
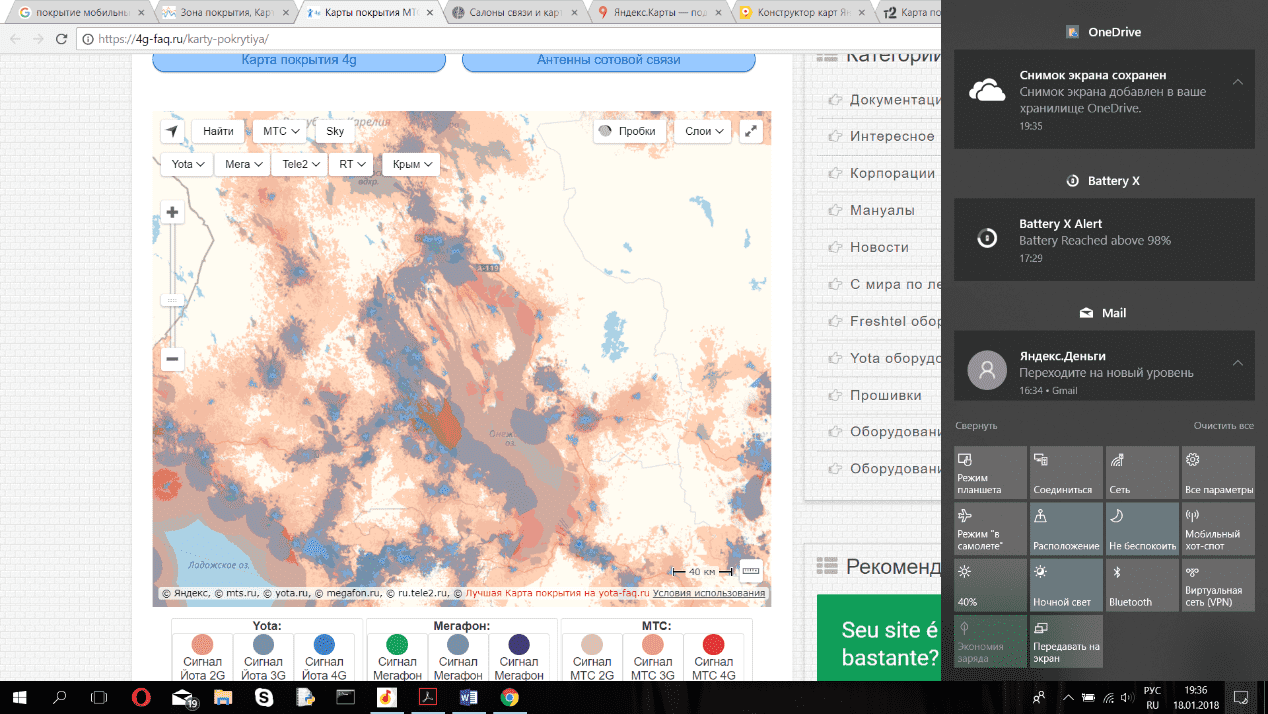
Она управляется через интернет, а сейчас мобильный интернет покрывает большую площадь России. Маленькие водоемы полностью им покрыты, а от берегов больших интернет есть на даже в десятках километрах от берега.
Также Илон Маск объявил о создании всемирного интернета.
Лодку я решил печатать на 3D принтере, модели сделаны в компас_3d. Код написан на python 3.
Cсылка на github.
Оборудование и материалы
• 3d принтер
• Одноплатный компьютер Raspberry pi
• 4g модемы (2 штуки)
• ноутбук (2 штуки 1-й — передатчик, 2-й — сервер)
• серводвигатели
• веб-камера
• двигатель
• аккумуляторы Pb
• другое (реле, паяльник, датчики, клеи, краски, герметики...).
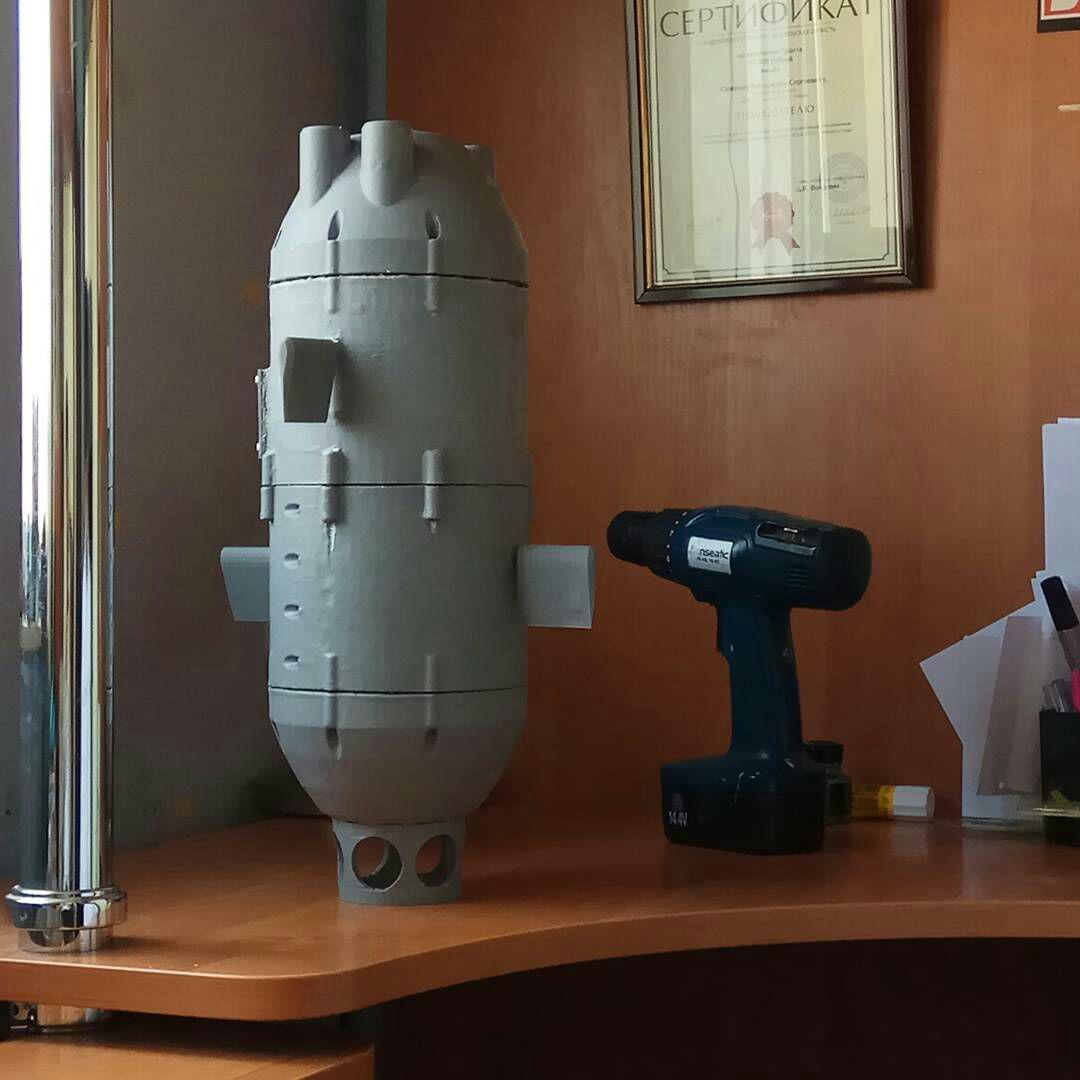
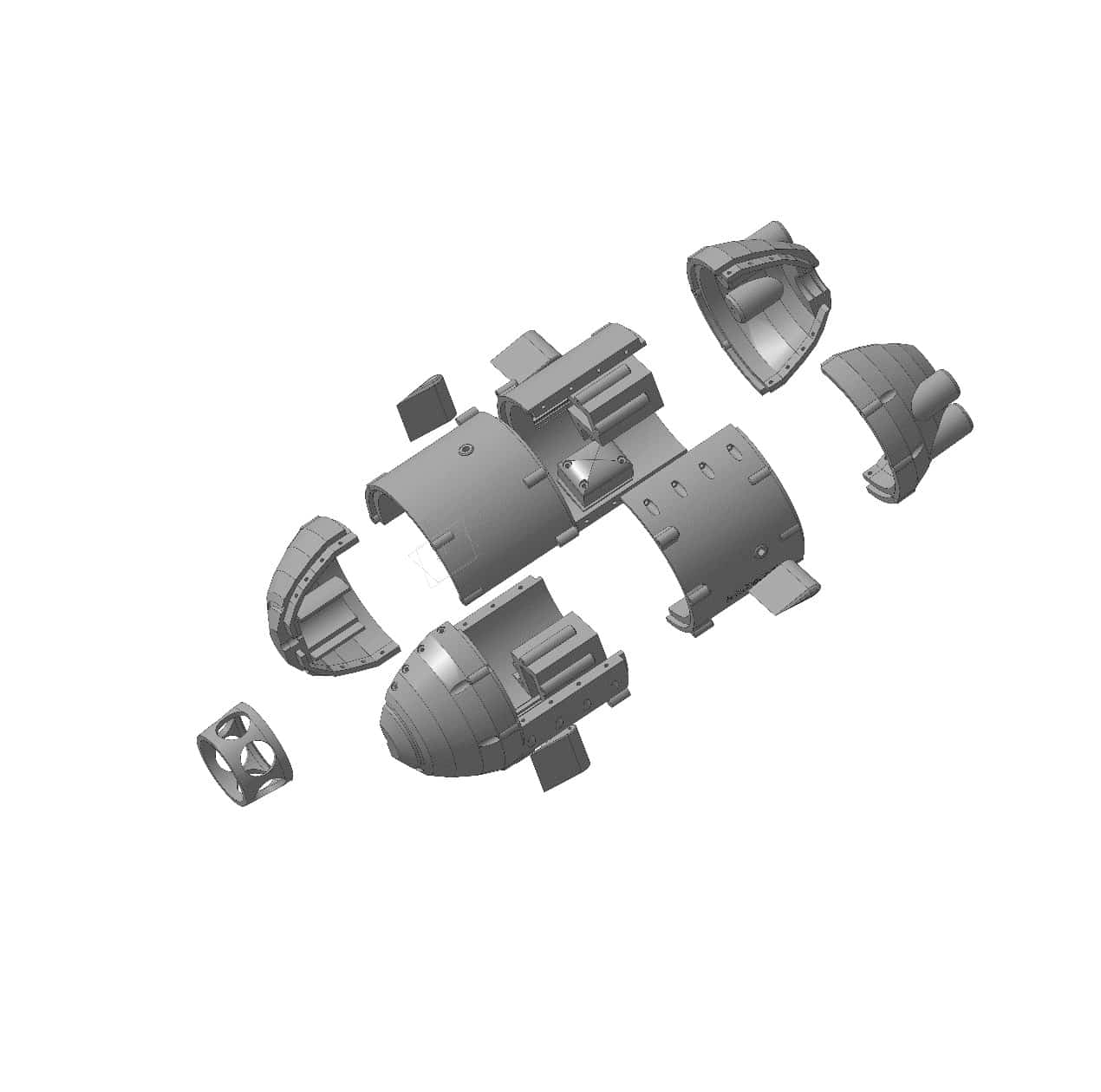
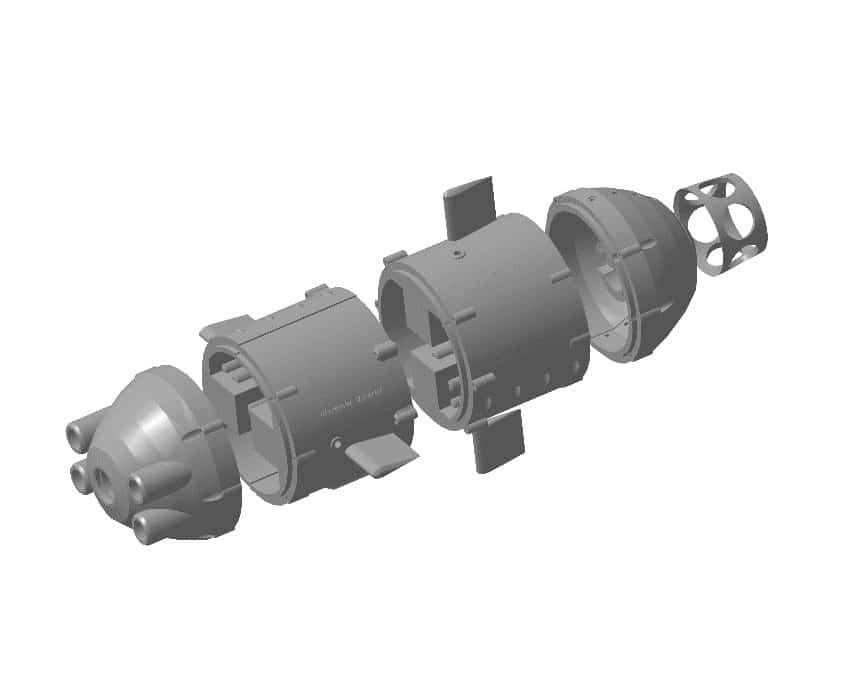
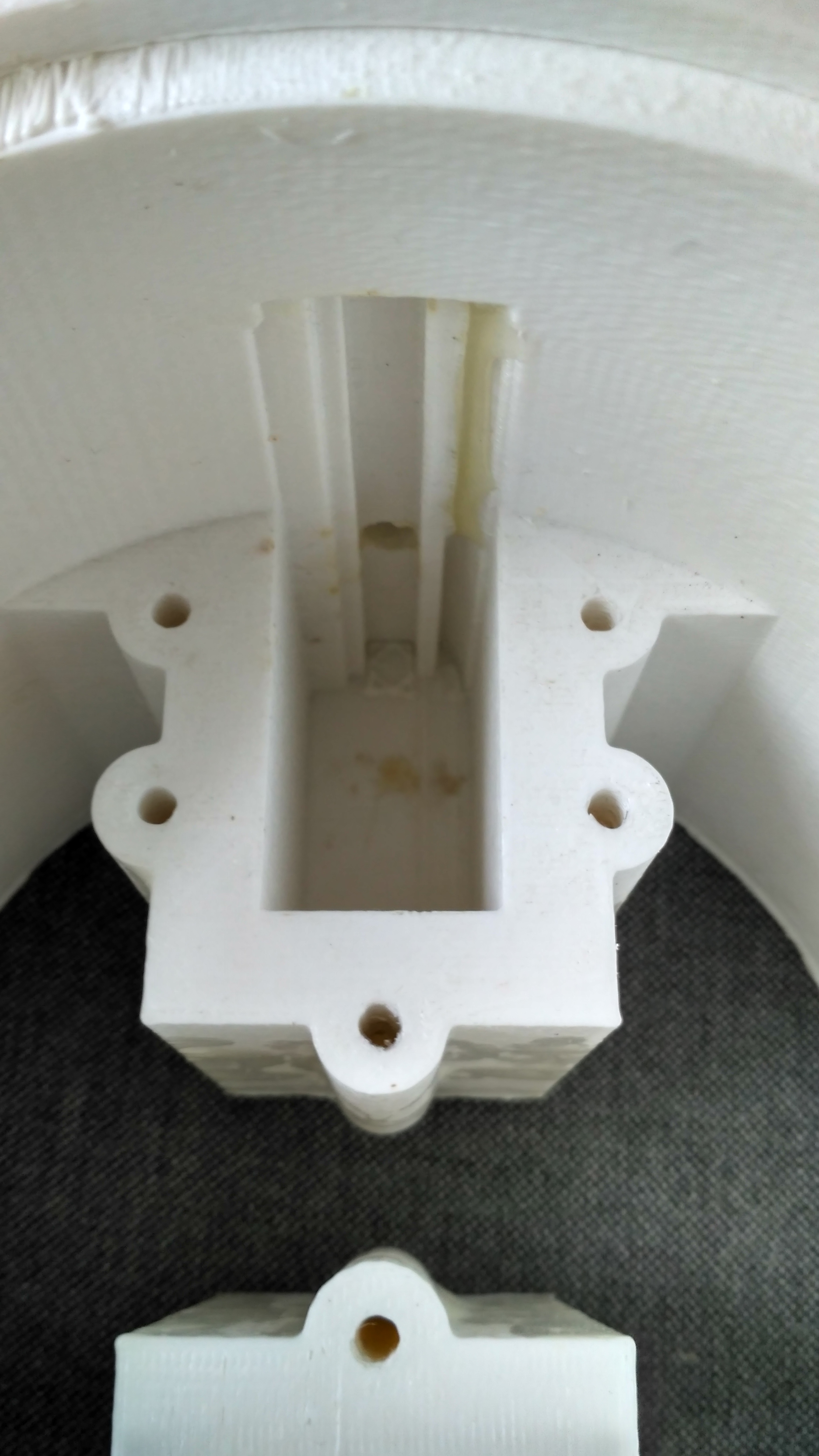
Детали
