
С одной стороны — стоят защитники, которым нравится удобство конфигурирования и читаемость кода.
С другой — приверженцы писать все руками, которым важна скорость работы и бережное использование ресурсов.
Для того, чтобы расставить все точки над i — попробуем написать «Hello world» тремя наиболее часто используемыми путями CMSIS, LL, HAL. Оценим затраты (ресурсы контроллера, объем исполняемого файла, и конечно же время работы разработчика).
Статья будет состоять из нескольких частей:
STM32 fast start. Часть 1 ПО, материалы, Cube MX.
STM32 fast start. Часть 2 Hello World на HAL, настройка отладки в Atollic TrueSTUDIO
STM32 fast start. Часть 3 Hello World на LL
STM32 fast start. Часть 4 Hello World на CMSIS
STM32 fast start. Часть 5 Подведение итогов, сравнение HAL, LL, CMSIS.
Сначала давайте определимся с тем, что же мы собственно будем программировать, то есть найдем подходящее железо.
Идеальным вариантом будет бюджетная плата на STM32F103C8T6 микроконтроллере.
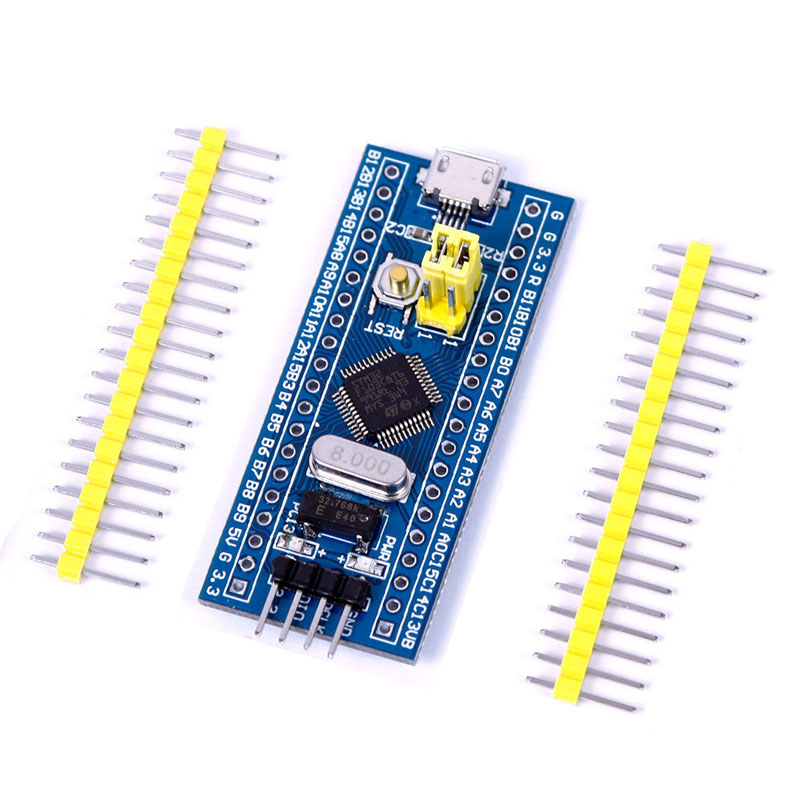
Данную плату можно найти на всем известном сайте по цене от 100 российских рублей.
Искать по ключевым словам: STM32F103C8T6 ARM STM32 Minimum
https://ru.aliexpress.com/af/STM32F103C8T6-ARM-STM32-Minimum.html?SearchText=STM32F103C8T6+ARM+STM32+Minimum?
Для того, чтобы залить прошивку и поиграть с отладкой — так же потребуется программатор
Для начала, да и для дальнейшего использования идеально подойдет китайский клон программатора ST-LINK V2.
Купить можно на том же сайте по цене от 120 российских рублей.

Искать по ключевым словам ST LINK Stlink ST 252dLink V2 Mini STM8 STM32:
https://ru.aliexpress.com/af/ST-LINK-Stlink-ST%25252dLink-V2-Mini-STM8-STM32.html?SearchText=ST+LINK+Stlink+ST%252dLink+V2+Mini+STM8+STM32
Для разработки ПО под STM32 можно использовать различные IDE.
Самые популярные — IAR, Keil, Coocox (Eclipse).
Мы же пойдем по пути, который с недавних пор абсолютно бесплатно и в полном объеме предоставляет сама ST.
Будем использовать Atollic TrueSTUDIO for STM32 или в простонародии «Толик».
Какие плюсы у данного ПО: абсолютно бесплатно, нет ограничения по размеру кода, есть неплохой отладчик, простая установка и настройка.
Минусы: нет авто дополнения кода.
Доступны версии под windows и linux.
Качаем здесь https://atollic.com/resources/download/
С установкой данного ПО проблем возникнуть не должно, все интуитивно понятно, выбираем куда ставить и жмем все время «далее».
После установки можно не запускать, так как помимо самой IDE нужно еще кое что.
Если все таки запустили — просто закрываем.
Так как TrueSTUDIO — это средство разработки и отладки, хотелось бы не собирать проект руками (подключая требуемые библиотеки и прописывая пути), а получить некий преднастроенный файл, в котором можно без лишних заморочек сразу же писать код.
Для этого применяется программа генератор кода Cube MX или в простонародии «Калокуб».
Данное ПО является первым камнем преткновения в холиварах на чем же писать под STM: на регистрах и CMSIS или на HAL.
Защитники первой идеологии приводят такие аргументы: Cube MX генерирует огромный, ненужный объем кода, который к тому же замедляет работу МК.
Защитники второй — заявляют, что автоматически сгенерированный код сокращает время разработки, позволяя разработчику быстрее переключится к сутевой части устройства (к основной логике), отдав рутинную настройку периферии на откуп специализированному ПО (Cube MX).
Как ни странно — обе эти идеологии правдивы и применимы на практике, но только каждая в своих условиях.
Давайте рассмотрим пару примеров:
Пример №1: Требуется разработать устройство, максимально дешевое, так как планируется производство партиями по 100500 шт ежегодно. Естественно, каждый лишний рубль цены устройства — выльется в сотни тысяч рублей затрат на финальном устройстве. При этом в планируемой разработке есть пара тяжелых расчетов и работа с периферией (ADC, SPI, UART) на максимальных скоростях.
Устройство является полностью автономным продуктом, в дальнейшем планируется минимальные изменения за весь срок производства данного оборудования. Срок разработки до получения готового образца — 1-2 года.
Пример №2: Требуется прототип устройства, который возможно заинтересует заказчика и он закажет 100 шт аналогичных устройств для переоборудования своего объекта. Первая планируемая партия должна быть отгружена заказчику через 2 месяца. Размер первой тестовой партии 10 шт.
Точное ТЗ будет корректироваться в процессе работы над проектом, но известно, что в дальнейшем планируется несколько переработок аппаратной части, под которую необходимо оперативно подстраивать всю прикладную логику.
В первом примере идеальным вариантом будет выбор максимально дешевого контроллера и написание аппаратно зависимого, но оптимального кода, где работа с периферией будет организована через обращение к соответствующим регистрам (CMSIS). Разработчик, который занимается данным проектом — должен обладать хорошими или отличными знаниями периферии конкретного семейства МК. В идеале — при попытке разбудить его ночью — должен сразу же назвать адрес требуемого вектора из таблицы векторов прерываний.
