
Veterobot — это небольшой робот-вездеход, особенность которого в открытости технологии изготовления и программного обеспечения.

Небольшой, аккуратный робот буквально напичкан сенсорами и имеет достаточно мощный процессорный блок. Ядром последнего является бортовой компьютер BeagleBoard-xM. Это открытая система с процессором ARM производства фирмы Texas Instruments. Его мощности хватает для управления периферией, выполнения сложных алгоритмов и даже сжатия видео в формат H-264 в реальном времени (с использованием DSP). Последнее очень даже необходимо в виду того, что на борту аппарата имеется две видеокамеры, которые можно использовать для контроля движения.
Вообще в начинке робота изначально уже имеется четыре ультразвуковых дальномера, цифровой компас, GPS и видеокамеры. Управление может выполняться через WLAN или 3G (пока в тестовом режиме), а также имеется возможность удаленного управления роботом через сеть Интернет (для этого как раз и понадобятся бортовые камеры).
Все компоненты аппарата открыты и доступны для всех желающих. Поэтому возможности данного робота ограничиваются только фантазией пользователя.
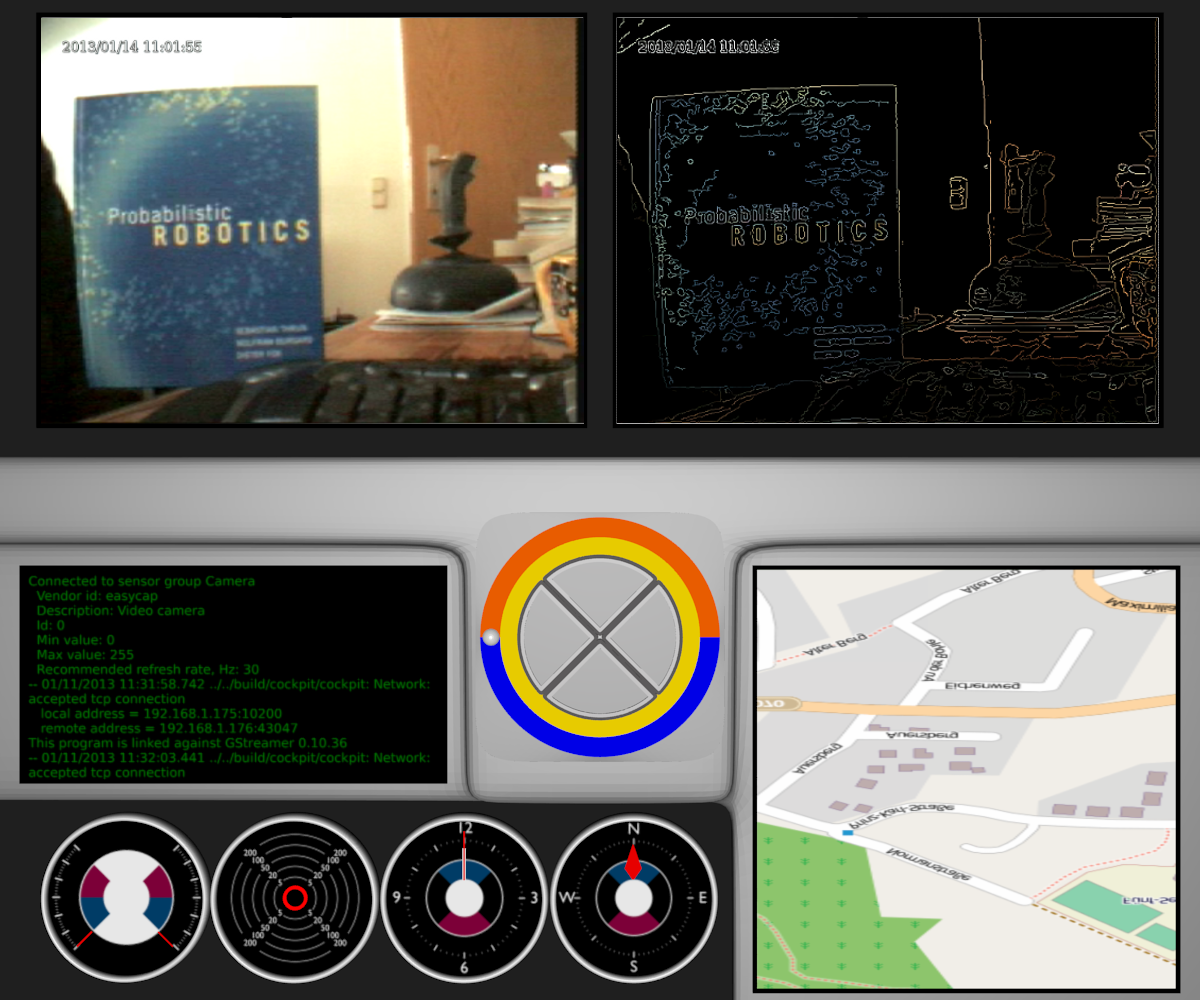
Программная начинка робота состоит из смеси Angstrom Linux, Xenomai, ZeroC's Ice и прочих компонентов. Также в комплекте идет специальная программа, позволяющая управлять аппаратом и контролировать показания сенсоров. Ее рабочее окно на скриншоте ниже.
Для создания корпуса Veterobot`а применяется технология трехмерной печати, а сами модели были выполнены в программе Blender. Исключение составляет готовое шасси Dagu Rover 5, которое оснащено двумя моторами с датчиками угла поворота. Но, вероятно, что к аппарату могут быть присоединены другие комплектующие. По крайне мере, в 3D презентации робота есть возможность смены шасси, хотя на сайте упоминания об этом я не встретил. Само приложение также было сделано с помощью свободного 3D движка Blend4Web (презентация открывается в веб-браузере и использует WebGL), а исходники находятся в общем пуле проекта.

