

Рис. 1. Беспилотный автомобиль в центре ничего не способен предпринять для обеспечения гарантированной безопасности. В случае неадекватных действий водителя-человека из соседней машины авария неизбежна, а потом — многомесячное расследование ДТП с пристальным вниманием прессы к аварии, где «автопилот убил человека». Никакое предварительное обучение нейросети не поможет обезопасить машину в такой ситуации. Единственное решение проблемы — заранее предусмотреть правила дорожного движения для робокаров, чтобы исключить возникновение такой ситуации в принципе
В последние годы автопроизводители и IT-компании участвуют в гонке, кто первым разработает полностью беспилотный автомобиль, способный действовать без участия человека в любых ситуациях (SAE Level 5). Массовое распространение таких автомобилей обещает грандиозные экономические и социальные преимущества для человеческого общества, среди них — кардинальное уменьшение смертности на дорогах, уменьшение количества инвалидов, более гибкая и эффективная транспортная система, доступная для всех.
Создаётся впечатление, что нынешние автопроизводители и IT-компании, которые участвуют в технологической гонке, воспринимают беспилотный автомобиль как продукт — и думают прежде всего об освоении рынка, а не о сотрудничестве с другими автопроизводителями. У компании Mobileye, которая недавно куплена корпорацией Intel, иной взгляд на вещи. Она напоминает всем участникам «капиталистического соревнования», что робокар — это не просто продукт, а индустрия, где должны быть выработаны совместные правила. С этой целью компания разработала первый в мире математический фреймворк для гарантированной безопасности беспилотных автомобилей (pdf). Фреймворк представил на Всемирной форуме знаний в Сеуле (Южная Корея) профессор Амнон Шашуа (Amnon Shashua), который является генеральным директором Mobileye и старшим вице-президентом Intel.
Естественно, у Mobileye/Intel есть свой интерес. Разработка мировых стандартов для автомобилей может принести больше прибыли, чем выпуск самих этих автомобилей.
Чтобы индустрия беспилотного транспорта успешно развивалась, требуются совместные усилия автопроизводителей, технологических компаний и государственных регуляторов. Все вместе они должны выработать общую единую для всех модель взаимодействия. Компания Mobileye создала математический фреймворк для такой общей модели. Он подробно описан в научной работе. Фреймворк основан на двух фундаментальных принципах:
- Доказуемые гарантии безопасности.
- Экономическая масштабируемость.
Mobileye считает, что без ясной модели с описанием этих двух важнейших параметров все усилия по созданию автономных автомобилей станут бессмысленными, то есть робокары превратятся просто в дорогостоящий научный эксперимент.
Стандартные доказуемые гарантии безопасности — это минимальный набор требований, которым должен соответствовать каждый беспилотный автомобиль, и описание способов, как им соответствовать.
Экономическая масштабируемость — требование, которое призвано гарантировать, что разработанные инженерные решения действительно способны масштабироваться на миллионы автомобилей, а не скатятся опять в академическую нишу, представляя интерес только для научных исследований. Такое уже случалось в истории развития Искусственного интеллекта и машинного зрения. Среди западных исследователей есть термин «зима ИИ» (winter of AI). Под ним обычно имеют в виду десятилетия практически полного бездействия, которые наступили после провала исследований Искусственного интеллекта в начале 80-х годов. Провал был неизбежен, потому что исследователи изначально поставили недостижимые цели и раздули хайп.
Есть мнение, что развитие беспилотных автомобилей может пойти по такому же сценарию: уж слишком радужные перспективы обещают разработчики этой технологии, что может обернуться разочарованием общества и прекращением финансирования отрасли, если разработчики не смогут выдать результат, который соответствует этим ожиданиям.
Чтобы такого не произошло, нужно заранее при разработке фреймворка продумать все вопросы, в том числе экономической масштабируемости.
Существующие разработки не соответствуют именно этим двум важным критериям — стандартным доказуемым гарантиям безопасности и требованиям экономической масштабируемости. К счастью, индустрия теперь понимает возможные проблемы — и у нас есть шанс заранее предусмотреть варианты решения возможных проблем.
Специалисты Mobileye критически высказываются о том, как инженеры-разработчики беспилотных автомобилей сейчас пытаются решить проблемы безопасности статистическими методами. Якобы достаточно накатать определённый (большой) километраж для обучения нейросети — и это гарантирует безопасность автомобиля практически в любой ситуации. Но сразу нужно отметить, что абсолютной безопасности добиться теоретически невозможно, потому что многие ДТП происходят по вине других участников дорожного движения, а у самого субъекта нет никакой возможности повлиять на ситуацию (в качестве иллюстрации см. рис. 1 вверху). То есть таким способом нельзя добиться нулевого уровня происшествий, а только снизить его до социально приемлемого уровня.