Во втором примере — выбор контроллера обусловлен имеющимся в наличии железом, а так же затратами времени для написания функционала требуемого заказчиком. Поэтому скорость работы и оптимизированность самого ПО отходит на второй план. Времени на ручную инициализацию нет, как нет времени и на проработку аппаратных зависимостей.
В таком случае выбирается контроллер, который можно быстро поставить в производство в текущем регионе, на нем делается инициализация с помощью Cube MX, пишется прикладная логика на HAL и прототип передается заказчику для тестирования. Такой проект может вести любой средний разработчик, который постиг навыки работы с целевым языком программирования. Вникание в тонкости работы периферии — практически не требуются.
Как бы это не печально звучало — в реалиях современной разработки устройств в России — пример №1 встречается все реже, передавая эстафету примеру №2.
К обсуждению примеров №1 и №2 вернемся в самом конце цикла статей, а сейчас продолжим с подготовкой рабочего пространства.
На данном этапе сделаем небольшую паузу, зайдем на сайт my.st.com и зарегистрируем на нем учетную запись, так как политика компании ST не позволяет скачивать необходимые материалы без регистрации.
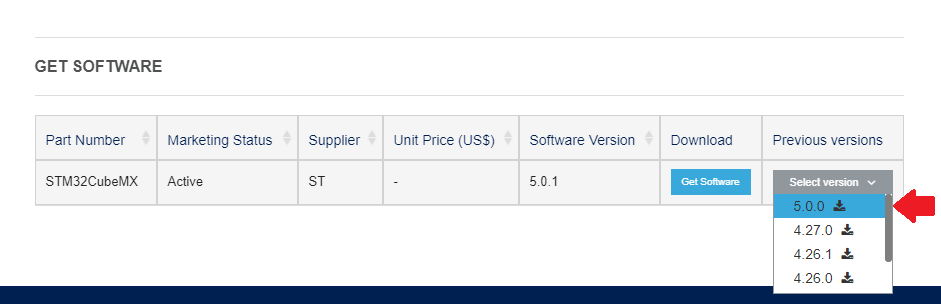
После того, как у нас появился доступ к сайту — скачиваем STM32 Cube MX.
В самом низу страницы есть кнопка выбора версии, нам нужна версия 5.0.0
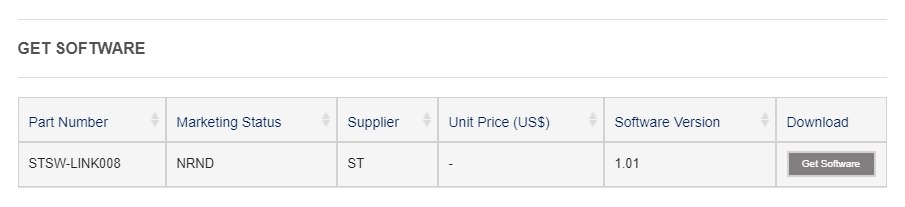
Попутно, пока мы не ушли отсюда, качаем еще две вещи, которые пригодятся в дальнейшем
https://www.st.com/en/development-tools/stsw-link008.html
Драйвер ST-LINK V2
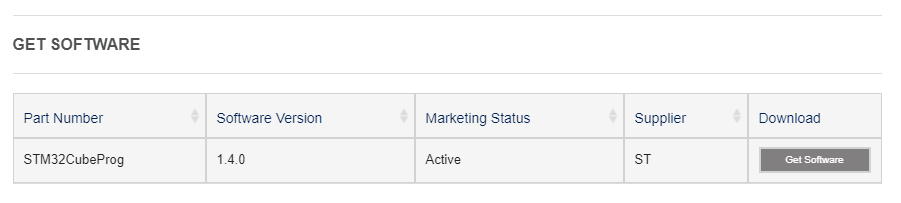
и https://www.st.com/en/development-tools/stm32cubeprog.html
Программа прошивальщик.
Установка драйвера, прошивальщика и самого Cub’a не вызывают затруднений, просто соглашаемся со всем и жмем далее.
После полной установки необходимого ПО — можем приступать к созданию проекта.
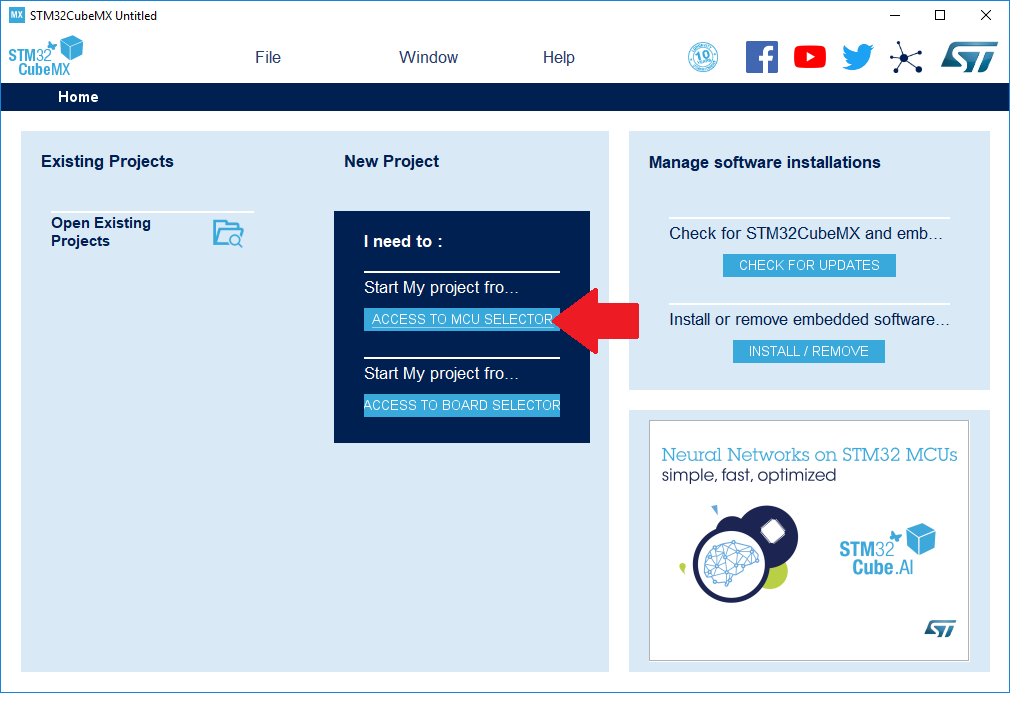
Для этого запустим Cube MX.
В появившемся окне нажмем на кнопку «ACCESS TO MCU SELECTOR».
