
Никто не сомневается, что по мере совершенствования и обучения систем ИИ, осуществляющих управление робомобилями, последние будут демонстрировать все более уверенное и безопасное вождение. И ускорить тот день, когда понятие «резервное пилотирование» полностью утратит всякий смысл предложила команда Центра компьютерного видения (Computer Vision Center) в Барселоне, создав виртуальную модель городской инфраструктуры Synthia.
Основная задача обучающей платформы Synthia, моделирующей процессы реальной городской инфраструктуры, — ускорение обучения систем искусственного интеллекта в процессе обретения ими способностей распознавать препятствия, мгновенно ориентироваться и принимать решение в различных непредвиденных ситуациях при различных погодных условиях, включая дождь, туман, снег и гололед.
Как известно, основной материал, «скармливаемый» в процессе обучения нейронной сети — библиотеки снимков и видеосюжетов, полученных в реальном мире. Анализируя изображения, нейронные сети учатся распознавать, сопоставлять и классифицировать объекты различных категорий, таких, как: прочие автомобили и транспортные средства, дорожные знаки, знаки разметки, пешеходы и пр. Используя имеющуюся базу данных система в режиме реального времени интерпретирует информацию, поступающую с камер и датчиков, принимая в конченом счете решение о выполнении торможения, смены полосы движения, ускорения, поворота или другого действия, продиктованного конкретной дорожной ситуацией.

Системы ИИ не испытывают проблем при обработке данных при движении по автостраде или по другой прямолинейной траектории. Уровень сложности многократно повышается в условиях города, ограниченной видимости, при наличии множества перекрестков и пересечений улиц и др. С другой стороны все «скармливаемые» нейросетям снимки и видео должны иметь аннотацию и маркировку отдельных объектов на снимках, и составлять такие аннотации приходится вручную. Для того, чтобы представить себе объем проделываемых работ достаточно привести пример специалистов Daimler, которым в процессе реализации проекта CityScapes пришлось аннотировать без малого 20 000 изображений для объектов, разбиваемых на 30 отдельных классов.
В компании Mobileye, занимающейся разработкой ПО автопилота для автомобилей Tesla, в обработке изображений вручную задействованы 600 штатных специалистов, а к концу этого года их количество будет вынуждено увеличено до 1000. Обучающая платформа Synthia (Synthetic collection of Imagery and Annotations of urban scenario), разрабатывавшаяся командой специалистов под руководством Германа Роса (German Ros) из Барселоны предлагает элегантное решение этой неудобной проблемы.

Задуманная как видеоигра с участием уже классифицированных объектов, Synthia способна моделировать множество ситуаций, включая и маловероятные, с которыми ИИ вряд ли придется сталкиваться в реальной жизни.
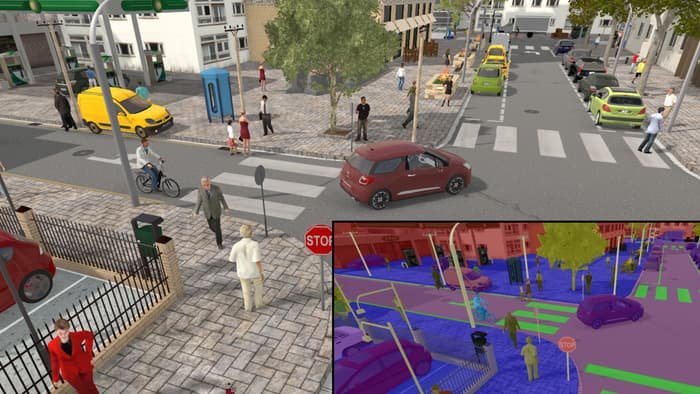
Использование игрового «движка» Unity позволяет создать реалистичную модель городской среды и спонтанно наполнить ее виртуальной жизнью: непредсказуемо себя ведущими пешеходами, велосипедистами, правильно и неправильно припаркованными автомобилями и пр. Одна из возможностей программы — способность моделировать всевозможные ситуации с учетом различных метеорологических условий, смены времени года и др. В виртуальную среду исследователи поместили виртуальный автомобиль с фиксированной ориентацией камер и создали для него возможность самостоятельно перемещаться по виртуальному городу, фиксируя происходящее вокруг на снимках и видео. Так была получена искусственная база данных из высококачественных реалистичных снимков и видеороликов с безупречной аннотацией. На следующем этапе полученные данные могут быть скормлены нейронной сети для обучения.
На сегодняшний день база данных, созданная специалистами Центра компьютерного видения уже включила около 213 тысяч изображений и видео. При этом, все снимки классифицированы в соответствии с той или иной ситуацией, с максимальным приближением имитирующей реальную. Первые полевые испытания системы Synthia продемонстрировали впечатляющие результаты и высокую эффективность метода.

