
Привет, Хабр!
Вот уже несколько лет все свои проекты для линейки микроконтроллеров stm32 я делаю на C++.
За это время у меня накопилось некоторое количество материала, который может быть интересен другим разработчикам.
Во избежание лишних вопросов: я использую связку QtCreator+gcc+gdb+openocd. Как с ней работать, описано многократно, поэтому не буду на этом останавливаться, а вот о своих подходах к работе с микроконтроллерами расскажу подробнее.
На нижнем уровне проекта, как правило, находятся драйвера периферии. С них и начнём.
Я стараюсь, по возможности, не связываться с монстрами вроде SPL, HAL и, прости господи, CubeMX, разве что допиливая за деньги чужие проекты. Сама идеология фреймворка "как для больших машин", на мой взгляд, там порочна. Задуманные гибкими и удобными в использовании (хотя кто-то и поспорит с этим) функции превращаются в достаточно большой и неоптимальный машинный код, где многие лишние операции выполняются на микроконтроллере в рантайме. Да, современные контроллеры мощны, но компьютер, на котором мы собираем проект гораздо мощнее, поэтому пусть он всё и делает.
Я определил для себя основные требования к реализации управления периферией:
- все константные выражения должны быть вычислены на этапе компиляции и попадать в машинный код уже в виде чисел;
- компилятор должен выполнять львиную долю работы, а также контролировать передаваемые функциям типы;
- макросы
не нужныдолжны использоваться минимально, там где это не приведёт к ослаблению контроля типов; - программный интерфейс реализации должен поддерживать удобочитаемость кода.
Наверное, только ленивый не придумывал свой велосипед для работы с полями регистров. Это и сдвиг плюс логические операции а-ля CMSIS, и всяческие макросы, скрывающие эти же операции в своих запутанных недрах и хтонь в стиле библиотек от ST. Одно время я даже работал через битовые поля, пока, наконец, не придумал решение, с которым и хочу ознакомить вас.
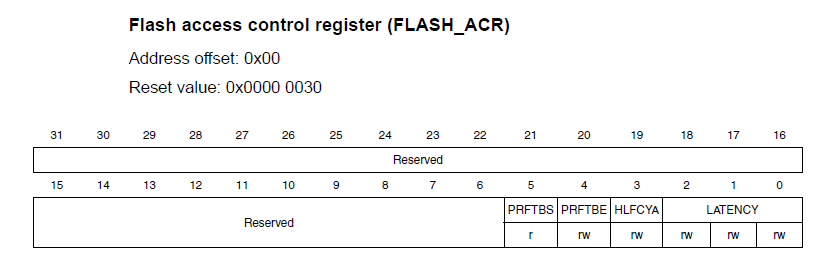
Здесь и далее в качестве примера буду использовать так любимый китайцами STM32f103 и его Flash access control register, который там один, поэтому пример будет простым и коротким.
Сконфигурируем flash средствами CMSIS для работы ядра на 72МГц:
FLASH->ACR = (FLASH->ACR &
(~(FLASH_ACR_LATENCY_Msk
| FLASH_ACR_PRFTBE_Msk ))) // Плохо читаемое обнуление полей
| FLASH_ACR_LATENCY_1 // Сразу не скажешь, сколько это и чего
| FLASH_ACR_PRFTBE;Не очень наглядно, не находите? Если через пару недель понадобится изменить код, придётся лезть в даташит и по-новому разбираться, где, что и как. Или писать везде подробные комментарии. Тем не менее, плюсом данного подхода является то, что сгенерированный машинный код очень компактный:
0x80001ec 04 4a ldr r2, [pc, #16] ; (0x8000200 <main()+20>)
0x80001ee <+ 2> 13 68 ldr r3, [r2, #0]
0x80001f0 <+ 4> 23 f0 17 03 bic.w r3, r3, #23
0x80001f4 <+ 8> 43 f0 12 03 orr.w r3, r3, #18
0x80001f8 <+ 12> 13 60 str r3, [r2, #0]Как видим, всё по классике: чтение-модификация-запись. Можно ли получить такой код из более понятного программного текста?
Можно. В этом нам помогут шаблоны и метапрограммирование.
Прежде всего, необходимо сделать описание периферии. В моей концепции набор регистров каждого периферийного устройства представляет собой структуру. Для flash с его одним регистром это будет выглядеть так:
struct Regs {
uint32_t ACR;
// Здесь могли бы быть ещё регистры
};Для описания полей регистра используется следующее:
struct ACR {
constexpr static uint8_t LATENCY[]{ 0, 3 };
constexpr static uint8_t HLFCYA[]{ 3, 1 };
constexpr static uint8_t PRFTBE[]{ 4, 1 };
constexpr static uint8_t PRFTBS[]{ 5, 1 };
}; Здесь первое число в каждом массиве — это смещение поля, а второе — его длина. Для автоматического получения подобных структур на Python на коленке был написан парсер SVD файлов.