Как уже было сказано детали напечатаны на 3D принтере слоем в 0.3 мм соплом 0.4 мм
на алюминиевом столе с подложкой из клея бф2 для лучшей адгезии, самые долгие детали печатались около 14 часов. Снизу сборочный чертеж.
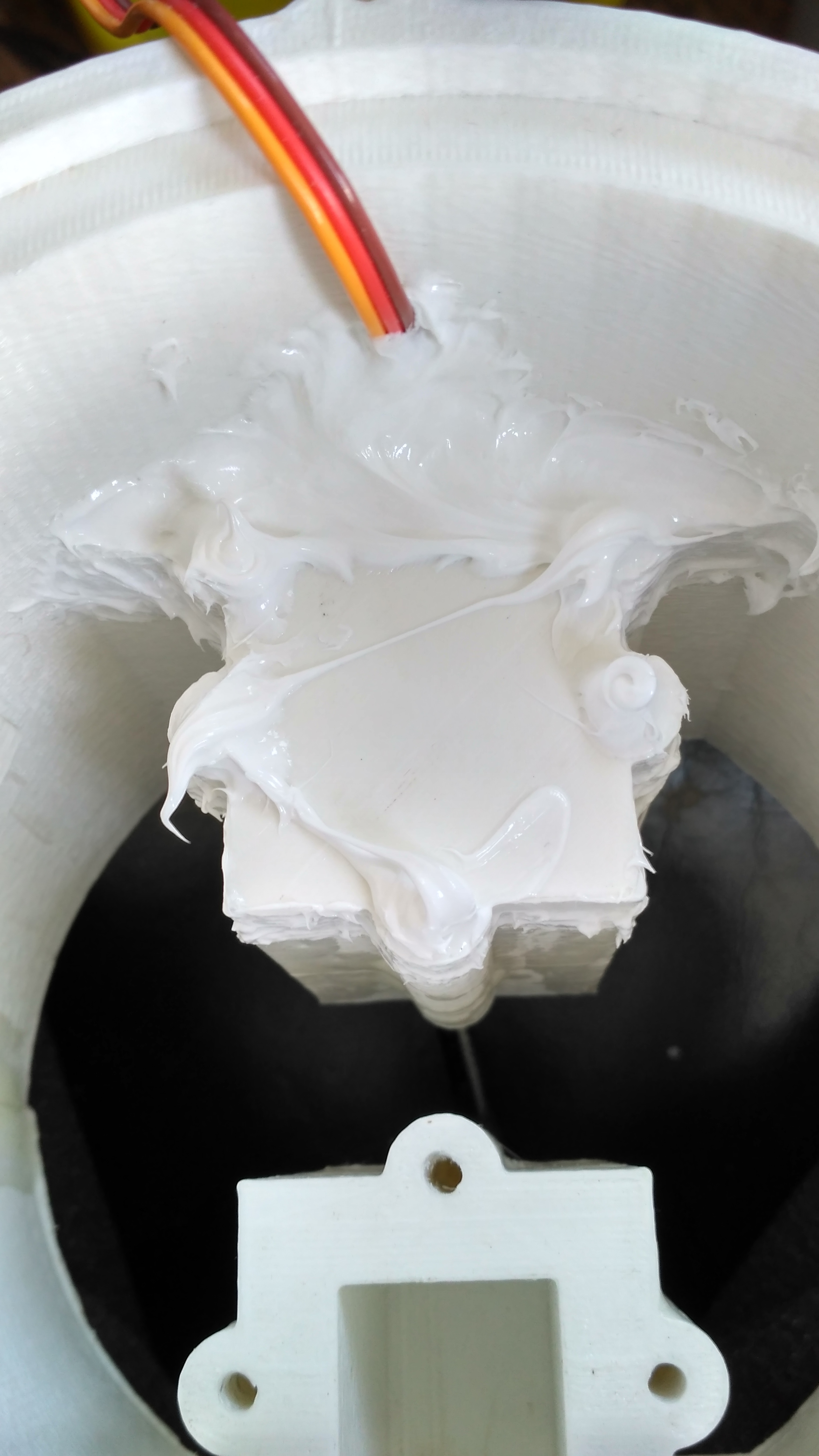
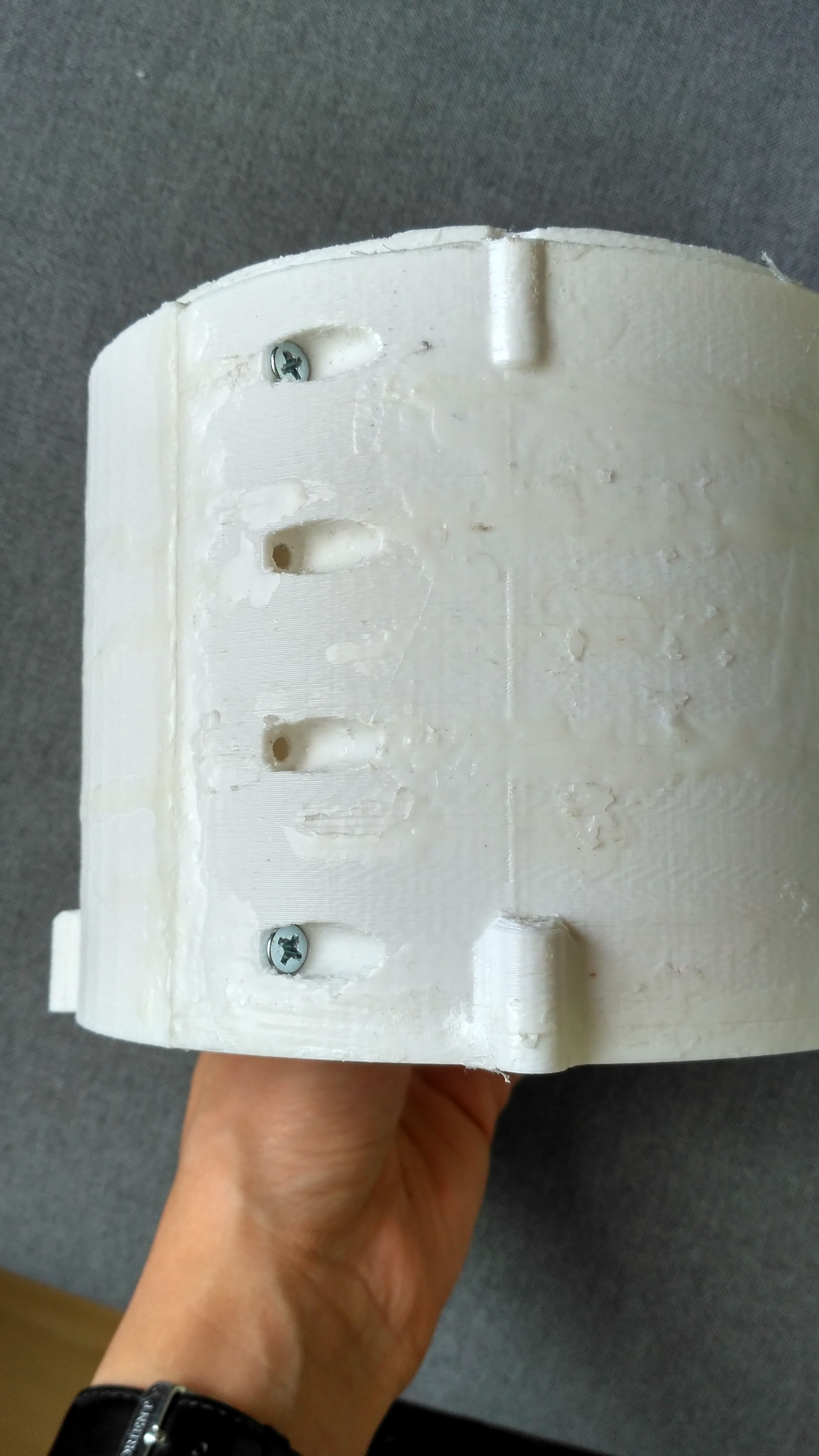
Герметичность
Для герметичности серводвигатели и ведущий бк двигатель загерметизированы силиконовым герметиком и густой смазкой. Сама лодка, из-за размеров своих деталей и склонности abs пластика к усадке (изменению размеров после печати), местами потрескалась эти места покрыты клеем для пвх, в местах болтовых соединений силиконовый герметик для аквариумов.
Питание
В качестве источника питания — две последовательно подключенных свинцовых батарей на 6 v способные выдавать 3.3 AmH, свинцовые батареи используются из-за того что они дешевле, меньше контактов для зарядки надо выводить за пределы лодки и также они тяжелые(лодка слишком объемная, а средняя ее плотность должна быть около 1000 кг/м**3).
