

На фото из Википедии: F16, на котором впервые был использована шина MIL-STD-1553В. Наши устройства не летают :), поэтому каких либо ограничений по применению элементной базы нет. Просто у Заказчика приборная сеть построена на основе этой шины. Первая часть статьи описывает прием и передачу по шине МКИО, вторая часть будет про конвертер в MODBUS.
Первый этап любой разработки: поиск информации и чтение документации. После этого этапа в голове сложилось следующее:
— протокол достаточно прост :)
— максимальный кадр 32 байта :)
— имеет довольно жесткий тайминг :(
— довольно дорогие микросхемы и модули :(
После некоторых размышлений остановился на использовании кодера — декодера HI-15530, фирмы HOLT, однако аналогов у это микросхемы достаточно много. Правда не все могут быть доступны в России за разумные деньги и сроки. :)
Вот примерная схема включения этой микросхемы. Правда взята из даташита аналога. :)
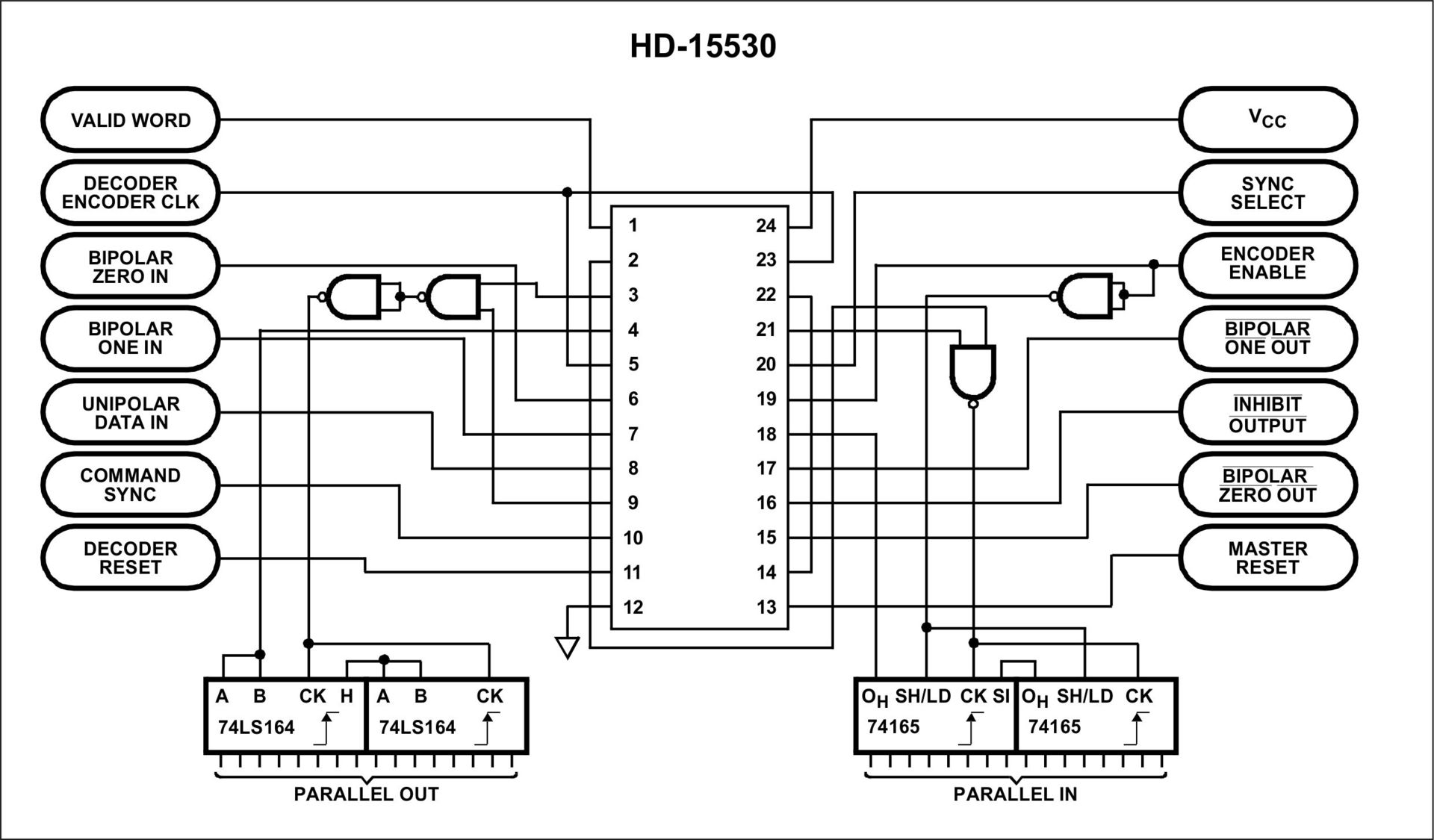
Дальше все просто :) Подключаем к портам микропроцессора 16 разрядные шины данных: PARALLEL IN и PARALLEL OUT и управляющие сигналы:
— VALID WORD (Принято корректное слово)
— ENCODER ENABLE (Начало передачи слова)
— COMMAND SYNC (Выбор команда/данные)
Вместо регистра 74LS164 пришлось использовать аналог ЭКФ1533ИР8. Кроме этого используются повторители SN74ALS1035 (ЭКФ1533ЛП17) с открытым коллектором для согласования сигналов 3.3В (STM32) до 5В (HI-15530).
