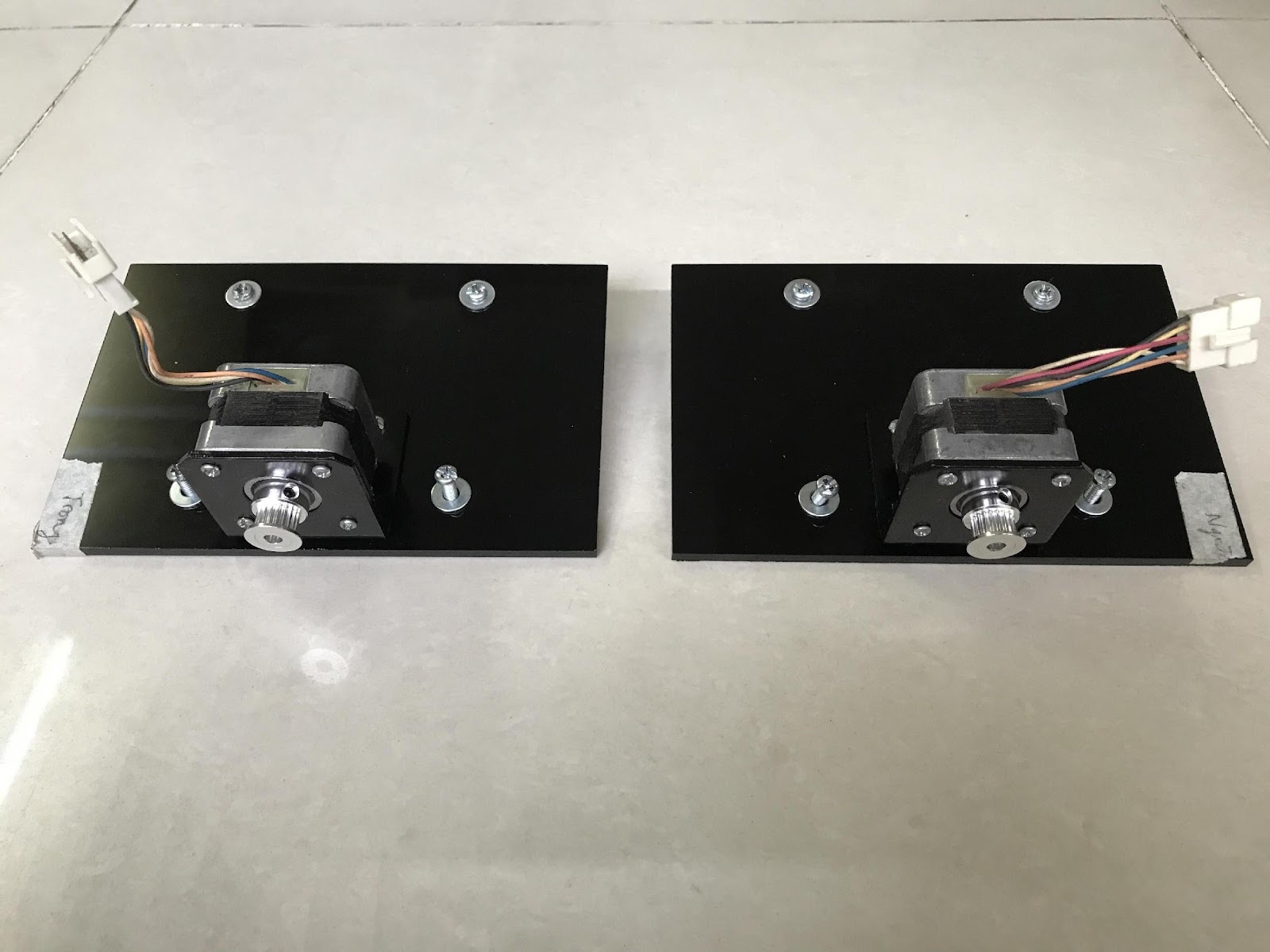
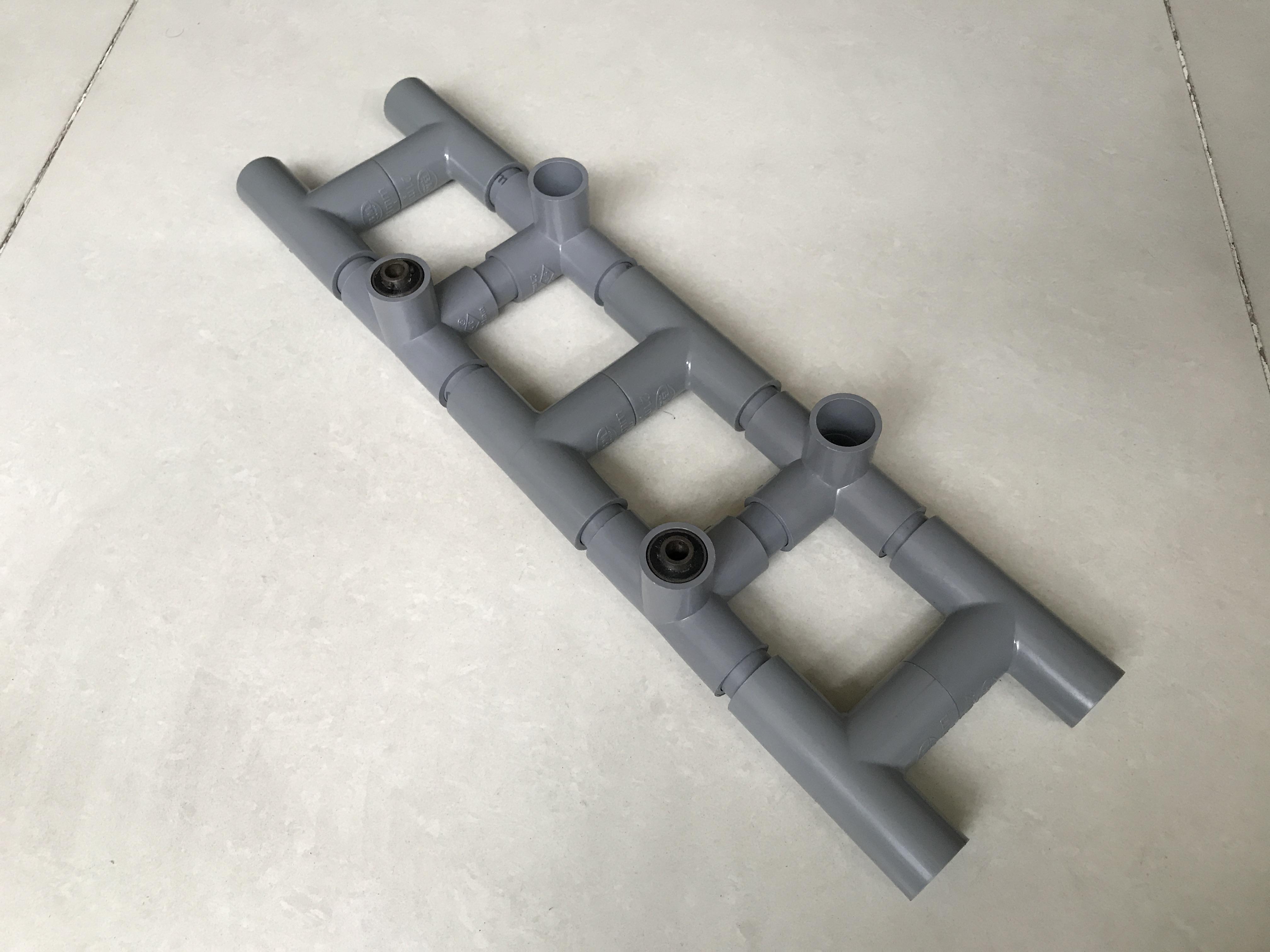
Две опоры XZ собираются с помощью тройников, Т-образных трубок и патрубков с боковым отводом ПВХ в форму, показанную на рисунке ниже. Затем к этим опорам крепятся шаговые двигатели с листом плексигласа. Также в два отверстия вставляются два стопорных подшипника:

Собирается ещё одна опора, чтобы оси XZ были достаточно устойчивыми:

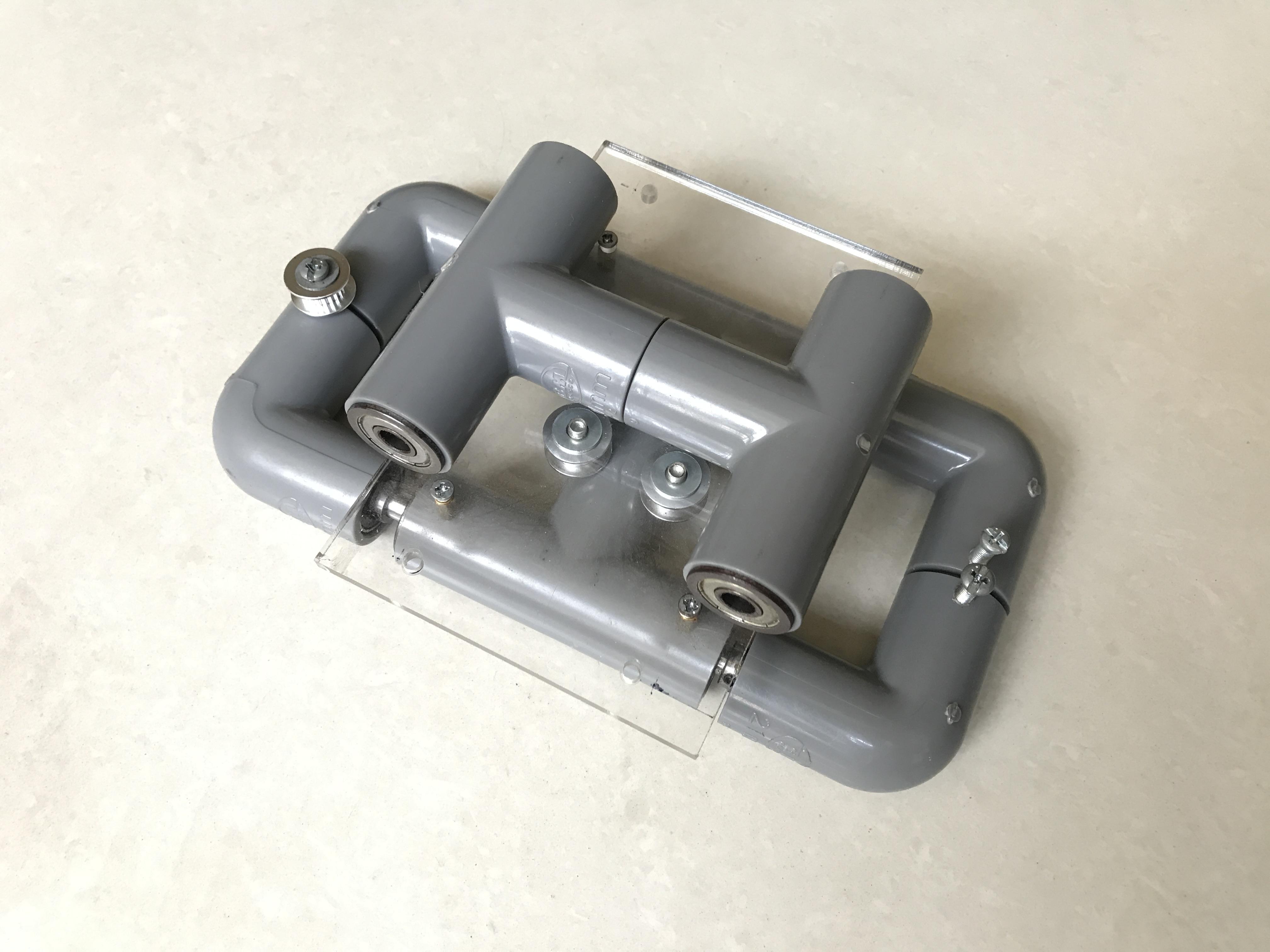
Ползунки X и Z делаются из двух тройников ПВХ с шарикоподшипниками на 4 концах этих ползунков:

Просверливается лист плексигласа размером 120 x 120 x 5 мм, а в его центре устанавливаются четыре беззубых натяжных шкива:
Сборка ползунка XZ:
Все части соединяются, ползунки X, Z и опоры регулируются так, чтобы плавно перемещаться по линейным направляющим:
4. Сборка Y
Собираются две опоры Y:
в 1-й — два стопорных подшипника для линейной направляющей Y:
во 2-й — один натяжной шкив и два стопорных подшипника:

Собирается рама, которая используется для соединения опор XZ и Y:
Первым делом этот каркас соединяется с опорами Y:

5. Двигатель Y и рабочая поверхность
Шаговый двигатель Y закрепляется на листе плексигласа размером 180 x 120 x 5 мм:

Для рабочей платформы собирается опора оси Y:
На раму Y устанавливаются шаговый двигатель Y и рабочая опора. Внизу опора укрепляется пластиной из плексигласа, чтобы рабочая поверхность не смещалась при работе плоттера:

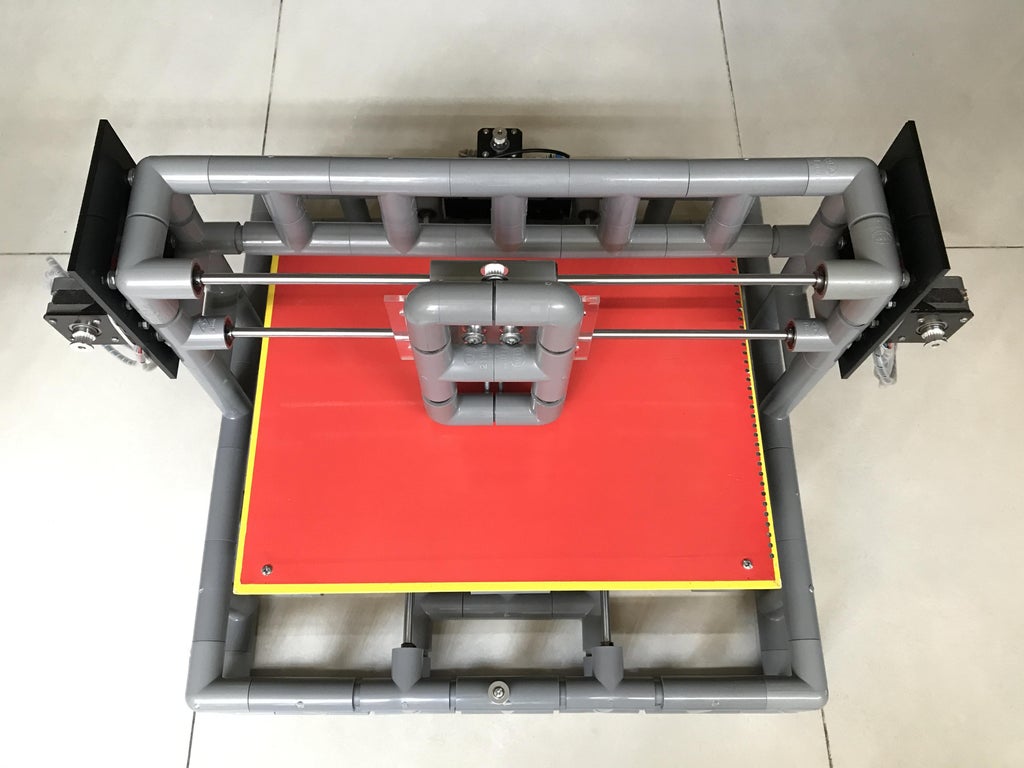
В качестве рабочей поверхности оси Y повторно используется задняя сторона календаря (размер 430 х 330 мм):
Она устанавливается на опору с помощью болтов и пружин. Благодаря пружинам можно легко откалибровать рабочую поверхность плоттера, которую часто используют на 3D-принтерах:
На опору с пластиной из плексигласа на оси Y устанавливаются Arduino Uno и плата расширения CNC shield:
6. Окончательная сборка и держатель пера
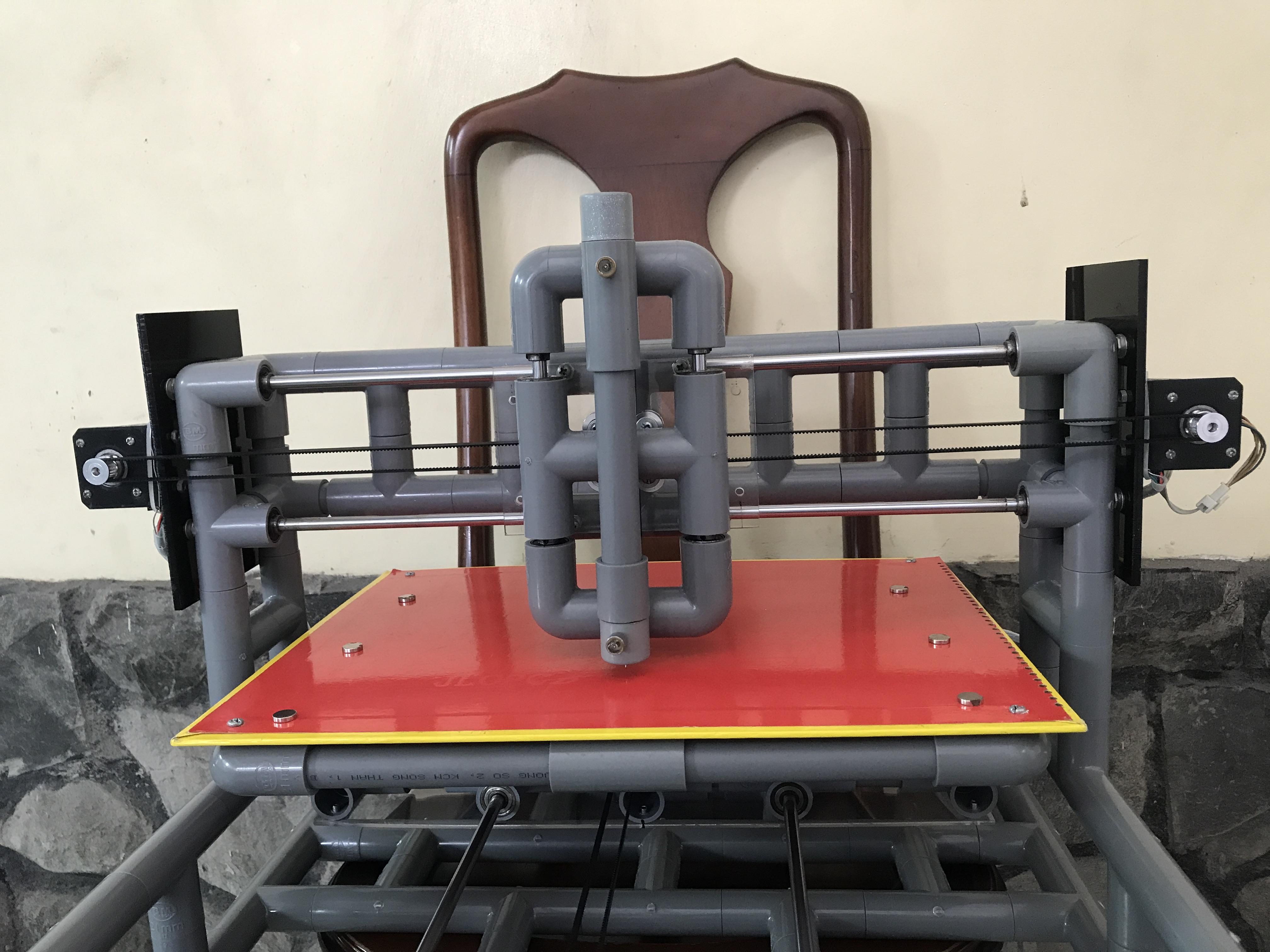
Рамы XZ и Y соединяются:
Для трёх шаговых двигателей устанавливаются два ремня привода:

Отрезается труба ПВХ, и в неё помещается перо так, чтобы высовывался только его кончик. В эту же трубу помещается пружина, чтобы кончик пера мог немного двигаться:

Этот держатель пера крепится на оси Z:
Готово!

7. Подключение
Все провода от трёх шаговых двигателей подсоединяются к плате GRBL:
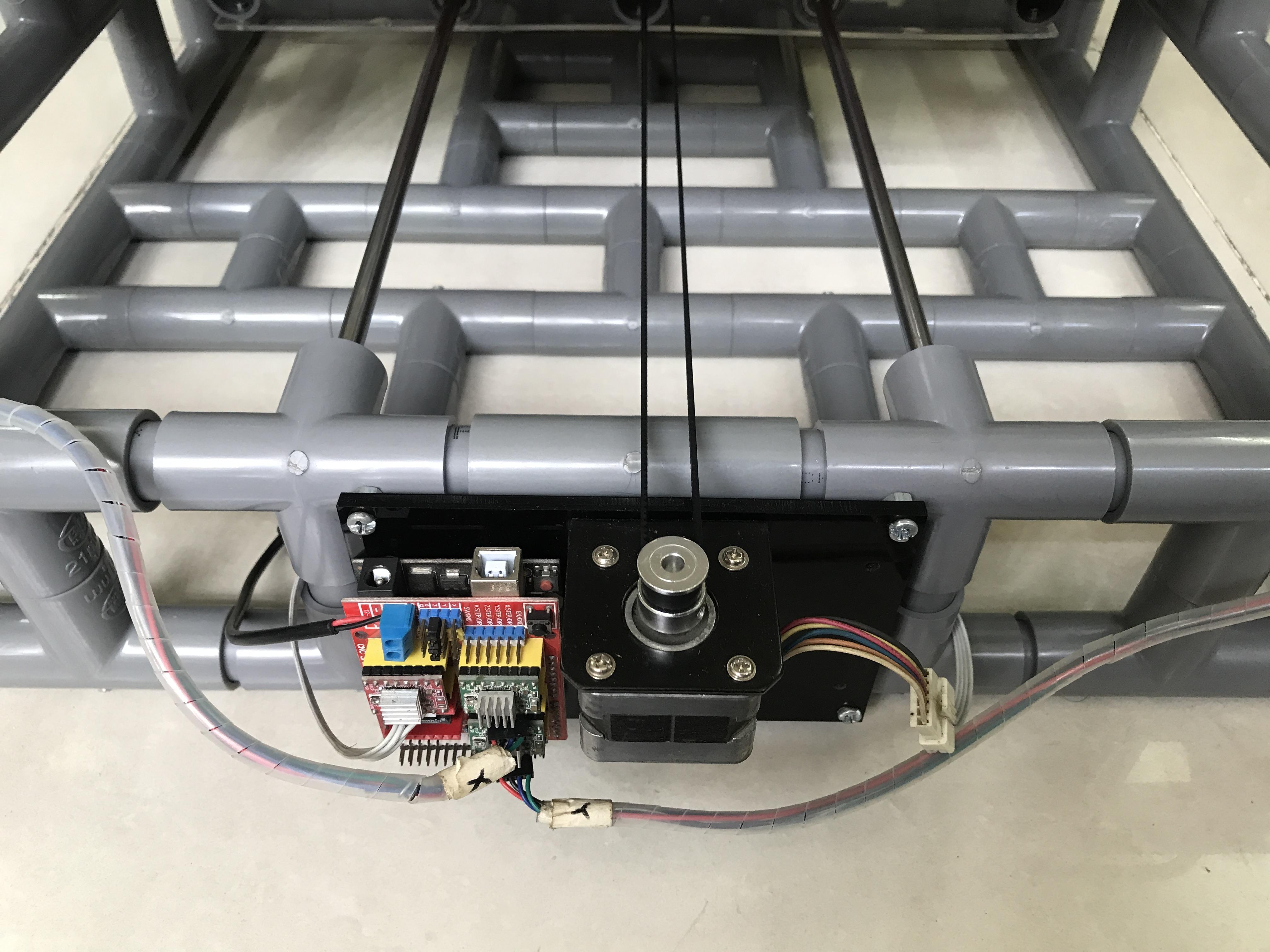
Получаются такие соединения:

Готово!
8. Прошивка GRBL
Первое. В прошивке GRBL включаем кинематику CoreXY:
Загружаем файлы прошивки GRBL.
Копируем GRBL в
C:\Users\Administrator\Documents\Arduino\libraries\.Переходим в
C:\Users\Administrator\Documents\Arduino\libraries\config.h. Чтобы включить кинематику CoreXY, раскомментируем строку с#define COREXY.Конфигурация возвращается в исходное положение (подробнее).
2. Загрузка прошивки GRBL в Arduino Uno
Внимание: перед загрузеой прошивки GRBL в Arduino, следует изменить файл config.h, как указано выше.
Открываем Arduino IDE ‣ File menu («Меню «Файл») ‣ Examples («Примеры») ‣ GRBL ‣ grblUpload.
Выбираем корректный Port («Порт») и Board («Панель управления») в Arduino Uno) ‣ Compile and Upload («Скомпилировать и загрузить») код в Arduino Uno.
3. Устанавливаем шаг (миллиметры):
Разрешение при перемещении по осям X и Y ($100 и $101):
Шагов шаговых двигателей на оборот по осям X и Y: 200.
Микрошаг: 8.
Количество зубьев шкивов: 20.
Шаг ремня привода: 2 мм.
$100 и $101 = (200 шагов * 8 микрошагов) / (шаг 2 мм * шкив с 20 зубьями) = 40 шагов/мм.Разрешение при перемещении по оси Z ($102):
Шагов шаговых двигателей на оборот по оси Z: 200.
Микрошаг: 8.
Количество зубьев шкивов: 20.
Шаг ремня привода: 2 мм.
$102 = (200 шагов х 8 микрошагов) / (шаг 2 мм * шкив с 20 зубьями) = 40 шагов/мм.9. Программное обеспечение
Вот с чем я работал:
Engraver Master или Inkscape с расширением Gcodetools: файлы G-кода создаются из текстов или изображений.
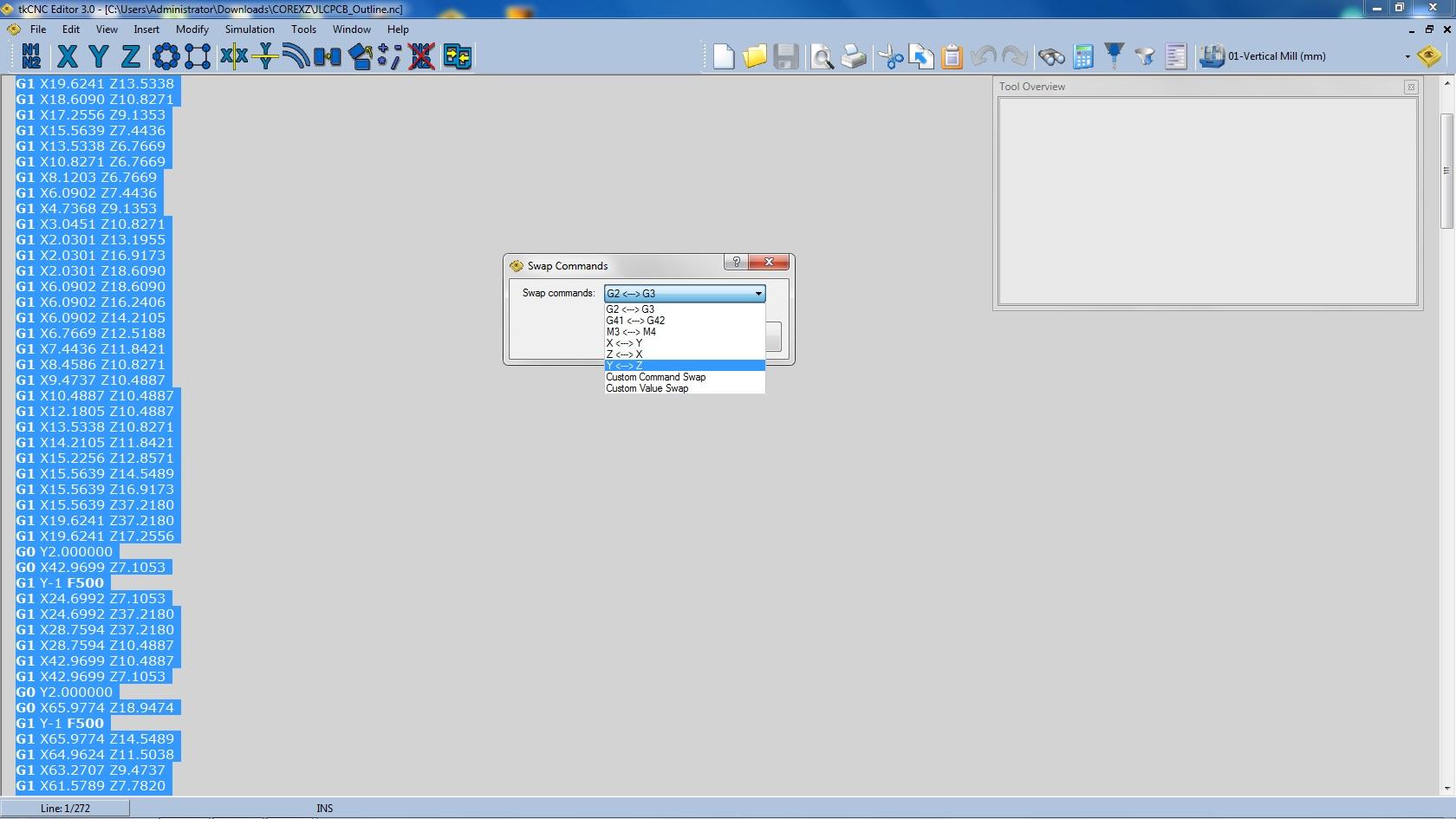
tkCNC Editor — текстовый редактор для станков с ЧПУ. Он используется операторами и программистами ЧПУ, чтобы редактировать и проверять G-код.
Чтобы плоттер работал с этим набором ПО, нужно изменить файл G-кода таким образом:
Открыть Engraver Master или Inkscape, написать текст или загрузить изображение, затем преобразовать его в G-код и сохранить на компьютере:

Открыть файл G-кода в редакторе tkCNC Editor. Выбрать всю строку G-кода ‣ Перейти в Modify («Изменить») ‣ Swap command… («Поменять команду...») ‣ Нажать Y↔Z в выпадающем списке.
В Engraver Master нужно поменять команды лазера ON/OFF на команды подъёма пера UP/DOWN:
Лазер ON: M3 или M4 заменяется, к примеру, на G1 Y-1 F500.
Лазер OFF: M5 заменяется, к примеру, на G1 Y2 F500:
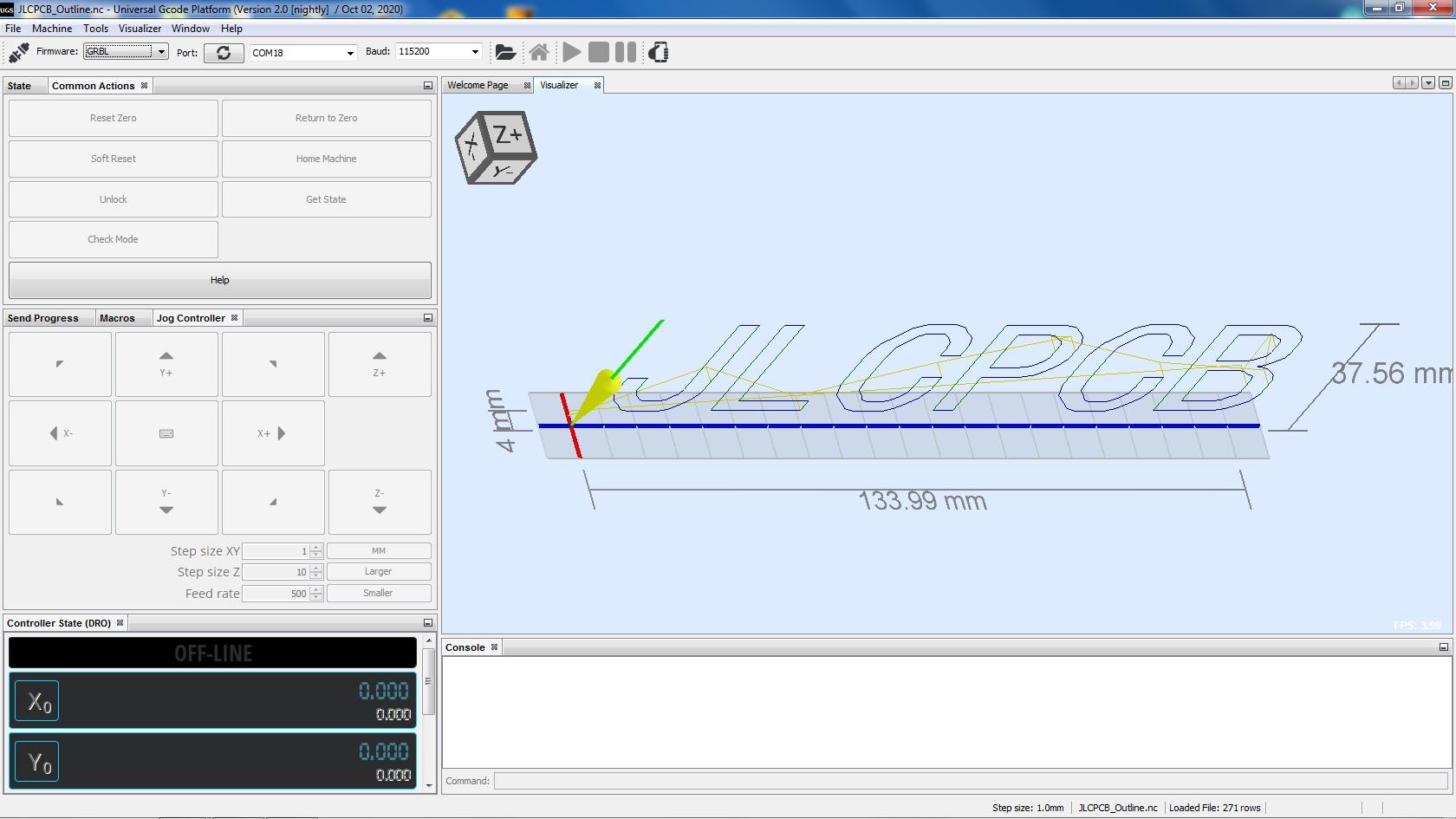
После замены команды Y↔Z файл G-кода с другим именем сохраняется и открывается в UGS. Теперь плоттер может работать как система CoreXZ:
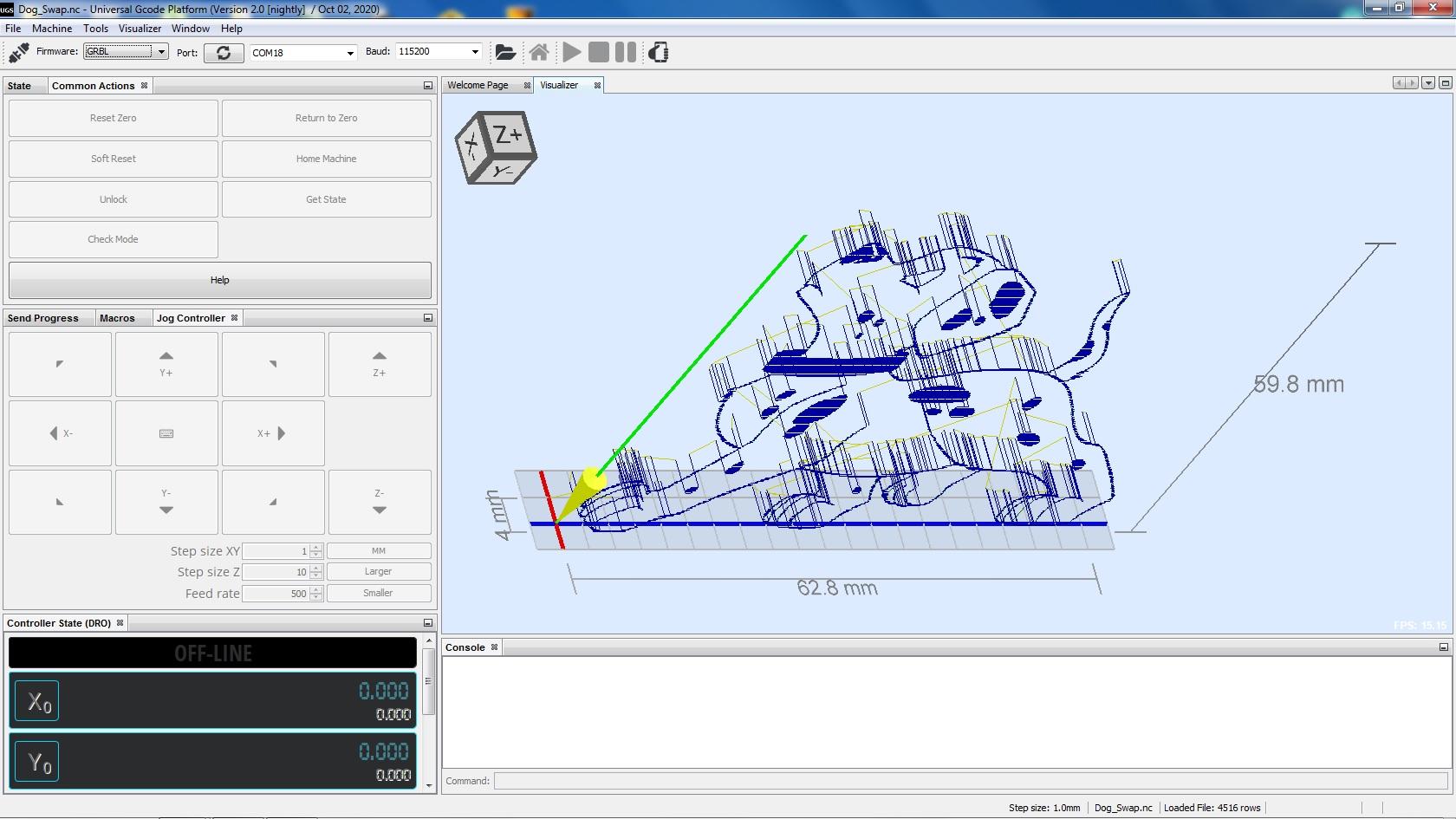
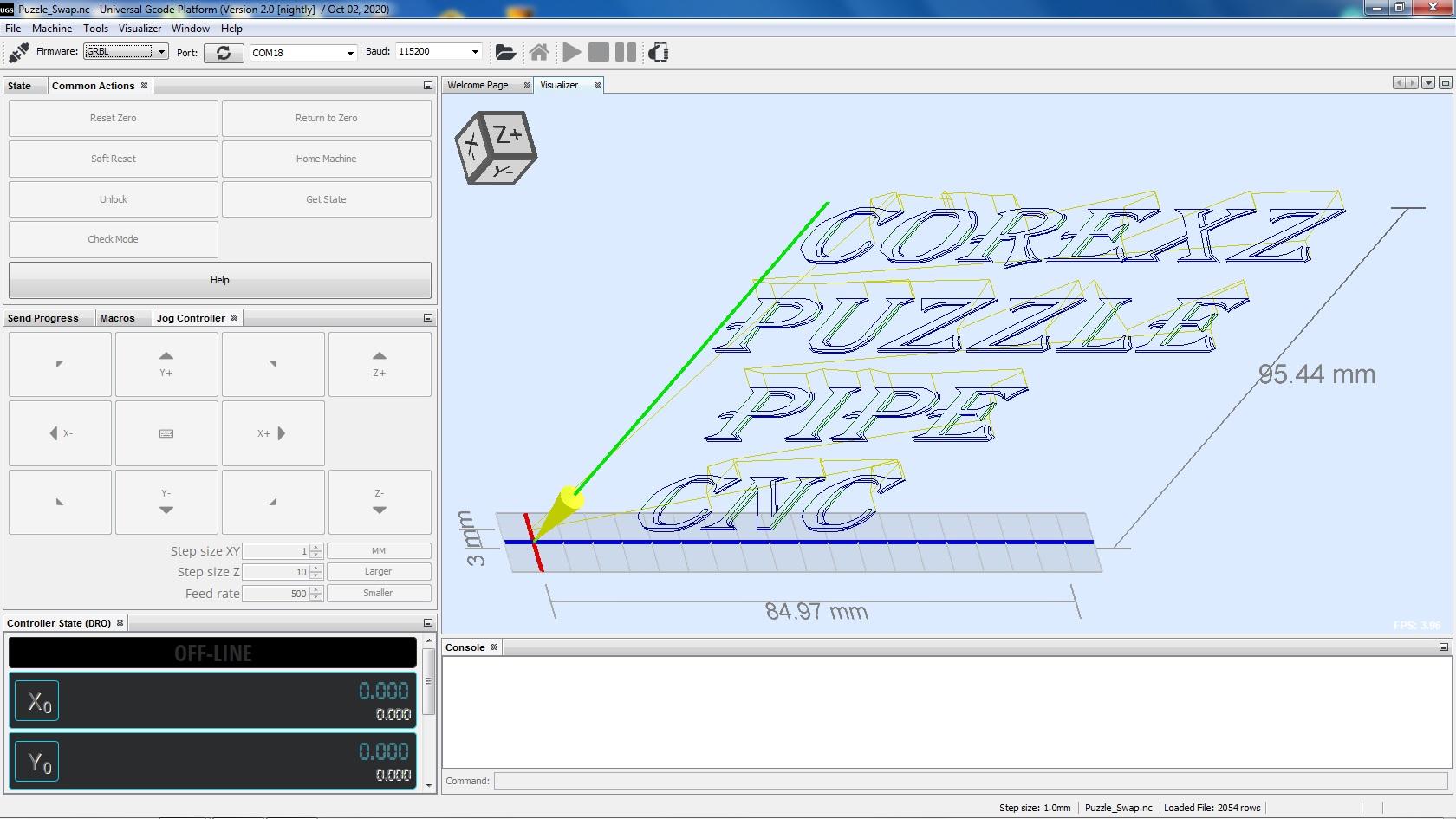
10. Тестирование