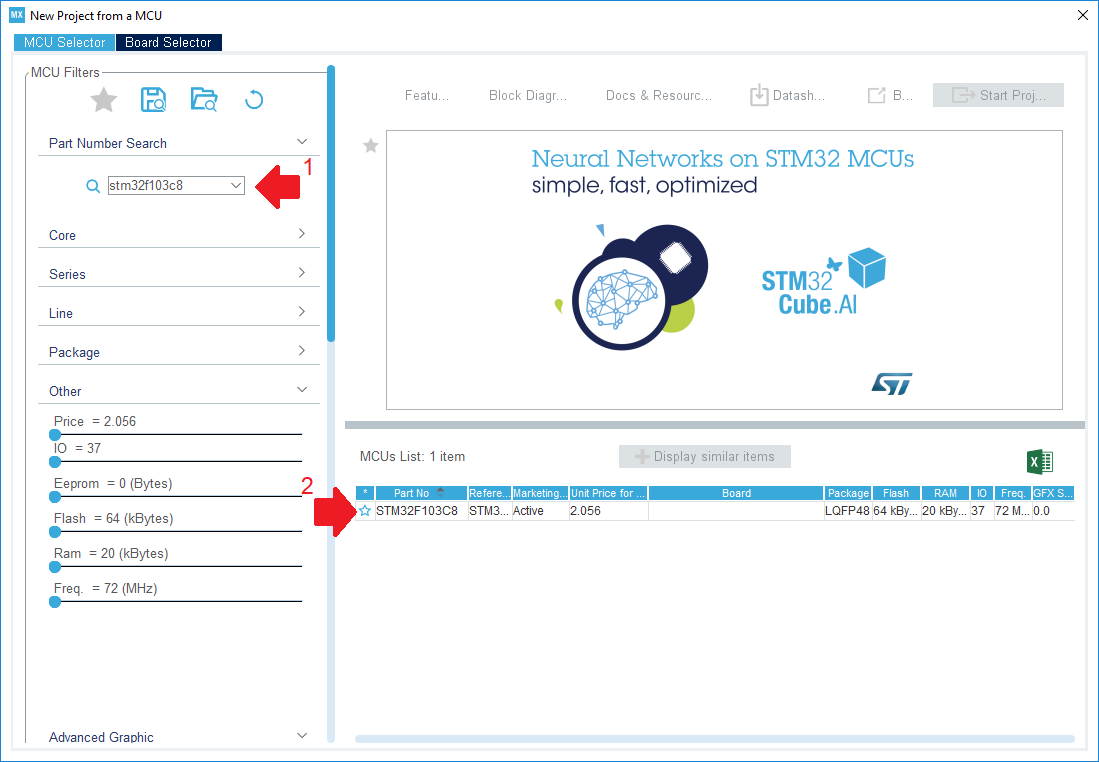
На нашей целевой плате установлен микроконтроллер STM32F103C8T6.
Введем его название в строке поиска и двойным щелчком выберем единственный найденный вариант.
В этой же таблице видно основную начинку нашего МК (64 килобайт флеша, 20 килобайт оперативы и пр).
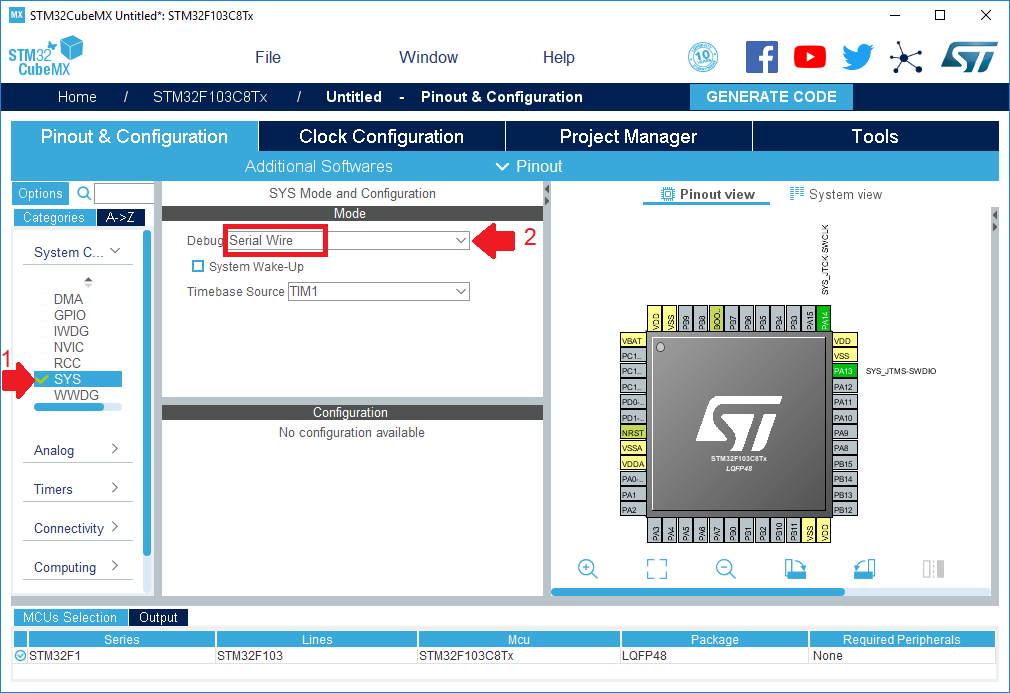
Перед нами появился схематически изображенный корпус контроллера с разведенными в разные стороны ножками.
На данном этапе необходимо обязательно выбрать способ подключения отладчика.
Для этого на вкладке Pinout & Configuration в левом меню выбираем пункт SYS а в нем в выпадающем списке под названием «Debug» устанавливаем значение Serial Wire.
При этом краем глаза замечаем, что программа зарезервировала для отладочных целей два пина на мнемосхеме контроллера.
Еще раз вспоминаем, что мы хотим помигать светодиодом на нашей плате.
Для этого необходимо сначала узнать, к какой именно ножке он подключен.