После некоторой переписки с производителями и поставщиками был выбран приемо-передачик EL-15N фирмы ЕЛКУС.

Добавился еще один сигнал управления ST (Включение передатчика)
Получилась вот такая плата.

Началась отладка программного обеспечения. Для имитации обмена данных с каналом был приобретен USB модуль у компании «Модуль», который может быть, как оконечным устройством (ОУ), так и контроллером шины (КШ).

К модулю прилагается программа управления PURUMK. Программа приема и передачи получилась достаточно простой.
Прием 16 разрядного слова происходит по прерыванию от сигнала VALID WORD:
void EXTI9_5_IRQHandler (void) //Valid Word
{
Ctrl_LED3_ON
EXTI->PR|=0x0040; //Очищаем флаг
STD1553_RX_buffer[recieve_count] = GPIOE->IDR;
recieve_count++;
frame_from_channel = 1; //флаг принятого слова
Ctrl_LED3_OFF
}
Обработка флага принятого слова:
if (frame_from_channel)
{
frame_from_channel = 0;
switch (Channel_state)
{
case 0: //обработка командного слова
Device_address_recieved = STD1553_RX_buffer[0];
Device_address_recieved = Device_address_recieved >> 11;
if (Device_address_recieved == Device_address) //запрос по адресу
{
Command_recieved = STD1553_RX_buffer[0]; //сохранение команды в буфере
Command_recieved = Command_recieved & 0x001F; //выделение команды/количества слов
Transmitt_direction = STD1553_RX_buffer[0];
Transmitt_direction = Transmitt_direction & 0x0400;
if (Transmitt_direction == 0x0400) //запрос информации в канал
{
TRANSMITTER_ENABLE_HIGH;
//запуск таймера передачи данных
TIM5->CR1 |= TIM_CR1_CEN; //Bit 0 CEN: Counter enable
TIM5->CNT = Transmitt_word_period; //
Answer_word_flag = 1;
}
else //прием данных из канала
{
Channel_state = 1;
}
}
else
{
recieve_count = 0;
}
break;
case 1: //прием данных
if (recieve_count == Command_recieved + 1)
{
//передача ответного слова
TRANSMITTER_ENABLE_HIGH;
Answer_word_flag = 1;
Command_recieved = 0;
//запуск передачи
TIM5->CR1 |= TIM_CR1_CEN; //Bit 0 CEN: Counter enable
TIM5->CNT = Transmitt_word_period; //
}
break;
} //end of switch
} //end of if
И собственно передача данных в канал. Передача каждого слова в канал происходит по прерыванию таймера.
//передача данных по МКИО
void TIM5_IRQHandler (void) //
{
EXTI->IMR &= ~EXTI_IMR_MR6; //DISABLE Interrupt Mask on line 1
if (Answer_word_flag)
{
SYNC_SELECT_COMMAND;
Answer_word_flag = 0;
}
else
{
SYNC_SELECT_DATA;
}
GPIOD->ODR = STD1553_TX_buffer[transmitt_count];
delay(5);
ENCODER_ENABLE_HIGH; //запись данных в регистр
delay(112);
transmitt_count ++;
ENCODER_ENABLE_LOW; //начало передачи данных в канал
if (transmitt_count > Command_recieved)
{
delay(700);
TIM5->CR1 &= ~TIM_CR1_CEN; //Bit 0 CEN: Counter enable
transmitt_count = 0;
EXTI->IMR |= EXTI_IMR_MR6; //ENABLE Interrupt Mask on line 1
Channel_state = 0;
recieve_count = 0;
TRANSMITTER_ENABLE_LOW;
}
TIM5->SR = 0;
TIM5->CNT = 0;
}И вот результат.