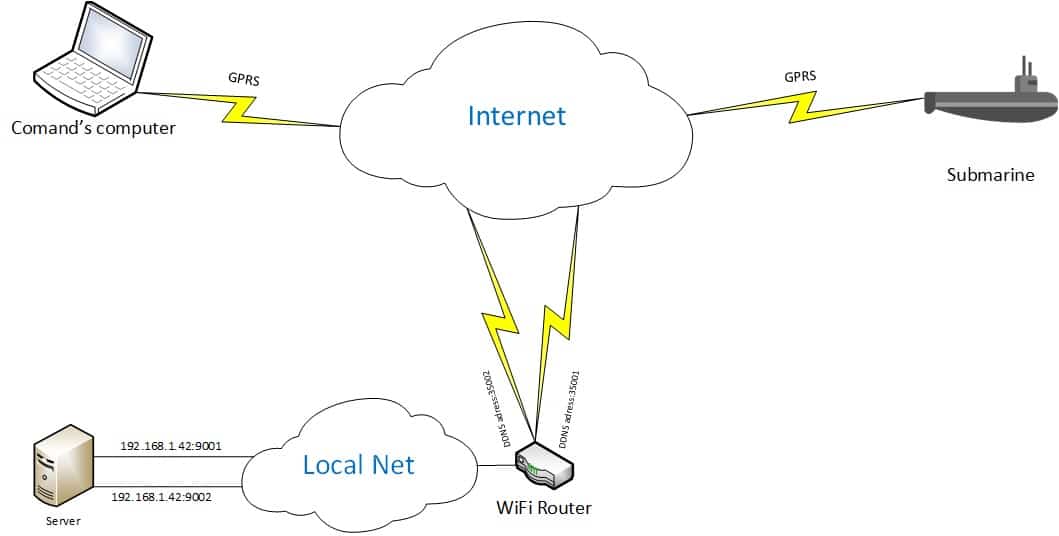
Передача данных
Теперь о главном, передача данных.
Так как вода поглощает ЭМВ то нужно выводить модем на верх, поэтому та лодка работает с поплавком.
В локальной сети, дома установлен сервер, передающий все поступающее на него с одного адреса на другой. На данный момент лодка передает видео, а ноутбук команды управления. Организованно это все через сокеты.
Так как мне захотелось сделать как можно больше всего, дабы было поинтереснее
while bytes('stop','utf-8') not in data:
image_result.write(data)#записывает картинку по 1 Кб в файл
data = sock.recv(1024)#принимает данные с сервера 1 Кб
if bytes('stop','utf-8') in data:
image_result.write(data[:data.index(bytes('stop','utf-8'))])#записывает в файл то что пришло до стоп слова