В этом нам поможет схема электрическая принципиальная:
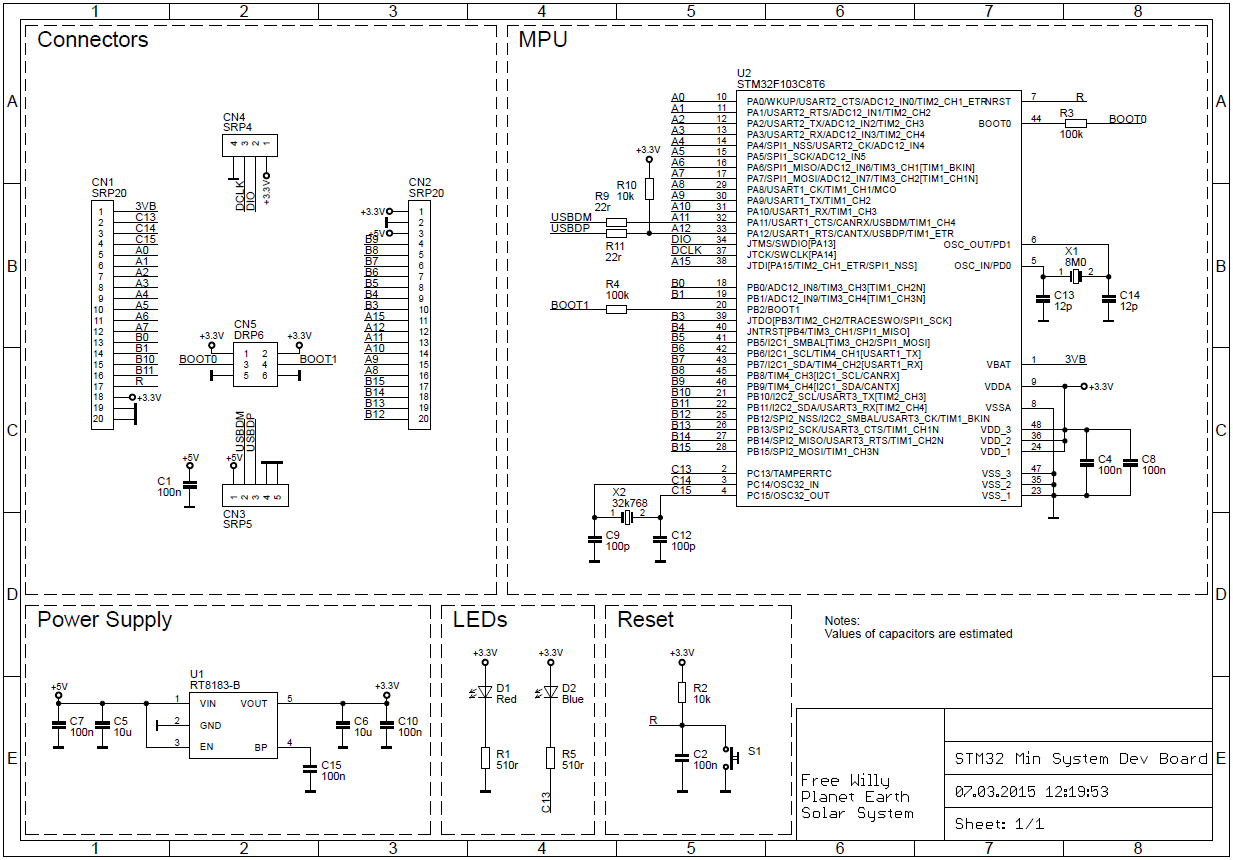
или более красочная и простая для понимания распиновка платы
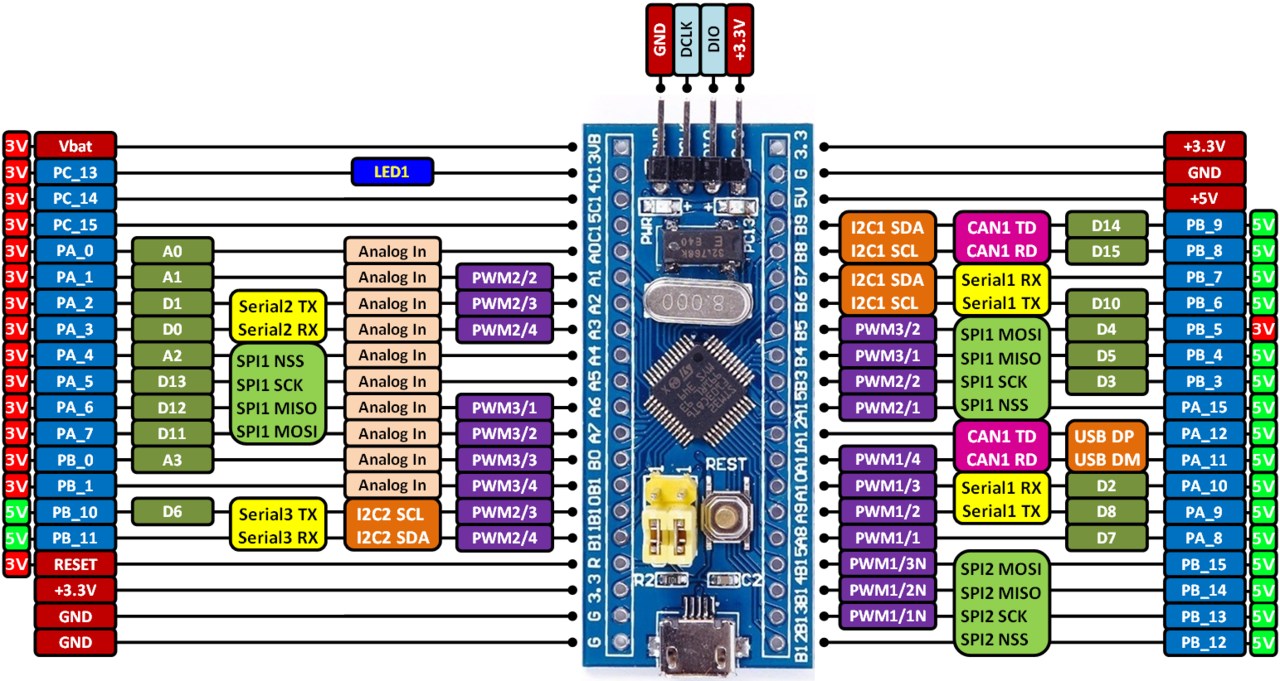
Искомый светодиод находится на ножке PC13.
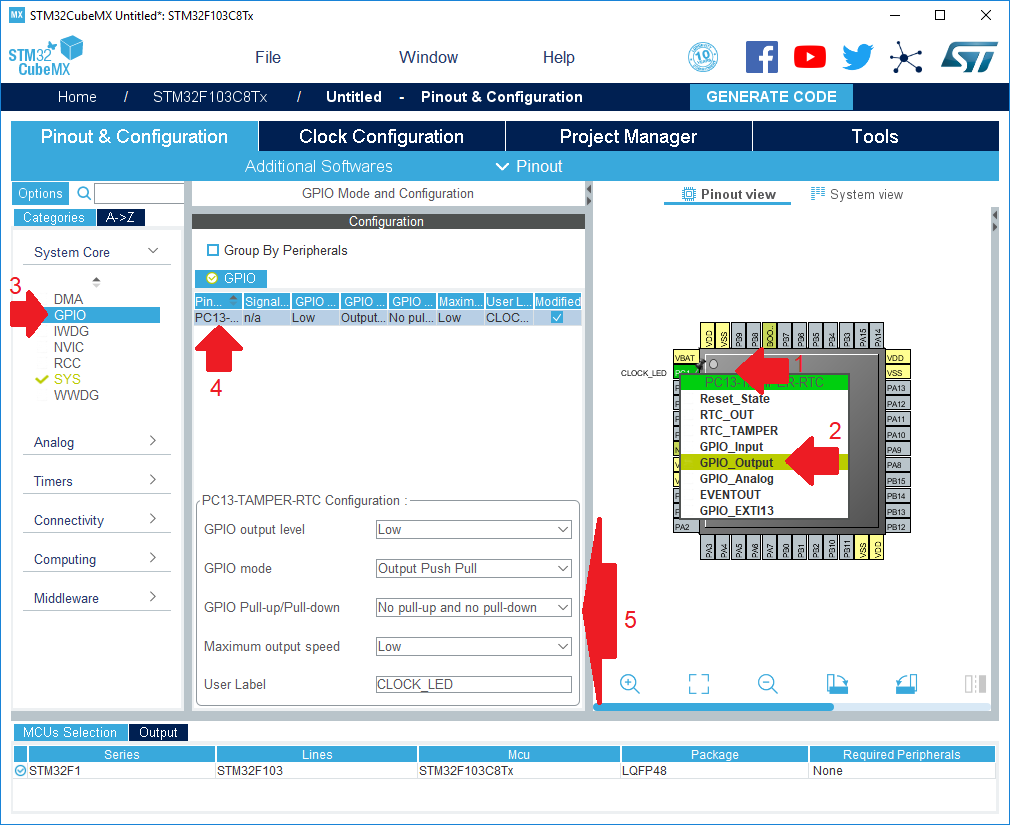
Соответственно, необходимо настроить данный вывод для работы в режиме выхода.
