
За прошедшее время робот серьезно изменился. Как и обещал, хочу поделиться доработакми.
Итак, что было сделано:
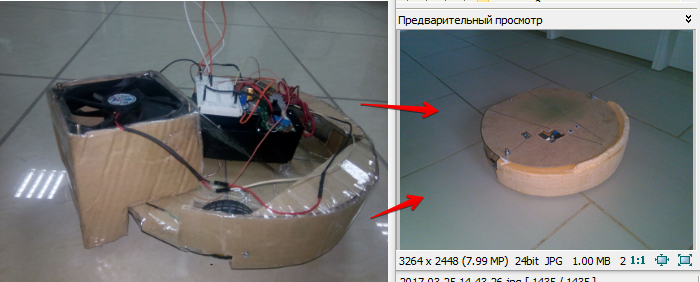
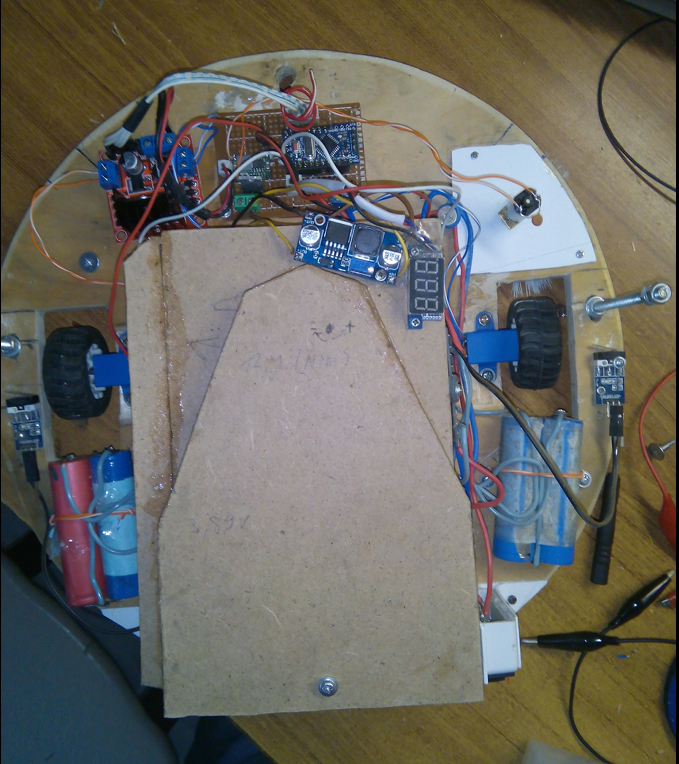
1. Вместо картонного основания теперь круг из фанеры 9мм — это позволило хорошо закреплять все детали робота, используя нормальные шурупы, а не стяжки.
2. Следующим попал под переделку блок пылесоса. Мотор и турбину оставил ту же, но разместил их не «блином», а вынес турбину в переднюю часть корпуса. Такого я у самоделок еще не встречал. Эта хитрость позволила уменьшить высоту пылесоса до 8,5 см и он теперь пролезает даже под некоторые шкафы. Сам же корпус пылесоса собран заново из тонкого ДВП.
