
2 февраля 2022 года на Science.org в разделе журнала Science Robotics вышла статья от коллектива австрийских учёных из Линцского университета имени Иоганна Кеплера. Название звучит как «3D printing of resilient biogels for omnidirectional and exteroceptive soft actuators», то есть, «3D-печать эластичных биогелей для многонаправленных и экстероцептивных мягких приводов». Под этим подразумевается новый шаг в интересном и весьма перспективном направлении разработок в современной робототехнике: мягкой робототехнике, soft robotics.
Видеоролик о 3D-печати биогелей на основе желатина:
Если традиционная робототехника имеет дело преимущественно со сталью и пластиком, мягкая робототехника опирается на разнообразные материалы, гораздо более похожие на биологические ткани организмов. «Чистый» мягкий робот из гидрогеля обычно похож на беспозвоночных животных: беспанцирных моллюсков и червей. Они служат источником вдохновения для разработчиков именно потому, что способны двигаться без какого бы то ни было жёсткого каркаса или панциря.
Достаточно вспомнить то, какие сложнейшие действия способны выполнять своими щупальцами наиболее интеллектуально продвинутые из беспозвоночных: осьминоги. И насколько всепроникающими они при этом оказываются за счёт отсутствия жёстких каркасных элементов. Ведь даже достаточно крупный осьминог оказывается в состоянии просочиться через узкую щель, или точными действиями всего тела открутить крышку банки, куда его посадили.
Естественно, создание подобных систем весьма сложно, в каком-то смысле не менее, а то и более сложно, чем постройка полноценных шагающих дроидов вроде широко известных четвероногих и двуногих роботов от Boston Dynamics. Здесь робототехника неотделима от механики сплошной среды, и потому «мягкое» её направление называется также continuum robotics.
Это открывает необычные и потенциально очень широкие возможности для применения мягкой робототехники: и как самостоятельных, полностью мягких машин, и как элементы робототехнических устройств, сочетающих в себе мягкие и «традиционные» жёсткие части.