Для этого:
- Находим вывод на мнемосхеме
- Нажимаем на него правой кнопкой мыши, из выпадающего меню выбираем пункт «GPIO_Output»
- Переходим в меню GPIO,
- В списке выбираем PC13
- Заполняем таблицу PC13-TAMPER-RTC Configuration в соответствии со скриншотом, особенно нас интересуют параметры GPIO mode и User Label
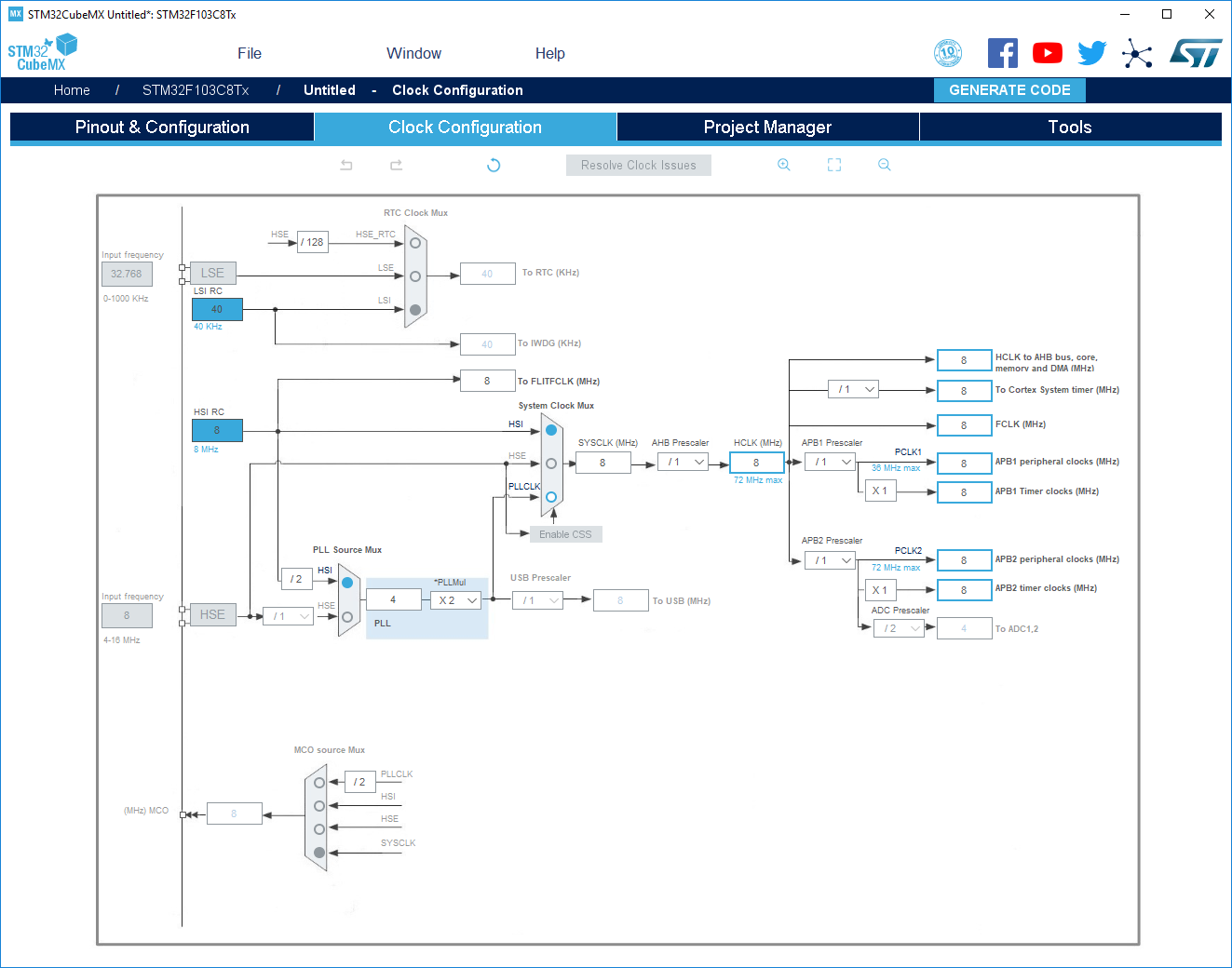
Продолжаем настройку проекта, переходим к вкладке Clock Configuration.
На самом деле это одна из важнейших вкладок, которая позволяет настроить параметры тактирования периферии, но пока не будем здесь ничего трогать, так как главная цель на данный момент не в этом.
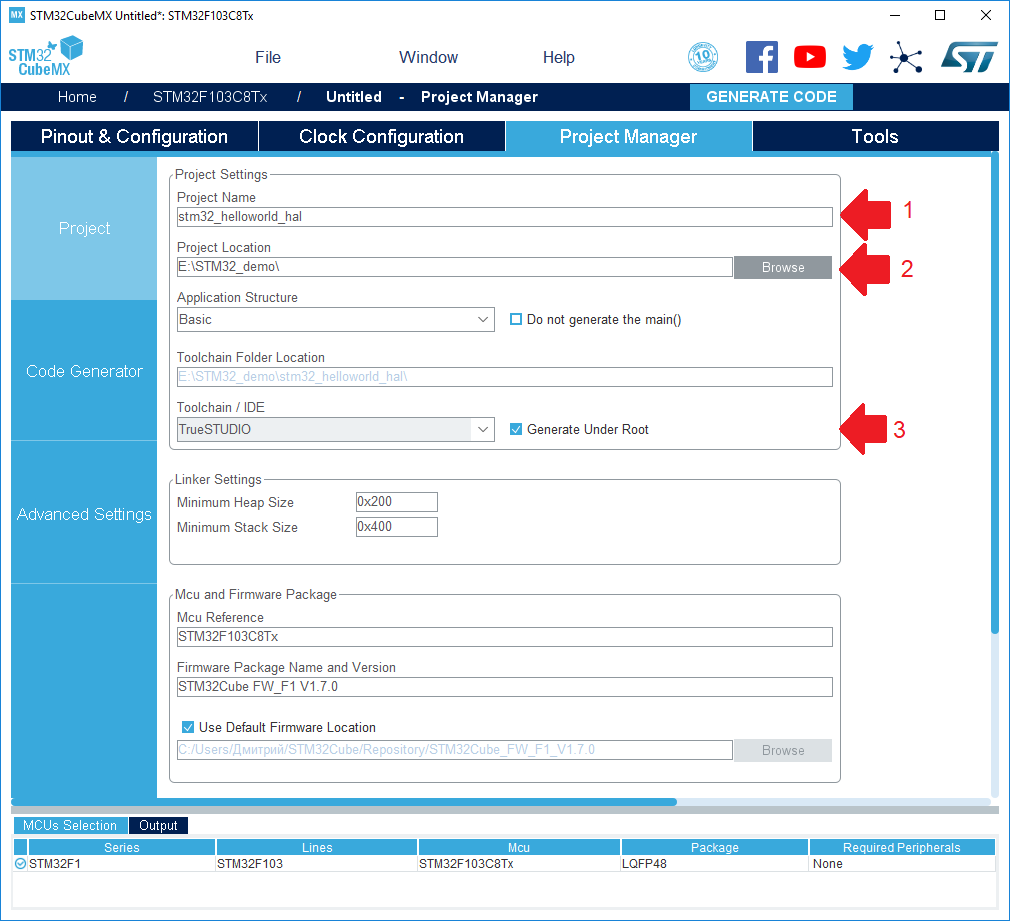
Переходим к вкладке Project Manager, под вкладка Project.