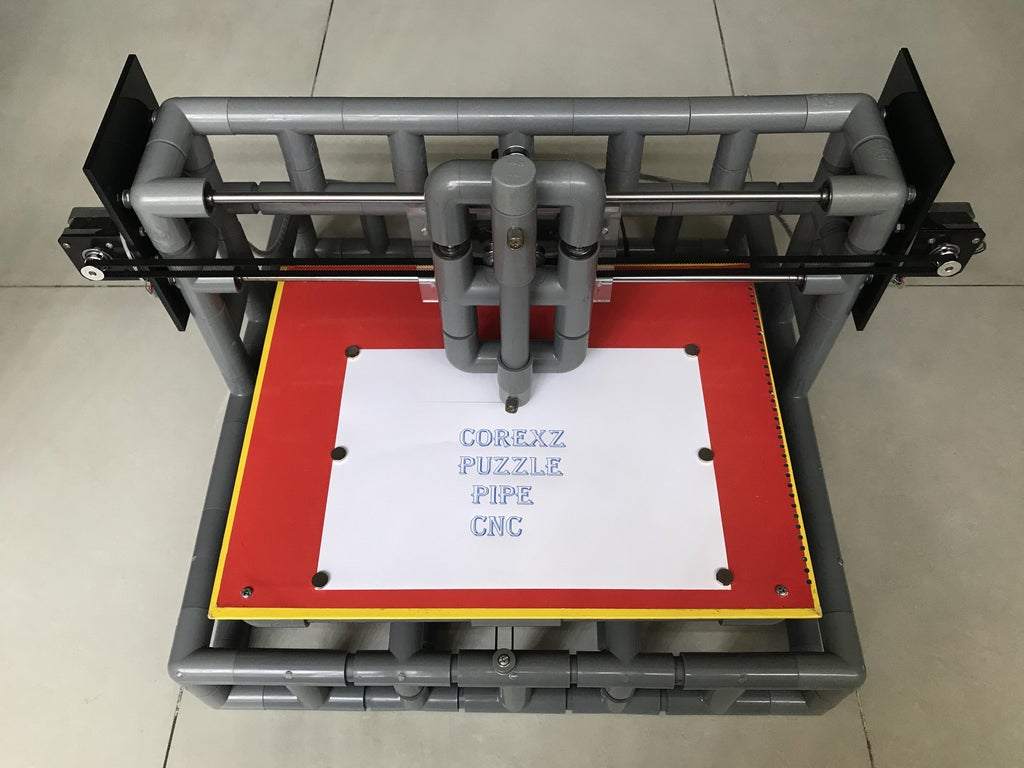


Вот результат рисования текста «JLCPCB»:

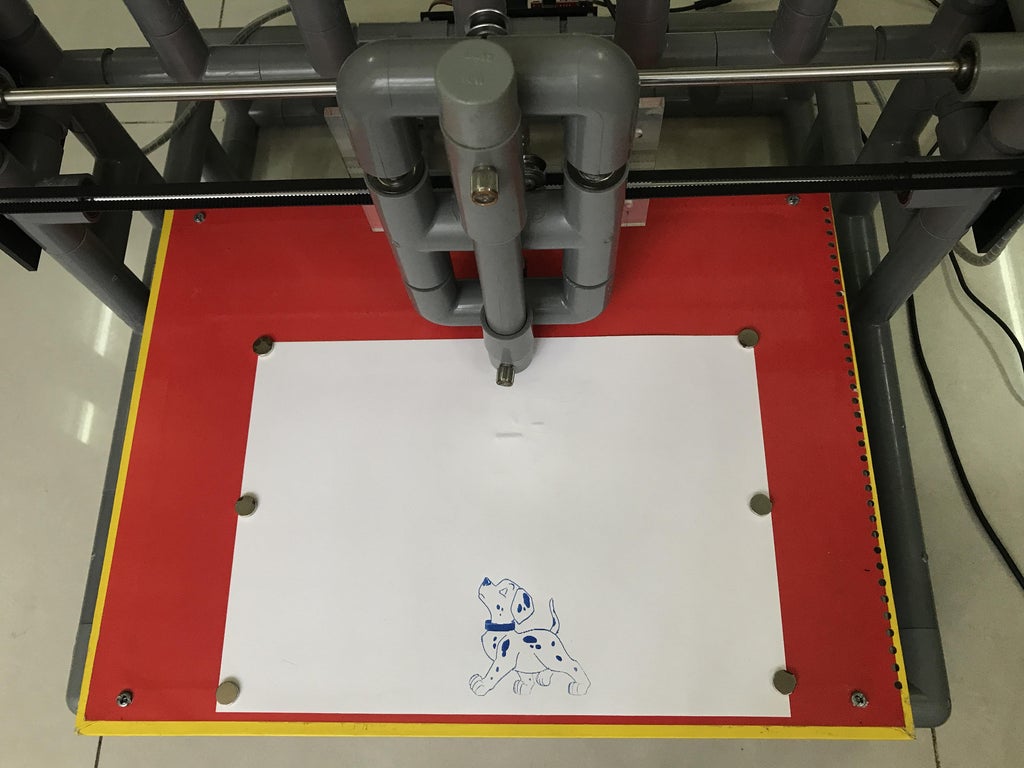
Тестировались изображения и другие тексты. Результаты довольно хорошие. Особенно впечатляет движение осей X и Z:
11. Заключение



Спасибо за внимание к нашей работе. Благодарим JLCPCB за поддержку проекта.
Видео
Выполнять самые разные проекты и решать проблемы бизнеса вы сможете научиться на наших курсах:

Узнайте подробности акции.
Профессии и курсы
Data Science и Machine Learning
Python, веб-разработка
Мобильная разработка
Java и C#
От основ — в глубину
А также
Комментарии (6)

Serge78rus
03.01.2022 23:40Первым в перечне необходимых инструментов значится перфоратор. Позабавило, хотя понимаю, что это скорее всего неудачный перевод. С тройниками, Т-образными трубками и т.д. тоже не все понятно.

PKav
04.01.2022 02:27+2Во-первых, это не CoreXZ, а CoreXY, поставленный боком. Хотя, CoreXZ, как по мне, вообще проектировали наркоманы.
Во-вторых, зачем такая кинематика здесь и вообще зачем здесь третья ось? Подъем-опускаение ручки можно было бы реализовать гораздо проще.
В третьих, параллельность и перпендикулярность конструкции будет довольно унылой и постоянно плыть. О жесткости лучше вообще не говорить, чуть скорость поднять и ручку начнет заносить на поворотах.

anton19286
04.01.2022 09:34+1и фитинги ПВХ у нас не распространены. по крайней мере в продаже не видел
vipassa
Интересно, но зачем? Уже есть сотни вариантов изготовления подобных аппаратов из различных вариантов.
P. S. Но в закладки добавлю!
lab412
как зачем? там же в начале указано - чтобы вставить рекламу конторы делающей платы и получить бабосик
skiedr
Это же классика: "XXX из сантеха", все по заветам Алекса Гайвера.