Mobileye приводит такой пример. Разумно предположить, что для достижения общественного консенсуса по поводу замены управляемых автомобилей на беспилотники уровень смертности на дорогах должен снизиться на три порядка. Предположим, что вероятность умереть в аварии при управлении автомобиля человеком составляет 10?6 в час (это цифра, близкая к реальной). Тогда для «гарантированной безопасности» нам нужно снизить эту вероятность в беспилотных автомобилях до 10?9 в час (это тоже реальная цифра, которая взята из авиационной индустрии: она соответствует вероятности непроизвольного отделения крыла самолёта от фюзеляжа во время полёта).
Так вот, чтобы статистическими методами гарантировать столь низкую вероятность смертности 10?9 в час, очевидно, нужно собрать 109 часов экспериментальных данных, что соответствует наезду примерно 45 млрд километров.
Более того, в случае с системой из множества агентов, которая реагирует с окружающим миром и живыми людьми (водителями и пешеходами) мы не можем использовать виртуальные симуляторы, потому что ещё не создан (и вряд ли будет создан в будущем) алгоритм действий и, соответственно, симулятор поведения непредсказуемого водителя или пешехода. То есть при любом изменении управляющего программного обеспечения потребуется дополнительный сбор экспериментальных данных — ещё 45 млрд часов, чтобы соответствовать статистической модели.
В конце концов, обучение системы безопасности на нейросети с помощью собранных данных неизбежно будет страдать от недостаточной интерпретируемости и объяснимости. Если автопилот собьёт пешехода с летальным исходом — нужно найти причину и объяснить, из-за чего конкретно произошло происшествие, что нужно исправить в системе, чтобы такого больше не повторилось. К сожалению, «чёрный ящик» нейросети не позволяет обеспечить ясное и понятное объяснение в таких ситуациях.
Беспилотным автомобилям придётся делить дорогу с людьми на протяжении ближайших десятилетий, поэтому каждая модель должна учитывать непредсказуемый характер людей. Кроме того, автопилотам придётся в первые десятилетия подстраиваться под стиль вождения, который люди считают «нормальным».
При разработке модели гарантированной безопасности следует учитывать, что любой автомобиль в любой момент может испытать механическое повреждение или подвергнуться воздействию внешних сил. Хотя полностью предусмотреть все сценарии возможной аварии невозможно, но можно минимизировать вероятность таких сценариев и прогнозируемую смертность на час езды.
Mobileye предлагает внедрить фреймворк с набором правил, основанных на математических моделях. Они защитят самих автопроизводителей от общественного порицания в случае ДТП с фатальным исходом при участии беспилотных автомобилей — а такие инциденты неизбежны.
Специалисты Mobileye разработали такую систему под названием Responsibility-Sensitive Safety (RSS). Она гарантирует, что с точки зрения принятия решений система автопилота никогда не выдаст команду, которая могла бы привести к тому, что робокар станет причиной ДТП. Для этого в модель ввели понятия «безопасного состояния» (Safe State) и «осторожных команд» (Cautious Commands), которые гарантируют, что автомобиль не выйдет за пределы безопасного состояния.
Система RSS отличается тем, что при её разработке отказались от традиционного подхода с анализом многочисленных условий и интенсивным анализом большого объёма данных о текущей обстановке — это просто невыполнимо как в реальных дорожных условиях, так и в симуляции. Вместо этого каждое действие автопилота проверяется в реальном режиме времени на соответствие простым математическим формулам. Вычислительной мощности современных компьютеров вполне достаточно, чтобы выполнять такие вычисления в реальном времени. Например, на рис. 2 показана формула вычисления безопасной дистанции до впереди идущего транспортного средства с живым водителем, если с этим автомобилем отсутствует беспроводная связь и координация действий по межтранспортному протоколу V2V.
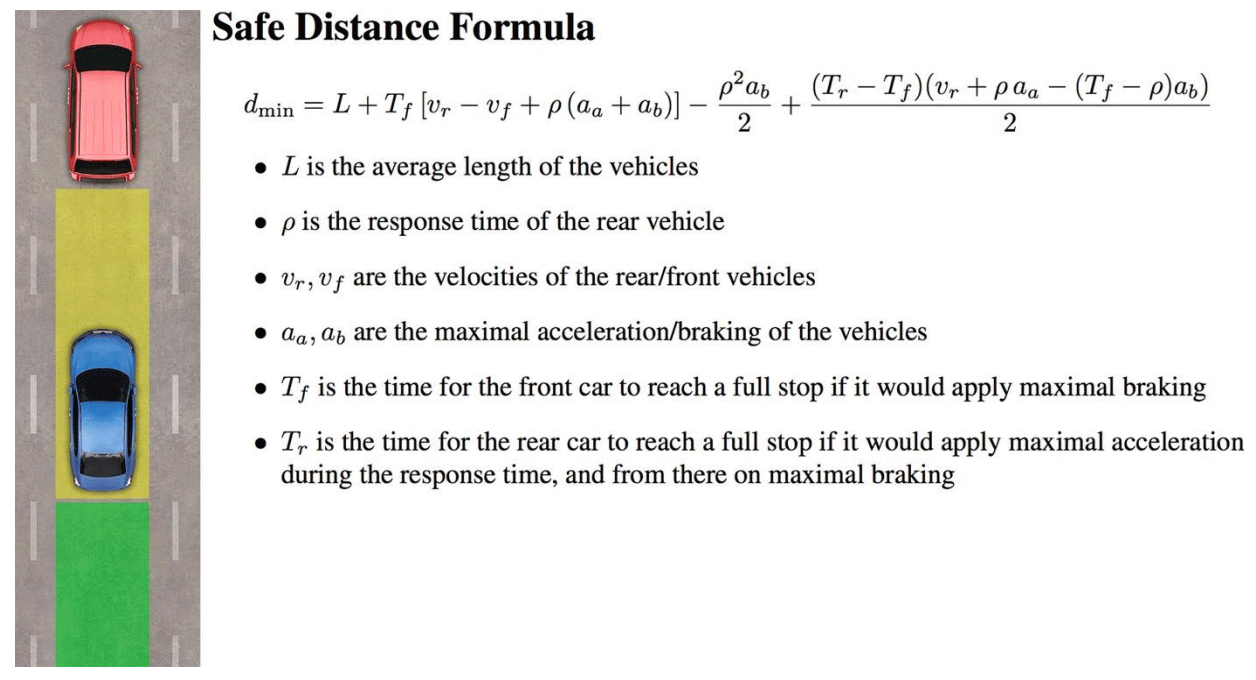
Рис. 2. Формула для вычисления безопасного расстояния между автомобилям
По оценке Mobileye, разработанные математические правила позволят на три порядка снизить смертность на дорогах при переходе на беспилотный транспорт. Если сейчас смертность составляет 1 человек на миллион километров проезда, то в беспилотном транспорте она составит 1 человек на миллиард километров. Для американской транспортной системы это означает уменьшение смертности с примерно 40 000 человек в год (статистика за 2016 год) до примерно 40 человек в год.
Нужно учитывать, что аварии и смерти людей по вине беспилотников всё равно возможны в случае механических повреждений, выхода из строя сенсоров на беспилотном автомобиле и других неисправностей. Тем не менее, уменьшение смертности на три порядка должно убедительно показать обществу преимущества беспилотного транспорта.

