
Современные системы магнитной левитации находят всё более и более широкое применение: высокоскоростные пассажирские поезда, изоляция чувствительных к вибрациям механизмов, магнитные подшипники, левитация расплавленного металла в индукционных печах, а также левитирование металлических заготовок. В последнее время эффект магнитной левитации также используют в бытовых устройствах.

Наиболее значимое применение, пожалуй, нашлось в поездах с системой левитации на сверхпроводниках. И это обусловлено такими преимуществами, как большая надёжность (из-за отсутствия трения), относительно низкое энергопотребление, способность развить большую скорость.
Однако из-за нелинейных уравнений движения объекта, описывающих его динамику, сложно воспроизводить процесс управления объектом. Речь пойдёт именно про положение (расстояние) объекта относительно нулевой отметки.
Если коротко, то магнитная левитация – это устойчивое положение объекта на определенном расстоянии в гравитационном поле, когда, как правило, ускорение свободного падения компенсируется ускорением объекта, которое создаётся магнитным полем. При этом возникает подъёмная сила.
Магнитная левитация реализуется с помощью диамагнетиков, систем вихревых токов и сверхпроводников, а также с помощью сервомеханизмов.
В текущем материале (под катом) будет рассмотрено модальное управление для линеаризованной системы магнитной левитации, а также реализация модального управления для нелинейной модели системы.
Математическая модель
Рассмотрим простую схему магнитной левитации.
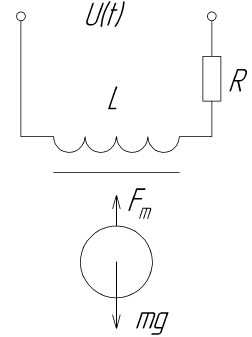
На данной схеме приведён электромагнит, который взаимодействует с магнитным полем объекта управления, который представляет собой шарик-постоянный магнит. Через изменение силы притяжения электромагнита и будет достигаться эффект левитации.
В выпускной работе рассматривался объект второго порядка, где в вектор состояния не был включён один важный компонент — ток в катушке. На этот раз данная компонента будет введена в рассмотрение.
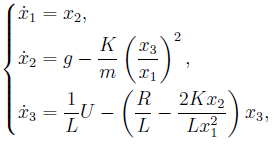
где — положение объекта;
— скорость изменения положения объекта;
— ускорение свободного падения;
— константа;
— масса объекта-шарика;
— ток в катушке;
— индуктивность катушки;
— входное напряжение;
— активное сопротивление катушки.
Значения некоторых приведённых выше переменных сведены в таблицу.
| K | m, кг | L, Гн | R, Ом |
| — | -------| ------|--------|
|0.000659|0.0106|0.109|31.3|
Чтобы получить линейную модель, следует провести линеаризацию системы уравнений.
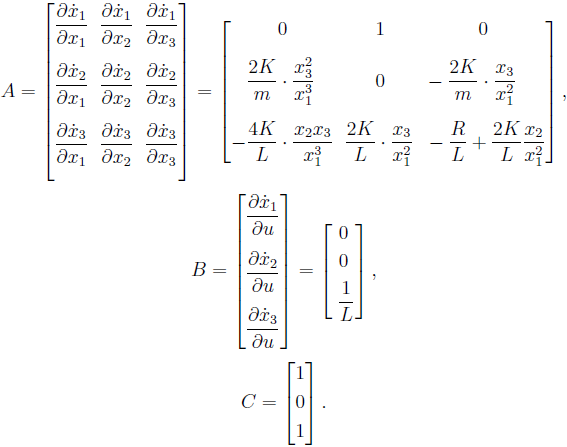
Вид матрицы можно обосновать тем, что рассмотрению подвержены такие переменные вектора состояния, как положение () и ток ().
В таком виде полученные матрицы всё ещё не годятся для моделирования. Для этого зададимся начальными условиями.
Подставим теперь полученные данные и для нахождения значения входного сигнала в начальный момент времени:
Моделирование
Теперь можно синтезировать управление. Для исследований был выбран пакет Matlab. Ниже приведён код получения коэффициентов регулятора по состоянию:
matlab
g = 9.81;
K = 0.659*10^-3;
m = 0.0106;
L = 0.109;
R = 31.1;
x10 = 0.005;
x20 = 0;
x30 = sqrt(g*m/K)*x10;
u = R*x30;
A = [0 1 0;
2*K*x30^2/(m*x10^3) 0 -2*K*x30/(m*x10^2);
-4*K*x20*x30/(L*x10^3) 2*K*x30/(L*x10^2) -R/L+2*K*x20/(L*x10^2)];
B = [0; 0; 1/L];
C = [1 0 0];
W = ctrb(A, B); % Матрица управляемости
detW = det(W);
poles = [-10 -10 -10]; % Полюса
K = acker(A, B, poles); % Регулятор
system = ss(A - B*K, B, C, 0); % Сборка модели
figure(1)
step(system) % тестовое воздействие
km = 1/dcgain(system); % масштабирующий коэффициент
system_m = ss(A - B*K, B*km, C, 0);
figure(2)
step(system_m)Чтобы понять, можно ли синтезировать управление для полученной системы, нужно знать матрицу управляемости, по определителю которой и делается вывод:
matlab
>> detW
detW =
-7.5351e+07Определитель отличен от нуля, следовательно, линеаризованная система управляема.