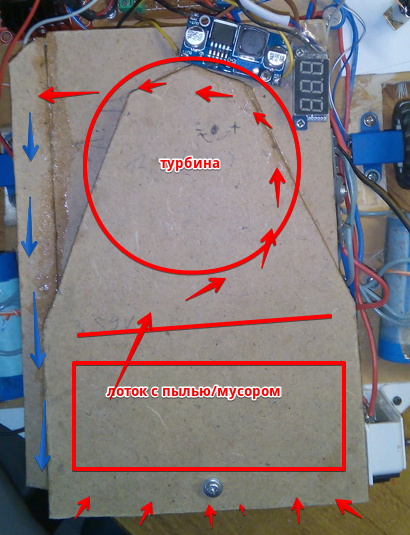
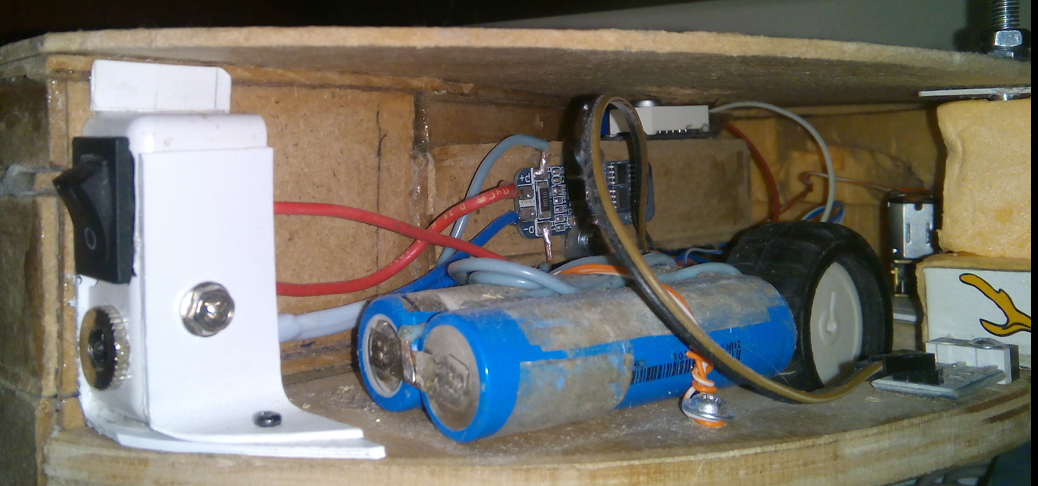
«Отработанный» воздух пришлось выводить за пределы корпуса из-за того, что он даже после фильтра достаточно пыльный, и вся эта пыль выдувалась прямехонько на левый мотор. Также на корпус «временно» повесил плату DC/DC step UP для повышения напряжения питания турбины. Входное напряжение +12V, но этого маловато для уверенного всасывания средней/крупной грязи. При напряжении около +16V тяга уже достаточна. Можно поднять и выше, но тогда и увеличится шумность. Также на корпус пылесоса (опять же «временно») закрепил вольтметр, чтоб примерно определить текущий заряд батарей.
3. Следующими под раздачу попали «желтые» мотор-редукторы. Не подходят они из-за большой шумности. Да и уменьшить скорость хода на этих моторах без потери в крутящем моменте у меня нормально не получилось — робот носился по комнате, пугая кошку )
На просторах интернета наткнулся на маленькие моторы N20, решил использовать их.
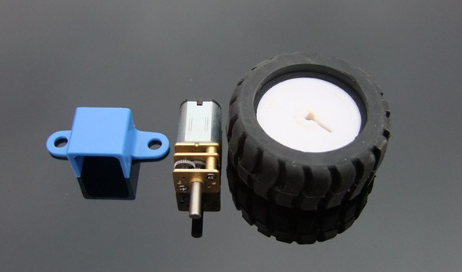
Но с ними приключились 2 неприятности: продавец почему-то прислал мне оба мотора с разным передаточным числом, а при установке их на платформу, они оказались очень шумными, даже хуже, чем те китайские желтые мотор-редукторы. Вероятно шум можно уменьшить, если сделать некий «демпфер» между мотором к корпусом, но я пока остановился на поиске других моторов, хоть с этими робот и перестал носиться по комнатам как угорелый ) Ну и пока проводил эксперименты, спалил маленький контроллер мотор-редукторов, в итоге поставил-таки L298N.