Воспроизведение картинки, и прием с камеры с помощью opencv. Сжатия никакого пока не происходит, поэтому задержка целых 9-13 секунд. Кнопочки управления написаны с помощью Tkinter.
3D модель дна
Вовремя загрузки 3D модели на github я увидел из чего состоит stl файл, и решил написать код еще и для создания 3d модели рельефа дна из списка расстояний до него снятых ультразвуковым дальномером (который еще не установлен).
solid
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 2 0 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 2 0 0
vertex 1 2 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 1 2 0
vertex 1 1 2
endloop
endfacet
facet normal 0 0 0
outer loop
vertex 0 0 0
vertex 1 2 0
vertex 2 0 0
endloop
endfacet
endsolid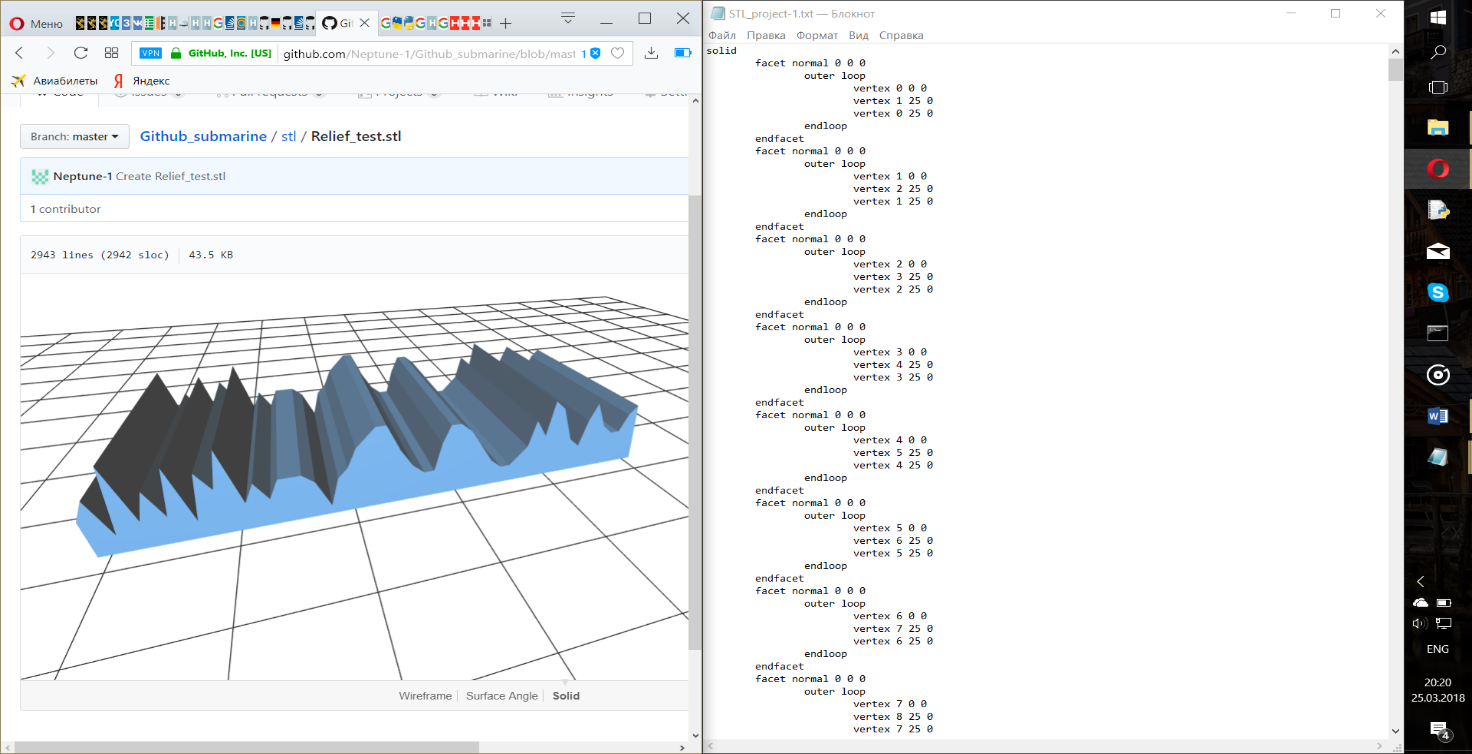
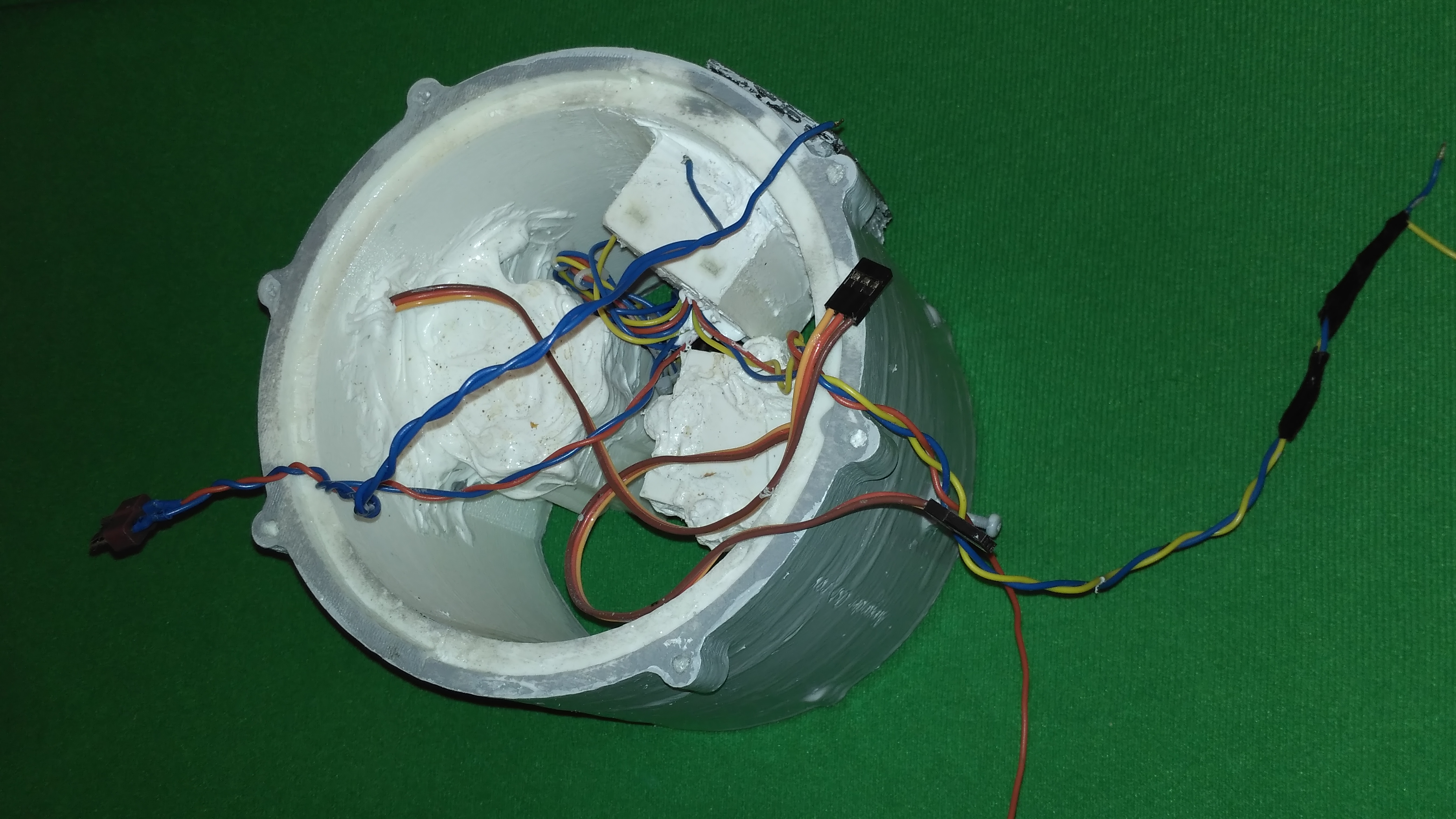
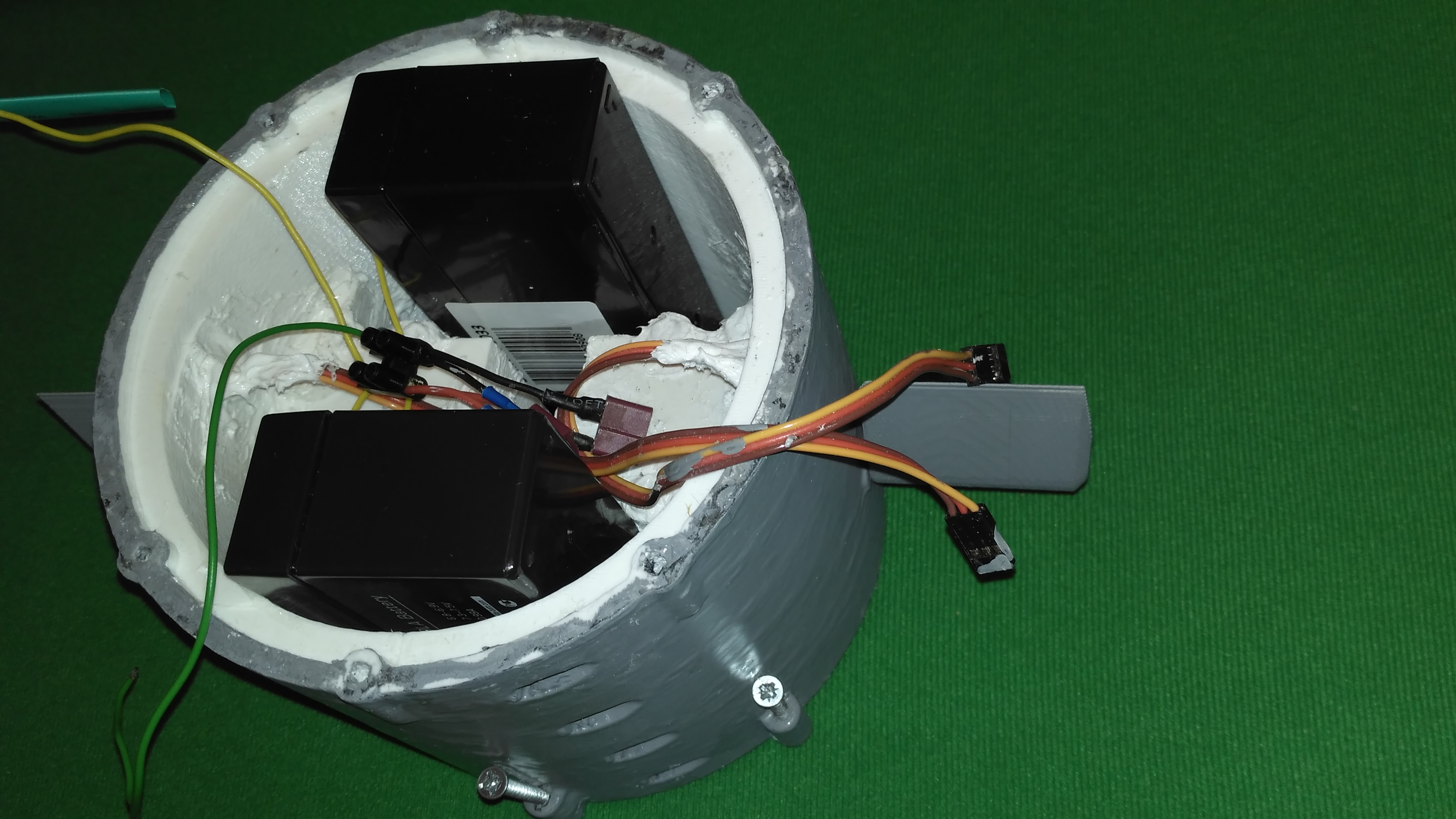
Далее идут фотографии интересные и не очень