Рис. 3. Рассчитанные коридоры безопасности вокруг автомобиля определят виновника при маневрировании и подрезании
Беспилотный автомобиль (синяя машина на рис. 3) чётко знает, какие коридоры должны соблюдаться до впереди идущего автомобиля и перед автомобилем позади. Если водитель-человек вторгнется в этот коридор, например, спереди (то есть подрежет беспилотник), а из-за резкого оттормаживания беспилотник столкнётся с автомобилем сзади, то виновником такого ДТП в случае разбирательства будет признан красный автомобиль с человеком-водителем за рулём.
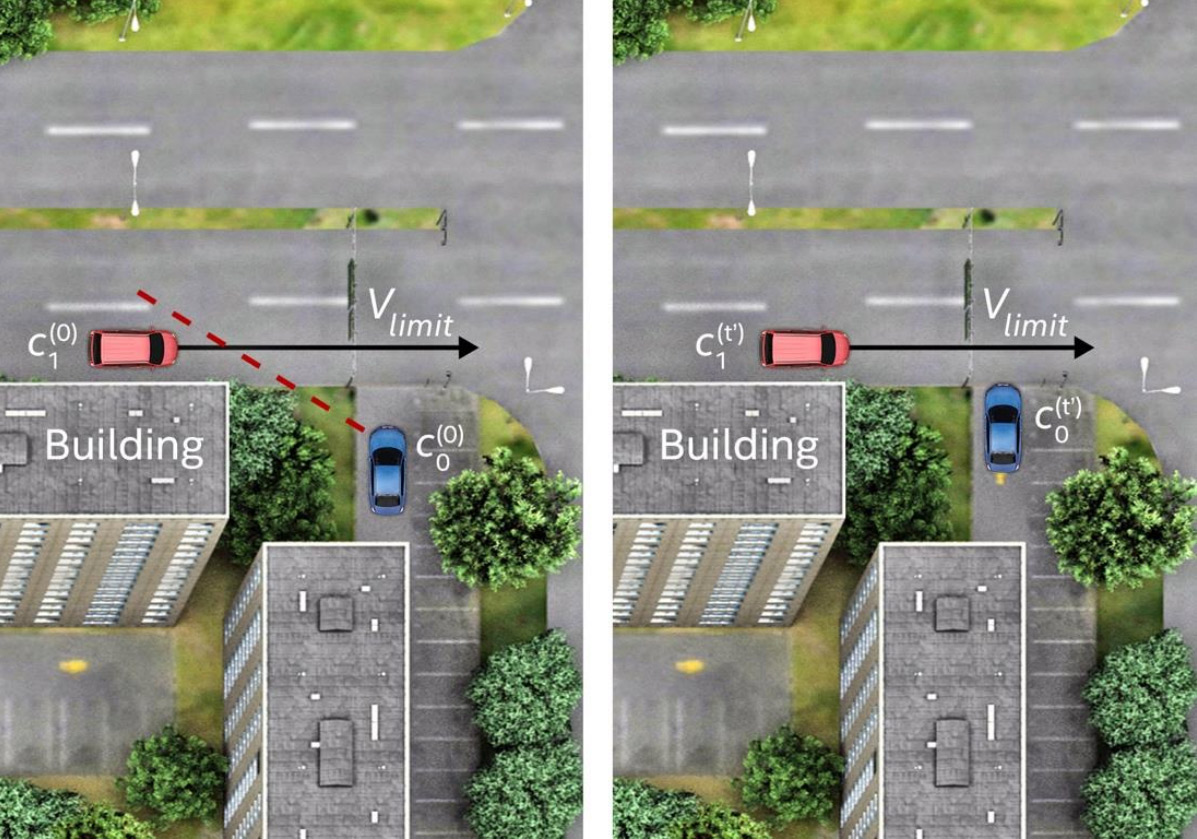
Рис. 4. Система RSS учитывает даже ситуации, где объекты (автомобили, пешеходы и проч.) закрыты другими объектами
Mobileye предлагает использовать сенсорную систему Sensor Fusion, основанную на трёх независимо разработанных системах, где каждая полагается на три разные технологии: камера, карта высокого разрешения и радар с лидаром.
При расчёте безопасного состояния и соответствующих осторожных действий математическая модель RSS учитывает в том числе ситуации, где объекты (автомобили, пешеходы и проч.) закрыты другими объектами. Например, на рис. 4 автомобиль осторожно выезжает с парковки с учётом максимально возможной скорости () автомобиля на дороге.
Если подобные правила жёстко зашить а программу автопилота, то расследование инцидентов с беспилотными автомобилями станет простым, коротким и основанным на фактах, а ответственность за ДТП можно будет установить точно и окончательно. Такие правила, по мнению компании, увеличат доверие общества к беспилотным машинам. Все будут знать, что есть непреложные правила, которым подчиняется любая машина с автопилотом. Как три закона робототехники Айзека Азимова, только для ПДД.
Комментарии (83)

