
Электрические цепи можно описать следующими уравнениями:
для катушки
для конденсатора
для резистора
(Напряжение падения на катушке равно минус ЭДС)
В механике есть следующие уравнения:
для массивного тела
для пружины
для вязкого трения
(Внешняя сила, действующая на пружину равна минус силе состороны пружины, если в точке приложение силы нет массы)
Как вы наверно догадались, электрические и механические величины можно сопоставить двумя способами:
| электро | мех.1 | мех.2 |
|---|---|---|
| U | F | v |
| I | v | F |
| Ф | p | x |
| Q | x | p |
| L | m | 1/k |
| C | 1/k | m |
| R |
Обычно, когда пытаются провести электро-механическую аналогию, используют первый способ, хотя кое-где можно встретить и второй, им-то мы и воспользуемся.
Но мы будем моделировать во вращательной механике, где каждую поступательную величину мы заменим соответствующим моментом или угловой величиной:
, где
— угловая жесткость
, где
— угловая вязкость
Но для простоты обозначать будем как в поступательной механике:
- напряжение
— скоростью вращения вала
- силу тока
— моментом сил, возникающим в валу
- магнитный поток через катушку
— угловой деформацией пружинки
- заряд конденсатора
— моментом импульса маховика
- индуктивность катушки
— обратной угловой жесткости пружинки
- емкость конденсатора
— моментом инерции маховика
- сопротивление резистора
— обратной углового коэффициента вязкого трения чего-то в чем-то
Так как в электричестве есть понятия потенциал (в точке) и напряжение (между точками), потенциал мы будем моделировать скоростью вращения вала, а напряжение — разностью скоростей двух валов. Ее можно получить при помощи дифференциала (как в автомобиле), у которого один из боковых валов инвертирован:

Выше были изложены пространные теоретические рассуждения, почему мы будем делать именно так. Дальше будет непосредственно описано, как мы это будем делать.
Перейдем к моделированию электрических компонентов:
Источник напряжения
Можно моделировать как вал, вращающийся с постоянной скоростью (который ну ни как невозможно остановить), и подключенный к разностному входу дифференциала. С двух других его концов можно снимать напряжение (они крутятся друг относительно друга с постоянной скоростью).
Источник тока
То же самое, но только используется вал, выдающий постоянный крутящий момент. Такой вал без нагрузки будет разгонятся до бесконечно большой скорости вращения.
Резистор я бы замоделировал так:
От дифференциала идут лопасти и опускаются в стакан с жидкостью.

Чем более вязкая жидкость — тем больше проводимость, тем меньше сопротивление. Между несоединенными валами бесконечное сопротивление. А у резистора, у которого заклинило лопасти — сопротивление нулевое. Можно пофантазировать о напряжении пробоя, и трении между валом и его держателями, но по моему это сходство как-то не очень.
Конденсатор — маховик, присоединенный к дифференциалу

Так же как и в идеальном конденсаторе нет тока утечки, также и в его модели совсем нет трения. Так же как сила тока заряжает конденсатор, так же момент сил между валами разгоняет маховик. В таком конденсаторе на одной пластине всегда заряд
Также емкостью может обладать одиночная сфера (или проводник другой формы). Если он заряжен зарядом Q, то на его поверхности будет потенциал
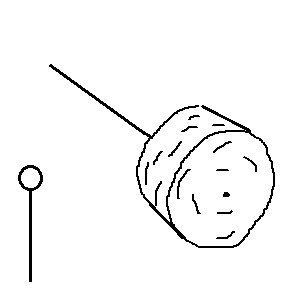
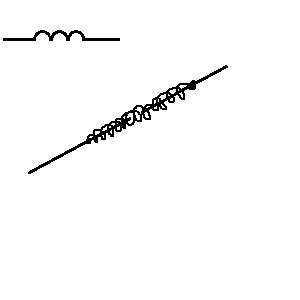
Катушка — пружинкой, присоединенной к дифференциалу