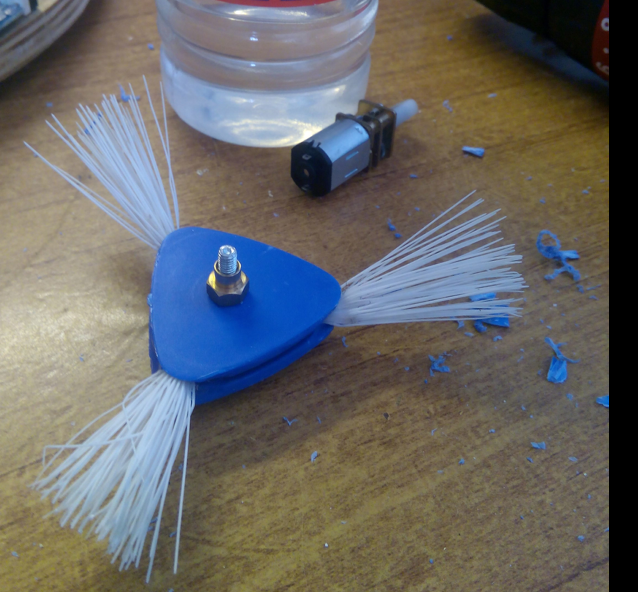
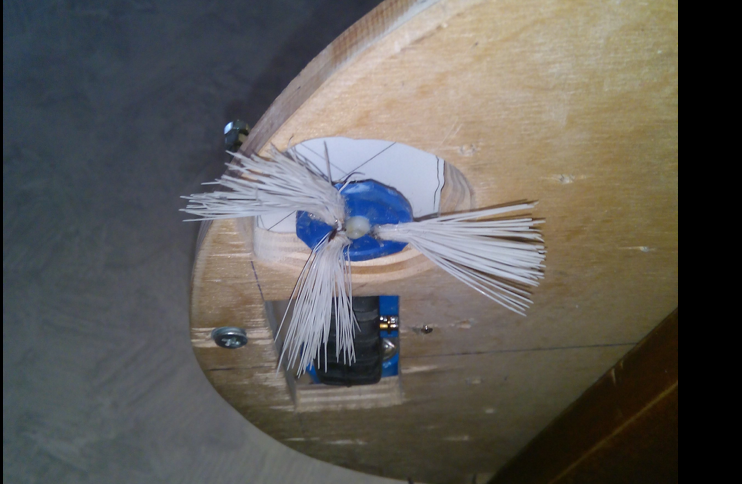
4. В роботе добавился еще один маленький мотор с щеткой. Щетку сделал из подручных средств.
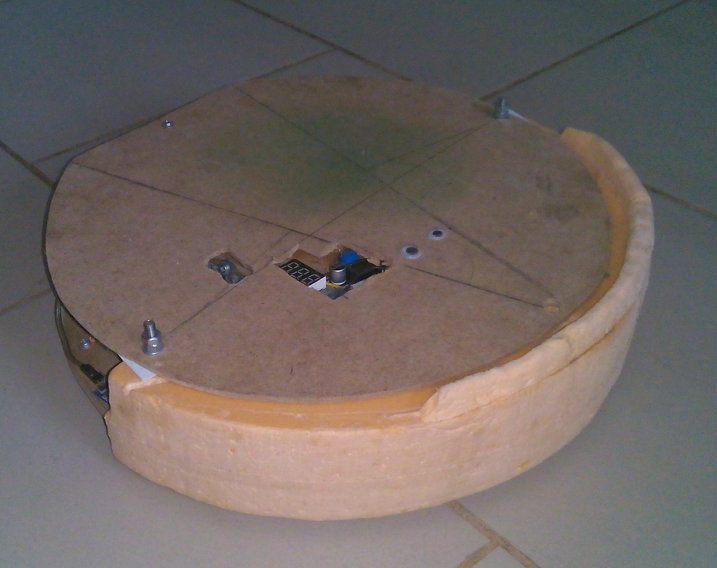
5. Передний бампер. С ним пришлось повозиться, испробовав много разных вариантов. В итоге остановился на пеноплексе

Также в качестве датчиков стенки поставил самые простые концевики. Никаких дополнительных пружинок не понадобилось — кнопочки достаточно упруги, чтоб возвращать бампер обратно после соприкосновения с препятствием.