Для чтения и записи необходимо иметь адрес, по которому находится нужный регистр. Для этого используется constexpr выражение и функция:
constexpr static uint32_t base = 0x40022000; // Базовый адрес периферийного устройства
INLINE constexpr static volatile Regs* rg()
{
return reinterpret_cast<volatile Regs*>(base);
}Здесь base задаётся отдельным выражением, потому что в некоторых случаях (если, например, у нас несколько одинаковых устройств, например, таймеров) оно может быть и параметром шаблона. Об этом я расскажу в других статьях.
Макрос INLINE определён как
#ifndef INLINE
#define INLINE __attribute__((__always_inline__)) inline
#endifЭто как раз тот случай, когда макрос оправдан. Запись становится более короткой, а в дальнейшем, при использовании компилятора отличного от gcc его можно будет условно переопределить.
Функция конфигурирования flash выглядит следующим образом:
INLINE static void setLatency(Flash::Latency latency, bool prefetchBufferEnable = false)
{
setRegister(rg()->ACR,
ACR::LATENCY, static_cast<uint8_t>(latency),
ACR::PRFTBE, prefetchBufferEnable
);
}На мой взгляд, всё достаточно удобочитаемо: как сам интерфейс функции, так и её код. Входное значение latency жёстко типизировано, попытка записать туда произвольное число приведёт к ошибке. Приведение типа static_cast<uint8_t>(latency) обязательно, иначе компилятор будет ругаться, несмотря на то, что Latency объявлено как:
enum class Latency : uint8_t {
zeroWaitState = 0b000,
oneWaitState = 0b001,
twoWaitStates = 0b010
};Вызов функции вида
Flash::setLatency(Flash::Latency::twoWaitStates, true);компилируется в следующий машинный код:
0x80001ec 04 4a ldr r2, [pc, #16] ; (0x8000200 <main()+20>)
0x80001ee <+ 2> 13 68 ldr r3, [r2, #0]
0x80001f0 <+ 4> 23 f0 17 03 bic.w r3, r3, #23
0x80001f4 <+ 8> 43 f0 12 03 orr.w r3, r3, #18
0x80001f8 <+ 12> 13 60 str r3, [r2, #0]Попробуйте найти отличие от реализации на CMSIS: всё происходит за один цикл чтения-модификации-записи, причём все константы вычисляются на этапе компиляции.
Какими средствами это достигается? Добро пожаловать под капот функции setRegister. Выглядит она следующим образом:
template<typename T, typename V, typename... Args>
INLINE constexpr static void setRegister(volatile uint32_t& reg,
const T field,
const V value,
const Args... args)
{
uint32_t mask = setMaskR(field, value, args...);
uint32_t val = setBitsR(field, value, args...);
reg = (reg & (~mask)) | val;
}Ей передаётся ссылка на регистр (число uint32_t) и произвольное количество пар поле — значение. Далее при помощи вспомогательных функций конструируется маска для обнуления полей и число для записи в них.
Вспомогательные функции имеют вид:
template<typename V, typename T>
INLINE constexpr static uint32_t setBitsR(T field, V val)
{
return (val << (field[0]));
}
template<typename V, typename T, typename... Args>
INLINE constexpr static uint32_t setBitsR(T field, V val, Args... args)
{
return (val << (field[0])) | setBitsR(args...);
}
template<typename V, typename T>
INLINE constexpr static uint32_t setMaskR(T field, V val)
{
return ((((1 << field[1]) - 1) << field[0]));
}
template<typename V, typename T, typename... Args>
INLINE constexpr static uint32_t setMaskR(T field, V val, Args... args)
{
return ((((1 << field[1]) - 1) << field[0])) | setMaskR(args...);
}Эти функции при компиляции рекурсивно "собирают" маску и значение из отдельных полей. "Шаблонная магия" уже многократно была описана во многих источниках, поэтому, если вы не знаете, как это работает, почитайте о ней, например, у того же Александреску.
Зачем используются вспомогательные функции и почему сразу не написать рекурсивную функцию setRegister? Я сначала так и сделал и получил очень неприятный эффект. Предположим, нам нужно подёргать туда-сюда какой-то бит — типичная задача при программировании микроконтроллеров. Однако, компилятор умный, он видит, что мы последовательно меняем одно и то же значение, и как бы мы его не отмечали как volatile, он оставляет только операцию, выполняющую последнюю модификацию. К сожалению, код такой реализации у меня не сохранился, поэтому прошу поверить мне на слово или попробовать проверить это самостоятельно.