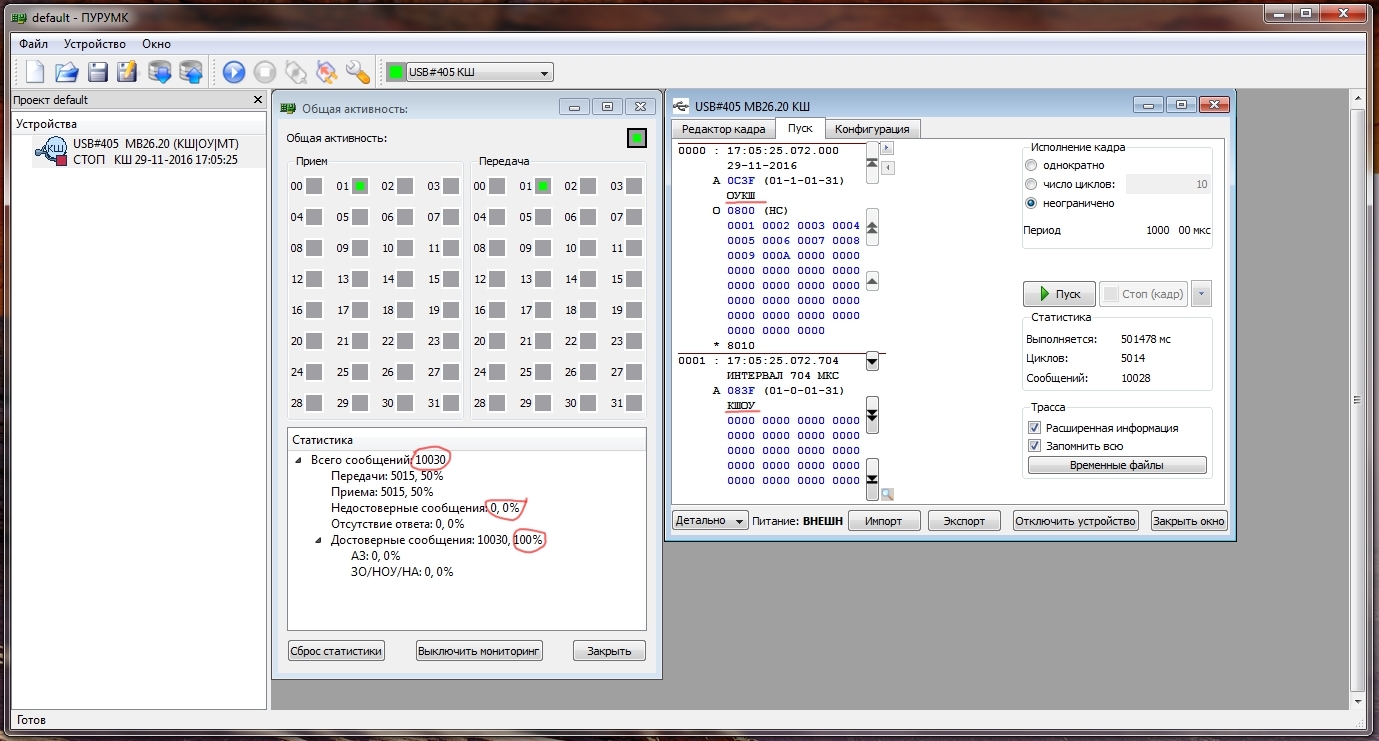
Аббревиатуры ОУКШ и КШОУ означают, соответственно: оконечное устройство — контроллеру шины, контроллер шины — оконечному устройству. То есть в первом случае запрос на передачу данных от ОУ, а во втором передача данных оконечному устройству. И в том, и другом случае передается по 31 слову. Более 10000 слов принято и передано и ни одной ошибки. :)
Комментарии (24)

OvO
29.11.2016 16:32+2Программа приема и передачи получилась достаточно простой.
Протокол реализован частично, нет даже обработки ошибок.sanders1967
29.11.2016 16:37+2Считывание принятого слова начинается по сигналу VALID WORD, который поднимает микросхема декодера. Вот как сказано в ДШ: A high on VALID WORD output indicates a successful reception of a word without any Manchester or parity errors. Если есть ошибки, значит не будет сигнала и, соответственно, прерывания на обработку слова.
OvO
29.11.2016 17:01+1А где обработка команд, подадреса, ошибок при передачи, поддержка резервирования и пр. — я понимаю, что может быть вам это не надо, но тогда не напишите что реализовали протокол.
Если есть ошибки, значит не будет сигнала и, соответственно, прерывания на обработку слова.
слово пропадет, в сообщении будет дырка, но мы об этом не узнаем, прекрасно.
kravtsov_dim
29.11.2016 17:02Т.е. вы хотите сказать, что полностью реализовали протокол со всякими busy и командными словами?