Обязательно заполняем следующие параметры:
- Имя проекта (лучше использовать только латинские буквы)
- Директорию, в которой будет создан проект (так же лучше использовать только латиницу)
- IDE, в которой планируется работа над проектом (мы планируем использовать TrueSTUDIO)
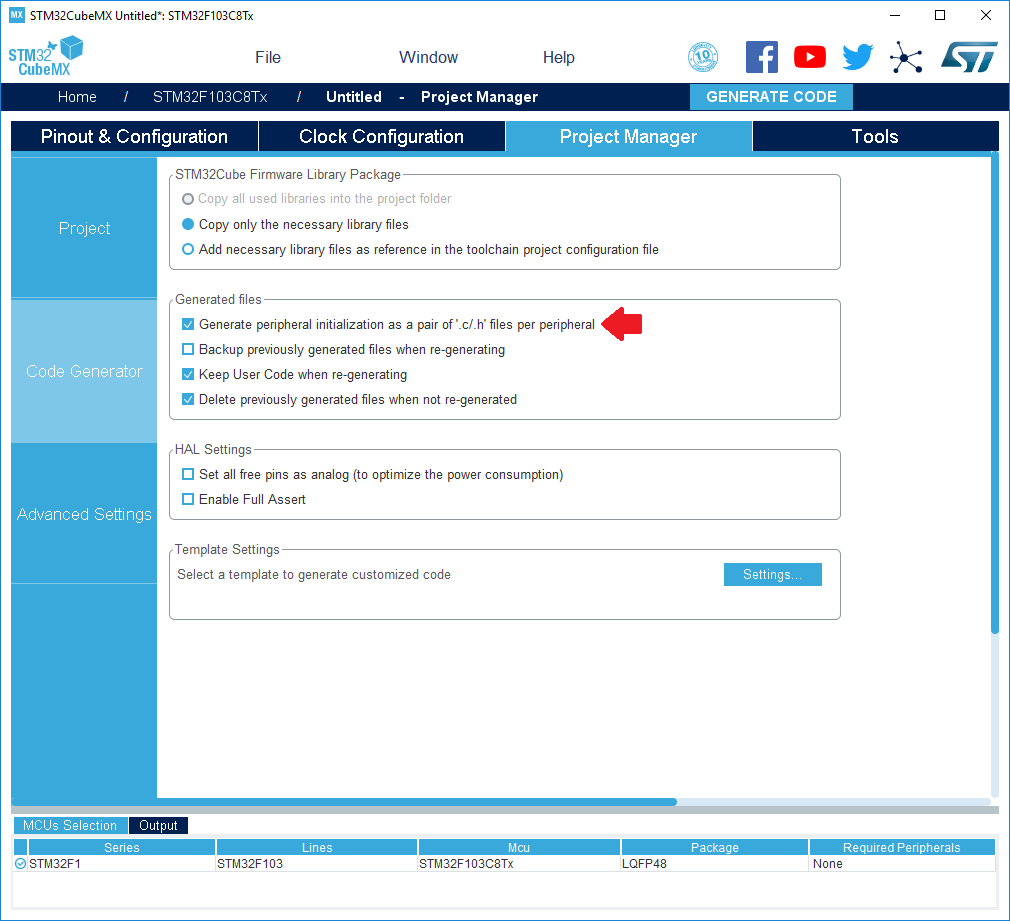
Спускаемся ниже, под вкладка Code Generator.
Здесь обязательно отмечаем опцию Generate peripheral initialization as pair…
Таким образом получим более структурированный проект, в котором для каждого типа периферии имеется своя пара C и H файлов.
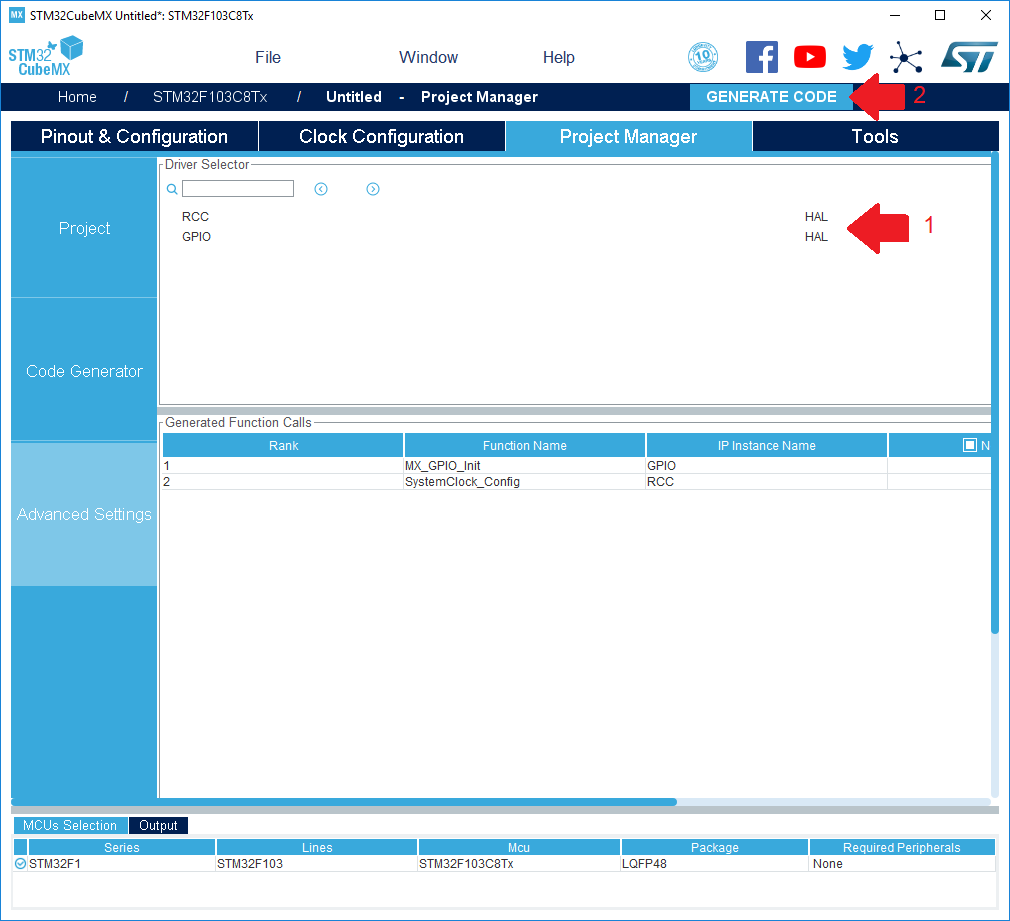
Остался последний шаг. Подвкладка Advanced Settings.
- Выбираем тип библиотеки HAL для всех периферийных модулей
- Собираем проект с текущими настройками
При первоначальном запуске возможно потребуется загрузить актуальную версию библиотеки для выбранного семейства МК.