Anarions
18.10.2017 15:35И вправду звучит очень привлекательно. Ведь понять логику самообучающейся нейросети практически невозможно.
vassabi
18.10.2017 15:37что за "вместо обучения"? опять кто-то что-то с журналистами делает ....
В принципе — идея действительно здравая, чтобы автопилот записывал все критические параметры окружения (и, НЯП, мат.модель об этом — что считать таковыми), и при разборе ДТП это учитывалось.
Я бы еще предложил, раз такое дело, то машины с автопилотами оборудовать дополнительными ходовыми огнями — например оранжевой полосой сзади (ниже или на уровне стопов-поворотов). Чтобы при включении автопилота — она автоматически зажигалась тоже, и сигнализировала: "да, это транспортное средство не так быстро перестраивается и поворачивает. Зато оно не делает резких движений, держит дистанцию и у него на борту пять видеокамер, тра радара и т.д., и в случае ДТП — будет свидетелем".

Akon32
18.10.2017 15:48Это всё замечательно, и к этому нужно стремиться.
Но например данная формула не учитывает, что в случае непредвиденных ситуаций скорость торможения может уменьшаться (неисправность тормозов или потеря сцепления с дорогой) или увеличиваться (наезд на стену или в камаз с мгновенной остановкой). Интересно, как соотносится вероятность таких событий с заявленной цифрой 10^-9 ?
рисунок с формулой

Mutineer
18.10.2017 16:10Тут еще вопрос откуда автомобиль возьмет все эти данные об окружающих машинах
vassabi
18.10.2017 16:21может, это для расчёта интервала величин? Т.е. "если передняя машина будет останавливаться со скоростью х1 — то значит дистанция — у1, а если х2 — то у2, и т.д."
Или, возможно — по поведению самого водителя. Есть такие, которые то резко тормозят, то резко ускоряются, а есть — которые медленно, можно это отслеживать в процессе.
Во-вторых — это еще можеть быть формула для предсказания аварии, т.е. "так, я сейчас торможу на светофоре, чтобы задняя машина затормозила ДО меня, то ей сейчас нужно сбрасывать скорость 1 км/ч за время т1 мс. Прошло уже 500мс, а она не тормозит — значит приедет в меня".

bertmsk
18.10.2017 22:06> Прошло уже 500мс, а она не тормозит — значит приедет в меня
Ну да. Так и вижу ситуацию:
Сзади едет рейсер К0Т, на своей Мазде, которая еще видела Джорджа Буша Старшего.
К0Т всегда тормозит в пол и останавливается в 5см от бампера впередистоящей машины. Потому что время не щадит никого, потому что Дж.Буш Старший и вообще потому что может.
И вот, этот наш ИИ пытаясь избежать столкновения резко дает газ, выезжая на перекресток на темно розовый.
К0Т, резко затормозил перед стоп линией, как он обычно делает.
К0Т очень удивился с машины спереди — «Чё творит, [нрзбрч]?»
Ни с того ни с сего, серебристая Харизма, с визгом резины попыталась умчаться в закат, но была вовремя наказана низко летящим поперечным камазом
{{ тут слоумо удара, сминаемой машины, бородатого хипстера, дисплей на панели харизмы с текстом (взять крупным планом) «ИИ прощается с вами. Хорошего вам настроения, счастья, здоровья и держитесь тут. Как следует держитесь :)» }}
В салоне Кота, сквозь умц-умц-умц, слышно как тот говорит "[нрзбрч] [нрзбрч]! Понакупают прав, [нрзбрч]. Ездить не умеют, [нрзбрч]. Надо видос будет с регика в Одноклеточники слить [нрзбрч] [нрзбрч]".
В итоге имеем 1 труп, 2-3 искореженных машины, но зато клёвый видосик в ru_chp с метками #на_все_деньги, #любимые_мелодии, #большой_грузовик_наказания, #синька_и_норкоманы, #последние_секунды_жизни
{{ затемнение экрана }}
{{ текст по центру «ВЫ ХОТИТЕ ЧТОБЫ ЗАМОРСКИЙ ИИ НАЖАЛ КНОПКУ DELETE НА ВАШЕЙ ЖИЗНИ?» }}GerrAlt
19.10.2017 09:37Про летящий камаз система тоже может знать и выбрать между помятым багажником и тотальным демонтажом половины авто.

old_gamer
19.10.2017 10:49Очень сомневаюсь, что какой-либо алгоритм будет уходить от аварии, нарушаяя ПДД (на глубоко розовый). Скорее он тормоза покрепче зажмет, и ремни натянет, подголовники подогнет, стекла закроет, что там еще pre-safe обычно делает? Но уж точно не поедет на красный, или на встречку.

Radmin
19.10.2017 13:09Стёкла перед столкновением, наоборот, экстренно опускаются, если я не ошибаюсь.

vp7
19.10.2017 13:11А ведь иногда уход на встречку или выезд на светофор на ярко-красный будет самым лучшим решением (а, возможно, и единственным).
Проблема в обсуждении ИИ в другом — почти любой водитель хоть раз в жизни грубо нарушал ПДД, чтобы избежать аварии. Некоторое кол-во из таких в итоге в аварию попали или даже усугубили ситуацию. Могу надеяться, что общая статистика по авариям говорит, что нарушение ПДД при уходе от аварии — благо и уменьшает аварийность.
Но от ИИ-то ожидают 100% (или 99%) «верного» (с точки зрения выживаемости/уменьшения нанесённого вреда) решения.old_gamer
19.10.2017 14:17Согласен с вами, но сомневаюсь, что морально допустимо одобрить алгоритм, который грубо нарушает правила, даже во имя спасения жизни, ведь критерии, по которым принимается решение о грубом нарушении правил, — тоже очень тонкая тема. Думаю, по крайней мере для старта, единственное правильное решение — никогда ни при каких условиях не нарушать правила.
vp7
19.10.2017 15:44Думаю, что есть смысл определить критерии нарушений и также прописывать их в правилах.
К примеру, выезд на обочину нередко может оказаться предпочтительней, нежели «оттормаживаться в пол до столкновения» (предпочтительней, но с массой «если»: обочина широкая, на ней никого нет, нет риска убиться в кювете и т.д.).
Или ещё один классический случай — водитель начинает пропускать пешехода, а едущий сзади явно не успевает оттормозиться.
Варианта два — начинаем пропускать перехода, получаем сильнейший удар сзади, давим пешехода, но виноват тот, кто оказался сзади.
Либо — сигналим, всем видом показываем, что пропускать человека не собираемся и проезжаем дальше. Нарушили? Нарушили и получили массу минусов в карму от обиженного пешехода. Избежали ДТП? Да, причём одному, возможно, жизнь спасли, а второго от тюрьмы уберегли.old_gamer
19.10.2017 15:54Про критерии можно спорить, я согласен, что выезд на обочину — это не так страшно, но и правила допускают такой выезд в экстренных случаях, в отличие от выезда на встречку или проезда на красный.
Сигналить и всем видом показывать, что пропускать не собираемся — не вариант. Предсказать реакцию пешехода в таком сценарии невозможно, и единственное правильное решение — тормозить. По возможности — маневрировать, если это не создаст помех другим участникам движения.
Я вижу только один выход в этом сценарии — тормозить И сигналить пешеходу.old_gamer
19.10.2017 15:58Выскажу еще одну мысль, несколько не по теме, но все же: иногда шанс выжить у непристегнутого пассажира больше, чем у пристегнутого. Но такие случаи чрезвычайно редки, и предсказать их невозможно, поэтому все пристегиваются. Так же и с нарушением правил. ИМХО.