По мне, протокол по ГОСТ Р 52070-2003 самый дурацкий, с которым приходилось сталкиваться.sanders1967
29.11.2016 17:06+2Т.е. вы хотите сказать, что полностью реализовали протокол со всякими busy и командными словами?
Нет, конечно. :) Только тот функционал, который был нужен мне.
По мне, протокол по ГОСТ Р 52070-2003 самый дурацкий, с которым приходилось сталкиваться.
Полностью согласен. :)
OvO
29.11.2016 17:27Нормальный протокол, наверно наиболее близок к CAN. Есть свои особенности — контроль передачи каждого слова, детерминизм, в остальном все стандартно. ГОСТ тяжелый в силу непривычности терминов.

a-tk
02.12.2016 17:51+1Ожидал, что будет что-то интересное типа эмуляции протокола, а оказалось, что показалось.
— максимальный кадр 32 байта :)
Не байта, а 16-битных слова
В выбранной микросхеме только приёмо-передатчик? То есть обеспечивает лишь физику? Ответные слова и всё остальное кто должен формировать?
Странно видеть отправку слов по таймеру: времянка при посылке данных очень строгая, задержки между словами данных не предусмотрено. По крайней мере задержка более 4 мкс не допускается.
Может проще было бы добыть какой-нибудь модуль с буферной памятью для 1553?
Это pet-проект или что-то из рабочего-то? :)
sanders1967
02.12.2016 17:55Вы правы — ошибочка вышла :) конечно 32 слова. В HI-1553 кодер и декодер манчестера и контроль четности. Прерывания по таймеру выдерживаются достаточно строго. Это из рабочего, управление высоковольтным выпрямителем.
a-tk
02.12.2016 18:00Брутальненько… Тем более без контроля ошибок. У Вас есть хотя бы простейшая защита сообщений контрольной суммой?
И я как-то не совсем понял, при чём тут STM32? Для заголовка? :)
Таймер, отправляющий слова, должен иметь период не менее 20 мкс и не более 24 мкс, лучше ближе к 20 мкс. Но вообще брутально всё это. Неужели микруха не отдаёт прерывание по окончанию пересылки?sanders1967
02.12.2016 18:04Какой контроль ошибок Вы имеете в виду? Кое чем STM32 все-таки занимается в этой схеме. :)
a-tk
02.12.2016 18:08Контроль целостности передачи информации.
Когда принимаете командное слово и собираете посылку, проверяете соответствие количества принятых слов длине из КС?
Ещё раз повторю вопрос про то, кто формирует ответные слова.sanders1967
02.12.2016 18:15Контроль четности делает HI-15530. Сравнение счетчика принятых слов и длины из КС пока не делал. Ответные слова формирует контроллер STM32.
a-tk
02.12.2016 18:01PS: а монитор шины-то есть у Вас нормальный? С ним жизнь становится куда приятнее.
sanders1967
02.12.2016 18:17В качестве монитора шины может работать МВ26.20. Но пока в этом режиме он не понадобился. Хватило осциллографа. :)
iliasam
Заметно, что вы старались использовать отечественную элементную базу. Но почему не стали использовать микроконтроллеры от Миландра, у них и поддержка MIL-STD-1553 есть?
sanders1967
Их продукцию тоже рассматривал. Вот такой чип нашел 1986ВЕ1Т, с поддержкой MIL-STD-1553. Но поиск по Efind выдал, что стоит он около 20 000=, отладочная плата от 80 000=. Как то не очень бюджетно получается. Они прежде всего ориентированы на то, что летает. Соответственно и корпуса и приемка очень не дешевые. А мне нужно было именно бюджетное решение.
Shlepanets
Скорее всего за 20 тысяч вы нашли версию в керамическом корпусе. Данный микроконтроллер имеет и версию в пластике под наименованием К1986ВЕ1QI, на сайте пишут цену 715,08 отладочный комплект 6545 рублей.
sanders1967
Это хорошая цена. В будущем можно рассматривать применение. Хотя очень надеюсь, что больше не придется использовать этот интерфейс. :)
Lerk
А вы тему то на их форуме читали про мультиплекс? Он не соответствует ГОСТу. Вроде в 5ой или 6ой коррекции чипа обещали поправить, точно не помню.
Хотя вопрос резонный. По приемопередатчикам та же тема. Странный подбор компонентов.
sanders1967
Запросы по приемо-передатчикам были разосланы по нескольким компаниям. Именно этот оказался за приемлемые деньги и сроки. Вообще на этой плате приемо-передатчик самый дорогой компонент. :)