(«Заземлением» будем обозначать неподвижные части конструкции)
Где v — разность скоростей двух валов, а x — их относительное смещение.
Если считать, что жесткость пружинки достаточно велика, а момент сил, передаваемый из одного вала в другой, достаточно мал, то катушку можно замоделировать так:
Если пофантазировать, то можно провести аналогию между петлей гистерезиса ферромагнетиков и неупругой деформацией пружинки. Правда в ферромагнетиках нет аналога усталости металла.
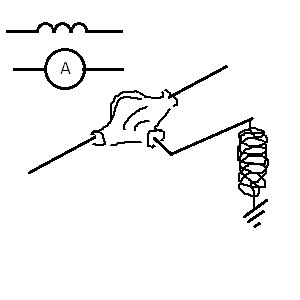
А также, модель катушки можно использовать как модель амперметра, если присоединить стрелку к выходу дифференциала.
Ее направление отклонения от положения равновесия будет свидетельствовать о том, в какую сторону вал №1 толкает вал №2. А ее величина — о моменте сил, с которым один вал воздействует на другой, т.е. о силе тока через моделируемую катушку.
И из казалось бы самого простого закона
В принципе в катушке можно обойтись без дифференциала, но в трансформаторе, который содержит в себе пару катушек, так уже не получится.
Рассмотрим парочку переходных процессов.
Источник напряжения, ключ, резистор, (изначально незаряженный) конденсатор.

Изначально конденсатор не заряжен.
Включаем ключ (после этого
Изначально маховик покоится.
Включаем ключ (после этого сумма скоростей маховика и лопастей резистора равна скорости источника напряжения), маховик в начальный момент покоится, а лопасти резистора (невесомые) начинают вращаться, но из-за трения возникает момент сил, который разгоняет маховик. Чем быстрее крутится маховик, тем медленнее крутятся лопасти резистора, и тем с меньшей силой вращают маховик. Если через некоторое время ключ разомкнуть, то маховик продолжит вращаться не меняя своей скорости, а скорость лопастей резистора упадет до 0.
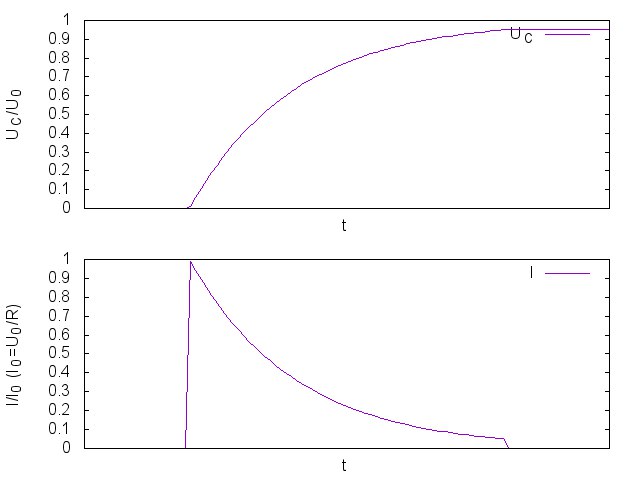
Источник напряжения, ключ, резистор, катушка.
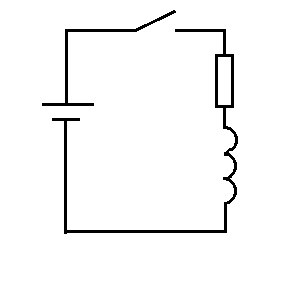
Вначале ток равен нулю. Мы включаем ключ (после этого
Вначале пружинка не растянута. Мы включаем ключ (после этого сумма скоростей деформации пружинки и лопастей резистора равна скорости источника напряжения), и пружинка начинает растягиваться так, как будто в самый начальный момент сопротивление резистора =0. Уже растянутая пружинка начинает оказывать силу на резистор, в результате чего в резисторе возникает разность скоростей, а в пружинке разность скоростей начинает уменьшаться. Чем больше пружинка натянута, тем большую силу она оказывает на резистор, тем больше разность скоростей в резисторе, и тем меньше разность скоростей в катушке (вернее в ее модели), и тем медленнее растягивается пружинка катушки дальше. Если через некоторое время ключ разомкнуть, то в результате практически мгновенного падения нагрузки на пружинку, она очень быстро сожмется в исходное положение.
Механическую модель можно упростить, представив себе покоящуюся на воде невесомую лодку, к которой прикреплена пружинка, а другой конец пружинки внезапно начинают тянуть с постоянной скоростью. Вначале лодка покоится. Потом пружинка начинает натягиваться, и чем больше натягивается, тем больше увлекает за собой лодку, и тем меньше разность между скоростями двух концов пружинки. А если пружинку отпустить (масса кораблика и масса пружинки =0), то кораблик тут же остановится, а пружинка тут же сожмется.