Подведение итогов
Это собственно все что я хотел рассказать, основной моей идеей кто не понял было создание аппарата, позволяющего получать информацию из-под воды на огромном расстояние от управляющего ноутбука. Пока, до следующей статьи.
Комментарии (66)

wegres
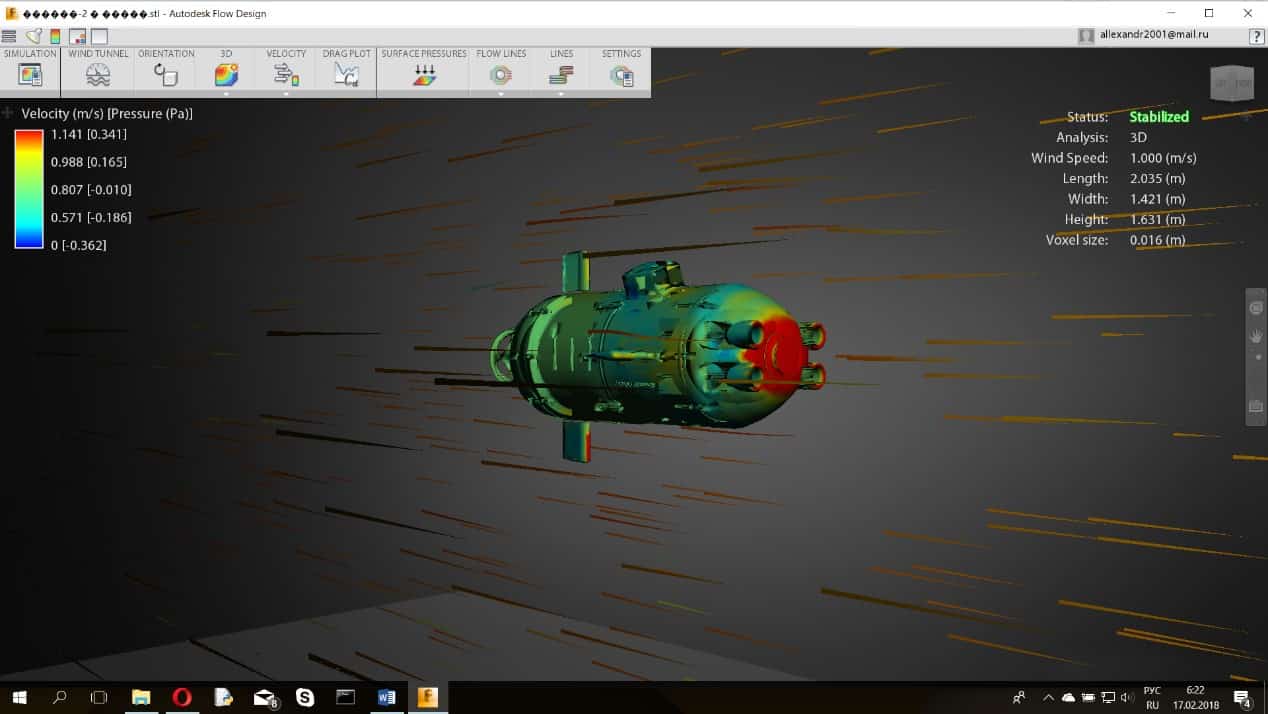
30.03.2018 19:19+1А почему название файла аэродинамика-1-min.jpg, а не гидродинамика-1-min.jpg? В воде всё же происходит.
Alexandr2001 Автор
30.03.2018 19:21Да, но гидродинамической трубы я не нашел, зато давление распределяется так же.
scifinder
30.03.2018 19:20+1Неплохо, но где фото готового устройства на боевом дежурстве? Или, хотя бы, видео, им снятое. Интересно же посмотреть.
Alexandr2001 Автор
30.03.2018 19:24-1Аппарат почти готов, но некоторые вещи еще надо до делать, поэтому заплыва еще не было.
colscy
30.03.2018 19:22+1Есть привязка к GPS? Проходили ли реальные испытания системы управления через интернет? Я каждый год путешествую по Ладоге, покрытие в основном 3G у населенных пунктов, но мощность сигнала быстро падает с удалением и даже небольшие фотографии передаются довольно долго. На мой взгляд при низкой освещенности на глубине и небольшом весе передаваемого кадра эффективное прямое управление маловероятно. А вот если такая лодочка в автономном режиме путешествует, фотографируя дно или сканируя его ультразвуком а при попадании в зону хорошего сигнала передает накполенную, а лучше уже обработанную (то есть с выделенными интересными объектами) информацию — это может быть интересно. Впрочем, описанный автором вариант может неплохо себя показать в курортных районах, с хорошим покрытием и большой освещенностью дна на мелководье.
Alexandr2001 Автор
30.03.2018 19:30GPS нет, испытания только лабораторные, над автономностью думаю уже давно, пока осваиваю машинное зрение, чтобы осуществить задумку.