Даем свое согласие на скачивание файлов:

Идем греть чайник или готовить кофе:
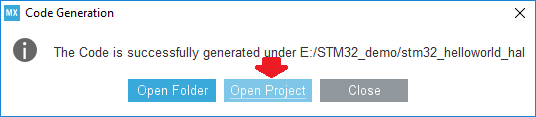
После окончания работы кодо-генератора — сразу же открываем его:
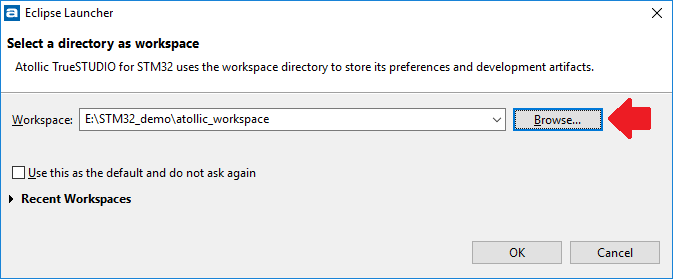
Выбираем любую папку, где Atollic будет хранить рабочее пространство:
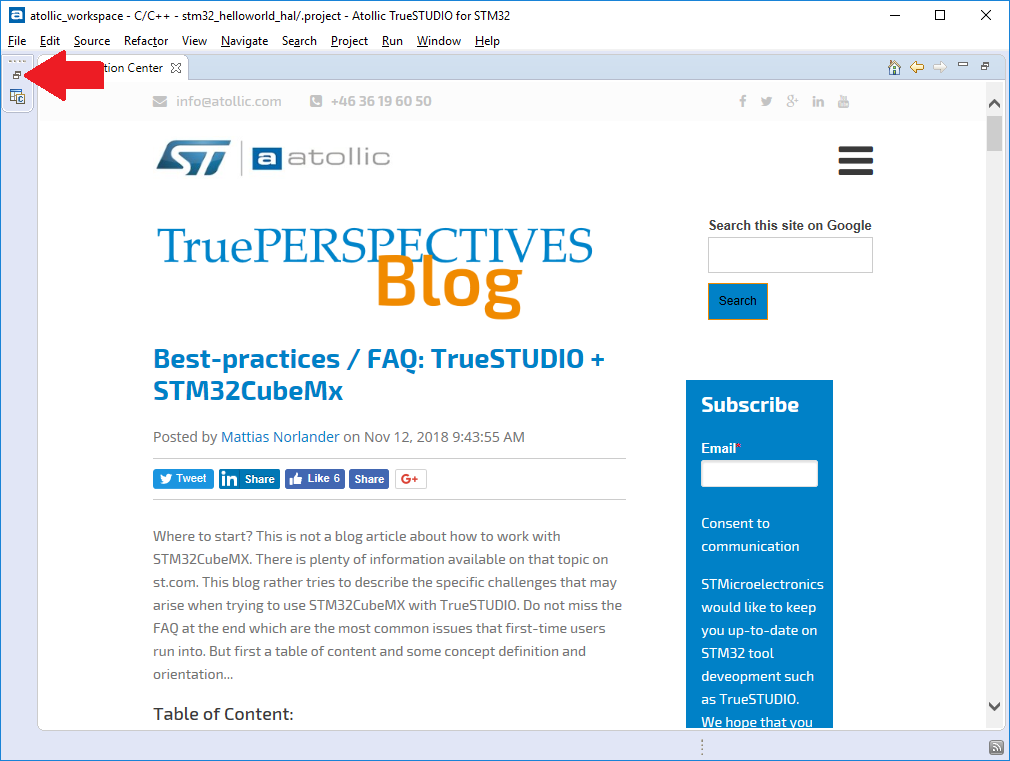
При успешном открытии — перед нами предстанет главное окно Atollic TrueSTUDIO for STM.
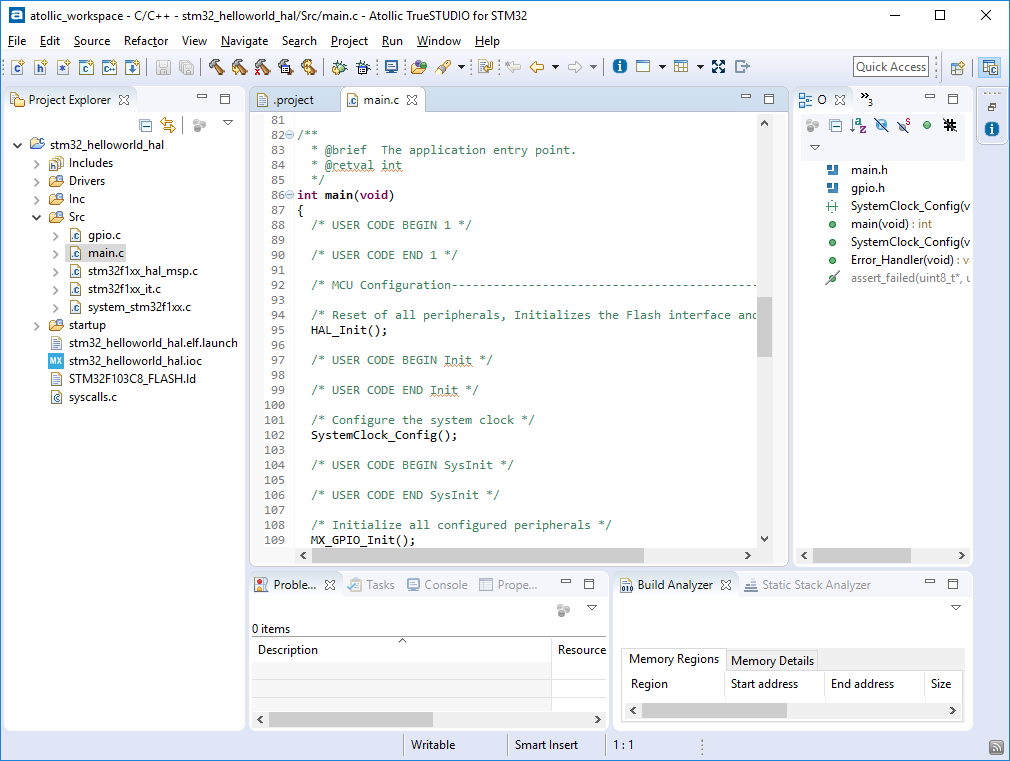
Общая информация нас мало интересует, поэтому сразу перейдем к дереву файлов.