Вектор poles — это вектор, который содержит в себе желаемые полюса линеаризованной системы магнитной левитации.
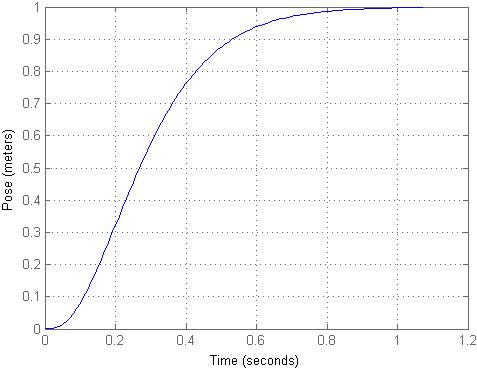
При подаче тестового воздействия в виде единичной ступеньки получаем следующий результат:
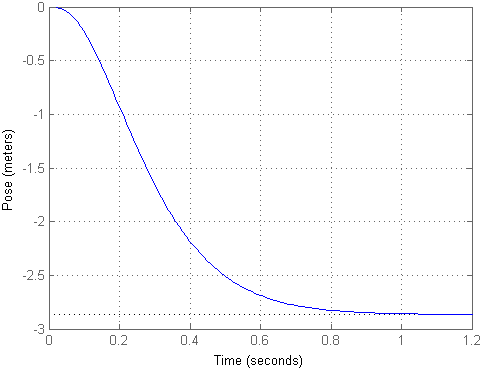
Как видно, получается, что объект улетел на довольно большое расстояние при небольшом воздействии, хотя и остался в одном положении. Чтобы вход соответствовал выходу, можно подсчитать масштабирующий коэффициент km и домножить на него входной сигнал, что и реализовалось во второй модели. Тогда переходный процесс будет выглядеть следующим образом:
Получающееся положение всё равно велико для подобной установки. Пока оставим без внимания ток и перейдём непосредственно к моделям Simulink, где рассмотрим оставшиеся вещи.
Масштабируем входной сигнал так, чтобы выходные значения было удобно представлять в сантиметрах. Подадим на вход несколько тестовых воздействий, чтобы проверить, как выглядят переходные процессы в системе, а также протекающий ток.
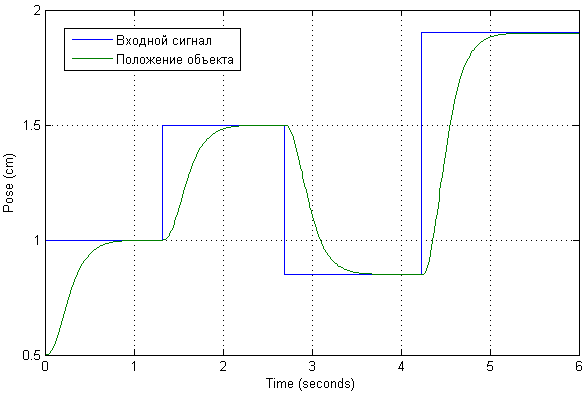
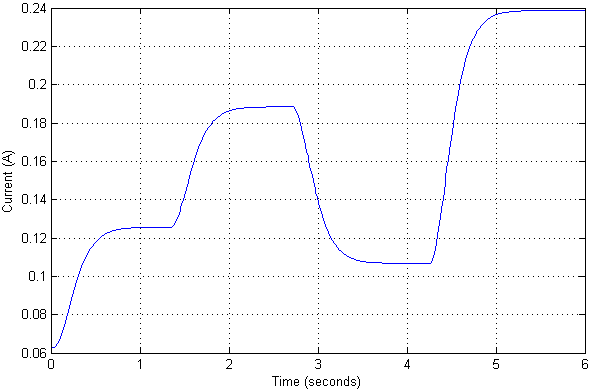
Получается, что величина тока при таких положениях объекта не столь значительна. Сами переходные процессы по положению имеют апериодический характер, без перерегулирования и статической ошибки. Собственно, так и было задано желаемыми полюсами скорректированной системы.