В моей текущей реализации этот эффект отсутствует. В этом можно убедиться:
Flash::setLatency(Flash::Latency::twoWaitStates, true);
Flash::setLatency(Flash::Latency::oneWaitState, true);компилируется в два цикла чтение-модификация-запись:
0x80001ec 07 4a ldr r2, [pc, #28] ; (0x800020c <main()+32>)
0x80001ee <+ 2> 13 68 ldr r3, [r2, #0]
0x80001f0 <+ 4> 23 f0 17 03 bic.w r3, r3, #23
0x80001f4 <+ 8> 43 f0 12 03 orr.w r3, r3, #18
0x80001f8 <+ 12> 13 60 str r3, [r2, #0] ; пишем раз
0x80001fa <+ 14> 13 68 ldr r3, [r2, #0]
0x80001fc <+ 16> 23 f0 17 03 bic.w r3, r3, #23
0x8000200 <+ 20> 43 f0 11 03 orr.w r3, r3, #17
0x8000204 <+ 24> 13 60 str r3, [r2, #0] ; пишем два
Функция чтения поля регистра достаточно тривиальна:
template<typename T>
INLINE constexpr static uint32_t getRegField(volatile uint32_t& reg,
const T field)
{
uint32_t mask = (((1 << field[1]) - 1) << field[0]);
return ((reg & mask) >> field[0]);
}За один вызов функции считывается одно поле регистра.
Ниже — реализованная при её помощи сервисная функция:
INLINE static bool getLatencyPrefetch()
{
return getRegField(rg()->ACR,
ACR::LATENCY,
ACR::PRFTBE);
}Полностью класс для управления flash будет выглядеть следующим образом:
struct Flash {
constexpr static uint32_t base = 0x40022000; //< Базовый адрес периферии
struct ACR {
constexpr static uint8_t LATENCY[]{ 0, 3 };
constexpr static uint8_t HLFCYA[]{ 3, 1 };
constexpr static uint8_t PRFTBE[]{ 4, 1 };
constexpr static uint8_t PRFTBS[]{ 5, 1 };
};
enum class Latency : uint8_t {
zeroWaitState = 0b000,
oneWaitState = 0b001,
twoWaitStates = 0b010
};
INLINE constexpr static volatile Regs* rg()
{
return reinterpret_cast<volatile Regs*>(base);
}
INLINE static void setLatency(Flash::Latency latency, bool prefetchBufferEnable = false)
{
Utility::setRegister(rg()->ACR,
ACR::LATENCY, static_cast<uint8_t>(latency),
ACR::PRFTBE, prefetchBufferEnable
);
}
INLINE static bool getLatencyPrefetch()
{
return getRegField(rg()->ACR,
ACR::LATENCY,
ACR::PRFTBE);
}
}; Работа с периферией извне осуществляется только через вызов методов классов. Можно было бы совсем закрыть всё лишнее, однако, исключительно для целей отладки иногда бывает полезно обратиться к полям класса напрямую. Поэтому всё определяется сознательностью разработчика.
Для работы с регистрами портов ввода-вывода я использую иной механизм, о нём будет в следующей статье.
Надеюсь, приведённая информация была вам полезна. В планах также рассказать о о реализации маленького лёгкого потока вывода в консоль, принципах построения шаблонов для работы со сторонней периферией и некоторых простых DSP-алгоритмах. Если это вам интересно — пишите в комментариях.













Goron_Dekar
… и собирать ошибки при ручном наборе всех этих
Нет, так делать нельзя ни в коем случае. Либо писать обёртку над CMSIS, либо генератор классов из данных SVD, о чём упоминалось в habr.com/ru/post/459642
DeddXey Автор
Интересная статья. Странно, что не видел её у себя в ленте.
Никогда не получалось настолько глубоко погрузиться в шаблоны, всё время приходится искать компромис между сложностью реализации (читай — временем на разработку) и качеством получаемого результата. Автору — респект!
С SVD файлами не всё так просто. Например, у того же ST в них есть некоторое количество ошибок, которые в неизменном виде кочуют в reference manual, видимо, его каркас генерируется автоматически. Нет там и признака R/W у поля регистра, и допустимых значений. Ручного труда по описанию периферии со всеми его ошибками не миновать, как ни крути.
Плохо пока понимаю, как можно красиво написать обёртку над CMSIS. Слишком разные подходы.
lamerok
Да ST SVD делает не законченный, биты полей нужно руками прописывать.
А поля R/W у них есть.
Можно через указатель на член структуры https://m.habr.com/ru/post/459204/?_ga=2.146897137.773613979.1584720929-1127692827.1563622228
См метод 10 и 10.5