Xandrmoro
19.10.2017 14:19Могу надеяться, что общая статистика по авариям говорит, что нарушение ПДД при уходе от аварии — благо и уменьшает аварийность.
Сомневаюсь, потому что большая часть случаев, когда аварии удалось избежать, не попадёт в статистику — об этом просто никто не узнает.
vp7
19.10.2017 15:56С официальной всё понятно — ДТП ведь не было, значит даже если смогли бы, то не учли.
Безумное кол-во аварий избегается по методу «ДДД». И если роботы не научатся пользоваться этим неписанным принципом, то аварийность с их появлением увеличится многократно.
Как пример — перестроение с неосознанным подрезанием.
Избежать ДТП легко — просто притормозить, когда видишь подозрительный манёвр едущей чуть впереди машины. Особенно, если ты в её мёртвой зоне.
В случае ДТП однозначно прав ты, но если чуть притормозить, то ДТП не произойдёт (и не попадёт в статистику).
А уж про обгоняющих по встречке по принципу «да успею я, точно успею вон перед той машинкой проскочить» вообще молчу. На одной чаше весов — потеря 10 секунд времени (максимально прижаться к обочине, даже пересекая сплошную линию), на другой (если действовать строго по ПДД и просто тормозить в пол) — минимум две машины на серьёзный ремонт, максимум — два и более трупов.

igormich88
19.10.2017 14:21Что значит единственным? Насколько я понимаю логика запрета такого поведения основывается на невовлечение в ДТП тех кто к нему не причастен. Всегда есть риск не заметить машину на встречной полосе и тем более на перекрестке.
vp7
19.10.2017 16:09Единственный — с точки зрения попытки причинения минимального общего ущерба.
Причастность к ДТП определяется только с момента его (ДТП) возникновения, а до этого есть участники ДД, часть из которых, возможно, уже нарушает ПДД, хотя и это не факт.
Если на вас сзади летит Камаз без тормозов, а вы притормаживаете на перекрёстке, у вас, к примеру, выбор:
1. Остановиться и получить удар сзади. Сильный. Скорее всего — вылететь на тот самый перекрёсток под колёса других машин.
2. Осмотреться на перекрёстке и проскочить его в любом направлении (самое безопасное — уйти в правый поворот, либо на обочину, но уже проехав стоп-линию). В кого там влетит Камаз вас уже не волнует, вы не стали участником ДТП и не являлись его причиной.
Ваш выбор? По ПДД должны тормозить перед светофором и ждать удара.
По жизни — лучше проехать на красный свет, пусть даже допустить боковой удар в непричастный а/м (а через секунду после вас на перекрёсток вылетит тот самый Камаз).
Понятно, что это всё частности и вероятность их возникновения у конкретного водителя невысокая, а вот у массовых беспилотников такое будет происходить уже раз в неделю-день-каждый час (если взять десятки миллионов машин) и станет очень заметно.igormich88
19.10.2017 16:28Ок, допустим в этот момент переход на зеленый свет переходил пешеход который не распознавался ИИ (бежал, был в тёмной одежде и так далее). Кто в таком случае будет виноват в наезде на него, и сработает ли тут формулировка «В случае удара Камаза по автомобилю сзади пешеход получил те же травмы».
vp7
19.10.2017 16:45Теперь понял вашу логику, спасибо.
Возьмём вашу ситуацию — если грубое нарушение ПДД с вероятностью 70% спасёт жизнь водителю, но при этом с вероятностью 5% убьёт пешехода (которого водитель не видит), то:
— живой водитель скорее будет действовать по принципу, что в худшем случае — «лучше плохо сидеть (в тюрьме), чем хорошо лежать (в гробу)»
— автопилот будет следовать правилам, т.к. в случае ошибки (те самые 5%) у компании-разработчика будет масса проблем
И… как пассажир при прочих равных я выберу такого водителя, который будет защищать собственную (а заодно и мою) жизнь.
Отсюда же следует вывод, что беспилотники получат признание, когда степень их аварийности действительно станет существенно ниже, чем у живых водителей. Тогда им будет простительна беспощадность в таких вот случаях.

bars_arseniy
18.10.2017 16:17Вы предполагаете, что будет только одна эта формула?
Я думаю, в своей работе Mobileye предусмотрели больше чем одну формулу. И/или ускорение и замедление в формуле не зашиты жёстко для автомобиля, а, например, корректируются с учётом окружающих условий.
А здесь в статье неполный пересказ.
Maximuzzz
18.10.2017 17:50И вот тут, как мне кажется, начинается «лукавство» или пересказ очень не полный. Допустим эта формула поддерживается другими, но где взять те самые «время до полной остановки транспортного средства при максимальном торможении»? Из каких таких источников можно получить данные приближенные к реальности, если, как упоминается, нет связи со вторым ТС? Статистически как раз и можно набрать эти значения, при том, что это все равно плюс минус трамвайная остановка, но обученный алгоритм скорее пройдёт по нижней «безопасной» планке. А вот как в чётких формулах учесть состояние покрышек другого ТС, тормозной системы, состояние водителя я даже не представляю.

x67
18.10.2017 19:13Тут все намного проще — использовать подходы классической теории управления. Важно понимать два нюанса — важен правильный выбор регулируемых величин и даже при таковом не всегда получится оптимально управлять объектом, если утрировать, то не всегда получится и сбросить скорость и избежать аварии. Статистика и нейросети нужны как минимум для понимания, как надо управлять. Например, если сзади фура, тормозить надо сильно заранее и с меньшей энергичностью. А как максимум для умного эвристического управления, когда выбираются не только параметры действий, а и стратегии управления (свернуть влево вместо торможения, когда это поможет избежать аварии и тп).
idiv
18.10.2017 20:54+1где взять те самые «время до полной остановки транспортного средства при максимальном торможении»
Эта величина ограничена ГОСТами в общем-то, а так считается для легкового автомобиля по формуле скорость?/200.
Можно еще добавить скорость реакции, 3*скорость/10.
Данные формулы из автошколы Германии, скорости в км/час.
Из таких формул можно вывести безопасное расстояние можно определить по формуле
скорость*время*коэффициент/4
время в городе 1 секунда, за городом — 2 секунды
коэффициент — 1 на сухой дороге, 2 на мокрой, снег или грунтовка — 4
Думаю у компьютера проблем не будет с такой задачей с гораздо более точными данными.
А вот как в чётких формулах учесть состояние покрышек другого ТС, тормозной системы, состояние водителя я даже не представляю.
На неисправном ТС выезжать нельзя на дорогу (такое никакие правила не предусматривают ни в одной отрасли). С состоянием водителя сложнее, выезжать нельзя, но может и в дороге поплохеть. Это уже исключительная ситуация и наличие нормальной системы контроля транспорта.Maximuzzz
18.10.2017 21:17Да, я с вами согласен. ГОСТЫ, корректирующие коэффициенты, это все элементарно. Можно даже ввести дополнительный коэффициент «расширенной безопасности» для дополнительной перестраховки. Но это все в основном защищает робомобиль и как следствие производителя от репутационных потерь в том случае, если по дороге вдруг встретится слепой, упоротый алкоголик, на лысых покрышках, в гололёд, едущий с превышением лимита раза в 2. Утрирую конечно, но вся защита, судя по заметке, именно в том, чтобы было проще доказать невиновность робомашины.
Hardcoin
19.10.2017 08:46Слепой алкоголик — это и есть те самые 10^-9. В большинстве случаев даже его можно объехать, но если нет — репутационных потерь для робомобиля никаких.
idiv
19.10.2017 19:32слепой, упоротый алкоголик, на лысых покрышках, в гололёд, едущий с превышением лимита раза в 2
Ну это или редкость (такое в Германии предмет новостей общенемецких) или страна третьего мира. В последнем случае внедрение робомобилей явно не на повестке дня.