Найдем там файл main.c и функцию int main(void):
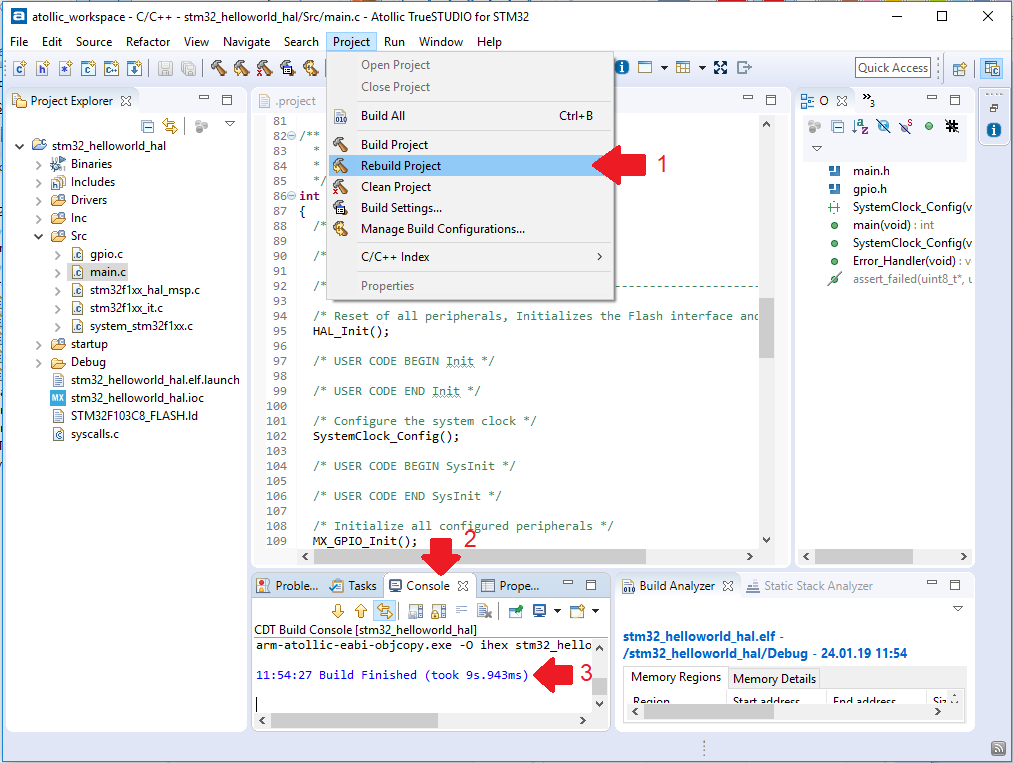
Для самопроверки — попробуем собрать пустой проект
- В меню Project -> Rebuild Project
- Внизу выбрать вкладку Console
- При успешной сборке — должны получить надпись Build Finished
Продолжение — в следующей части.
P.S.: Ранее статью публиковал в своем личном блоге .
Комментарии (23)

pawlo16
01.03.2019 07:26Большое спасибо за годный туториал!
Как на счёт С++? Хотелось бы знать насколько он вообще применим для STM32 в условиях отсутствия кучи. Можно ли использовать размещающий оператор new, деструкторы, stl?ittakir
01.03.2019 07:41Есть там heap (даже в AVR есть).
С++11 IAR ARM, насколько я помню, поддерживает. STL, new и т.д. — все работает.
Просто, если используете динамическую память, то теоретически она станет со временем фрагментированной, вы не сможете выделить большой кусок памяти, и программа упадет. С этим можно жить во многих случаях, ведь любая программа на самом деле может зависнуть и её перезагрузит Watchdog. Уменьшить фрагментацию можно, если использовать аллокацию и деаллокацию памяти только в вызовах функций. Чтобы, когда функция завершилась, все выделенные участки памяти, все объекты были удалены. Например, пришла вам строка из UART. Вы в функции ParseString её разбираете с помощью std::string, std::vector и т.д. А возвращаете результат в главный цикл в виде объекта фиксированного размера, размещенного на стеке.

andreili
01.03.2019 09:28Можно, но на стандартных библиотеках GCC оно отжирает просто фантастические объёмы RAM и ROM под свои нужды. Поэтому — лучше статическое определение классов и их методов.
Вот, как пример такого использования (пока ещё очень сырой вариант, не допиленный до полной инкапсуляции констант и прочего в классы) — github.com/andreili/STM32FX_FM/blob/master/Examples/STM32F4DISCOVERY/src/main.cpp

mkulesh
01.03.2019 11:00С С++ все очень хорошо. Выше уже написали про динамическую память. Я же добавлю, что семантика перемещений (С++11) позволяет создавать классы, описывающие регистры, прерывания, и прочее железо с очень читабельным и удобным синтаксисом. Посмотрите, например, github.com/den-makarov/stm32asyn
Это достаточно мощная С++11 библиотека (на базе HAL), которая в первую очередь предназначена для реализации фонового (через DMA) асинхронного ввода-вывода. Есть SPI, USART, ADC, SDIO. Единственное ограничение — она отлажена пока только на STM32F4. За счёт того, что все железо описывается и инициализируется в одном месте, поддерживается динамическая смена тактовой частоты контроллера. Есть очередь событий, которые генерируются по прерываниям. То есть асинхронные операции через DMA генерируют прерывания, они, в свою очередь, события, а основной поток уже занимается обработкой и диспетчеризацией событий. И все это на С++. Присоединяйтесь!mkulesh
01.03.2019 11:02Прошу прощения за битую ссылку. Вот правильная: github.com/den-makarov/stm32async
SadAngel
01.03.2019 12:00Что мне не нравиться в Cube (прошу прощения за эмоции):
1. Если мне нужна только LL библиотека, всё равно получу смесь HAL и LL, даже если выбирал только LL.
2. Нет возможности выбрать только FreeRTOS без CMSIS RTOS API. (в CMSIS RTOS нет например streaming buffer)
3. При включении прерывания по UART, включаеться только NVIC, а для UART нужно вллючать вручную.
4. Нет возможности отказаться от Timebase Source. Если у меня RTOS и я получаю тик от SysTimer, ну нахрена мне в системе два таймера с прерыванием 1ms (от Timebase Source и SysTimer)
5. Cube генерирует Debug код с оптимизацией по размеру.
Знаю, что можно потом удалить ненужное.




nonpar
02.03.2019 09:04Не знаю пока, как именно вы собираетесь реализовывать Hello World, но ИМХО обмен несколькими символами с юзером — не лучшее средство тестирования средств разработки для MK. Чтобы можно было их сравнивать, следовало бы задействовать, как минимум, прерывания, таймеры и пару-тройку интерфейсов, например, USB, SPI и I2C. Вот тут-то и вылезло бы, к примеру, что для LL обработчик прерывания нужно полностью писать самому, а для HAL достаточно написать callback (который, однако, будет вызываться громоздким HAL-обработчиком).
Shamrel
Поясните, что вы имеете в виду под термином «авто дополнение»? Если классическое дополнению текста по введённой его части, то оно есть. Вводите часть слова, нажимаете Ctrl+пробел, выбираете вариант.
pwl
Я, честно говоря, не помню что там с автодополнением слов, но вот чего там нет, так это выпадающих списков полей, после того как написал имя структуры (а вот при работе с регистрами оно _очень_ помогает), а также прочих «go to definition».
Пару лет назад писал конвертор makefile-ов которые генерит Cube в CMake-овские, а потом открывал их взрослой VisualStudio.
Но сравнительно недавно была на хабре статейка про использование VSCode для STM32. Там вроде уже все это есть без плясок с бубнами.
pwl
Поискал чуть. Оказывается не я один такой конвертор писал. Вот тут уже есть инструкция:
habr.com/ru/post/310742/#comment_9828166
Shamrel
И список полей выводит. Причем Эклипс умеет это делать с дремучих времен. Это в свое время заставило меня перейти с IAR на Эклипс.