Darth_Biomech
30.03.2018 19:28+1Ну, а фотографии напечатанных деталей? Сборки? Первого рейса, в конце концов? Хотелось бы больше помимо самой идеи процесс сборки почитать.
vassabi
30.03.2018 19:55хмммм, насколько я знаю — летающие бепилотники больше определенной массы должны быть зарегистрированы и так далее.
А плавающие?DASM
31.03.2018 00:40Неактуально, встречи с электоратом под водой пока еще редкость. А вот с воздуха, да еще и при скорости аппарата под 100 км час и малых размеров… даже странно, что в мире не стало парочкой президентов меньше. Правда, как с таким бороться? EMI пушки мало помогут, квадрокоптер (допустим) последний участок летит уже автономно, охрана из табельного его не то что не собьет, даже заметить толком не успеет.

Konachan700
30.03.2018 20:03Классная идея. Питание можно сделать, поставив внутрь генератор, и вытащив за пределы корпуса мягкие силиконовые крылья со скелетом внутри — волнение его неплохо крутить будет, а силикон не даст протечь соленой воде к механике. Автономность будет фантастическая.
Только подводная лодка — не лучшая идея в районе активного судоходства — можно легко под винты угодить тросом поплавка…

Areso
30.03.2018 20:12Напишите, а какова была цель? Ну и автономность — сколько часов?
Alexandr2001 Автор
30.03.2018 20:18По расчетам время работы 2-2.5 часа, цель — создание подводного аппарата позволяющего получать информацию из под воды из любой точки Земли, покрытой мобильным интернетом.