huankun
19.10.2017 13:32Если будет принят стандарт, то в течение лет 20 подавляющая часть авто будет со всеми необходимыми датчиками и системой обмена сообщениями о параметрах машины. Поэтому с обменом и вообще наличием информации вопрос встанет только в случае очень старых колымаг, которых будет всё меньше и меньше. Это выгодно и производителям, и пользователям. Причём для наличия таких датчиков/передатчиков не обязательно иметь водилой ИИ, их просто будут пихать во все новые машины. А люди будут предпочитать брать именно такие авто, а не старые, т.к. это потенциальное повышение безопасности.
Maximuzzz
18.10.2017 17:55Хотя, если использовать этот механизм не для повышения безопасности как таковой, а для выяснения кто прав, а кто виноват, то такой подход наиболее корректен. Распознаем марку автомобиля, делаем корректировку на погодные условия и понимаем, что если другое ТС в исправном состоянии, а водитель адекватен, то нужно Х метров, в случае аварии печатаем готовый анализ: «с точки зрения ПДД робомобиль прав, «казнить» человека-водителя»
Кстати, именно «безопасный» с точки зрения нарушения ПДД и перекладывания ответственности на водителя-человека описан сценарий с выездом с парковки. Формула не учитывает участников движения двигающихся с превышением ограничения скорости.

fzn7
19.10.2017 10:58Идея в том, чтобы отделить мух от котлет и в случае дтп дать четкий ответ произошла авария по вине автопилота, либо по объективным причинам
AndrewRo
18.10.2017 16:15А зачем уменьшать вероятность ДТП на три порядка по сравнению с белковым водителем? Мне почему-то казалось, что для допуска на ДОП достаточно уменьшить её на 0 порядков.

fireSparrow
18.10.2017 16:29С точки зрения здравого смысла — да.
А в реальности если пьяный водитель кого-то убьёт — это понятно и привычно, здесь нет никакого информационного повода. Но если в аварию попадёт автомобиль с автопилотом — сразу во всех новостях появятся сообщения «ИСКУССТВЕННЫЙ ИНТЕЛЛЕКТ УБИВАЕТ!!!111».
И даже если автопилоты будут в 10 раз реже попадать в аварию, каждый такой случай будет привлекать внимание.
BlackMokona
18.10.2017 16:36А, что изменит три порядка или пять порядков? От ошибок ГМО пострадало в бесконечное количество меньше людей чем от ошибок селекционеров, однако вой стоит всё равно адовый про вред ГМО и полный игнор обычной селекции
AndrewRo
18.10.2017 16:38Да и при 10^-9 в час первые ДТП произойдут практически мгновенно. И в новостях такие сообщения всё равно появятся. Но, думаю, через годик всё устаканится и всем надоест паниковать на эту тему. Не думаю, что с уменьшением вероятности что-то изменится.
Hardcoin
19.10.2017 08:52Только если на дороги выйдет миллион робомобилей практически мгновенно. В это вряд ли.
ntfs1984
19.10.2017 15:37В реальности если пьяный водитель кого-то убьет — он сядет, и будет выплачивать компенсацию родственникам. Что в свою очередь при должной формулировке законов, сокращает численность потенциально пьющих за рулем (см. графики по странам, где чем строже законы, тем меньше подобных ДТП).
Если автопилот кого-то убьет, то компания наймет армию юристов (благо она может себе это позволить), которые обхитрят одного прокурора, и тогда уже сядет… труп, или его родственник не удостоверившийся что труп вышел в светоотражающем костюме, или начальник дорожной службы который не там указал поставить фонарный столб), в общем кто угодно, кроме автопилота.
Хотя могут показательно казнить автопилот командой format c:/ или как там у них :)

kablag
18.10.2017 17:59Если можно сделать лучше, то почему нет?
AndrewRo
18.10.2017 18:02Лучше, конечно, больше. Но достаточно и текущего уровня безопасности.
idiv
18.10.2017 20:55Так тогда возникает вопрос — а зачем тогда менять? Машина то будет дороже.

worldmind
19.10.2017 09:51Со временем окупиться так как не спит и зарплаты не требует
idiv
19.10.2017 19:35Автомобиль в принципе является издержкой. Т.е. теоретические издержки должны стать меньше, но при расчете стоимости владения нужно учитывать стоимость и вероятность ДТП. Если она не отличается, то не окупиться, вполне хватит всяких систем предупреждений столкновений и парктроников.

lobzik_88
20.10.2017 18:27Робомобиль будет водить спокойней и более размерено, что является залогом хорошего расхода топлива. Не будет рвать с места, насилуя трансмиссию и резину, вместе с дорожным полотном, рационально расходуя ресурс агрегатов. Будет заранее тормозить, не перегревая тормозные колодки и диски, а может и вовсе будет тормозить мотор-генератором. Продолжать можно бесконечно…
Если он будет хоть на йоту безопасней водить и парковаться, это снизит стоимость владения, а может и страхования. Не малая часть ДТП связана с таким, как может показаться на первый взгляд, простым действием как парковка!!!
В итоге получим, автомобилем, условно более дорогим, дешевле владеть.
Вот зачем менять.