6. Установлен BMS-контроллер на 3 литиевых банки. Изначально хотел поставить 4, но BMS на 4 банки пришел бракованным, пока, опять же «временно», оставил так

В итоге получился неплохой бюджетный, простой, но очень шумный робот-пылесос.
Если читатели подскажут, какие мотор/редукторы лучше использовать, буду признателен. Нужны нешумные, с питанием 3-12v, примерно 60 оборотов вала в минуту. Спасибо.
Комментарии (66)


Meklon
25.03.2017 17:30+1Могу я ненавязчиво порекомендовать сервисы лазерной резки фанеры?)) А вообще круто)

roversochi
26.03.2017 13:53+5Спасибо, я про них знаю. Но пока не добьюсь более-менее нормального результата в технических характеристиках, украшательствами и красявостями заниматься смысла нет :)

Segmentq
30.03.2017 14:27Смею предположить, что в данном случае эффективность также зависит и от геометрии корпуса. Еще вопрос на счет щетки: Почему не сделаете две щетки по бокам, которые загребали бы в центр? и еще: рассматривали реализацию водяного фильтра?
roversochi
30.03.2017 14:59+1Щеток вообще не было. Поставить вторую не проблема. Проблема с приводом этой щетки. Как я уже писал, моторы N20 внезапно очень шумные. Водяной фильтр ИМХО слишком усложнит конструкцию и потребует обслуживания. Сейчас же все обслуживание сводится к «включил, поймал, выключил, воткнул заряжаться»
:)

Phizio
25.03.2017 18:48+7Да что вы дизайн критикуете Автор, с исполнительными механизмами все понятно, а тема мозгов/прошивок не раскрыта! Или ничего не меняли в сравнении с картонной версией?
roversochi
26.03.2017 14:05+2«Софт» не трогал, только уменьшил ШИМ левого мотора, из-за ошибки китайца, который мне прислал разные моторы.
Мне кажется сначала надо добиться более-менее нормального результата на уровне «железа», а потом уже заниматься дизайном/логикой.
oleg363029
26.03.2017 01:47мотор/редукторы: http://robocraft.ru/shop/index.php?route=product/product&path=64&product_id=225
roversochi
26.03.2017 13:54Да уж, «бюджетненько» :)
Насколько я знаю, в них уже встроен энкодер.
tmin10
26.03.2017 15:13Как обычно, в Китае можно найти дешевле: https://ru.aliexpress.com/item/Right-Wheel-XR510-Robot-Vacuum-Cleaner-Spare-Parts/1000001092357.html.
Также вам можно посмотреть на другие запчасти от промышленных роботов-пылесосов, например щётки, турбины и прочее.

besitzeruf
26.03.2017 01:47-6Сколько времени ушло на все: разработка, ожидания деталей, сборка, тестирование, переделки…? Для безработного человека да, такой пылесос можно назвать бюджетным. Но если учитывать потраченное время на это… Уверяю, он далеко не бюджетный. Просьба не обижаться. Я просто стараюсь оценить все объективно. Лично я нашел на барахолке самые дешевые и внешний видем простые робот-пылесосы (например — SVC 8000, не реклама!), в которых используются оооочень старые микроконтроллеры. Ну и переделываю им железную начинку, добавляя логику (и продолжительное время работы), которых у них нет.
roversochi
26.03.2017 13:57+9Основная цель этой поделки — не получить готовое устройство. Это лишь желаемый результат. Когда я начинал его делать года 3 назад, это был для меня первый опыт работы с ардуиной и вообще с радиоэлектроникой. До этого все ограничивалось пайкой резистор+светодиод. А работая над этим проектом я со временем узнал очень много всего. Так что даже если ничего толкового в итоге не получится, все равно оно стоило того. Как-то так

veydlin
26.03.2017 01:48Я недавно видел робота-пылесоса за 2к, ещё тогда подумал купить и сделать его умней, но в квартире слишком много мест где он будет бесполезен и я передумал
Может вам такой вариант будет предпочтительней? Уже готовый корпус, пылесборник и т.п. бери и модифицируйroversochi
26.03.2017 14:00+1я тоже думал прикупить какой-нибудь поломанный, но когда начинал этот проект — таких днем с огнем было не сыскать. Да и не помню, чтоб тогда были такие девайсы дешевле 5к.