В итоге, получился интересный аппарат, который может понравиться исследователям или энтузиастам роботехники. Хотя стоимость устройства достаточно велика, но его составляющие, схемы, 3D модели и прочее доступно для скачивания в репозитории git-hub, а на самом сайте есть инструкция для самостоятельной сборки.
P.S. К разработчикам устройства автор статьи не имеет никакого отношения.
Комментарии (9)

MaxAlekseev
02.08.2017 19:34+2Исключение составляет готовое шасси Dagu Rover 5
Весьма посредственное шасси, со временем резиновые гусеницы растягиваются и слетают с катков при малейшем повороте. Если вместо гусениц на катки одеть шины (конструктивно шасси универсальное), тогда очень быстро мрут пластиковые редуктора при тех же танковых разворотах.CreFroD
03.08.2017 15:54Да, согласен, шасси ужасно. Я сейчас строю Wild робота, не могли бы вы посоветовать шасси с хорошей проходимости с вменяемой стоимостью (до 200€)?

merl1n
02.08.2017 22:27Делал похожий вездеход.
http://privateblog.info/lego-vezdexod-s-video-i-bluetooth/
Проблем при создании возникает уйма, можно же было хоть что-то описать.


Stiger_slan
03.08.2017 13:08Экспериментировал с этим же шасси. С очень похожей конфигурацией.
Во втором релизе пришлось поднимать камеру максимально выше, и делать её поворотной.
— Низкая установка катастрофически уменьшала обзор в природных(!) условиях.
— Про поворотность — крутить весь корпус что-бы осмотреться на местности — тоже нерационально.
slovak
03.08.2017 14:08Да уж, расположение камеры ниже ультрасоников — это провал.
Не удивлен, что проект не развивается.

igorkozinov
03.08.2017 17:12Вот по-че-му ро-бот Вер-тер так мед-лен-но го-во-рил и дви-гал-ся…
Ха…
Ха…
Ха…
vasimv
Ограниченная слишком платформа. Поиграться только, более мощное шасси не сделать — драйвера моторов слабенькие, выводов GPIO свободных мало остается для чего-то дополнительно, не продуманы даже такие вопросы, как замер напряжения батареи и ее аварийное отключение для предотвращения переразряда. Ну и линейный регулятор для питания beagleboard (не слишком ли дороговато, для игрушки?) означает то, что батарея будет разряжаться очень быстро, даже если робот просто стоит.