В чём же заключается инновация от команды австрийских учёных из Линца? Им удалось подойти к решению проблемы баланса между устойчивостью и разлагаемостью вещества мягких роботов.
Если делать их, скажем, из силикона и полимеров, как обычно и происходит сейчас у большинства разработчиков — они будут весьма долговечны, но возникает проблема продолжения загрязнения и без того заваленной отходами среды. Если делать их из биоразлагаемых материалов — они стремительно растворялись, плесневели и биоразлагались иными способами. А значит — выходили из строя слишком быстро, в том числе в самые неподходящие моменты, что крайне неудобно для эксплуатации.
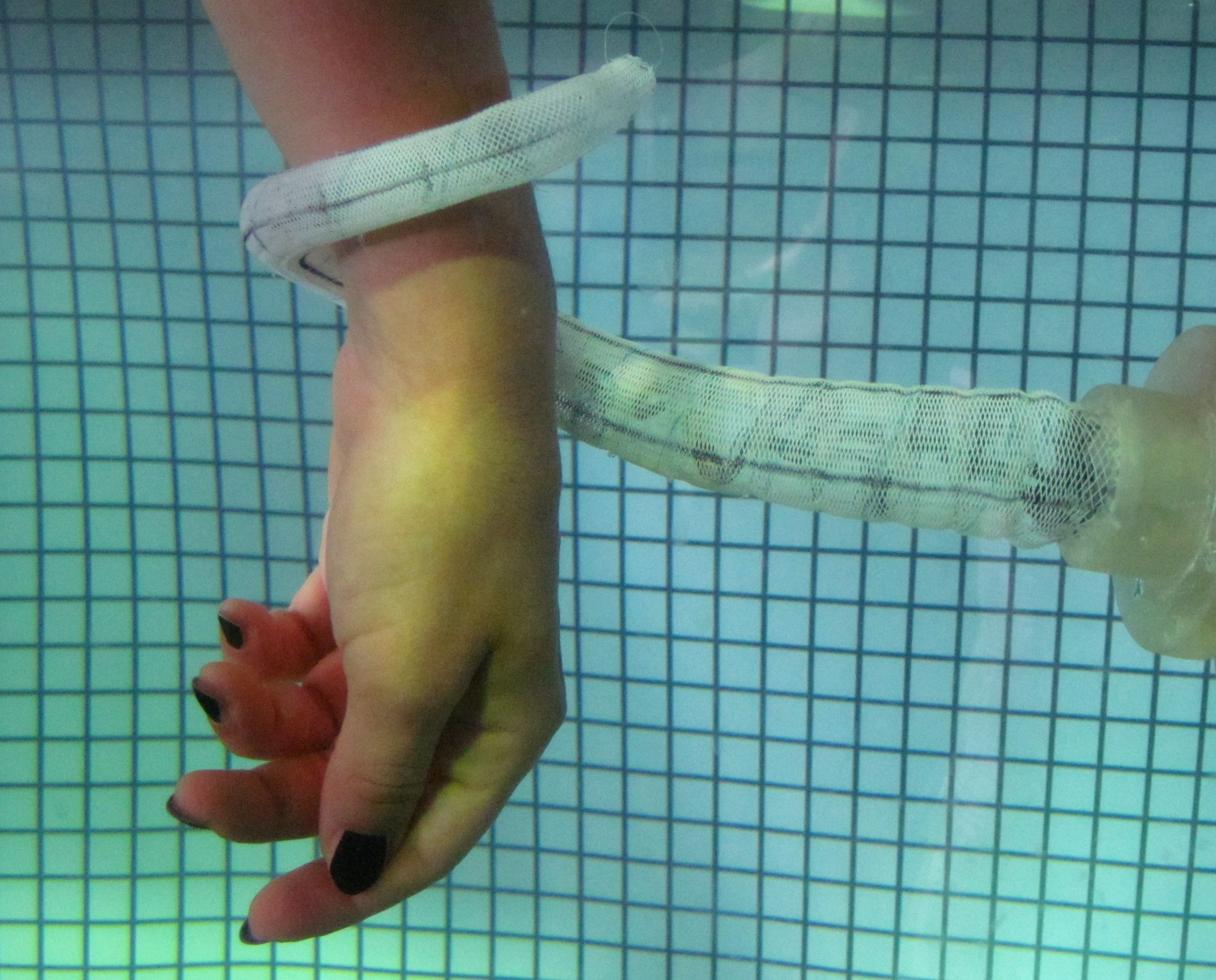
Австрийские исследователи соорудили пальце- или червеобразного мягкого робота посредством 3D-печати гидрогелем из веществ, доступных на многих домашних кухнях: сочетания желатина, сахара, лимонной кислоты и глицерина. Лимонная кислота за счёт изменения pH препятствует появлению на роботе плесени и деструкции корпуса микроорганизмами, а глицерин — быстрому растворению в водной среде или высыханию желатина.

Полученный биогель является очень гибким и способен к 5-6 кратному растяжению. Он дополняется мягким экзоскелетом из хлопковых нитей и пневмотрубок. В сочетании с датчиками из светодиодов и трубок получившийся «мягкий робот» способен не только изгибаться в разных направлениях, но и давать оператору точные данные о соприкосновениях с внешним миром, с помощью системы из одноплатного компьютера Raspberry Pi и контроллера… от древней игровой приставки :)
Система оказалась хорошо управляемой, достаточно мягкой и одновременно твёрдой для отбрасывания предметов, достаточно устойчивой к среде при биоразлагаемости, и при этом способной к получению обратной связи от внешнего мира. Это небольшой, но важный шаг на пути широкого и массового внедрения мягких робототехнических систем в самые широкие сферы деятельности.