Подскажите ссылку на этого пылесоса за 2к, посмотрю. Но мне посему-то кажется, что это простая «щетка-подметалка» с слабой всасываемостью и дешевым пластиком.veydlin
26.03.2017 14:34Pullman PL-1016
Какая разница, какой он, все равно модифицировать, за каркас более чем пойдетroversochi
27.03.2017 14:42у него судя по видео, тоже проблема с моторами. Логику переделать — не проблема, но с механикой там прям «беда»
ittakir
26.03.2017 07:06-1По моему, делать корпус робота пылесоса оправдано только если хочешь сделать его не простым блином, способным ездить только по ровной поверхности, а что-то типа марсианского ровера, чтобы он мог заезжать на лестницы, преодолевать пороги.
Иначе, гораздо быстрее и дешевле купить какой-нибудь дешевый китайский робот-пылесос, оставить исполнительные механизмы, а управляющую электронику поставить свою.
iig
26.03.2017 09:53+1В дешёвом корпусе может запросто оказаться дешёвый пластик и одноразовая механика.
roversochi
26.03.2017 14:01+3Мне кажется, что в дешевом китайском роботе-пылесосе надо будет менять все :)
askbow
26.03.2017 17:48+1Простите за нескромный вопрос, а зачем у пылесоса глаза? (8>)
roversochi
27.03.2017 07:36+3Дело в том, что до пеноплекса в качестве бампера была немного другая и более хитрая конструкция с подвесками и прочей ерундой. Бампер был узкий и тоже из фанеры. Если смотреть на пылесос сверху, то не понять, где у него перед:) это потом появились «временные» отверстия для вольтметра и усечение задней части крышки. А «глазки» детям понравились, вот и решил пока оставить. Может потом к ним что-нибудь дорисую на радость детворе.

localkost
26.03.2017 19:51Я бы использовал для привода колес дешевые шаговые двигатели 28BYJ-48 вместе с драйвером на UL2003. Шумность нулевая а насчет пластиковых шестеренок в двигателе — время покажет:)
roversochi
26.03.2017 19:57Эти драйверв насколько я помню, требуют по 4 ноги на каждый мотор, хотя можно воспользоваться и более продвинутым контроллером на базе А3967, я как раз себе такой один н пробу заказал. С ними можно будет ограничиться 2 ногами на каждый мотор. Сами же моторы я в своё время «щупал». Чем-то они мне тогда не понравились, кажется слишком маленькой максимальной скоростью. И да, если его жёстко прикрутить к фанерному корпусу, то шуметь скорее всего будет примерно так же, как и n20. Надо этот момент проверить, спасибо, чо напомнили про эти простые моторики :)
Alsmir85
27.03.2017 08:57А если между мотором и фанерой поместить резиновую прокладку, шумов не уменьшится?
roversochi
27.03.2017 09:19немного уменьшится, но через шурупы тоже немало передается вибрации. Моторчик щеток кстати подвешен вообще через кусок пластика, однако шумов это не уменьшило.
roversochi
27.03.2017 09:51Достал 28BYJ, запустил. Шумность действительно у него изумительная. Однако маловата скорость и крутящий момент. Попробую переделать его в биполярник, возможно тогда мотора хватит.