iliasam
30.03.2018 21:20из любой точки Земли, покрытой мобильным интернетом
Не так уж и много, с учетом того, что даже в Москве не везде есть устойчивый прием.

Osel_Ia
30.03.2018 22:16+1А где рули глубины, компенсаторы плавучести, гироскопы или другие устройства стабилизации? Что помешает лодке сразу в струйном течении, устроить беспорядочную циркуляцию? И как лодка будет выбирать маршрут, избегать коряг, плавсредств, сетей, водорослей, мусора, хищения, уноса течением обычной реки?
Alexandr2001 Автор
31.03.2018 07:40+1
лодка пока не автономна поэтому эти проблемы пока далеки, компенсаторов плавучести нет и не будет, зато гироскопы появятся в ближайшее время.
robux
01.04.2018 03:38Вместо компенсаторов плавучести на первое время можно сделать лодку чуть тяжелее, а поплавок с антенной побольше, в виде торпеды из пенопласта.

Alex_ME
30.03.2018 22:27Интересный проект, Вы зацепили прям за живое — я сейчас обдумываю идею надводной автономной лодки c
блекджекомc GSM, GPS и солнечными батареями. Сплавить ее вниз по Волге и следить за ее передвижением… А какую камеру Вы для снимков использовали?Alexandr2001 Автор
31.03.2018 07:22Камера из Ашана(магазин) за 400 рублей, для теста после первого настоящего теста поставлю получше.