Iamkaant
18.10.2017 16:30> Так вот, чтобы статистическими методами гарантировать столь низкую вероятность смертности 10 ?9 в час, очевидно, нужно собрать 10 9 часов экспериментальных данных
По-моему со статистикой это умозаключение имеет мало общего. Нужно будет собрать намного больше экспериментальных данных. Впрочем, это только подтверждает выводы статьи.

vsespb
18.10.2017 18:53Честно говоря вообще не понял о чём статья.
Беспилотный автомобиль (синяя машина на рис. 3) чётко знает, какие коридоры должны соблюдаться до впереди идущего автомобиля и перед автомобилем позади. Если водитель-человек вторгнется в этот коридор, например, спереди (то есть подрежет беспилотник), а из-за резкого оттормаживания беспилотник столкнётся с автомобилем сзади, то виновником такого ДТП в случае разбирательства будет признан красный автомобиль с человеком-водителем за рулём.
ну и… эти коридоры такие и есть в обычных нынешних человеческих ПДД. перестроился слишком близко спереди, значит вынудил водителя тормозить (а он должен тормозить чтобы соблюдать дистанцию), а значит не «уступил дорогу». вопрос только в доказательстве этого, в измерении дистанции, в том на сколько сильно подрезанный должен тормозить и когда он из «подрезанного» станет тем, кого подрезали а он просто продолжил ехать без дистанции не предпринимая мер к её увеличению.
Рис. 1. Беспилотный автомобиль в центре ничего не способен предпринять для обеспечения гарантированной безопасности.
что имеется ввиду? он может снизить скорость и уйти из этой ловушки, если его, конечно, не преследуют специально.
При расчёте безопасного состояния и соответствующих осторожных действий математическая модель RSS учитывает в том числе ситуации, где объекты (автомобили, пешеходы и проч.) закрыты другими объектами. Например, на рис. 4 автомобиль осторожно выезжает с парковки с учётом максимально возможной скорости () автомобиля на дороге.
так и делают счас водители. что тут нового?

Cast_iron
18.10.2017 19:21Как три закона робототехники Айзека Азимова, только для ПДД.
В российских ПДД уже есть один такой закон:
пункт 10.1Водитель должен вести транспортное средство со скоростью, не превышающей установленного ограничения, учитывая при этом интенсивность движения, особенности и состояние транспортного средства и груза, дорожные и метеорологические условия, в частности видимость в направлении движения. Скорость должна обеспечивать водителю возможность постоянного контроля за движением транспортного средства для выполнения требований Правил.
При возникновении опасности для движения, которую водитель в состоянии обнаружить, он должен принять возможные меры к снижению скорости вплоть до остановки транспортного средства.
BalinTomsk
18.10.2017 19:58По идее паралелльно нейросети должна работать экспертная система — ведь например в северной америке не только есть федеральные, но и региональные и городкие ПДД и никакая нейросеть эти правила выючить не может, потому что они постоянно меняются.
Нейросеть должна перехватывать управление машиной в ситуациях когда ЭС не имеет для решения заданных правил, например точный учет габаритов обгоняемой машины.
Тогда по действиям ЭС, которая пользуется записанными правилами можно понять логику действий машины. Та же нейросеть может учить эксперную систему систематическим действиям.
Garbus
18.10.2017 20:26Что-то возникает мнение, что основной проблемой станет надежность&безглючность электроники. Ведь пока различные датчики на авто дохнут в разы чаще, чем случаются аварии со смертельным исходом… Будет ли автопилот внезапно на порядок-другой надежнее того что используется ныне? В пределах разумной цены естественно.
idiv
18.10.2017 20:58Будет ли автопилот внезапно на порядок-другой надежнее того что используется ныне?
Оффтоп. У xkcd есть решение.

NeoCode
18.10.2017 22:54Естественно, управлять автопилотами и должны математические формулы. Четкие и однозначные формулы, тщательно продуманные и проверенные специалистами и желательно даже прописанные в законодательстве. По другому и не может быть. Какие нафиг нейросети? Откуда все это?
erwins22
18.10.2017 23:12шел 3000 год, людей давно переварили, но математически выверенные формулы дорожного движения до сих пор не приняты законом.

Daddy_Cool
19.10.2017 02:13Поддерживаю! И кстати — я сильно извиняюсь, но что случилось? Предложенная формула и концепция находится на уровне 8-го класса школы. Формулу S=V*t знаем? Углы, синусы-косинусу знаем? Всё. Суть статьи в оценке безопасности в контролируемых условиях. С этим ИМХО проблем нет — если бы все ездили по правилам, то никаких аварий бы не было. А с этим-то и проблема — просвет под фурой это фура или пустота (от имени Теслы)? Развернуться пропустив всех — ну сорри, это я до ночи стоять буду, а вон та Тесла вдали — она ж видит, что я тут поворачиваю и времени для торможения у неё до фига (от имени фуры). И так далее.
Vitkouski
19.10.2017 07:58А мне более реальным кажется управление нейросетями с тщательно отработанной, типа описанной в статье, и продублированной системой безопасности. Автопилот может рулить и совершенствовать свои навыки, но за безопасность должны отвечать построенные на очень надежных алгоритмах системы, которые оптимально среагируют в случае возникновения критических ситуаций.
Это первое что пришло мне в голову, как только стали писать об автопилотах построенных не нейросетях.
tieonabe
19.10.2017 01:50Так на самой первой картинке грубое нарушение изображено. Синяя и зелёная машины нарушили правило про минимальную дистанцию следования. В Канаде такое стоит 4 штрафных балла (это дофига). По наказанию это ничем не отличается от превышения скорости на 30-50 км/ч. Понятно, что робоавтомобиль не должен нарушать ПДД, если мы хотим обеспечить безопасность.
mayorovp
19.10.2017 09:34Не факт. Могли и черная с зеленой нарушить.
tieonabe
19.10.2017 22:21Если чёрная резко ударила по тормозам, то синяя должна успеть остановиться за ней, если до того на правильной дистанции следовала. Если зелёная решит затем въехать в зад синей, то… Ну тут ничего не сделаешь. Но робомобиль никогда не защитится от глупых или злонамеренных водителей. Так-то можно представить что с 20 углов по всей окружности на неё поедут машины с целью столкновения.
Я, однако, понимаю картинку, что все они двигались в потоке, без резкого торможения. Если замечаем сброс скорости машиной впереди, то сзади мы замедляемся ровно настолько, чтоб дистанция сохранилась.