RubyFOX
27.03.2017 09:58Да, нужно в биполярный переделать, дел на 10 минут или даже меньше. Раскрыть, перерезать дорожку, закрыть.
roversochi
27.03.2017 10:37Дорожку перерезал, подключил напрямую к ногам ардуины. Набросал скетч. Вроде крутит немного быстрее, но мощность существенно упала. Предполагаю, что надо все-таки подключить его через L293 с нормальным внешним питанием, а не через ULN2003?
RubyFOX
27.03.2017 10:39Ну я так вообще небольшой 3D-принтер собирал, а там питание через нормальные драйвера шли 4988, питание естественно должно быть с запасом.
roversochi
27.03.2017 10:51Спасибо, я даже не знал про такие драйвера. Похоже, что как раз то, что надо!
А про 3D-принтер я тоже думал, но пока решил мини-станок с ЧПУ сделать. Эти драйвера тоже пригодятся, судя по всему.
k00lagin
27.03.2017 07:28Могу порекомендовать попробовать боковые щётки от Xrobot. Стоят они 20–30 рублей за штуку и, возможно, покажут лучший результат чем самодельные.
green_worm
27.03.2017 12:53+1Вспоминается история, прочитанная давным давно, как в советсткое время собрали пылесос на промышленной турбине и что из этого получилось. =)

eugin_b
27.03.2017 14:37Мне нравится этот проект. Когда купил себе робота-пылесос, то сразу осознал, что он тупой и мозгов ему явно не хватает. Хотелось бы ему встроить более продвинутый мозг, благо что механика есть большей частью готовая. Поэтому в большей степени интересует часть по логике… Но похоже, что до этого у автора еще ОЧЕНЬ далеко…
И мне кажется, что основные проблемы у «моего» робота, что он не может понимать где находится, поэтому может ездить довольно много по одному месту, а где-то не ездить вовсе… Какой-то бы ему внутриквартирный аналог GPS бы придумать…
KamAdm
27.03.2017 15:27Я как-то думал в этом направлении. Мысли были такие:
- Первый вариант: Лазерным дальномером на пылесосе нарисовать комнату и научить нейронную сеть определять местоположение пылесоса, а так же управлять траекторией его движения.
- Второй вариант: Поставить экондеры на колеса, на корпус датчики касания и рисовать трейк перемещения пылесоса. Опять нейронная сеть и управление траекторией.
В обоих случаях требуется комп и беспроводная связь (wi-fi плюс esp8622 на борту пылесоса).roversochi
28.03.2017 09:17Оба варианта не очень надежные. Вариант с лазером самый точный, если их поставить хотя бы два.
С энкодерами в случае прокручивания колеса все показания датчиков можно смело удалять :)
Можно в комнаты повесить камеры, и анализируя изображение, определять текущее положение. Ну опять же, esp тут необходим. Лежит у меня, ждет, пока я с механикой разберусь :)
Еще можно на полу наклеить всяких меток — вместе с энкодерами это неплохой вариант.KamAdm
28.03.2017 10:43Вариант с лазером самый точный, если их поставить хотя бы два.
А зачем два? Одного вполне достаточно. Пылесос крутанулся вокруг оси и снял картинку. Нейронная сеть определила местоположение и задала траекторию движения. Можно в качестве мозгов поставить не ардуино, а малинку — вай-фай и комп не нужны.
eugin_b
28.03.2017 12:57Мне наверное показалось, но лазерный дальномер, технически довольно сложная вещь. Если крутиться вокруг оси, то проскальзывания могут внести погрешность. Тут нужно тогда направлять луч, по методу радара. Не знаю может ли его заменить УЗ датчик. От двух видеокамер, более информативное изображение, но тоже нетривиальное для распознавания. Разработка нейросети тоже довольно ресурсоемкое занятие. У автора вариант с видеокамерой в комнате самый простой. Простота в том, что нужно распознавать не все подряд, а только сам пылесос. Камера видит ИК. И пылесос тоже можно снабдить ИК меткой. Даже просто 4 ИК диода на корпусе, позволят довольно легко распознать расположение пылесоса в комнате, а заодно и его ориентацию в пространстве, если их расположить несимметрично. Под влиянием данного проекта, просмотрел еще несколько самодельных проектов роботов-пылесосов, НО НИ ОДИН ИЗ НИХ не является умным. Все они реализуют довольно простые алгоритмы движения и не являются умней, чем мой покупной. Мой может залезть в какую-то дыру и совершать бесчисленные однотипные итерации, пока не закончится время его работы. Даже в какой-то степени обидно. Потратить кучу сил на разработку девайса, а в результате получить довольно посредственное устройство, тем более, что он не так дорого и стоит…
roversochi
28.03.2017 13:26Я даже видел где-то реализацию идеи с вращением лазерного дальномера. Как бы не среди комментариев к первому посту.