И, наконец, механическая модель трансформатора.
Сам трансформатор описывается также как катушка:
где
- U — столбец напряжений
и
на 1й и 2й катушках.
- Ф — столбец магнитных потоков
и
через 1ю и 2ю катушку.
- I — столбец токов
и
через 1ю и 2ю катушку.
- L — симметричная (
) матрица взаимных индуктивностей
между соответствующими катушками.
Иначе говоря трансформатор описывается системой уравнений:
И чтобы получить механическую модель трансформатора, достаточно взять механические модели двух катушек, и соединить их пружинкой через рычаг:
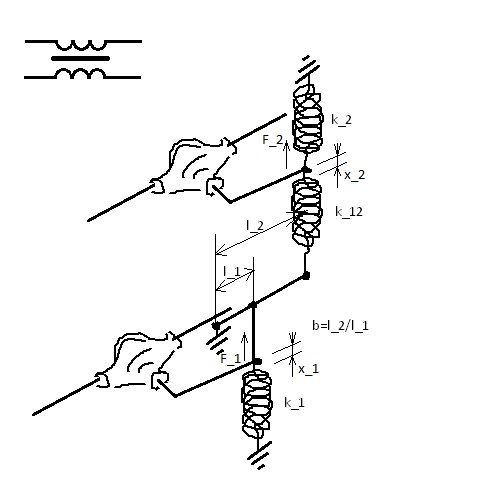
Можно все поступательные пружинки заменить на вращательные, а рычаг заменить на редуктор:

Найдем уравнения, описывающие эту систему.
Предположим, что верхнее плечо сместилось вверх на
что тоже самое с
ее можно разрешить относительно
где
Сравнивая эту систему с (1) получается, что матрицу
следует сопоставлять с матрицей
И если у нас есть трансформатор, у которого все витки одинаковые по форме и сечению, на 1й обмотке
где
Если в его модели взять
отношения жесткостей пружин будут выглядеть так:
а матрица индуктивностей модели так:
т.к.
то соотношения жесткостей тоже >0 (если исключить из модели рычаг, т.е. b=1, то одно из этих соотношений окажется отрицательным, а пружин с отрицательной жесткостью не бывает).
И обратно: при любых соотношения жесткостей пружин
и при любом соотношении плеч рычага b>0
При
При
Для примера работы трансформатора рассмотрим схему: источник переменного напряжения, трансформатор, резистор
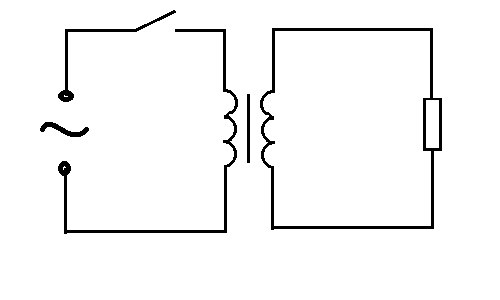
и рассчитаем ее
->
пусть
тогда
последнее уравнение можно переписать в виде
OPOC:
Этот вклад будет виден только сразу после включения схемы, потом затухнет и не будет участвовать в установившемся режиме трансформации.
Если изменить уравнение так:
и искать ЧРНС в виде
=>
т.к.
В случае с механической моделью этой схемы
где величины в квадратных скобках следует заменить их механическими аналогами.
Как и ожидалось, жесткость первой пружинки ни какой роли не играет (при любом c).
Если упростить механический аналог этой схемы, то у нас получится невесомый кораблик на воде, через пружинку привязанный к берегу, и который через другую пружинку и рычаг двигают туда-сюда по гармоническому закону.

Нелинейные элементы
Из нелинейных элементов диод можно храповиком замоделировать, операционный усилитель (который работает так: если напряжение на входе + больше чем напряжение на входе -, то он выдает +U, а если наоборот, то -U) — как на картинке, а транзистор — я не придумал как.