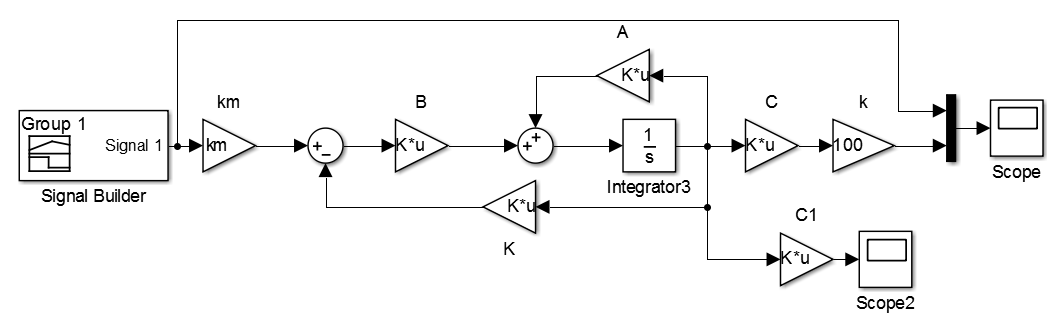
Однако это приближение в рабочей точке может некорректно сработать с исходной нелинейной моделью. Проверим это. Нелинейная модель системы с подключённым регулятором приведена ниже.

Это уже окончательный вариант, оставленный после всех экспериментов. Были установлены ограничения на входное напряжение (0-12В) и само положение объекта (0-4см). Вторая составляющая регулятора была исключена, поскольку с ней переходный процесс был неустойчив:

После изменений в схеме переходные процессы теперь выглядят так:
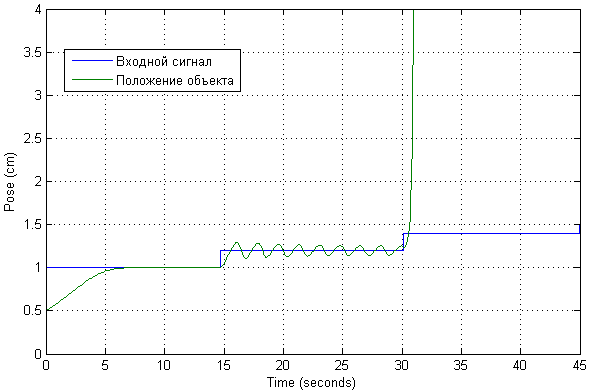
Был сразу проверен возможный диапазон работы такой системы. Можно увидеть, что нужное положение будет достигаться при незначительных отклонениях от начальной точки. При этом возможно проявление существенной колебательности.
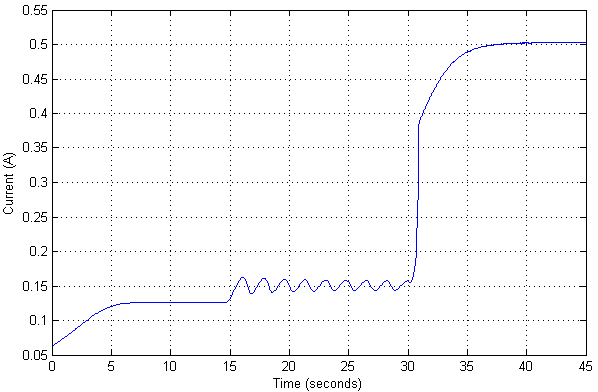
При этом величина тока выглядит следующим образом:
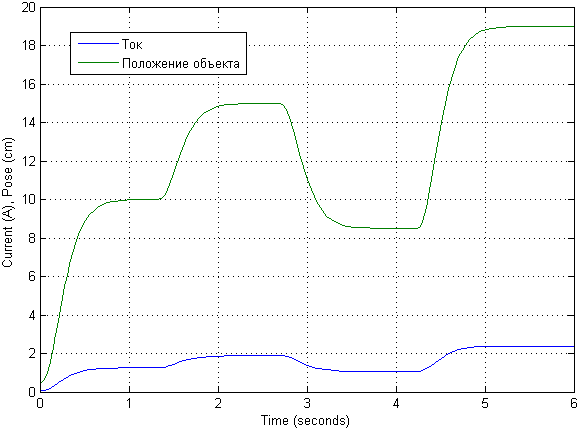
Раз уже была проверка для нелинейной модели объекта, то можно и взглянуть, каким может быть максимальное значения положения для объекта, при котором он ещё не теряет устойчивости.
Проведя моделирование с разными входными сигналами, было замечено, что у линеаризованной модели всё очень даже хорошо. Так что здесь будут продемонстрированы переходные процессы по изначальному входному сигналу, увеличенному в 10 раз.