Анализируя процесс обучения по восьми различным алгоритмам нейронных сетей, которым на вход подавались изображения низкого качества ( при разрешающей способности в 240 180 пикселей), специалисты пришли к выводу, что добавление к базе реальных снимков части «синтетических» изображений позволит существенно увеличить точность распознавания объектов 11 различных классов с 45 до 55 процентов. Коммерческая версия программного обеспечения, использующая снимки высокого разрешения, над разработкой которого трудится команда Германа Роса позволит увеличить эффективность системы обучения еще больше.
На сегодняшний день все данные, произведенные и накопленные системой Synthia беспрепятственно выкладываются в открытый доступ под лицензией «не для коммерческого использования». Это делается в целях установления обратных связей с заинтересованными лицам и организациями, популяризации продукта и поиска новых путей улучшения платформы. А создателям робомобилей разработчики Synthia предлагают создание соответствующих версий обучающей платформы с учетом уникальной конфигурации камер и других датчиков виртуального автомобиля, полностью соответствующей конфигурации камер и датчиков создаваемого автомобиля.
Первоисточник
На этом всё, с вами был простой сервис для выбора сложной техники Dronk.Ru. Не забывайте подписываться на наш блог, будет ещё много интересного…

 |
 |
 |
| Почему интернет-магазины отдают деньги за покупки? | Экономим до 8% с каждой покупки на AliExpres и других интернет-магазинах Китая | Верните свои деньги — Выбираем кэшбэк-сервис для Aliexpress |
Комментарии (13)

Tachyon
23.06.2016 08:25«Задуманная как видеоигра с участием уже классифицированных объектов, Synthia способна моделировать множество ситуаций, включая и маловероятные, с которыми ИИ вряд ли придется сталкиваться в реальной жизни.»
Хотелось бы посмотреть на эти маловероятные события
Российская действительность изобилует не просто маловероятными событиями, а прямо таки фантастичными: На днях у мусоровоза едущего в паре машин впереди на ходу выпала створка мусороприёмного окна (того что сверху бака) и приземлилась к решетке радиатора идущей с зади легковушки. Решетку разбило, водитель затормозил и не слабо получил сзади от несоблюдавшего дистанцию. Такое даже при ошибке рендера не случится в виртуальной среде…

lamoss
23.06.2016 10:54Как так вышло, что на 0:23 робот въезжает на перекресток в левом ряду, а выезжает уже в правом?
На дмитровском шоссе каждый день таким «роботам» в бок бьют вот здесь, когда со среднего ряда едут прямо https://yandex.ru/maps/-/CVXubA~c
Caullerd
27.06.2016 14:47Вспомнился аналогичный симулятор для обучения ИИ из книги «Выбор по Тьюрингу». Там тоже загружали ИИ в такую виртуальную среду и учили переходить дорогу. Когда он не видел приближающихся автомобилей на дороге — он все равно боялся начинать переход, аргументируя это тем, что нельзя безопасно перейти. Ведь сейчас автомобилей не видно, но если вдруг автомобиль будет двигаться со скоростью 500 км/ч…
FoX4all
Робомобили всегда подчиняются логике (алгоритмам поведения). Первая проблема робомобиля не внешние условия или технические ограничения, а водители-«обезьяны» за рулем соседних автомобилей. Чьё поведение как раз и не подчиняется правилам какой-либо логики.
esc
Подчиняется, хоть их поведение и не совсем соответствует ожидаемому с точки зрения правил. И научиться предсказывать действия неадекватов вполне можно, чем и занимаются постоянно водители с большим стажем. ИИ, покатавшись какое-то время, тоже вполне сможет это сделать.
FoX4all
С точки зрения правил — робомобили их всегда соблюдают. ИИ не имеет права сознательно нарушать ПДД. А то как трактуют его поведение люди рядом, это другой вопрос.То что идет обкатка ромобиля на создание системы прогнозирования поведения человека, это и так понятно.
esc
Ну его никто и не заставляет нарушать. Его задача — научиться предсказывать действия окружающих (даже если они едут не по правилам), реакция на это уже отдельный вопрос. Правила ведь штука довольно расплывчатая и в них много формулировок, рассчитанных на использования здравого смысла (т.е. не математически строгие правила).
Kanut79
Неправда. Они их вполне себе нарушают на данный момент. Не специально конечно, но нарушают.
ClearAirTurbulence
Со временем правила будут менятся. Потому что сейчас понятно, почему нельзя пересекать двойную сплошную. Но при полной замене людей на роботов само понятие разметки утратит смысл. Зачем «жестко» разделять дорогу, если все машины в окресностях знают ее ширину, количество транспортных средств, их скорость, местоположение, расстояние между ними и траекторию, и активно обмениваются между собой этой информацией? Они могут ездить как в Индии, при этом — безаварийно. По сути, любая полоса на дороге без людей за рулем может быть реврсивной, и их количество и расположение может также меняться для повышения пропускной способности и\или обеспечения плавности поездки.
esc
До полной замены людей автопилотом на дорогах еще не один десяток лет нужен. Как минимум, правила следует делать менее расплывчатыми с точки зрения математики, чтобы уже сейчас автопилоты могли нормально взаимодействовать с людьми.
artyfarty
Человеки вообще классные. Уже через несколько месяцев вождения начинаешь понимать, что кто-то сейчас подрежет без поворотников по куче косвенных признаков, включая не только явное прижатие к краю полосы, но и ускорение, внешность машины, собственную скорость и расположение в потоке...
napa3um
Вы правы, основное преимущество человека перед роботом на дороге — умение проецировать свои рефлексивные способности на других и, как следствие, предсказывать поведение других участников дорожного движения (а порою и провоцировать его). Для роботов проблема решается либо заменой всех участников движения на роботов, либо развитием нейросетей до способности «человечески» рефлексировать, либо ужесточением ПДД до алгоритмической конкретики. Возможно, эти направления будут развиваться параллельно в рамках различных инициатив.
FoX4all
Хорошо бы если так. Проблематика очень широкая — от развития ИИ и алгоритмов обработки первичных сигналов, до законодательной базы. Дожить бы, посмотреть что получиться))