Вместо заключения
В моделях резистора, диода и одиночной катушки можно обойтись без дифференциала. Если пофантазировать, трение валов в креплениях можно интерпретировать как ток утечки через изолятор провода, деформацию валов — как паразитную индуктивность проводов, а момент инерции валов — как паразитную емкость. А вот модели проводов в себе не содержат сопротивления — они сверхпроводящие.
Было бы прикольно, если б кто-нибудь в реальности что-нибудь такое сделал (например из лего-техника, или на 3d принтере напечатал), да на ютуб выложил.
Комментарии (38)

akinchicantonvasilevich
22.06.2016 12:25-1Идея хорошая, но сырая, как минимум. А что с иллюстрациями?
dima32rus
22.06.2016 13:05+2И электрические цепи, и механические системы описываются однотипными дифф. уравнениями. Разница только в физическом смысле постоянных коэффициентов и их величинах. Поэтому механическую систему вполне возможно моделировать с помощью электрических цепей, и наоборот. Когда я учился, мы делали подобные лабораторные работы.
Вообще, идея хорошая. Т.к. механику проще понять исходя из бытовых представлений. Наверное, все знают, как будет вести себя пружинный маятник, если натянуть пружину и отпустить его. В электричестве это не всегда очевидно. Поэтому такие параллели помогают на качественном уровне осознать некоторые физические явления, лучше понять общее поведение системы.

qbertych
22.06.2016 14:41Мне кажется, что представление нелинейных элементов через механику — дело заведомо гиблое: красивая система уравнений/логики сразу же превратится в невесть что. Диод еще куда ни шло, но все остальное — это слишком. Изучать обратную связь в операционнике через десяток валов — боже упаси, есть же более наглядные примеры типа паровой машины или сливного бачка =).
А вот для понимания основ «что такое конденсатор» на пальцах — самое оно.
rPman
22.06.2016 18:55Основная проблема люфты и деформация/разрушение механических соединений.
В остальном — все даже очень круто, причина — 3D-принтеры могут автоматизировать даже самые дикие фантазии (с оговорками и/или высокой ценой либо за точность либо за размеры)
FeelUs
22.06.2016 19:29в принципе, это универсальный конструктор, и, наверное, каждую механическую схему, собранную из этого конструктора, можно упростить также как я показал упрощенные примеры для схем с катушкой и трансформатором.

slopestyler
22.06.2016 18:53Жаль, всё останавливается на нелинейных элементах — а то я бы посмотрел на механический аналог затягивания частоты.
:)FeelUs
22.06.2016 19:09мне кажется людям наоборот будет интересно пофантазировать с нелинейными элементами :)
antstar
22.06.2016 18:53Транзистор — коробка передач, вариатор для плавности. Чем выше напряжение затвора-базы (выше передача), тем большая мощность передается от истока-коллектора (двигателя) на сток-эммитер. В простейшем случае.
dima32rus
22.06.2016 22:18Насчет транзистора и коробки передач смею с Вами не согласиться. Коробка передач не увеличивает мощность, а даже наоборот, немного ее уменьшает за счет потерь в самой коробке. Мощность на валу определяется произведением момента на угловую скорость. Именно поэтому на автомобиле трогаются с первой передачи — при одной и той-же мощности на тихоходном валу возникает высокий момент. А транзистор как раз увеличивает мощность входного сигнала.
Тут, наверное, более уместно подошел бы трансформатор. Он передает входную мощность на выход (за вычетом потерь). Говоря другими словами, во сколько раз мы уменьшаем напряжение на вторичной обмотке, во столько же раз возрастает выходной ток. Так же, как и в коробке передач. Только там скорость и момент, а здесь напряжение и ток.

tormozedison
22.06.2016 22:37+1В начале двадцатого века были такие механические «транзисторы» для усиления звука. От динамика проводился в движение быстродействующий клапан, регулировавший интенсивность потока воздуха от компрессора. На выходе — усиленные звуковые колебания (десятки ватт)
rPman
22.06.2016 18:57Частный случае электросхем — бинарная логика, на механике в теории делать проще и полезнее :)
даешь компилятор verilog в stl, готовый к отправке в слайсер и на принтер.

Alex_Hannibal
Еще в универе при изучении электротехники возникла идея, что электричество может быть замоделировано для наглядности водой.
Спасибо, что напомнили. Может в ближайшее время даже запилю простенькую трехфазную сеть.
FeelUs
а меня в 9м классе идея с водой не устроила и я вот это выдумал, кроме трансформатора.
А сейчас (спустя 7 лет) и трансформатор придумал и вот запостил.
Вот интересно, знает ли кто-нибудь способ замоделировать трансформатор в модели с водой по трубам?
BubaVV
Внятного и простого наверное нет: http://easyelectronics.ru/osnovy-na-palcax-chast-2.html#comment-33884
Alex_Hannibal
Сначала надо определиться что в модели будет отвечать за I и U.
А потом надо и думать как замоделировать.
FeelUs
я имел ввиду U — F; I — v
Alex_Hannibal
Я это понял.
А какое уравнение будем брать и какие физические величины со стороны воды принимать за v и F?
Полагаю, что можно попробовать взять уравнение Эйлера и с ним уже работать.
FeelUs
или не с водой, а любую механическую систему, удовлетворяющую системе ур-й