ruYeti
19.10.2017 08:49Как опытный водитель не могу понять, в чём трудность принятия решения на рис. 1? Синий беспилотный автомобиль (или же обычный водитель) должен, в первую очередь, заботиться о безопасной дистанции до ТС, которое едет в данной полосе/ряду перед ним. В данной ситуации он должен снизить скорость для восстановления безопасной дистанции. Стоит ли учитывать, что зелёный тоже не соблюдает дистанцию?
Конечно стоит, но не в качестве первостепенного фактора. Первостепенной является дистанция до чёрного. Если чёрный, по любой причине, нажмёт на тормоз «в кол» и произойдёт ДТП, виноваты будете вы. Если вам в зад въедет зелёный (не обязательно из-за массового торможения, может, у зелёного в принципе тормоза отказали или он сознание потерял), это будет на его совести и ответственности. Именно так собираются «паравозики»… Стоит одному держать безопасную дистанцию, «паравозик» разорвётся и предотвратит массовое ДТП.AlexGLT
19.10.2017 13:10Обычно паровозик — результат рваного ритма движения и отсутствия общей культуры вождения. Поток последовательно стартует и потом последовательно тормозит, но люди делают это резко. И в какой-то момент накапливается ошибка — избыточный разгон последнего и резкие торможения предыдущих. и отдельная история про въезд в вереницу стоящих машин.
griin
19.10.2017 09:23Начать, мне кажется, нужно с тог, о чтобы привести к общему знаменателю ПДД большинства заинтересованных стран (с отсутствием разночтений и круговых гиперссылок). Иначе придется региональные патчи законов робототехники накатывать.
idiv
19.10.2017 19:37привести к общему знаменателю ПДД большинства заинтересованных стран
Женевская конвенция. Общий знаменатель, на котором должны основываться правила.
worldmind
19.10.2017 09:55Фиг поймёшь о чём статья — расчёт тормозного пути это конечно математика, да только расчёта тормозного пути и дистанций недостаточно чтобы автопилот куда-то поехал.
Избавляться от нейронных сетей нужно, но в данном случае это возможно только созданием сети дорожных знаков который понятны машинам без нейронных сетей — типа rfid метод на знаках.AndrewRo
19.10.2017 14:22+1А ещё сети автомобилей с rfid метками, сети пешеходов с rfid метками и сети препятствий с rfid метками. Все ямы тоже быстренько rfid метками помечать.
worldmind
19.10.2017 15:28На самом деле достаточно чтобы на красный свет не выезжали из-за неправильно распознанного светофора и т.п., и уже будет весьма неплохо.
Машины точно надо снабжать метками — они должны обмениваться между собой дорожной информацией.
Может в распознавании ям и упавших деревьев нейросети останутся, но сферу их применения нужно минимизировать.
maa_boo
19.10.2017 12:11В душе не чаю к чему такой вой про беспилотники, если это только не касается распознавания участников движения?

mehos
19.10.2017 13:06Люди одновременно с Автопилотами не смогут ужиться на одной дороге. Если любой Автопилот выпустить где-нибудь в оживленном месте — он просто будет стоять на месте в попытках соблюсти дистанцию перед влезающими перед ним хамами. Ни один ИИ нельзя обучить тому, как и где надо в нужный момент подсигналить и не пустить наглеца.
Разработки вышеописанных стандартов — это очень хорошо. Но их принятие должно сопровождаться усилением контроля соблюдения ПДД. Сейчас же — полная анархия! (говорю за свой ареал, может где-то там ха океаном люди умеют хорошо ездить).maa_boo
20.10.2017 11:15> Ни один ИИ нельзя обучить тому, как и где надо в нужный момент подсигналить и не пустить наглеца.
ИИ как раз обучить проще. Ибо у него и сенсоры есть и время реакции гораздо меньше человеческого.
AlexGLT
19.10.2017 13:13Одним из важнейших факторов, влияющих на тормозной путь, является коэффициент сцепления с дорогой. Как исходя из формул робомобиль должен его определять не ясно.
Причем сцепление может меняться неожиданно.
В качестве примера, в солнечный летний день стартуя со светофора не мог понять почему машина не едет и противобуксовкой моргает, нажал на тормоз и переосмыслил свое поведение после мгновенного отклика АБС. А всего лишь на асфальте какую-то дрянь разлили на не очень большом участке.

dmitrygnenny
19.10.2017 13:45В описанной в начале статьи ситуации нейронная сеть, обученная на истории вождения живых водителей, просто плавно снизит скорость.
fivehouse
19.10.2017 14:38-1провал был неизбежен, потому что исследователи изначально поставили недостижимые цели и раздули хайп.
Ага. Теперь стали типа умней. Просто теперь сначала раздули хайп, а потом поставили недостижимые цели. У самых умных была самая достигаемая цель — сам хайп.


San_tit
Честно говоря, я думал так и делается: нейросетями распознают изображения, а потом математически рассчитывают траектории...
halfhope
Так и делается, по крайней мере у Tesla и других компаний, которые допущены для дорог общего пользования в Японии, США, Европе, заголовок просто немного вводит в заблуждение. По моему, у geohot-а проект автопилота на нейронной сети именно по этой причине сенат забраковал, потому что нейронная сеть это черный ящик. Отлично, что делают фреймворк, очень воодушевляет.
EvilPartisan
Если быть последовательным до конца, то по этой логике сенату следует запретить людей.
eldarmusin
ИМХО к этому нас и приведёт развитие.
Я полагаю что если автопилоты покажут ожидаемую надёжность, то году к 2030 в некоторых странах будет уже невозможно получить водительское удостоверение. То есть условно люди до 2012 года рождения всё ещё будут допущены на дороги в качестве водителей. Те что после 2012 года — будут допущено только как пассажиры автопилота.
В связи с этим человеческий фактор будет меньше влиять на аварии. Старики сами захотят избавиться от лишних действий, богачи избавятся от водителей, молодёжь наконец то сможет бухать всю ночь не боясь сесть в машину.