Сама математическая модель могла бы выглядеть несколько иначе. Её описание взято из описания математической [модели](http://www.ijens.org/Vol_13_I_01/136801-4747-IJECS-IJENS.pdf).
Заключение
Модальное управление для нелинейного объекта совсем не годится для каких-либо практических нужд. Следует рассмотреть иные реализации для данной системы магнитной левитации.
По части бакалаврской работы автором была реализована простенькая установка по левитации, о которой будет отдельно расписано в дальнейшем.
Комментарии (9)

Umpiro
15.08.2019 16:45+1Автор упоминает 'модальное управление' только во введении и заключении статьи. Отсюда, собственно, непонятно что это такое, и когда мы перешли к его рассмотрению в основной части.

kap2fox
15.08.2019 21:52Посмотрите вот эту публикацию. Здесь в конце статьи habr.com/ru/post/193272 используется формула Аккермана. Это тоже самое управление модами или просто решение представленных уравнений, чтобы параметры (координаты и ток) системы сходились к желаемому значению.
kap2fox
15.08.2019 21:58AlexEra не готов согласиться с вашим выводом.
Модальное управление для нелинейного объекта совсем не годится для каких-либо практических нужд.
Много примеров, когда нелинейные системы в определенной точке линеаризуются и могут быть стабилизированы модальным управлением. Отельным вопросом становится выбор желаемых характеристик системы. Мы таким методом стабилизировали сигвеи, маятники на тележке и маятники Фуруты.
Daddy_Cool
16.08.2019 00:15Прочитал статью, не удержусь от легкой критики/обратной связи. )
1. Хабр все же популярный ресурс, хорошо бы дать больше инфы про саму суть магнитной левитации — откуда берутся эти магические магнитные силы, как-почему-куда они направлены и т.п…
2. Откуда взялись именно эти уравнения? Расчет переменных магнитных полей — та еще задача, а уравнения выглядят простенько, т.е. очевидно введены некоторые допущения — какие и почему их можно считать корректными?
3. Часть с линеаризацией — не вполне понятно, решается таки исходная система или упрощенная линейная?
4. Вывод «Модальное управление для нелинейного объекта совсем не годится для каких-либо практических нужд» — из чего именно он следует? Я вот, что-то смыслю в магнитных полях, но не сталкивался с управлением — хочется более подробного объяснения.
5. Автор написал, что установка создана — что показало сравнение с экспериментом?
6. «Материал создаётся в качестве первоначального задела под возможную магистерскую диссертацию по той же тематике». В чем новизна (и предполагается ли она), учитывая, что поезда-маглевы пытаются бегать аж с 1979 года?
Автору всяческих успехов!
Exchan-ge
Когда-то в детстве (60-тые) в одной научно- популярной книге прочел про то, что магнитная левитация типа той, что на КДПВ, в принципе невозможна (с объяснением причин ее невозможности).
С тех пор, читая статьи на эту тему — испытываю когнитивный диссонанс.
strelok369
Не удержался (долго и очень издали наблюдал за одним проектом подвеса, консультировал чуть-чуть), поэтому отвечу (покапитаню немного, просьба сильно не бить).
Не возможна левитация в статичной конфигурации зарядов (электростатика) или магнитов (без сильных диамагнетиков, например сверхпроводников). Об этом говорит теорема Ирншоу, даже не спрашивайте как, сам плохо ее понимаю (мне всегда было важно только её следствие). Мы можем обойти это ограничение сделав систему либо не статичной (как САУ, управляющая полем электромагнита, описанная в этой статье) либо вводя силы иной природы (как упор оси в мендосинском моторе или гироскопический момент в левитроне).
Exchan-ge
Точно, в той книге приводился опыт «Гроб Магомета» с левитаций над поверхностью сверхпроводника.
В этой теме разбирается не так много народа… немного науч-попа не помешает )
Для меня это — темный лес )
В общем, это единственное, что я понял в этой теме.
legolegs
В сети полно видео с мендосинскими моторами, это очень простая конструкция. Самое сложное в его постройке — это смириться с необходимостью этого самого упора.
Exchan-ge
Глянул по простому, в вики: «с одной или двух сторон ось опирается на стенку».
Формулировка, мягко, говоря неясная.
По крайней мере для меня, инженера-механика в прошлом )
Порылся в поисковой системе по словам «кинематическая схема мендосинского мотора», пока ничего не нашел.
(Плюс похоже на то, что мендосинский мотор — это вещь в себе, учебное пособие для кабинета физики, так как подключить к нему полезную нагрузку, мне кажется, нельзя )