kneeze
Аналог напряжения — напор, аналог тока — расход жидкости.
FeelUs
Все элементы все равно располагаются на турбинах так же как в статье все располагается на дифференциалах.
Скорость — это скорость или расход жидкости, который напрямую конвертируется в скорость турбины.
Потенциал — давление,
Напряжение — сила или разность давлений, которая напрямую конвертируется в силу, с которой турбина взаимодействует с тем, что к ней прикреплено.
А турбину считаем идеальной, без трения и проскальзывания жидкости.
niknamezanat
А разве обычный гидравлический поршень с разными входным и выходным сечением не подходит?
FeelUs
нет, не подходит. Он удовлетворяет двум независимым ур-ям



в то время, как нам нужна механическая система, удовлетворяющая системе уравнений
niknamezanat
Не претендую на точность, но не одно из приведенных вами уравнений мне не кажется верным.
P1/P2=S2/S1 на мой взгляд вполне соответствует U1/U2=N2/N1 для трубопроводной аналогии, только как их перевести в вашу систему механических замен не знаю, в ней нет категорий площади и количества витков.
FeelUs
Во первых P1==P2 (если не учитывать перепад высот между поршнями, или не учитывать гравитацию). ).
).%0A)
Во вторых в формуле U1/U2=N1/N2 (там где больше витков — там больше напряжение) U1 и U2 — амплитуды синусоидальных сигналов, а я речь веду о мгновенных величинах.
В третьих формула U1/U2=N1/N2 верна только в том случае, если магнитный поток, проходящий через 1ю катушку полностью проходит и через 2ю, т.е. c(которая в статье)==1 (
Т.е. формула U1/U2=N1/N2 выводится из
niknamezanat
1.У меня поршень другой конструкции. В нём Р1!=Р2, а F1==F2. https://drive.google.com/file/d/0B2Pmo7L2y-4ZWklOSnRqUWI4dmM/view?usp=sharing
2.3.Ну я не настолько глубоко копаю, чтобы рассматривать общие случаи, мне хватает идеального для аналогий. В вашем исправленном уравнении ниже, могу предположить, что в моём поршне m11,m12 могут различаться либо по причине либо разной сжимаемости, либо вязкости.
FeelUs
1.ОК,3.ОК, давай моделировать при с==1.


2. но моделировать амплитуды синусоидальных сигналов мгновенными величинами (или наоборот) — это какая-то лажа получается.
Я вот думаю, опять во вращательной механике, но где U — F — момент сил, а I — v — угловая скорость, если взять такую конструкцию
то она будет описываться уравнением
это конечно не то, что нужно но уже ближе.
FeelUs
иначе, когда забываешь, что это лажа, начинают возникать вопросы вроде такого
niknamezanat
В целом, я вижу себя не на том уровне, чтобы вести полноценный разбор данных моделей (самоустраняюсь). Во всяком случае мне это даётся с большим трудом. По этой причине, я и пытаюсь сводить к более простым аналогиям. Извините, но механические аналогии для меня ещё более всё усложняют. Я не пытался разбираться с тем, на сколько ваша модель трансформатора соответствует его электрическому оригиналу по этой же причине. А ваша последняя формула взрывает мне мою последнюю извилину.
FeelUs
А вообще — да, я тупанул конкретно.

надо так:
rPman
-
imwode
Да народ считал домашки по теормеху в электрокадах
Вот еще я пытался механику принтера через электротехнику решить
cyberly
На самом деле, системы вентиляции считаются по очень похожему на электрические цепи принципу. Там есть аналог закона Ома для определения расхода воздуха через трубу и аналоги правил Кирхгофа для разруливания потоков через узлы. Вместо напряжения — давление (почему-то часто называется депрессия), вместо тока — расход, а сопротивление так и называется. У вентилятора есть расход-напорная характеристика, получается аналог источника питания с его вольт-амперной характеристикой. Правда, нет никаких емкостей, индуктивностей и полупроводников.
Если я правильно помню, воздух там считается несжимаемым, так что это в принципе то же самое, что было бы с водой. Не знаю, может быть для водопровода/отопления тоже что-то такое есть.