ой может залезть в какую-то дыру и совершать бесчисленные однотипные итерации, пока не закончится время его работы
Это не про моего. Благодаря двум режимам работы и рандомным углом поворота в первом режиме, он на одном месте долго не застревает. Без всяких сложных вычислений и нейросетей :) Правда и «умным» его назвать пока никак не получается. Но, как я уже писал в ответе на другие комментарии, сначала нужно разобраться с «железом».
KamAdm
28.03.2017 15:54Не знаю может ли его заменить УЗ датчик.
Дальность маловата.
PS Почему все время делаю упор на нейронную сеть — мне кажется она лучше справиться с ориентаций при изменения ландшафта, то бишь стульев и других предметов на полу без четкой привязки к месту

Vsevo10d
27.03.2017 16:24+1Хотел что-то прокомментировать.
Потом прочел первую статью, сглотнул и изменил решение: автор, это большой прогресс в конструкции и навыках прототипирования, так держать!
Если бы я прочитал первую статью в день выхода, я бы сегодня вздохнул с облегчением: автор жив, не спалил кулеры напряжением 18 В, превратив свой робот в картонное передвижное кострище, поджигающее всю мебель и занавески по пути.
sim31r
28.03.2017 00:36Предохранитель на 0.25 ампера защитит куллеры от возгорания. Более мощные предохранители желательны и для остальных цепей.
roversochi
28.03.2017 09:07+1Спасибо за комментарий.
Кулер я предварительно гонял довольно долго просто «на столе», периодически проверяя температуру и обороты. Ничего критичного не обранужил. При увеличении напруги примерно до 20 вольт у него срабатывает защита.
После таких тестов он у меня пару месяцев катался под наблюдением в офисе на полу из плитки. Да и сейчас пускаю его только, когда дома кто-то есть. Но про предохранители после вашего и sim31r сообщения я подумаю, спасибо. Вероятно установлю их прям на выходе из платы зарядки, надо только правильно расчитать номинал.

ZaitsXL
27.03.2017 22:26так а все таки насколько хорошо он пылесосит? или целью была сама разработка такого вот аппарата? насколько слышал даже в промышленных моделях за кучу денег не все хорошо с этим
roversochi
28.03.2017 09:12В том-то и дело, что пылесосит он реально очень круто. С боковой щеткой теперь еще и выметает с углов. До сих пор никак не привыкну к куче грязи/пыли, которая внезапно собирается с вроде бы чистого пола. На ворсистом ковре конечно он застрянет, надо доделать заднюю часть. Но и задачи такой не стояло.
Проблема только с шумностью приводов. Даже сама турбина не сильно шумит, а приводы колес — это прям беда какая-то…EchoStan
28.03.2017 14:54А ты не хочешь поставить очень простые энкодеры или холлы и динамически ШИМ-ить колёса под конкретную скорость? Типа «наехал на ковёр — добавил мощности. Реализуется почти на любых моторах, но могу всплыть области повышенного нагрева ключей на кривой частоты ШИМ
roversochi
28.03.2017 14:56Я сначала хочу найти подходящие моторы, у которых будет этот самый «запас» мощности, и при этом чтоб они были тихими и дешевыми :)
EchoStan
28.03.2017 14:59Если штука едздит быстро, значит и медленно может ехать) эти просто очень быстро крутятся? через ШИМ управляешь?
roversochi
28.03.2017 15:09Вместе со скоростью теряется и крутящий момент, так что медленно она может ехать очень плохо. Да и в таком режиме начинают проявляться отличия моторчиков. Например при напруге в 6 вольт они оба крутятся вроде бы одинаково, а вот при ШИМ на 3 вольта, уже есть отличия. А например при 2 вольт один мотор вообще уже не справляется.