Scarred
31.03.2018 19:51+1А не сопрут через пару деревень?
Alex_ME
31.03.2018 21:33Да, собственно, в этом и риск. Или налетит на что-нибудь, застрянет. В целом, лодка почти что одноразовая — своим ходом подняться против течения вряд ли она сможет. Собственных сил предполагается только на удержание форватера, чтобы ее не прибило к берегу или к острову через пару километров. Тут только пытаться найти
еще одного безумцакого-нибудь, кто сможет ее выловить ниже по течению.
mikkab
30.03.2018 23:19идея с 3g интересная, но много нюансов с поплавком: течения, изменением глубины и тд. тянуть за собой посторонний объект может быть затруднительно.
а почему не использовали ArduSub например?Alexandr2001 Автор
31.03.2018 07:15Не использовал, так как не знал о ней, но проект интересный и очень похожий на мой, спасибо.
denis64
30.03.2018 23:22По моему в таком интересном проекте стоит начинать как раз с испытания корпуса в воде. Как будут дела со стабилизацией и маневренностью. Так же немаловажна ремонтнопригодность в полевых условиях. Ещё одна большая как мне кажется проблема это автономный обход рыболовецких сетей.
Alexandr2001 Автор
31.03.2018 07:29Испытания на стабилизацию я провел в виртуальной аэродинамической трубе(посмотрел как распределяется давление), ремонтопригодность в полевых условиях плохая(нет возможности быстро поменять двигатели), автономности нет, поэтому обход рыболовецких сетей пока вручную.
VladSK
30.03.2018 23:38+1Делал в своё время почти подводную лодку. И с винтом наступил на грабли, на которые, возможно, при гребных испытаниях, наступите и вы.

Винту желательно дать сквозной доступ потока воды, а не под 90 градусов. У меня винт, почти лежащий на плоской стенке, в итоге начал работать скорее как центробежный насос, и вне зависимости от направления вращения основной поток воды затягивало в винт и разбрасывало в стороны, в результате при любом направлении вращения лодка шла назад. В итоге пришлось пересматривать конструкцию винта, относить его подальше от стенки, чтобы эффект центробежного разгона потока в стороны не превалировал над разгоном струи вдоль винта.
Alexandr2001 Автор
31.03.2018 08:14Из чего винт?
VladSK
31.03.2018 17:17PLA, печатали
Alexandr2001 Автор
31.03.2018 17:21Но ведь pla биоразлагаем.

Alexklmn
31.03.2018 18:19Делал эксперимент — деталь на печатаная PLA, специально с с множеством отверстий(чтобы влага не стекала) 2 года на улице, под дождем и солнцем. Ничего не биоразложилось к сожалению или наоборот… Может конечно и не PLA, пластик был из Китая, но не ABS это точно(не растворяется ацетоном)
VladSK
31.03.2018 19:32Как уже выше написал, все нормально с ним. Несколько лет постоянно что то печатаем и используем в разных условиях, деградации не наблюдали кроме как в растворителях.

Dima954
31.03.2018 15:50+2Винт нужно разместить в трубе, и две трубы вынести на поворотных или жестких консолях симметрично, например можно совместить с рулями глубины.
Все ужеукраденоизобретено до нас.
Гуглите «пропульсивный КПД» или столкнетесь с тем, что лодка вообще никуда не пойдет.
Вкратце — ходовой винт должен быть как можно меньше «затенен» корпусом и желательно при этом обеспечить ламинарный характер обтекания корпуса.

JhonCar
31.03.2018 09:35Вот идея у человека, который конструирует и шхуну и ROV: www.youtube.com/user/submarineboat

r00tGER
31.03.2018 09:42Когда-то обдумывал проект автономной подводной лодки с судном-ретранслятором на поверхности. В качестве связи судно-ПЛ использовать ультразвук.
JhonCar
31.03.2018 10:12Или вот интересный проект, построенный на ардуинах: www.techmonkeybusiness.com/tag/rov.html

Zmiy666
31.03.2018 15:29занятная штука… пустить такую плавать в озере, чтоб она умела возвращаться к причалу и подзарядится… А пока плавает — картографировала дно и самое главное рыбу находила. Можно в любой момент времени узнать положение рыбы и построить графики зависимости местонахождения рыбы от погодных условий… вот с такой то штукой уж точно без улова не вернешься)

zoonman
31.03.2018 17:26А не пробовали реализовать связь на сверхдлинных волнах, как в настоящих подводных лодках?
Alexandr2001 Автор
31.03.2018 17:29Для таких частот нужны приемников огромных размеров.
zoonman
31.03.2018 17:37+1Можно магнитную антенну сделать. Не думали о таком варианте?

Javian
31.03.2018 18:05+1Для ДВ скорее всего передатчик мощный нужен. Магнитная для передатчика не годится.
Лучше пробовать ультразвуком — geektimes.ru/post/296179

Diordna
01.04.2018 23:38а можно узнать подробнее почему нужны большие габаритные антенны для длинноволновой связи?
Javian
02.04.2018 06:01Несимметричный вибратор
Или попросту штыревая антенна, представляет из себя «половину» симметричного вибратора, установленного вертикально.
В качестве длины вибратора, применяют 1, 1/2 или 1/4 длины волны.
Представляет собой рассеченную вдоль «восьмерку». За счет того, что вторая половина «восьмерки» поглощается землей, коэффициент направленного действия у несимметричного вибратора в два раза больше, чем у симметричного, за счет того, что вся мощность излучается в более узком направлении.
Основное применение, в диапазонах ДВ, КВ, СВ, активно устанавливаются в качестве антенн на транспорте.
Длину вибратора можно себе представить —Длинные волны — диапазон радиоволн с частотой от 30 кГц (длина волны 10 км) до 300 кГц (длина волны 1 км).
еще по теме Прием сверхдлинных радиоволн в домашних условиях

slopestyler
31.03.2018 22:38О, крутая статья.
Как раз летом думал сделать гексакоптер с такой же схемой для передачи видео.
Было бы интересно узнать, как реализовывалось подобное.Alexandr2001 Автор
01.04.2018 05:49На github 3 исходника для 3 компьютеров, поэтому перенести это на гексакоптер будет не очень сложно, если будут вопросы пишите.

sned
01.04.2018 07:24Идея проекта не нова.Реализация не жизнеспособна.
Зачем делать столько составных частей корпуса да ещё из слабенького печатного пластика?
Всё потечёт уже на глубине в пол метра.Alexandr2001 Автор
01.04.2018 07:26Идея не нова, именно поэтому статья называется, так как называется, пластик совсем не так слаб(abs прочный), насчет частей правда, но принтер маленький а изготавливать вручную не хотелось.

UA3MQJ
02.04.2018 12:10Я ждал именно этого: когда появятся изучатели водных глубин!
Спасибо за статью и удачи!
Javian
Как глубоко сигнал в воду распространяется?
wickated
20-30 см
tormozedison
Можно оптикой попробовать, будет глубже.
Alexandr2001 Автор
рассматривал эту идею, но идеально чистая вода мало где бывает, а в обычной мутной свет через пару метров исчезает.
REPISOT
то есть 20-30см это норм, а пара метров — мало?
Alexandr2001 Автор
Так ведь есть поплавок
fapsi
«Поплавок» с модемом и Arduino + гибкий Ethernet кабель до субмарины? Будет, конечно, несколько сложнее.
Alexandr2001 Автор
Да, но передавать видео будет гораздо сложнее, также автоматизация лодки станет сложнее.
Ainvain
С передачей видео не совсем понятны сложности — можно тогда на лодке вообще никакой управляющей электроники не размещать — только батареи (балласт), двигатели и веб-камеру. А в витую пару развести USB и управление.
Alexandr2001 Автор
По 1 кабелю нужно будет принимать видео, данные с датчиков и передавать данные для двигателей и осветительной техники, кабель толстый получится.