А внедрять есть куда. В том числе в буквальном смысле: биоразлагаемые устройства с абсолютным минимумом неорганики (чему может поспособствовать как массовое производство микрочипов размерности 1-3 нм, так и переход к чипам на основе арсенида галлия, потенциально способным преодолеть фундаментальный для кремния порог в 1 нм) могут использоваться в том числе в форме микродронов для медицинских процедур непосредственно в тканях живых организмов.
Мягкие роботы и части роботов благодаря подсмотренным у моллюсков и червей конструктивным схемам могут, посредством систем гидравлических или пневматических полостей и трубок, совершать крайне сложные действия, в том числе невозможные для «жёстких» конструкций из металла и пластика. При этом их манипуляторы и корпуса гораздо безопаснее для сосуществования с человеком, чем жёсткие варианты — способные при малейшем сбое ранить или убить оказавшееся рядом живое существо.
Ну а изобретение учёных из Линца, помимо устойчивости и экологичности, упрощает задачу 3D-печати мягких роботов из созданной ими смеси: если соблюдать температурный режим, она оказывается даже проще и быстрее полимерной. Кроме того, из одного и того же полученного объёма их варианта гидрогеля можно заново печатать объект до пяти раз, прежде чем его можно отправить на утилизацию посредством биоразложения в водной среде. Предложенный ими подход может привести к появлению всё более дешёвых, надёжных и удобных в производстве мягких и гибридных роботов, что уже в ближайший десяток лет имеет шансы на массовое распространение.
К тому же именно гибридная робототехника, то есть, мягкая в сочетании с традиционной, может через некоторое время привести к появлению полноценных человекообразных роботов. Собственно, классические андроиды научной фантастики часто и представляют собой нечто подобное: достаточно вспомнить персонажей «Чужих» и многих, многих других.

Комментарии (5)

rPman
02.04.2022 17:51+13Когда я вижу в очередном ролике в качестве одного из первых аргументов что то про не разлагаемый мусор и про биоразлагаемость, мне хочется рычать :) как же достало это лицемерие.
Хотите победить рост мусора на планете — вводите законы против запланированного устаревания и увеличивайте сроки годности и хотя бы частичное переиспользование, особенно когда это в принципе не противоречит задаче.
Например модульность вместо монолита и единые стандарты, чтобы не было полной модульности но только в пределах одного производителя, ибо это насмешка.
Сейчас главная причина уменьшения сроков годности практически всей электроники и бытовой техники (да всего) и искусственные преграды против переиспользования исключительно из желания производителей получать больше денег, а точнее перевод модели оплаты с покупки на арендную плату и вендорлок.
Darth_Biomech
03.04.2022 16:56Мусор не победить, энтропию не обманешь. Проблема не в том сколько мусора мы генерируем, проблема в том как мы с этим мусором обращаемся. Я не кидаю пластик в океан. Я не бросаю мусор на улице. Я выношу пакет с мусором в специально предназначенные для этого контейнеры. Если потом этот мусор оказывается в реках и океане, то это уже не моя вина, это вина напрямую компании по утилизации мусора. И в первую очередь регулировать и устраивать проверки нужно именно им, поскольку это их ответственность чтобы вверенный им мусор был переработан или экологически захоронен.

Damn_God
04.04.2022 08:28Интересная, но к сожалению трудновыполнимая идея. Я бы сказал - Утопичная. В условиях рынка банально невозможно устроить подобное, если только вы не предлагаете ограничивать рынок и губить предприятия, которые не могут перейти с одного производства на другое. Так-же некоторые вещи банально нельзя/не на что перерабатывать, для условного примера возьмём идею перерабатывать старые видеокарты, платы и материнки, банально сдирая материалы и закидывая в топку. Плюсом, модульность уступает монолиту в прочности и надёжности крепления, если вы конечно не хотите быть погребённым под монументальным щупальцем К’тулху, отвалившемся от модульной конструкции из-за сильного ветра. Вообщем, хочу продолжить обсуждение данной темы ;)
Chupakabra303
Для традиционной робототехники важнее не «сталь и пластик», а медь и магниты. Основное это приводы, актуаторы. А тут, я так понимаю, используется пневматический привод. Ну что ж, такие роботы тоже уже есть. «Дуть в гель» это конечно, что-то новое, но все равно нужны традиционные компрессоры, запорно-регулирующая арматура. Вот если бы этот гель сокращался как сердечная мышца при пропускании электрического тока, тогда можно было бы пофантазировать. Можно было бы из геля сделать всего робота за исключением стимулирующей сокращения электроники.
Format-X22
А таких материалов ещё нет? ????