EchoStan
28.03.2017 15:17Эмм, я ШИМ на ардуино всегда измерял в соотношении времени, когда транзистор открыт ко времени, когда он закрыт (0..255/255 временного интервала). Прежде чем менять моторы, обязательно попробуй такую схему:
100мс analogWrite=90
100мс analogWrite=255
100мс analogWrite=90
100мс analogWrite=255
и т.д.
только убедись, что транзисторы чувствуют себя хорошоroversochi
28.03.2017 15:26+1пробовал. Еще пару лет назад. И сейчас когда подбирал скорость разных моторов.
С тарнзисторами проблем не должно быть, ибо на плате H-моста стоит радиатор.
Но проблема в том, что при изменении скважности, также меняется скорость и тяга, что логично.EchoStan
28.03.2017 15:28Да, это так — идея в том, чтобы обеспечить приемлемые «всплески» тяги, не развивая большую скорость при этом
roversochi
28.03.2017 15:30Вооот. С теми моторами, которые у меня на руках, такое сделать у меня не получилось. Да и шумные они все, гады
EchoStan
28.03.2017 15:32странно, слишком уж нелинейная кривая получается. это точно не высокооборотистые двс?
eugin_b
28.03.2017 15:59А такие подойдут?
https://www.aliexpress.com/item/Powerful-Engine-JGB37-3530-12V-DC-Reversible-High-torque-Metal-37mm-Gearbox-Gearmotor/32667405760.html?spm=2114.01010208.3.84.151Jpf&ws_ab_test=searchweb0_0,searchweb201602_2_10065_10068_10136_10137_10060_10138_10062_10141_10056_10055_10054_301_10059_10099_10103_10102_10096_120_10144_10052_10053_10142_10107_10050_10143_10051_10526_10529_10084_10083_10119_10080_10082_10081_10110_10111_10112_10113_10114_10037_10517_10078_10079_10077_10073_10070_10122_10123_10120_10124,searchweb201603_1,afswitch_1_afChannel,ppcSwitch_2,single_sort_0_default&btsid=7561f0d9-221a-4215-be0e-5ebb53401033&algo_expid=fd4de230-840d-4244-95b3-63675ec64904-10&algo_pvid=fd4de230-840d-4244-95b3-63675ec64904
там есть на 60 об/мин и н 12в., как вы заказывали
Oxygen99
29.03.2017 10:34+1Да, это, конечно, бюджетно. Но все равно круто! Надо будет жене как-нибудь нечто похожее изготовить)
MrRitm
29.03.2017 11:59+1Очень люблю подобные статьи. Интересно. Только не совсем понятно, какую цель приследовал Автор? Если для саморазвития или решения каких-то задач которые не решает робот продающийся в магазине за 10-15к, то не понял какие именно? А если была задача сэкономить и получить аналогичную «магазинной» версии функциональность, так ту вроде экономией не очень пахнет…

Cyl
31.03.2017 15:15Пересмотрел тонны материалов пылесборщиков, странная тенденция, все разработчики почему то возлагают навигацию на взаимодействие с сенсорикой и никто не задумался в сторону навигационных технологий в закрытых помещениях с применением картографии и колес Нила и. Посмотрите на Robots — KUKA https://www.youtube.com/watch?v=kN9a7W_hnSQ
Psychosynthesis
У меня боль в глазах, не могу камментить…
old_bear
это вы ещё первую статью не видели…